Malcolm Barnes. Practical Variable Speed Drives and Power Electronics
Подождите немного. Документ загружается.


viii Contents
)[XXKTZLKKJHGIQOTNOMNVKXLUXSGTIK\KIZUXJXO\KY
*)H[YI[XXKTZLKKJHGIQ
9VKKJLKKJHGIQLXUSZNKSUZUX
7 9KRKIZOUTUL')IUT\KXZKXY
/TZXUJ[IZOUT
:NKHGYOIYKRKIZOUTVXUIKJ[XK
:NKRUGJGHOROZ_ULIUT\KXZKXLKJYW[OXXKRIGMKSUZUXY
5VKXGZOUTOTZNKIUTYZGTZVU]KXXKMOUT
:NKTGZ[XKULZNKSGINOTKRUGJ
:NKRUGJZUXW[K
<GXOGHRKZUXW[KSGINOTKRUGJY
)UTYZGTZZUXW[KSGINOTKRUGJY
:NKYVKKJXGTMK
:NKOTKXZOGULZNKSGINOTKRUGJ
:NKXKW[OXKSKTZYLUXYZGXZOTM
:NKXKW[OXKSKTZYLUXYZUVVOTM
*)OTPKIZOUTHXGQOTM
3UZUXU\KXLR[^HXGQOTM
*_TGSOIHXGQOTM
8KMKTKXGZO\KHXGQOTM
)UTZXURULYVKKJZUXW[KGTJGII[XGI_
9KRKIZOTMZNKIUXXKIZYO`KULSUZUXGTJIUT\KXZKX
9[SSGX_ULZNKYKRKIZOUTVXUIKJ[XKY
9:+69VKIOL_ZNKOTOZOGRJGZGLUXZNKJXO\KGVVROIGZOUT
9:+69KRKIZOTMZNKT[SHKXULVURKYULZNKSUZUX
9:+69KRKIZOTMZNKSUZUXVU]KXXGZOTM
9:+69KRKIZGY[OZGHRKLXKW[KTI_IUT\KXZKX
9:+6,OTGRINKIQY
9:+6'TK^GSVRKULGYKRKIZOUTIGRI[RGZOUT
8 /TYZGRRGZOUTGTJIUSSOYYOUTOTM
-KTKXGROTYZGRRGZOUTGTJKT\OXUTSKTZGRXKW[OXKSKTZY
-KTKXGRYGLKZ_XKIUSSKTJGZOUTY
.G`GXJU[YGXKGY
+T\OXUTSKTZGRIUTJOZOUTYLUXOTYZGRRGZOUT
*KXGZOTMLUXNOMNZKSVKXGZ[XK
*KXGZOTMLUXNOMNGRZOZ[JK
6U]KXY[VVR_IUTTKIZOUTYGTJKGXZNOTMXKW[OXKSKTZY
6U]KXY[VVR_IGHRKY
)GHRKYHKZ]KKTIUT\KXZKXGTJSUZUX
)UTZXURIGHRKY
+GXZNOTMXKW[OXKSKTZY
)USSUTIGHROTMKXXUXY
Contents ix
9ZGXZYZUVIUTZXURUL')JXO\KY
/TYZGRROTM')IUT\KXZKXYOTZUSKZGRKTIRUY[XKY
)GRI[RGZOTMZNKJOSKTYOUTYULZNKKTIRUY[XK
<KTZORGZOUTULKTIRUY[XKY
'RZKXTGZO\KSU[TZOTMGXXGTMKSKTZY
)UTZXUR]OXOTMLUX\GXOGHRKYVKKJJXO\KY
.GXJ]OXKJIUTTKIZOUTYZU62)IUTZXURY_YZKSY
9KXOGRIUSS[TOIGZOUTY]OZN62)IUTZXURY_YZKSY
/TZKXLGIKIUT\KXZKXY
2UIGRGXKGTKZ]UXQY
)USSOYYOUTOTM\GXOGHRKYVKKJJXO\KY
:NKV[XVUYKULIUSSOYYOUTOTM
9KRKIZOTMZNKIUXXKIZGVVROIGZOUTYKZZOTMY
9KRKIZOTMZNKIUXXKIZVGXGSKZKXYKZZOTMY
9 9VKIOGRZUVOIYGTJTK]JK\KRUVSKTZY
9ULZY]OZINOTM
:NKSGZXO^IUT\KXZKX
Appendix A 3UZUXVXUZKIZOUTmJOXKIZZKSVKXGZ[XKYKTYOTM
Appendix B )[XXKTZSKGY[XKSKTZZXGTYJ[IKXY
Appendix C 9VKKJSKGY[XKSKTZZXGTYJ[IKXY
Appendix D /TZKXTGZOUTGRGTJTGZOUTGRYZGTJGXJY
Appendix E -RUYYGX_
Index

