Барыкин С.Г., Плотникова Н.В. Системы искусственного интеллекта
Подождите немного. Документ загружается.

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Южно-Уральский государственный университет
Кафедра “Системы управления”
007(07)
Б269
С.Г. Барыкин, Н.В. Плотникова
СИСТЕМЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
Конспект лекций
Челябинск
Издательство ЮУрГУ
2004
УДК 007(07)
Барыкин С.Г., Плотникова Н.В. Системы искусственного интеллекта:
Конспект лекций. – Челябинск: Изд. ЮУрГУ, 2004. – 85 с.
В пособии рассмотрены теоретические и практические вопросы построения
различных систем с элементами искусственного интеллекта; приведены
логические модели и фреймы для представления знаний, примеры построения
систем искусственного интеллекта; рассмотрены вопросы распознавания образов,
приведены алгоритмы обработки изображений в системах технического зрения и
моделях восприятия речи. Материал иллюстрирован описанием конкретных
систем искусственного интеллекта.
Пособие предназначено для студентов специальности 220200 –
«Автоматизированные системы обработки информации и управления», дневного
и заочного отделений, магистерских программ образовательных направлений
553000, 550200, а также может быть полезно студентам других специальностей,
изучающим курс систем искусственного интеллекта.
Ил. 42, табл. 6. список лит. – 15 назв.
Рецензенты: Б.Л. Маринин, Ю.Б. Курочкин.
Издательство ЮУрГУ, 2004.
3
ВВЕДЕНИЕ
В последние годы в нашей стране и за рубежом существенно повысился
интерес к исследованию прикладных интеллектуальных управляющих систем, их
разработке и внедрению в промышленную и непромышленную сферы.
Первые результаты появились благодаря исследованиям, связанным с соз-
данием машинных программ, имитирующих творческую деятельность человека.
Они разрабатывались в рамках научного направления, получившего в дальней-
шем название «искусственный интеллект».
Впервые понятие «интеллектуальная машина» или «интеллектуальная сис-
тема» возникло по меньшей мере два десятка лет тому назад [3].
Интеллектуальные системы в последнее время стали весьма распростра-
ненным коммерческим продуктом, находящим широкий спрос пользователей-
специалистов в самых разнообразных областях инженерно-технической и науч-
но-технической сфер деятельности. Концептуальная архитектура любой интел-
лектуальной (в частности, экспертной) системы общеизвестна и содержит сле-
дующие основные блоки:
– база знаний с развитыми механизмами вывода на знаниях;
– интеллектуальный решатель (формулирующий постановку и общий план ре-
шения задачи);
– интеллектуальный планировщик (формирующий конкретный план решения
задачи);
– система объяснения;
– интерфейс с пользователем.
Интеллектуальные системы могут существенным образом различаться по
архитектуре и выполняемым функциями, но в них всегда в той или иной мере
присутствуют указанные блоки. Для реализации интеллектуальной системы не-
обходимо предусмотреть следующие слои обработки неопределенной информа-
ции (слои интеллектуальности):
– слой прогноза событий
– слой самообучения и адаптации;
– слой работы с базами событий, знаний и формирования решений;
– исполнительный слой.
Каждый из перечисленных слоев имеет свою функциональную специфику
и в реальной системе может состоять из нескольких уровней. При этом в самом
нижнем исполнительном слое могут использоваться классические модели систем
автоматического управления. Все остальные слои более высокого ранга можно
рассматривать как надстройку над традиционными классическими моделями, от-
вечающую требованиям современной информационной технологии работы со
знаниями и существенно расширяющую возможности этих моделей.
В зависимости от того, сколько слоев интеллектуальности имеет та или
иная система, можно говорить о разных степенях ее интеллектуальности.
Интеллектуальные системы – это системы, строящиеся с применением но-
вой информационной технологии обработки и использования знаний.
4
ГЛАВА 1. ПРЕДСТАВЛЕНИЕ ЗНАНИЙ
Термин «знание» в работах по искусственному интеллекту так же значите-
лен, как термин «данные» в области программирования. Переход от данных к
знаниям – логическое следствие развития и усложнения информационных струк-
тур, обрабатываемых на ЭВМ.
1.1.
