Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.


69 Problems
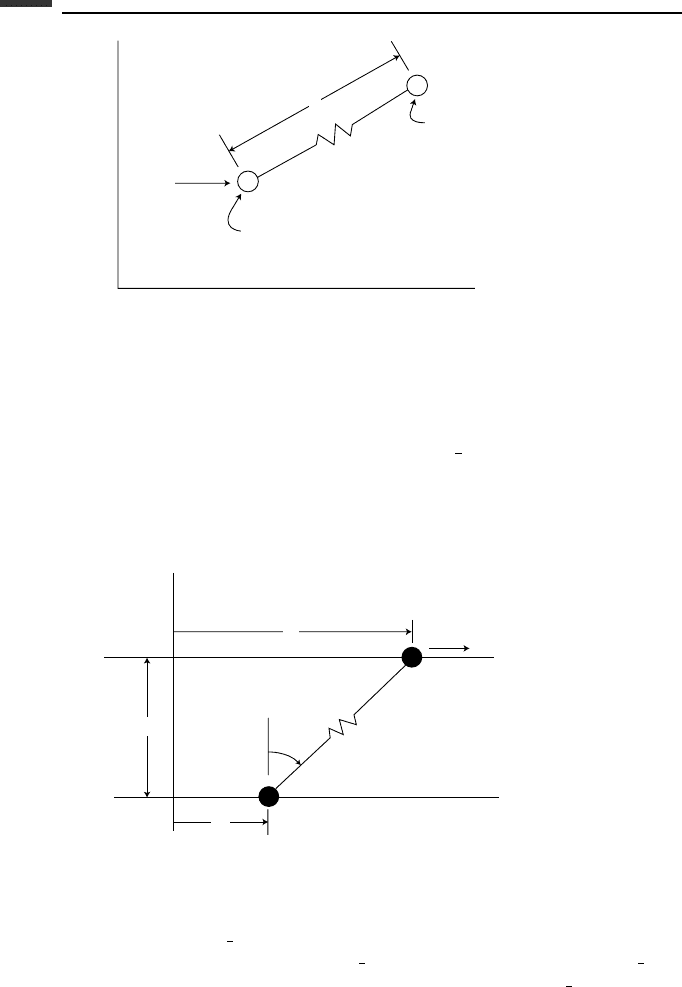
1.15. A massless disk of radius r has a particle of mass m attached at a distance l from its
center. The disk rolls without slipping on a horizontal floor. Then, for some position
angle θ, a horizontal impulse
ˆ
F is applied at the highest point A on the disk. Solve
for the change ω in angular velocity, as well as the constraint impulse components
ˆ
R
v
and
ˆ
R
h
.
^
^
^
R
v
R
h
x
P
m
l
θ
r
O
r
ω
A
y
F
Figure P 1.15.
1.16. Consider the system of Example 1.13 on page 55. Assume the same initial conditions
and the same applied impulse
ˆ
F. Now suppose that Coulomb friction is added for the
sliding of particle B relative to the floor. (a) Assuming a friction coefficient µ,solve
for the values of
˙
x and
˙
θ immediately after the impulse. (b) What is the minimum
value of µ such that there is no sliding?
1.17. Two particles, each of mass m, are connected by a massless cord of length
1
2
πr on
a fixed horizontal cylinder of radius r. There is a coefficient of friction µ for sliding
of the particles on the cylinder. (a) Obtain the equation of motion, assuming
˙
θ>0
and the particles remain in contact with the cylinder. (b) Solve for the tension P in
the cord as a function of θ. Assume that 0 ≤ θ ≤
1
2
π and 0 <µ<1.
m
m
2
1
g
r
r
θ
µ
Figure P 1.17.

