Загиров Н.Н. Теория обработки металлов давлением
Подождите немного. Документ загружается.


201
Мощность, затрачиваемая на преодоление сил трения на контактной
поверхности,
∫∫
τϑ
=
τ
F
FN d
тр
,
где τ - напряжение трения;
ϑ
τ
- скорость скольжения металла по инструменту;
F - площадь контактной поверхности металла с инструментом.
Мощность сил среза
∫∫
ϑ
∆
τ
=
S
SN d
сртр
,
где τ
ср
- напряжение среза;
∆ϑ - перепад скоростей на границе среза;
S - площадь поверхности среза.
Во всех приведенных уравнениях можно заменить скорость
деформации и скорость перемещения на просто деформации и перемещения,
тогда вместо мощностей получим соответствующие работы и будем иметь
дело с балансом работ.
Решение задачи указанным методом осуществляется по следующей
схеме:
1. Определяется система и выбираются направления осей координат.
2. Формируется кинематически возможное поле скоростей (проекции вектора
скорости перемещения на оси координат), удовлетворяющее принятым
граничным условиям.
3. Используя условие несжимаемости, находятся неизвестные составляющие
поля скоростей.
4. Назначается условие пластичности и задается закон трения на контактной
поверхности.
5. Определяют величины, входящие в формулы для нахождения N
д
и N
тр
, и
составляют уравнение баланса мощностей.
Усилие Р
к
, определенное по кинематически возможному полю
скоростей, не может быть меньше действительного усилия Р.
Рассмотрим сущность данного метода на примере определения усилия
осадки прямоугольного параллелепипеда. Напомним, что та же задача
202
решалась ранее инженерным методом, поэтому результирующая формула,
при условии действия тех же допущений, должна быть идентична
полученной ранее.
При решении задачи по-прежнему будет считать, что:
- перемещение частиц тела в направлении оси z отсутствует, поэтому
составляющая вектора скорости перемещения υ
z
= 0;
- сечение заготовки, контактирующее с верхним подвижным пуансоном,
перемещается вниз со скорость υ;
- на поверхности контакта действует закон трения по Зибелю
3
S
S
σ
ψ=ψτ=τ ;
- мощность сил среза N
ср
= 0.
В декартовой прямоугольной системе координат зададимся
составляющей υ
y
вектора скорости перемещения, которая должна
удовлетворять следующим граничным условиям:
0
0
=υ
=yy
;
υ−=υ
=hyy
.
Наиболее простой является линейная функция вида:
y
y
y
υ−=υ .
Тогда компонента ξ
yy
тензора скорости деформации определяется как
hy
y
yy
υ
−=
∂
υ
∂
=ξ
Из условия несжимаемости ξ
xx
+ ξ
yy
+ ξ
zz
= 0 при условии, что
0=
∂
υ
∂
=ξ
z
z
zz
, найдем:
h
yyxx
υ
=ξ−=ξ
203
Тогда составляющая υ
x
вектора скорости перемещения будет равняться
∫ ∫
υ
=
υ
=ξ=υ x
h
x
h
x
xxx
dd .
Остальные компоненты тензора скорости деформации
ξ
xy
= ξ
xz
= ξ
yz
= 0.
В соответствии с формулой
( ) ( )
( )
(
)
222
222
6
3
2
yzxzxyzzxxzzyyyyxx
H ξ+ξ+ξ+ξ−ξ+ξ−ξ+ξ−ξ=
Интенсивность скоростей деформации сдвига
h
H
υ
= 2 .
Величина Т по условию наступления пластического течения
3
S
S
T
σ
=τ=
Мощность, необходимая для деформации заготовки
∫∫∫ ∫∫∫
υσ=
υ
σ
==
2
00
2
0
д
3
2
ddd2
3
4d
/b h/l
S
S
blzyz
h
VTHN
Скорость скольжения металла по инструменту
x
h
hy
yx
υ
=υ=υ
=
=τ 0
.
