Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.

71
Аналогично доказывается, что если пара (A, c) неполностью на-
блюдаема, то W (p) вырождена.
Таким образом, если функция W (p) невырождена, то пара (A, b)
полностью управляема, а пара (A, c) полностью наблюдаема.
Для рассматриваемого случая (m = ` = 1) теорема доказана.
2. Векторный случай (m + ` > 2).
Д о с т а т о ч н о с т ь. Предположим, что функция W (p) невырож-
дена, т.е. если p
0
— произвольный корень многочлена ∆(p), то суще-
ствует такой минор µ(p) матрицы W (p) порядка r, что имеет место
соотношение
lim
p→p
0
∆(p)µ(p) 6= 0. (11)
Докажем, что тогда система (1) полностью управляема и полностью
наблюдаема.
Обозначим через b
1
, . . . , b
m
и c
1
, . . . , c
l
столбцы матриц b и c со-
ответственно, а через w
ij
(p) (i = 1, . . . , l; j = 1, . . . , m) – элементы
матрицы W (p), так что
b = (b
1
, . . . , b
m
), c = (c
1
, . . . , c
l
), W (p) =
¡
w
ij
(p)
¢
i=1,...,l; j=1,...,m
.
Очевидно, w
ij
(p) = c
∗
i
(A − pI)
−1
b
j
. Минор µ(p) имеет вид
µ(p) = det
w
i
1
j
1
(p) . . . w
i
1
,j
r
(p)
.
.
.
w
i
r
j
1
(p) . . . w
i
r
,j
r
(p)
. (12)
Введем в рассмотрение матрицу
Q(p) =
A − pI b
j
1
. . . b
j
r
c
∗
i
1
0 . . . 0
.
.
.
c
∗
i
r
0 . . . 0
. (13)
Применяя к матрице Q(p) лемму Шура, получаем
det Q(p) = det(A − pI) · det
−
c
∗
i
1
.
.
.
c
∗
i
r
(A − pI)
−1
(b
j
1
, . . . , b
j
r
)
(14)
72
(для значений p, таких, что det(A − pI) 6= 0). Легко видеть, что
определитель матрицы, заключенной в фигурной скобке равенства
(14) есть с точностью до знака минор µ(p). Поэтому из (14) имеем
det Q(p) = (−1)
n+r
∆(p)µ(p). (15)
Перейдем в равенстве (15) к пределу при p → p
0
. Учитывая (11),
получим, что
det Q(p
0
) 6= 0. (16)
Поэтому все n+r строк матрицы Q(p
0
) линейно независимы, а следо-
вательно, линейно независимы и n ее первых строк. Таким образом,
rank (A − p
0
I, b
j
1
, . . . , b
j
r
) = n. (17)
Отсюда тем более
rank (A − p
0
I, b) = n. (18)
Рассуждая аналогично, мы получим, что
rank
¡
(A − p
0
I)
∗
, c
¢
= n. (19)
Итак, мы установили, что для произвольного корня p
0
многочлена
∆(p) имеют место соотношения (18) и (19). Поскольку для любого
p 6= p
0
∆(p) = det(pI − A) 6= 0, то rank (A − pI) = n ∀p 6= p
0
.
Следовательно, для любого комплексного p
rank (A − pI, b) = n, (20)
rank
¡
(A − pI)
∗
, c)
¢
= n. (21)
В силу свойства (V II
y
) полной управляемости и соответствующего
свойства (V II
н
) полной наблюдаемости (получающегося из (V II
y
)
по теореме двойственности Калмана) из соотношений (20) и (21) сле-
дует полная управляемость и полная наблюдаемость системы (1).
Н е о б х о д и м о с т ь. Допустим теперь, что система (1) полностью
управляема и наблюдаема. Покажем, что матричная передаточная
функция W (p) невырождена, т.е. что имеет место соотношение (11).