70 Introduction to particle dynamics
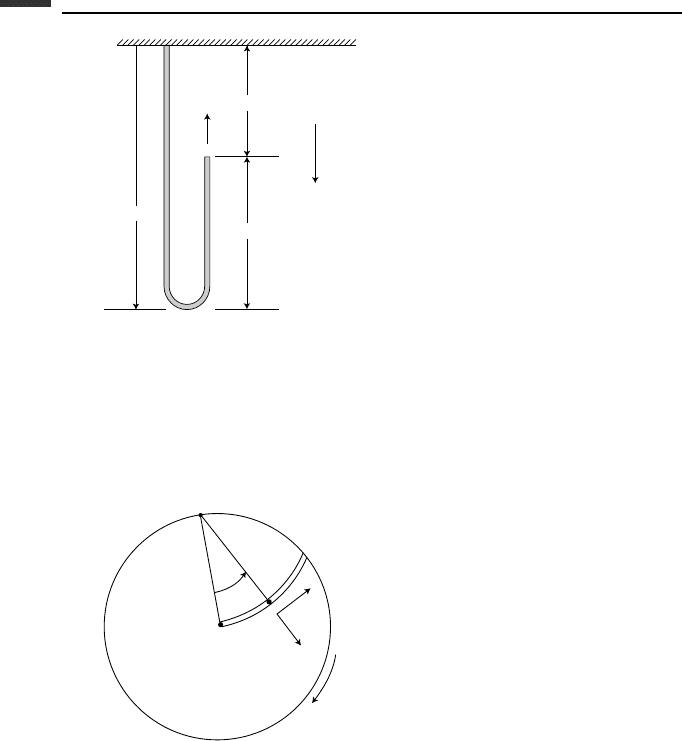
1.18. A particle P of mass m can slide without friction on a rigid fixed wire. It is connected
to a fixed point O through a linear damper with a damping coefficient c. Assuming
the initial conditions x(0) = 0,
˙
x(0) = v
0
, solve for the initial velocity v
0
which will
cause the particle to stop at x = h.
O
θ
c
m
P
h
x
Figure P 1.18.
1.19. Two particles, each of mass m, are connected by a rigid massless rod of length l. Parti-
cle 1 can slide without friction on a fixed straight wire. (a) Using (x,θ) as generalized
coordinates for motion in the horizontal plane, solve for
¨
x,
¨
θ, and P as functions
of (θ,
˙
θ) where P is the tensile force in the rod. (b) Assume the initial conditions
x(0) = 0,
˙
x(0) = 0,θ(0) = 0,
˙
θ(0) = v
0
/l. Solve for
˙
x and
˙
θ as functions of θ.
x
1
m
θ
2
m
l
Figure P 1.19.
1.20. Two particles, connected by a spring of stiffness k and unstressed length L, move in
the horizontal xy-plane. A force F in the x direction is applied to the first particle.
(a) Using (x
1
, y
1
, x
2
, y
2
) as coordinates, obtain the four differential equations of
motion. (b) Now introduce a constraint on the second particle given by x
2
= y
2
.
Eliminate y
2
and write equations of motion for x
1
, y
1
, and x
2
.
71 Problems
(x
1
, y
1
)
(x
2
, y
2
)
m
1
k
m
2
F
y
x
l
Figure P 1.20.
1.21. Two particles, each of mass m, can slide on smooth parallel fixed wires which are
separated by a distance h. The particles are connected by a linear spring of stiffness
k and unstressed length h. (a) Assume the initial conditions x
1
(0) = x
2
(0) = 0 and
˙
x
1
(0) =
˙
x
2
(0) = 0. At t = 0, a constant force F =
1
4
kh is applied to the first particle.
In the motion which follows, solve for the maximum value of θ . (b) Assume the
initial conditions θ (0) = θ
0
and
˙
θ(0) = 0. Find the value of θ such that it remains
constant during the motion.
m
θ
k
m
F
y
h
x
2
x
1
x
Figure P 1.21.
1.22. A flexible inextensible rope of uniform linear density ρ and length L is initially at
rest with y(0) =
1
3
L. (a) Find the differential equation for y in the following two
cases: (1) upward motion with F =
1
2
ρ Lg; (2) downward motion with F =
1
6
ρ Lg.
(b) Show that in each case the magnitude of the energy loss rate is
1
4
ρ|
˙
y|
3
.
72 Introduction to particle dynamics
x
F
g
L−x
y
Figure P 1.22.