204
Мощность, затрачиваемая на преодоление сил трения на верхней и нижней
контактных поверхностях:
∫∫
υ
∫
ψσ
∫
=
υ
σ
ψ⋅=τυ=
τ
F
/b
S
/b
S
h
lb
zxx
h
FN
2
2
0
2
0
тр
32
1
dd
3
42d .
Далее составляем уравнение баланса мощностей
h
lb
blNNPN
SS
2
трд
32
1
3
2
υψσ+υσ=+=υ⋅=
.
После сокращения правой и левой части уравнения на величину υ и
вынесения общего множителя за скобки, имеем:
⋅
ψ
+σ=
h
b
,lbP
S
32
151
.
Таким образом, в результате решения задачи энергетическим методом
выведем формулу для расчета усилия осадки прямоугольного
параллелепипеда, идентичную полученной ранее.
Контрольные вопросы
1. Базовое положение энергетического метода.
2. Как определяется мощность, подводимая к деформируемому телу со
стороны инструмента?
3. Алгоритм решения задачи энергетическим методом.
4. Какой закон трения принимается в случае осадки прямоугольного
параллелепипеда?
5. Как определяется скорость скольжения металла по инструменту при
осадки прямоугольного параллелепипеда?
6. Как определяется усилие осадки прямоугольного параллелепипеда?
7. Какая принимается мощность сил среза при осадки прямоугольного
параллелепипеда?
205
ЛЕКЦИЯ 41
ОСОБЕННОСТИ РЕАЛИЗАЦИИ ЭНЕРГЕТИЧЕСКОГО МЕТОДА
ПРИ РЕШЕНИИ ЗАДАЧ
В ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
План лекции:
1. Особенности реализации энергетического метода при решении задач в
цилиндрической системе координат.
2. Примеры решения задач в цилиндрической системе координат.
При решении задач энергетическим методом в цилиндрической
системе координат последовательность действий и общий вид формул для
нахождения составляющих уравнения баланса мощностей в целом не
меняется. Изменения касаются только нюансов нахождения отдельных
величин, входящих в формулы, и связано это с особенностями
дифференцирования и интегрирования функций по переменным r, ϕ, z.
Рассмотрим сущность данного метода на примере определения
потребной мощности для осуществления процесса скручивания заготовки в
контейнере с одновременным приложением осевой нагрузки. Этот процесс
используется на заготовительных операциях объемной штамповки для
сообщения литой заготовке необходимых физико-механических свойств
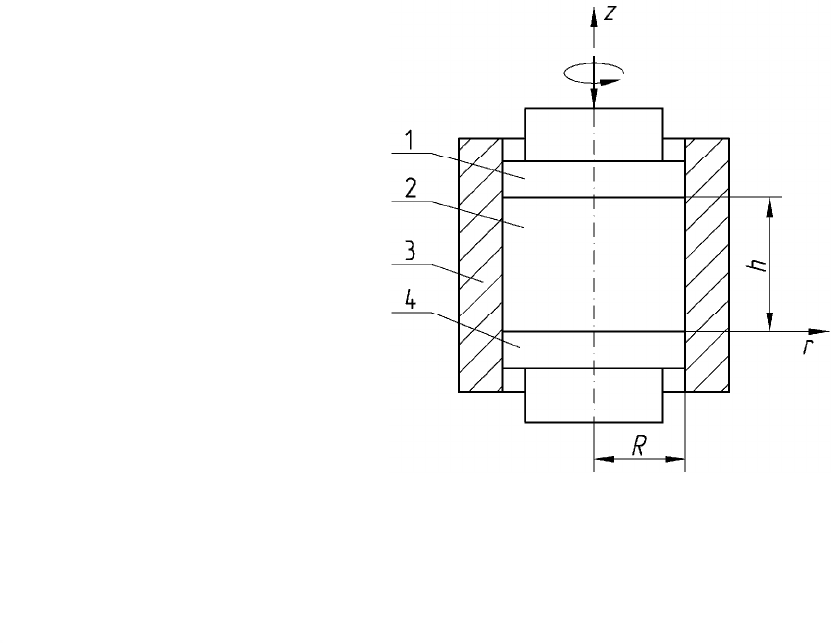
(рис. 41.1).