Пусть p
0
— произвольный корень многочлена ∆(p), а дефект мат-
рицы A − p
0
I равен r, т.е.
rank (A − p
0
I) = n − r. (22)
Так как det(A−p
0
I) = 0, то, очевидно, r ≥ 1. В силу свойства (V II
y
)
полной управляемости и (V II
н
) полной наблюдаемости будут иметь
73
место соотношения (18) и (19). Отсюда, с учетом (22), выводим, что
существуют r линейно независимых столбцов b
j
1
, . . . , b
j
r
матрицы b
и r линейно независимых столбцов c
i
1
, . . . , c
i
r
матрицы c таких, что
имеют место (17) и аналогичное ему равенство
rank
¡
(A − p
0
I)
∗
, c
∗
i
1
, . . . , c
∗
i
r
¢
= n. (23)
Рассмотрим матрицу Q(p) и минор µ(p) порядка r, введенные вы-
ше по формулам (13) и (12) соответственно. Получим, как и вы-
ше, формулу (15). Для доказательства соотношения (11) достаточно
установить (16), что равносильно тому, что линейная система
Q(p
0
)z = 0 (24)
относительно вектора z (порядка n + r) имеет только тривиальное
решение z = 0.
Запишем (24) в развернутом виде. Пусть z = (ξ
1
, . . . , ξ
n
, η
1
, . . . , η
r
)
∗
.
Тогда
(A − p
0
I)ξ + η
1
b
j
1
+ . . . + η
r
b
j
r
= 0, (25)
c
∗
i
ξ = 0, . . . , c
∗
i
r
ξ = 0, (26)
где ξ = (ξ
1
, . . . , ξ
n
)
∗
.
Введем матрицы
Q
j
k
= (b
j
1
, . . . , b
j
k−1
, b
j
k+1
, . . . , b
j
r
) (k = 1, . . . , r).
В силу (22) и выбора векторов b
j
1
, . . . , b
j
r
справедливо неравенство
rank (A − p
0
I, Q
j
k
) < n.
Отсюда следует, что при любом k = 1, . . . , r существует ненулевой
вектор z
k
(порядка n) такой, что
z
∗
k
(A − p
0
I) = 0, z
∗
k
Q
j
k
= 0. (27)
При этом, поскольку имеет место равенство (17), то
z
∗
k
b
j
k
6= 0 (k = 1, . . . , r), (28)
иначе, все строки матрицы в (17) были бы линейно независимы и,
следовательно, нарушалось бы равенство (17).
Умножая слева уравнение (25) последовательно на векторы
z
∗
1
, . . . , z
∗
r
, в силу (27), получим
η
1
z
∗
1
b
j
1
= 0, . . . , η
r
z
∗
r
b
j
r
= 0.

74
Отсюда, учитывая (28), имеем
η
1
= η
2
= . . . = η
r
= 0.
В силу последних равенств уравнения (25), (26) можно переписать
так:
ξ
∗
(A − p
0
I)
∗
= 0, ξ
∗
c
i
1
= 0, . . . , ξ
∗
c
i
r
= 0. (29)
Так как имеет место равенство (23), то из (29) следует, что ξ = 0.
Таким образом, система (25), (26) (или (24)) имеет только нулевое
решение ξ = 0, η
1
= 0, . . . , η
r
= 0 (или z = 0).
Итак, нами установлено соотношение (16), а вместе с ним и (11).
Теорема 2 полностью доказана.
Следствие. Пусть передаточная функция W (p) системы (1) со
скалярным входом u ∈ R и скалярным выходом y ∈ R
(m = ` = 1; b, c ∈ R
n
) имеет вид
W (p) =
c
n
p
n−1
+ c
n−1
p
n−2
+ ··· + c
1
p
n
+ a
n
p
n−1
+ ··· + a
1
,
где числитель и знаменатель не имеют общих нулей (т.е. W (p) —
невырождена.)
Тогда систему (1) невырожденным линейным преобразованием
переменных можно привести к виду
˙x
1
= x
2
,
.
.
.
˙x
n−1
= x
n
˙x
n
= −a
1
x
1
− ··· − a
n
x
n
+ u,
y = c
1
x
1
+ ··· + c
n
x
n
,
Д о к а з а т е л ь с т в о следует непосредственно из теоремы 2
и теоремы из § 2.