ЛОГИЧЕСКИЕ МОДЕЛИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
Для описания внешнего мира и поиска решений в искусственном интел-
лекте широко используется язык и аппарат исчисления предикатов [8].
Исчисление предикатов
Для автоматизации процессов постановки и решения интеллектуальных за-
дач необходим адекватный язык. Этот язык должен служить не только и не
столько средством представления знаний (информации), сколько средством ло-
гического анализа интеллектуальных задач.
Обычные человеческие языки, развивавшиеся под влиянием практических
потребностей простоты общения (что далеко не всегда совместимо с точностью
и надёжностью логического анализа), для этой цели плохо подходят. По этой
причине практически необходимо использовать в качестве языка специально
созданный формализованный язык. Такой язык в противоположность обычному
языку должен следовать за логической формой и воспроизводить её даже в
ущерб краткости и лёгкости общения, если это будет необходимо. Главной отли-
чительной чертой такого формализованного языка является наличие в нём осо-
бой системы логического вывода или дедукции.
Логическая функция P(x
1
, …, x
n
), принимающая одно из значений «истина»
или «ложь», аргументы которой пробегают значения из произвольного множест-
ва M, называется предикатом Р в предметной области М. Аргументы x
1
, …, x
n
называются предметными переменным, а их конкретные значения называют
предметными постоянными. Предметные переменные и предметные постоянные
образуют класс логических понятий, называемых термами. В сущности, преди-
кат определяет некоторое отношение относительно объектов из М. При замеще-
нии аргумента
k
x
(предметной переменной) некоторым его значением а (пред-
метной постоянной) n-местный предикат P(x
1
, …, x
n
) превращается в (n–1)-
местный предикат и от x
k
он не зависит. Замена всех переменных предметными
постоянными дает 0-местный предикат или обычное высказывание.
Утверждение, что все x∈ M обладают свойством P(x), записывают с помо-
щью квантора общности ∀ x в виде ∀x P(x), а утверждение, что существует хотя
бы один объект x из М, обладающий свойством P(x), записывают с помощью
квантора существования ∃ x в виде ∃ x P(x). Предикат уже не зависит от пере-
менной, связанной квантором.
Выражения, которые можно образовывать применением к предикатам
кванторов и сентенциональных связок (¬ – отрицание, ∧ – конъюнкция, ∨ –
5
дизъюнкция, →– импликация, ∼ – эквивалентность), представляют собой форму-
лы логики предикатов. Всякая формула без свободных переменных (замкнутая
формула) представляет собой высказывание, которое или истинно, или ложно, а
всякая формула со свободными переменными задает некоторое отношение в
предметной области. Это отношение может быть истинным или ложным в зави-
симости от приписываемых значений свободных переменных. Для установления
значения формулы необходимо сначала определить значения входящих в данную
формулу предикатов при замещении свободных переменных элементами из
предметного множества. Затем последовательно используются общие свойства
сентенциональных связок и кванторов.
Перевод предложений с русского языка на язык логики предикатов при не-
которых навыках не вызывает затруднений. Пусть, например, предикат S(x) оп-
ределяет свойство x быть роботом, т.е. S(x) = «x – робот», а другой предикат
P(x)= «x – манипулятор». Тогда четыре категорических высказывания: а) «всякий
робот есть манипулятор»; б) «никакой робот не является манипулятором»; в)
«некоторые роботы являются манипуляторами»; г) «некоторые роботы не явля-
ются манипуляторами» можно представить символически па языке логики пре-
дикатов:
а)
));()(( xPxSx →∀
б)
));()(( xPxSx ¬→∀
в)
));()(( xPxSx
∧
∃
г)
)).()(( xPxSx ¬
∧
∃
Особый интерес в логике предикатов представляют общезначимые форму-
лы, которые истинны при любом значении входящих в них свободных перемен-
ных и предикатов. Исходя из понятия общезначимости, можно дать следующее
определение логического следствия: формула В логически следует (выводится)
из системы формул (посылок) A: {A
1
, A
2
, …, A
m
}, если формула А →В является
общезначимой. Отметим, что если В логически следует из А, то формула А
∧
¬
В
может принимать только ложные значения. Этот факт выражают также иначе.
Говорят, что множество формул {A
¬
U В} в этом случае является противоречием
(несовместно, неудовлетворимо). Справедливо и обратное утверждение: из не-
удовлетворимости множества формул {A
¬
U В} вытекает логическое следование
В из А.