Рис. 41.1. Схема процесса скручивания заготовки в контейнере
206
Вращение пуансона 1 вызывает закручивание одной части заготовки 2,
помещенной в контейнер 3, по отношению к другой на определенный угол
вокруг общей оси. Нижний пуансон 4 жестко закреплен с контейнером.
Поскольку заготовка представляет собой тело вращения, выбираем
цилиндрическую систему координат.
Из трех составляющих скорости перемещения (ϑ
r
, ϑ
ϕ
, ϑ
z
) ненулевой в
рассматриваемом случае будет только тангенциальная ϑ
ϕ
, которую можно
задать в виде линейной функции координат r, z и угловой скорости вращения
пуансона ω:
h
z
rω=ϑ
ϕ
,
где h - высота заготовки.
Последняя формула удовлетворяет граничным условиям:
при r = 0, ϑ
ϕ
= 0 (частицы, расположенные на оси вращения заготовки,
в процессе скручивания не перемещаются);
при z = 0, ϑ
ϕ
= 0 (на контакте с нижним неподвижным пуансоном
частицы не перемещаются);
при z = h, ϑ
ϕ
= ωr (на контакте с верхним вращающимся пуансоном
реализуется полное прилипание).
Из шести кинематических соотношений, записанных в цилиндрической
системе координат, ненулевой будет составляющая
h
r
rz
z
z
ω
⋅=
∂ϕ
∂ϑ
⋅+
∂
∂ϑ
=ξ
ϕ
ϕ
2
11
2
1
.
В соответствии с формулой
( )
( ) ( )
[
]
(
)
222
222
4
3
2
ϕϕϕϕϕϕ
ξ+ξ+ξ+ξ−ξ+ξ−ξ+ξ−ξ=
rzrzrrzzzzrr
H

207
интенсивность скоростей деформации сдвига
h
r
H
ω
= .
Мощность формоизменения (деформации) при Т = τ
S
∫∫∫
ωτπ=ϕ
ω
τ=
π2
000
3
деф
3
2
ddd
hR
SS
Rzrr
h
r
N
.
Мощность, затрачиваемая на преодоление сил трения на стенке
контейнера (принимаем закон трения по Зибелю)
∫∫
ωπψτ=ϕ
=
ϑψτ=
π
ϕ
2
00
2
тр
dd
h
SS
hRzR
Rr
N
.
Тогда общая мощность, необходимая для осуществления скручивания,
ψ⋅⋅+ωτπ=+=
R
h
RNNN
S
2
3
1
3
2
3
трдеф
.
Энергетический метод положен в основу и так называемых
экстремальных принципов, составляющих сущность вариационных методов,
подробно изложенных в литературе.
В основе всех выводов лежит энергетическое тождество, которое
выражает тот факт, что алгебраическая сумма мощностей внутренних и
внешних сил равна нулю. Это можно выразить следующим образом:
(
)
[
]
∫∫∫ ∫∫
=
ϑ
−
ϑ
−
ω
ρ
+
ξ
σ
V F
iiiiiijij
FfVg 0dd
.
Объемный интеграл этого тождества определяет мощность всех
внутренних сил при пластической деформации, а поверхностный интеграл -
мощность всех поверхностных сил. Это уравнение показывает, что
действительная форма равновесия пластически деформируемого тела
отличается от всех других мыслимых форм тем, что сообщает полной
мощности минимальное значение.
208
Другим примером может служить задача определения общей
мощности, затрачиваемой для осуществления осадки цилиндрической
заготовки.
С учетом принимаемых граничных условий
0
0
=υ
=zz
; υ−=υ
=hzz
; 0
0
=υ
=rr
,
кинематические возможное поле скоростей можно задать в виде:
z
h
z
υ
−=υ ; r
h
r
υ
=υ
2
1
; υ
ϕ
= 0,
где υ - известная скорость перемещения верхнего бойка.