Замечание 1. Во второй части (векторный случай) доказатель-
ства теоремы 2 нами одновременно установлено, что если система
(1) полностью управляема и наблюдаема, то существует такой ми-
нор µ(p) порядка r, равный дефекту матрицы A−p
0
I, что выполнено
(11). Обратное утверждение — если (11) имеет место для минора µ(p)
любого порядка, то система (1) полностью управляема и наблюдаема
— также доказано выше.
75
Из замечания 1 следует, что при m > 1, или при l > 1 проверку
условия невырожденности (5) можно проводить не для всех миноров
µ(p) матрицы W (p), а лишь для миноров µ(p), имеющих порядок r,
равный дефекту матрицы A − p
0
I.
Замечание 2. Пусть ρ(b) — ранг матрицы b и ρ(c) — ранг мат-
рицы c, а r — дефект матрицы A − p
0
I (p
0
— произвольный корень
многочлена ∆(p) = det(A − p
0
I)). Тогда, в силу следствия 3 теоре-
мы из §1, если r > ρ(b), то система (1) неполностью управляема и,
если r > ρ(c), то по теореме двойственности Калмана система (1)
неполностью наблюдаема.
Поэтому необходимыми условиями невырожденности матричной
передаточной функции W (p) являются неравенства
r ≤ ρ(b), r ≤ ρ(c). (30)
Итак, условие (5) следует проверять лишь для миноров µ(p) порядка
r и при выполнении неравенств (30).
Поскольку дефект r (равный числу жордановых клеток матрицы
A, отвечающих собственному значению p
0
) не превосходит кратности
ν
0
корня p
0
, то в случае когда дефект r не известен, условие (5) сле-
дует проверять для миноров µ(p), порядок которых не превосходит
min{ρ(b), ρ(c), ν
0
}.
76
ГЛАВА III
СТАЦИОНАРНАЯ СТАБИЛИЗИРУЕМОСТЬ
ЛИНЕЙНЫХ СИСТЕМ
§ 1. Устойчивость линейной системы
с постоянными коэффициентами
Рассмотрим теперь вопрос о том, можно ли сделать систему
˙x = Ax + bu, y = c
∗
x, (1)
где A, b и c — вещественные постоянные матрицы порядков n × n,
n × m и n × ` соответственно, x ∈ R
n
— состояние, u ∈ R
m
— вход
или управление, y ∈ R
`
— выход, устойчивой за счет выбора управ-
ления u, которое формируется как линейная комбинация координат
вектора y:
u = s
∗
y. (2)
Здесь s — постоянная (` × m)-матрица. Если существует хотя бы
одно такое управление, то систему (1) называют стабилизируемой,
а соответствующее управление (2) — стабилизирующим.
Всюду в дальнейшем мы рассматриваем только вещественные мат-
рицы, поэтому слово "вещественный"будем далее часто опускать.
При рассмотрении отдельных вопросов (например, при доказа-
тельстве теоремы 1 настоящего параграфа) мы, не оговаривая это
особо, считаем, что исходное пространство и операторы (определя-
емые матрицами), действующие в нем, комплексифицированы (см.
§ 2, гл.I), так что рассматриваемые векторные переменные могут при-
нимать, вообще говоря, комплексные значения.
Сначала рассмотрим асимптотическую устойчивость разомкнутой
системы ˙x = Ax , когда в (1) отсутствует управление (u=0).
1. Устойчивость по Ляпунову. Пусть дана система дифферен-
циальных уравнений, записанная в виде векторного уравнения
˙x = f (t, x), t ∈ R
1
, x ∈ R
n
, (3)
77
где вектор-функция f( t, x) = (f
1
(t, x), . . . , f
n
(t, x))
∗
кусочно–непре-
рывна по независимой переменной t в интервале I
+
t
= {a < t <
+∞} (a ∈ R) и удовлетворяет условию Липшица по зависимым пе-
ременным x
1
, . . . , x
n
во всем пространстве R
n
, x = (x
1
, . . . , x
n
)
∗
. Знак
∗ означает транспонирование.