Язык предикатов широко используется при управлении роботами [9]. Мо-
дель среды робота представляется совокупностью формул исчисления предика-
тов, которым придано «содержание»: формулы интерпретируются как некоторые
утверждения, касающиеся рассматриваемой области. При данной интерпретации
всегда можно вычислить значение любой формулы.
Каждое действие робота может изменить модель среды. Вместе с тем робот
может выполнить только такое действие, которое допустимо для данной модели.
Например, робот не может вставить болт в отверстие, если этот болт не взят
схватом и не ориентирован подходящим образом.
6
Всевозможные действия робота определяются множеством операторов.
Оператор входит в это множество, если существует хотя бы одна модель среды, в
которой этот оператор может быть применен. Необходимо точно определить эф-
фект действия каждого оператора. Условия применимости оператора, формули-
руемые на языке логики предикатов, позволяют установить, можно ли применить
этот оператор в данной модели. Если его можно применить, то необходимо ука-
зать, как трансформируется модель среды после применения оператора.
Пусть М – модель среды, а В – условие применимости некоторого операто-
ра. Неудовлетворимость множества формул {М
¬
U В} означает, что этот опера-
тор может быть применен. Часто оператор может зависеть от параметра, т. е.
)( pBB =
. В этом случае для применимости оператора достаточно найти хотя бы
одно значение параметра p
′
, для которого {
)( pBM
′
¬
U
} является проти-
воречием.
Кроме этого, логическое следование некоторого утверждения из множества
посылок (аксиом) необходимо доказывать и при проверке достижимости цели
управления в данной модели. Пусть B – цель управления, сформулированная па
языке логики предикатов, а М – модель среды, построенная в результате некото-
рых предшествующих действий. Если В логически следует из М, т. е. {М
¬
U В}
является противоречием, то цель управления достигнута. В противном случае
надо искать операторы, применимые в данной модели, с целью дальнейших пре-
образований.
Для построения машинных программ, автоматически доказывающих логи-
ческие следования некоторых утверждений на основе заданного набора посылок,
составляющих содержание модели, можно пользоваться различными правилами
вывода, разработанными в математической логике. Наиболее перспективным
правилом вывода в настоящее время признан метод резолюций (или иначе – ме-
тод резольвенций [11]) Дж. А. Робинсона (1965), который дает наиболее механи-
зируемый алгоритм доказательства. Его преимущество состоит в проверке ми-
нимального числа частных случаев при поиске противоречия.
Рассмотрим простой пример планирования действий манипуляционного
робота, с помощью которого можно проиллюстрировать применение аппарата
логики предикатов. Этот пример представляет такую перефразировку известной
задачи об обезьяне и бананах [9], которая в достаточной степени соответствует
задачам манипуляционных роботов. Кроме этого, в нашем примере, так же как и
в известной системе STRIPS [8], процесс логического доказательства теорем бу-
дет полностью отделен от процесса поиска в пространстве моделей среды (в от-
личие от других систем, в которых для отыскания нужной последовательности
операторов используются исключительно лишь формальные методы логики). В
нашем случае метод доказательства теорем используется только внутри некото-
рой заданной модели среды для ответов на вопросы, касающиеся применимости
различных операторов и достижимости цели. Это позволяет проиллюстрировать
сразу два аспекта рассматриваемого здесь эвристического направления искусст-
7
венного интеллекта: поиск в пространстве состояний и применение формальной
логики.
Пусть роботу-манипулятору дано задание навинтить гайку на болт. Поло-
жение болта задано вектором параметров с, а гайки – вектором b. Схват манипу-
лятора в начальный момент времени находится в положении а. Следовательно,
описание начальной модели среды содержит пять предикатов
¬
¬
¬
=
),схват(
),гайка(
0
aAT
bAT
SCREWED
INHAND
ONBOLT
M
.
Предикат ONBOLT имеет значение «истинно» только тогда, когда гайка
надета на болт, предикат INHAND имеет значение «истинно» только тогда, когда
гайка зажата между губками схвата, а предикат SCREWED имеет истинное зна-
чение, когда выполнено завинчивание.
В распоряжении манипулятора имеются пять операторов (элементарных
движений): «подойти» (u), «переместить» (v), «взять», «надеть», «завинтить».