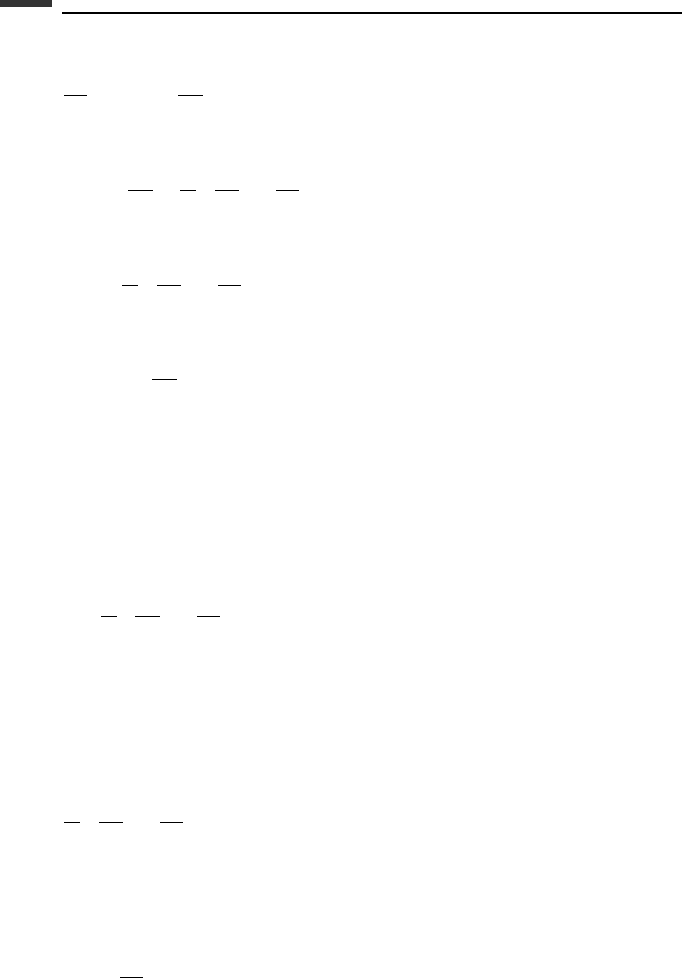
1.23. A particle P of mass m can slide without friction in a slot having the form of an arc of
radius r which is cut in a circular impeller that rotates with a constant angular velocity
ω
0
. (a) Write the differential equation of motion in terms of the relative position angle
θ. (b) Assuming that the particle is released from rest at θ = 0, find the value of
˙
θ as the
particle leaves the impeller. (c) What is the force on the particle just before it leaves?
O′
O
P
r
r
e
r
ω
0
e
θ
θ
Figure P 1.23.

2
Lagrange’s and Hamilton’s equations
In our study of the dynamics of a system of particles, we have been concerned primarily
with the Newtonian approach which is vectorial in nature. In general, we need to know
the magnitudes and directions of the forces acting on the system, including the forces of
constraint. Frequently the constraint forces are not known directly and must be included as
additional unknown variables in the equations of motion. Furthermore, the calculation of
particle accelerations can present kinematical difficulties.
An alternate approach is that of analytical dynamics, as represented by Lagrange’s equa-
tions and Hamilton’s equations. These methods enable one to obtain a complete set of
equations of motion by differentiations of a single scalar function, namely the Lagrangian
function or the Hamiltonian function. These functions include kinetic and potential ener-
gies, but ideal constraint forces are not involved. Thus, orderly procedures for obtaining the
equations of motion are available and are applicable to a wide range of problems.
2.1 D’Alembert’s principle and Lagrange’s equations
D’Alembert’s principle
Let us begin with Newton’s law of motion applied to a system of N particles. For the ith
particle of mass m
i
and inertial position r
i
,wehave
F
i
+ R
i
− m
i
¨r
i
= 0 (2.1)
where F
i
is the applied force and R
i
is the constraint force. Now take the scalar product
with a virtual displacement δr
i
and sum over i. We obtain
N
i=1
(
F
i
+ R
i
− m
i
¨r
i
)
· δr
i
= 0 (2.2)
This result is valid for arbitrary δrs; but now assume that the δrs satisfy the instantaneous
or virtual constraint equations, namely,
3N
i=1
a
ji
(x , t )δx
i
= 0(j = 1,...,m) (2.3)

74 Lagrange’s and Hamilton’s equations
where the δxs are the Cartesian components of the δrs. The virtual work of the constraint
forces must vanish, that is,
N
i=1
R
i
· δr
i
= 0 (2.4)
Then (2.2) reduces to
N
i=1
(
F
i
− m
i
¨r
i
)
· δr
i
= 0 (2.5)
This important result is the Lagrangian form of d’Alembert’s principle. It states that the
virtual work of the applied forces plus the inertia forces is zero for all virtual displacements
satisfying the instantaneous constraints, that is, with time held fixed. The forces due to ideal
constraints do not enter into these equations. This important characteristic will be reflected
in various dynamical equations derived using d’Alembert’s principle, including Lagrange’s
and Hamilton’s equations.