При этих условиях справедлива т е о р е м а с у щ е с т в о в а н и я
и е д и н с т в е н н о с т и решений дифференциального уравнения (3)
([16,125,129,149]): для любых t
0
∈ I
+
t
, x
0
∈ R
n
существует един-
ственное решение x(t) уравнения (3), определенное на некотором
интервале (t
0
− α, t
0
+ α) и удовлетворяющее начальному условию
x(t
0
) = x
0
, т.е. однозначно разрешима соответствующая задача
Коши. При этом под решением x(t) уравнения (3) понимается непре-
рывная на интервале I
+
t
вектор-функция, удовлетворяющая уравне-
нию (3) в интегральной форме
x(t) = x(t
0
) +
t
Z
t
0
f(τ, x(τ)) dτ.
Пусть x(t; t
0
, x
0
) — решение уравнения (3) с начальным условием
x(t
0
; t
0
, x
0
) = x
0
, определенное на интервале (t
0
, +∞) (t
0
∈ I
+
t
). Нас
будет интересовать поведение других решений с близкими началь-
ными условиями.
О п р е д е л е н и е 1 ([107]). Решение x(t; t
0
, x
0
) (t
0
≤ t < ∞)
уравнения (3) н а з ы в а е т с я у с т о й ч и в ы м п о Л я п у н о в у при
t → +∞ (или устойчивым), если для [any]любого ε > 0 существует
δ = δ(ε, t
0
) > 0 такое, что
1) все решения x = x(t; t
0
, y
0
) уравнения (3), удовлетворяющие
условию
ky
0
− x
0
k < δ,
определены в промежутке [t
0
, +∞);
2) для этих решений выполняется неравенство
kx(t; t
0
, y
0
) − x(t; t
0
, x
0
)k < ε для всех t ∈ [t
0
, +∞).
Иными словами, решение x(t; t
0
, x
0
) устойчиво, если достаточно
близкие к нему в начальный момент времени t
0
решения x(t; t
0
, y
0
)
78
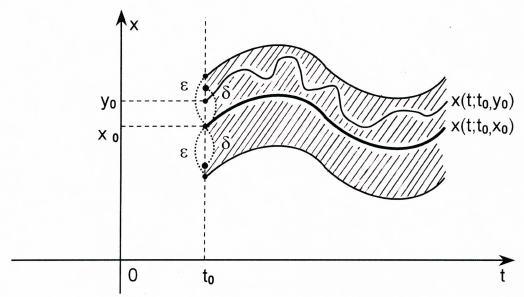
остаются для всех t ≥ t
0
в сколь угодно узкой ε-трубке, построенной
вокруг решения x(t; t
0
, x
0
) (рис. 5).
Рис. 5. Устойчивое решение x(t; t
0
, x
0
) cистемы (1).
Можно также сказать, что устойчивость по Ляпунову решения
x(t; t
0
, x
0
) — это равномерная на промежутке [t
0
, +∞) сходимость к
x(t; t
0
, x
0
) решений x(t; t
0
, y
0
), начальные значения y
0
которых стре-
мятся к начальному значению x
0
рассматриваемого решения x(t; t
0
, x
0
)
Следует отметить, что сходимость значений решений x(t; t
0
, y
0
)
при [any]любом фиксированном t ∈ [t
0
, +∞) гарантируется теоре-
мой о непрерывной зависимости решения от начального условия;
здесь важна именно равномерная сходимость, т.е. независимость δ
от t ∈ [t
0
, +∞).
Замечание 1. Если система (3) линейна по x, т.е.
f(t, x) = A(t)x + g(t) (t ∈ R, x ∈ R
n
),
матрица-функция A(t) и вектор-функции g(t) кусочно-непрерывны
в промежутке I
+
t
, то, как хорошо известно из общего курса диффе-
ренциальных уравнений (см., например,[16,125,129,149]), все реше-
ния системы (3) продолжаемы на бесконечный интервал I
+
t
. Поэто-
му для линейных систем в определении 1 устойчивости по Ляпунову
условие 1) можно опустить.
79
Замечание 2. Исследование устойчивости решения x(t; t
0
, x
0
)
(невозмущенного движения) всегда можно свести к исследованию
устойчивости тривиального решения (положения равновесия) x = 0.