Первый оператор – «подойти» (u) – выполняет перемещение в точку u только
схвата (без гайки), второй оператор – «переместить» (v) – выполняет перенос
гайки, взятой схватом в точку v. Смысл других операторов понятен, причем для
сокращения дерева поиска мы не учитываем возможность применения таких со-
ответственно противоположных по смыслу операторов, как «отпустить»,
«снять», «отвинтить».
Цель управления – получить такую модель средь из которой логически вы-
текает утверждение SCREWED.
Сначала опишем условия применимости операторов, а также модели сре-
ды, которые возникают после применения каждого оператора. Эти описания для
наших пяти операторов можно представить следующим образом:
1. Оператор «подойти» (u).
Условие применимости:
¬
INHAND.
Результирующая модель среды отличается от модели предшествующей
указанному действию, лишь тем, что вместо предиката AT (схват,
∗ ), где
∗
– лю-
бой терм, появляется предикат AT (схват, u).
2. Оператор «переместить» (v).
Условие применимости:
)).,схват(),гайка()(( x
AT
x
AT
x
I
NHANDONBOL
T
∧
∃
∧
∧¬
Результирующее состояние содержит предикаты
8
¬
¬
),схват(
),гайка(
vAT
vAT
SCREWED
INHAND
ONBOLT
.
3. Оператор «взять».
Условие применимости:
)).,схват(),гайк
а
()((
x
AT
x
AT
x
INHAND ∧
∃
∧
¬
Результирующая модель получается из предшествующей модели путем
снятия знака отрицания у предиката
¬
INHAND.
4. Оператор «надеть».
Условие применимости:
),схват(),гайк
а
( c
AT
c
AT
INHAND
∧
∧
.Результирующая модель среды по-
лучается из предшествующей путем снятия знака отрицания у предиката
.INHAND¬
5. Оператор «навинтить».
Условие применимости:
),схват(),гайк
а
( c
AT
c
AT
I
NHANDONBOL
T
∧
∧
∧
. В
результате применимости этого оператора будет снят знак отрицания у предика-
та
¬ SCREWED.
Теперь перейдем к поиску последовательности операторов, обеспечиваю-
щих выполнение заданной технологической операции. Получить целевую модель
среды можно с помощью метода проб и ошибок, применяя возможные операто-
ры к начальной
И последующим моделям и всякий раз пытаясь доказать, что ут-
верждение SCREWED логически следует из утверждений, порожденных послед-
ним применением некоторого оператора. Так как очевидно, что модель среды M
0
,
дополненная отрицанием целевого предложения, не содержит противоречия, мы
заключаем, что цель в исходной модели не достигнута. Затем методом простей-
шего перебора определяем, какой из операторов применим. С этой целью можно
искать доказательство того, что условие применимости оператора следует из M
0
.
Человек сразу определил бы, что в модели M
0
можно применить только оператор
подойти (u), но машинная программа будет аккуратно проверять условия приме-
нимости каждого оператора. Например, для оператора «надеть» программа сна-
чала составит отрицание условия применимости
),схват(),гайка( c
AT
c
AT
INHAND
¬
∨
¬
∨
и попробует доказать, что это предложение вместе с M
0
образует противоречие.
Но это ей не удастся. Поэтому будет сделан вывод, что данный оператор непри-
меним. Аналогичным образом машинная программа установит, что непримени-
мы в M
0
операторы «переместить» (v), «взять», «навинтить», но применим опера-
тор «подойти» (u), поскольку множество формул { M
0
U INHAND} неудовлетво-
римо.
В результате применения оператора «подойти» (u) возникает новая модель
среды с параметром u:
9
¬
¬
¬
=
),схват(
),гайка(
)(
1
uAT
bAT
SCREWED
INHAND
ONBOLT
uM
.
Как только появляется новая модель среды, необходимо выяснить, сущест-
вует ли по крайней мере частный случай модели, из которой следует целевое ут-
верждение. В данном случае ни при каком значении u из M
1
(u) целевая модель
логически не следует.
Далее находим операторы, которые можно применить в модели M
1
(u). По-
прежнему можно применить оператор «подойти»
(u), но он оставляет модель M
1
без изменений. Подстановка в M
1
вместо u величины b дает частный случай этой
модели, в которой можно применить оператор «переместить» (v). Обозначим
этот частный случай через M
1
(b). В этом частном случае применимы операторы
«подойти» (u), который снова дает старую модель, и «взять».