Компоненты тензора скорости деформации в цилиндрической системе
координат имеют следующий вид:
h
z
z
zz
υ
−=
∂
υ
∂
=ξ ;
h
r
r
rr
υ
=
∂
υ
∂
=ξ
2
1
;
hrr
r
υ
=
ϕ∂
υ
∂
+
υ
=ξ
ϕ
ϕϕ
2
11
;
ξ
ϕz
= ξ
rϕ
= ξ
rz
= 0.
Интенсивность скоростей деформации сдвига
( )
( )
( )
(
)
h
H
zrzrzzzzrrrr
υ
=ξ+ξ+ξ+ξ−ξ+ξ−ξ+ξ−ξ=
ϕϕϕϕϕϕ
36
3
2
222
222
.
Мощность деформации при условии, что Т = τ
S
, равна
∫∫∫ ∫∫∫
υτπ=ϕ
υ
τ==
τ
V
R h
SS
Rzrr
h
VTHN
0
2
00
2
д
3ddd3d .
Скорость скольжения металла по инструменту
r
h
hz
zr
υ
=υ=υ
=
=τ
2
1
0
.
209
При условии, что на поверхность контакта действует закон трения
Зибеля τ=ψτ
S
, мощность сил трения будет равна
∫∫
υ
∫
ψτ
∫
π=ϕ
υ
ψτ=τυ=
π
τ
F
R
SS
h
R
rr
h
FN
0
2
0
3
тр
3
2
dd
2
1
2d .
Подставляя обе составляющие в уравнение баланса мощностей
получим
ψ+υτπ=υψτπ+υτπ=
h
R
R
h
R
RN
SSS
3
2
3
3
2
3
2
3
2
.
Контрольные вопросы
1. Схема процесса скручивания заготовки в контейнере.
2. Последовательность процесса скручивания заготовки в контейнере.
3. Какая составляющая скорости перемещения будет нулевой?
4. При каком граничном условии на контакте с верхним вращающимся
пуансоном реализуется полное прилипание?
5. Как определяется мощность формоизменения при Т = τ
S
?
6. При каком граничном условии частицы, расположенные на оси вращения
заготовки, в процессе скручивания не перемещаются?
7. Какой вид имеют компоненты тензора скорости деформации в
цилиндрической системе координат?
ЛЕКЦИЯ 42
СУЩНОСТЬ МЕТОДА ЛИНИЙ СКОЛЬЖЕНИЯ
План лекции:
1. Сущность метода линий скольжения применительно к плоской
деформации несжимаемого идеально пластичного материала.
2. Дифференциальные уравнения линий скольжения.
3. Свойства линий скольжения.
Этот метод разработан для плоской деформации несжимаемого
идеально пластичного материала. Будем полагать, что деформации
210
протекают в плоскости x0y: σ
xx
, σ
yy
, σ
xy
определяют напряженное состояние,
а ϑ
x
, ϑ
y
- деформированное. Система уравнений теории пластичности,
соответствующая рассматриваемому случаю плоской деформации, была
составлена ранее (см. уравнения 37.1а - 37.1д). Метод линий скольжения
позволяет так преобразовать эти уравнения, чтобы отыскать решение для
любого практического случая плоской деформации.
Тензор напряжений для плоской деформации содержит четыре
существенных компоненты (при σ
xy
= σ
yx
):
σ
σσ
σ
σ
=
σ
zz
yyyx
xyxx
T
00
0
0
.
Для несжимаемого материала справедливо выражение
2
22
yyxx
zz
σ
+
σ
=σ=σ=σ .
Главные напряжения для плоской деформации могут быть найдены из
уравнения
λ
3
- I
1
λ
2
+I
2
λ - I
3
= 0,
где I
1
, I
2
, I
3
- соответственно, первый, второй и третий инварианты тензора
напряжений.
Его корни λ
1
, λ
2
, λ
3
и есть главные напряжения. Учитывая, что одно из
главных напряжений известно (σ
22
= σ
zz
), можно найти остальные
составляющие:
(
)
2
2
11
42
xy
yyxxyyxx
σ+
σ−σ
+
σ+σ
=σ
;
(
)
2
2
33
42
xy
yyxxyyxx
σ+
σ−σ
−
σ+σ
=σ
.