Действительно, полагая
z = x − x(t; t
0
, x
0
)
(z есть отклонение возмущенного движения x(t; t
0
, y
0
) от невозму-
щенного движения
x
(
t
;
t
0
, x
0
)
), получим дифференциальное уравне-
ние для z:
˙z = g(t, z), (4)
где
g(t, z) =
£
f(t, z + x(t; t
0
, x
0
)) − f(t; x(t; t
0
, x
0
))
¤
.
Очевидно,
g(t, 0) ≡ 0.
Следовательно, уравнение (4) имеет тривиальное решение z = 0,
которое соответствует (в новых переменных z) исходному решению
x(t; t
0
, x
0
).
В силу сделанного выше замечания, не умаляя общности, в урав-
нении (3) всегда можно считать (переобозначив z = x, g = f )
f(t, 0) ≡ 0.
Неустойчивость по Ляпунову — это логическое отрицание устой-
чивости по Ляпунову.
О п р е д е л е н и е 2. Решение x(t; t
0
, x
0
) (t
0
≤ t < +∞)) уравне-
ния (3) называется н е у с т о й ч и в ы м п о Л я п у н о в у , если
1) либо в [any]любой окрестности точки x
0
найдется такая точ-
ка y
0
, что решение x(t; t
0
, y
0
) с начальным условием x(t
0
; t
0
, y
0
) = y
0
непродолжаемо при t
0
≤ t < +∞;
2) либо для [some]некоторого ε
0
> 0 и [any]любого δ > 0 суще-
ствуют хотя бы одна точка y
δ
0
и момент t
∗
= t
∗
(δ) > t
0
такие,
что
ky
δ
0
− x
0
k < δ и kx(t
∗
; t
0
, y
δ
0
) − x(t
∗
; t
0
, x
0
)k ≥ ε
0
.
О п р е д е л е н и е 3 . Решение x(t; t
0
, x
0
) (t
0
≤ t < +∞) урав-
нения (3) называется а с и м п т о т и ч е с к и у с т о й ч и в ы м при
t → +∞, если
80
1) это решение устойчиво по Ляпунову;
2) существует число ∆ > 0 такое, что для [any]всякого решения
x(t; t
0
, y
0
) (t
0
≤ t < +∞) с начальным условием y
0
, удовлетворяю-
щим неравенству ky
0
− x
0
k < ∆, выполняется предельное соотно-
шение
lim
t→+∞
kx(t; t
0
, y
0
) − x(t; t
0
, x
0
)k = 0. (5)
Если в определении 3 ∆ = ∞, т.е. 1) решение x(t; t
0
, x
0
) устойчиво
по Ляпунову и 2) все решения x(t; t
0
, x
0
) (t
0
≤ t < +∞) обладают
свойством (5), то решение x(t; t
0
, x
0
) называется асимптотически
устойчивым в целом (в этом случае областью притяжения решения
x(t; t
0
, x
0
) является все пространство R
n
).
2. Критерий асимптотической устойчивости линейной си-
стемы с постоянной матрицей.
Теорема 1. Положение равновесия x = 0 линейной системы
˙x = Ax, x ∈ R
n
, (6)
с постоянной матрицей A асимптотически устойчиво в целом то-
гда и только тогда, когда все собственные числа λ
j
(A) матрицы A
лежат в левой полуплоскости:
Re λ
j
(A) < 0 (j = 1, . . . , n).
Д о к а з а т е л ь с т в о.
1. Д о с т а т о ч н о с т ь. Пусть λ
1
, . . . , λ
m
— различные собственные
числа матрицы A (m ≤ n), причем
Re λ
i
< 0 (i = 1, . . . , m). (7)
Решение уравнения (6) с начальным условием x(t
0
) = x
0
, x
0
∈ R
n
,
есть
x(t) = e
A(t−t
0
)
x
0
. (8)
Используя оценку нормы матричной экспоненты (cм. § 4, гл. I), будем
иметь
ke
A(t−t
0
)
k ≤ C
ν
e
(α+ν)(t−t
0
)
∀t ∈ [t
0
, +∞) (9)