Второй оператор порождает модель
¬
¬
=
),схват(
),гайка(
2
bAT
bAT
SCREWED
INHAND
ONBOLT
M
.
Опять методом простого перебора устанавливаем, что оператор «перемес-
тить» (v) дает новую модель
¬
¬
=
),схват(
),гайка(
)(
3
vAT
vAT
SCREWED
INHAND
ONBOLT
vM
причем предшествующая модель является частным случаем полученной модели
M
2
=M
3
(b).
Однако гораздо интереснее другой частный случай – M
3
(c). В этой модели
условие применимости оператора «надеть» уже является логическим следствием.
Применение этого оператора снимает знак отрицания у предиката
¬ ONBOLT и
тем самым обеспечивает условие применимости оператора «навинтить». В по-
10
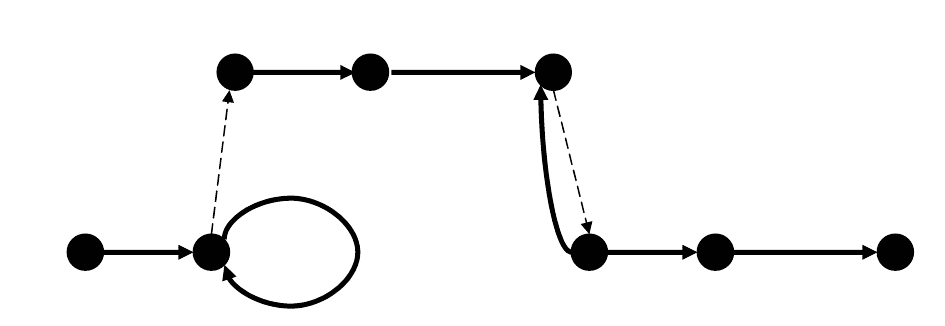
«Подойти»
(
u
)
» «Надеть» «Навинтить»
М
0
М
1
(
u
)
М
3
(
c
)
М
4
М
5
Подстановка u = b Подстановка v = c
«Взять» «Пе
р
еместить»
(
v
)
»
следних моделях допустимы и некоторые другие операторы, но они возвращают
процесс поиска к уже пройденным моделям.
Весь процесс поиска целевой модели наглядно представлен на рис. 1.1. как
процесс поиска дуги на графе, каждая вершина которого представляет собой не-
которое состояние (модель), а каждая дуга характеризует действие, допустимое в
том состоянии, из которого эта дуга выходит.
Рис. 1.1. Граф действий и состояний при автоматическом планировании
операции «навинчивание гайки на болт»
Таким образом, логически доказывая условия применимости операторов,
исходя из множества утверждений текущей модели, находим допустимые опера-
торы и частные случаи модели, которые порождают новые допустимые действия
и новые модели. Построив целевую модель, с помощью обратного хода на графе
извлекаем план выполнения заданной технологической операции. В данном слу-
чае этот план реализуется последовательностью операторов: «подойти» (b);
«взять» «переместить» (с); «надеть»; «навинтить». Каждое элементарное движе-
ние этой синтезированной последовательности может быть реализовано на так-
тическом уровне системы управления в рамках кинематических алгоритмов.
Рассмотренный пример очень прост. С его помощью показано, что на стра-
тегическом уровне системы управления с помощью эвристического поиска мо-
жет быть хотя бы в принципе синтезирована последовательность действий, исхо-
дя из технологического задания. В задачах, имеющих практическую важность,
число вершин выстраиваемого графа, как правило, очень велико, а доказательст-
во теорем в сложной модели среды может потребовать значительной оператив-
ной памяти ЦВМ нереального машинного времени.
Кроме этого, адекватное внутреннее представление «рабочего мира» робо-
та во всем его многообразии – далеко не решенная задача. Аппарат логики пре-
дикатов предлагает здесь лишь некоторые возможности. Предложенные в на-
стоящее время решения двух основных проблем искусственного интеллекта:
проблемы эвристик и проблемы представления среды следует рассматривать как
только первые приближения).
М
1
(b) М
2
М
3
(v)