In terms of Cartesian coordinates, d’Alembert’s principle has the form
3N
k=1
(
F
k
− m
k
¨
x
k
)
δx
k
= 0 (2.6)
where the δxs satisfy (2.3). Equation (2.6) is valid for any set of δx s which satisfy the
instantaneous constraints. There are (3N − m) independent sets of δx s, each being conven-
iently expressed in terms of δx
k
ratios. This results in (3N − m) equations of motion. An
additional m equations are obtained by differentiating the constraint equations of (1.203)
or, in this case,
3N
i=1
a
ji
˙
x
i
+ a
jt
= 0(j = 1,...,m) (2.7)
with respect to time. Altogether, there are now 3N second-order differential equations which
can be solved, frequently by numerical integration, for the xs as functions of time. Note
that the constraint forces have been eliminated from the equations of motion.
Example 2.1 A particle of mass m can move without friction on the inside surface of a
paraboloid of revolution (Fig. 2.1)
φ = x
2
+ y
2
− z = 0 (2.8)
under the action of a uniform gravitational field in the negative z direction. We wish to
find the differential equations of motion using d’Alembert’s principle. The applied force
components are
F
x
= 0, F
y
= 0, F
z
=−mg (2.9)

75 D’Alembert’s principle and Lagrange’s equations
z
g
m
x
Figure 2.1.
In order to obtain the constraint equation for the virtual displacements, first write (2.8)
in the differential form
˙
φ = 2x
˙
x +2y
˙
y −
˙
z = 0 (2.10)
The instantaneous constraint equation, obtained using (2.3), is
2x δx +2yδy − δz = 0 (2.11)
We need to find 3N − m = 2 independent virtual displacements which satisfy (2.11). We
can take
δy = 0,δz = 2xδx (2.12)
and
δx = 0,δz = 2yδy (2.13)
Then d’Alembert’s principle, (2.6), results in
[
−m
¨
x −2mx(
¨
z + g)
]
δx = 0 (2.14)
[
−m
¨
y − 2my(
¨
z + g)
]
δy = 0 (2.15)
Now δx is freely variable in (2.14), as is δy in (2.15), so their coefficients must equal zero.
Thus, after dividing by −m, we obtain
¨
x +2x (
¨
z + g) = 0 (2.16)
¨
y + 2y(
¨
z + g) = 0 (2.17)
These are the dynamical equations of motion. A kinematical second-order equation is
obtained by differentiating (2.10) with respect to time, resulting in
2x
¨
x +2y
¨
y −
¨
z + 2
˙
x
2
+ 2
˙
y
2
= 0 (2.18)

76 Lagrange’s and Hamilton’s equations
Equations (2.16)–(2.18) can be solved for
¨
x,
¨
y and
¨
z, which are then integrated to give the
particle motion as a function of time.
Lagrange’s equations
Consider a system of N particles. Let us begin the derivation with d’Alembert’s principle
expressed in terms of Cartesian coordinates, that is,
3N
k=1
(
F
k
− m
k
¨
x
k
)
δx
k
= 0 (2.19)
The F
k
s are applied force components and the δxs are consistent with the instantaneous
constraints, as given in (2.3). We wish to transform to generalized coordinates. Recall that
δx
k
=
n
i=1
∂x
k
∂q
i
δq
i
(k = 1,...,3N ) (2.20)
Hence, we obtain
n
i=1
3N
k=1
F
k
∂x
k
∂q
i
− m
k
¨
x
k
∂x
k
∂q
i
δq
i
= 0 (2.21)
where the δqs conform to any constraints. But since x
k
= x
k
(q, t),
˙
x
k
=
n
i=1
∂x
k
∂q
i
˙
q
i
+
∂x
k
∂t
(2.22)
and we see that
∂
˙
x
k
∂
˙
q
i
=
∂x
k
∂q
i
(2.23)
Furthermore,
d
dt
∂x
k
∂q
i
=
n
j=1
∂
2
x
k
∂q
j
∂q
i
˙
q
j
+
∂
2
x
k
∂t ∂q
i
=
∂
˙
x
k
∂q
i
(2.24)
The kinetic energy of the system is
T =
1
2
3N
k=1
m
k
˙
x
2
k
(2.25)
and the generalized momentum p
i
is
p
i
=
∂T
∂
˙
q
i
=
3N
k=1
m
k
˙
x
k
∂
˙
x
k
∂
˙
q
i
=
3N
k=1
m
k
˙
x
k
∂x
k
∂q
i
(2.26)
Therefore, we obtain
d
dt
∂T
∂
˙
q
i
=
3N
k=1
m
k
¨
x
k
∂x
k
∂q
i
+
3N
k=1
m
k
˙
x
k
∂
˙
x
k
∂q
i
(2.27)
77 D’Alembert’s principle and Lagrange’s equations
However, from (2.25),
∂T
∂q
i
=
3N
k=1
m
k
˙
x
k
∂
˙
x
k
∂q
i
(2.28)
so we find that
3N
k=1
m
k
¨
x
k
∂x
k
∂q
i
=
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
(2.29)
This result is the negative of the generalized inertia force Q
∗
i
. In other words,
Q
∗
i
=−
d
dt
∂T
∂
˙
q
i
+
∂T
∂q
i
(2.30)
From (1.240), we recall that the generalized applied force is
Q
i
=
3N
k=1
F
k
∂x
k
∂q
i
(2.31)
Then d’Alembert’s principle, as written in (2.21) results in
n
i=1
(Q
i
+ Q
∗
i
)δq
i
= 0 (2.32)
for all δqs satisfying any constraints. Thus, the virtual work of the applied plus the inertial
generalized forces is equal to zero.
Using (2.30) and (2.31) with a change of sign, (2.32) takes the form
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
− Q
i
δq
i
= 0 (2.33)
where, again, the δqs satisfy the instantaneous constraints. This is d’Alembert’s principle
expressed in terms of generalized coordinates. We will call it Lagrange’s principle.Itapplies
to both holonomic and nonholonomic systems, requiring only that T and Q
i
be written as
functions of (q,
˙
q, t). Note that constraint forces do not enter the Q
i
s.
Now let us assume a holonomic system with independent generalized coordinates. Then
the coefficient of each δq
i
must be equal to zero. We obtain
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
= Q
i
(i = 1,...,n) (2.34)
This is the fundamental holonomic form of Lagrange’s equation. It results in n second-order
ordinary differential equations. The Qs are generalized applied forces from any source.
Let us make the further restriction that the Qs are derivable from a potential energy
function V (q, t ) in accordance with
Q
i
=−
∂V
∂q
i
(2.35)

78 Lagrange’s and Hamilton’s equations
Now define the Lagrangian function
L(q,
˙
q, t) = T (q,
˙
q, t) − V (q, t) (2.36)
Then we can write Lagrange’s equation in the standard holonomic form:
d
dt
∂ L
∂
˙
q
i
−
∂ L
∂q
i
= 0(i = 1,...,n) (2.37)
Equivalently, one can use
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
+
∂V
∂q
i
= 0(i = 1,...,n) (2.38)
If a portion of the applied generalized force is not obtained from a potential function, we
can write
Q
i
=−
∂V
∂q
i
+ Q
i
(2.39)
where Q
i
is the nonpotential part of Q
i
. Then we obtain Lagrange’s equation in the form
d
dt
∂ L
∂
˙
q
i
−
∂ L
∂q
i
= Q
i
(i = 1,...,n) (2.40)
or
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
=−
∂V
∂q
i
+ Q
i
(i = 1,...,n) (2.41)
The basic forms of Lagrange’s equations, given in (2.34) and (2.37) apply to holonomic
systems described in terms of independent generalized coordinates.
When one considers nonholonomic systems, there must be more generalized coordinates
than degrees of freedom. Hence, the generalized coordinates are not completely independent
and, as a result, there will be generalized constraint forces C
i
which are nonzero, in general.
In terms of the constraint forces acting on the individual particles, we have, similar to
(1.240),
C
i
=
N
j=1
R
j
· γ
ji
=
3N
k=1
R
k
∂x
k
∂q
i
(2.42)
where the R
k
are Cartesian constraint force components.
Let us use the Lagrange multiplier method to evaluate the generalized constraint forces.
First, we note that the virtual work of the constraint forces must equal zero, that is,
n
i=1
C
i
δq
i
= 0 (2.43)
provided that the δqs satisfy the instantaneous constraints in the form
n
i=1
a
ji
δq
i
= 0(j = 1,...,m) (2.44)