1
/TZXUJ[IZOUT
:NKTKKJLUX\GXOGHRKYVKKJJXO\KY
There are many and diverse reasons for using variable speed drives. Some applications,
such as paper making machines, cannot run without them while others, such as
centrifugal pumps, can benefit from energy savings.
In general, variable speed drives are used to:
• Match the speed of a drive to the process requirements
• Match the torque of a drive to the process requirements
• Save energy and improve efficiency
The needs for speed and torque control are usually fairly obvious. Modern electrical
VSDs can be used to accurately maintain the speed of a driven machine to within ±0.1%,
independent of load, compared to the speed regulation possible with a conventional fixed
speed squirrel cage induction motor, where the speed can vary by as much as 3% from no
load to full load.
The benefits of energy savings are not always fully appreciated by many users. These
savings are particularly apparent with centrifugal pumps and fans, where load torque
increases as the square of the speed and power consumption as the cube of the speed.
Substantial cost savings can be achieved in some applications.
An everyday example, which illustrates the benefits of variable speed control, is the
motorcar. It has become such an integral part of our lives that we seldom think about the
technology that it represents or that it is simply a variable speed platform. It is used here
to illustrate how variable speed drives are used to improve the speed, torque and energy
performance of a machine.
It is intuitively obvious that the speed of a motorcar must continuously be controlled by
the driver (the operator) to match the traffic conditions on the road (the process). In a city,
it is necessary to obey speed limits, avoid collisions and to start, accelerate, decelerate
and stop when required. On the open road, the main objective is to get to a destination
safely in the shortest time without exceeding the speed limit. The two main controls that
Practical Variable Speed Drives and Power Electronics
are used to control the speed are the accelerator, which controls the driving torque, and
the brake, which adjusts the load torque. A motorcar could not be safely operated in city
traffic or on the open road without these two controls. The driver must continuously
adjust the fuel input to the engine (the drive) to maintain a constant speed in spite of the
changes in the load, such as an uphill, downhill or strong wind conditions. On other
occasions he may have to use the brake to adjust the load and slow the vehicle down to
standstill.
Another important issue for most drivers is the cost of fuel or the cost of energy
consumption. The speed is controlled via the accelerator that controls the fuel input to the
engine. By adjusting the accelerator position, the energy consumption is kept to a
minimum and is matched to the speed and load conditions. Imagine the high fuel
consumption of a vehicle using a fixed accelerator setting and controlling the speed by
means of the brake position.
,[TJGSKTZGRVXOTIOVRKY
The following is a review of some of the fundamental principles associated with variable
speed drive applications.
• Forward direction
Forward direction refers to motion in one particular direction, which is chosen
by the user or designer as being the forward direction. The Forward direction
is designated as being positive (+ve). For example, the forward direction for a
motorcar is intuitively obvious from the design of the vehicle. Conveyor belts
and pumps also usually have a clearly identifiable forward direction.
• Reverse direction
Reverse direction refers to motion in the opposite direction. The Reverse
direction is designated as being negative (–ve). For example, the reverse
direction for a motor car is occasionally used for special situations such as
parking or un-parking the vehicle.
• Force
Motion is the result of applying one or more forces to an object. Motion takes
place in the direction in which the resultant force is applied. So force is a
combination of both magnitude and direction. A Force can be +ve or –ve
depending on the direction in which it is applied. A Force is said to be +ve if
it is applied in the forward direction and –ve if it is applied in the reverse
direction. In SI units, force is measured in Newtons.
• Linear velocity (v) or speed (n)
Linear velocity is the measure of the linear distance that a moving object
covers in a unit of time. It is the result of a linear force being applied to the
object. In SI units, this is usually measured in meters per second (m/sec).
Kilometers per hour (km/hr) is also a common unit of measurement. For
motion in the forward direction, velocity is designated Positive (+ve). For
motion in the reverse direction, velocity is designated Negative (–ve).
• Angular velocity (ω) or rotational speed (n)
Although a force is directional and results in linear motion, many industrial
applications are based on rotary motion. The rotational force associated with
rotating equipment is known as torque. Angular velocity is the result of the

Introduction
application of torque and is the angular rotation that a moving object covers in
a unit of time. In SI units, this is usually measured in radians per second
(rad/sec) or revolutions per second (rev/sec). When working with rotating
machines, these units are usually too small for practical use, so it is common
to measure rotational speed in revolutions per minute (rev/min).
• Torque
Torque is the product of the tangential force F, at the circumference of the
wheel, and the radius r to the center of the wheel. In SI units, torque is
measured in Newton-meters (Nm). A torque can be +ve or –ve depending on
the direction in which it is applied. A torque is said to be +ve if it is applied in
the forward direction of rotation and –ve if it is applied in the reverse
direction of rotation.
Using the motorcar as an example, Figure 1.1 illustrates the relationship between
direction, force, torque, linear speed and rotational speed. The petrol engine develops
rotational torque and transfers this via the transmission and axles to the driving wheels,
which convert torque (T) into a tangential force (F). No horizontal motion would take
place unless a resultant force is exerted horizontally along the surface of the road to
propel the vehicle in the forward direction. The higher the magnitude of this force, the
faster the car accelerates. In this example, the motion is designated as being forward, so
torque, speed, acceleration are all +ve.
Torque (Nm) = Tangential Force (N) × Radius (m)
Figure 1.1:
The relationship between torque, force and radius
• Linear acceleration (a)
Linear acceleration is the rate of change of linear velocity, usually in m/sec
2
.
Linear acceleration
m/sec
d
d
2
t
v
= a
− Linear acceleration is the increase in velocity in either direction
− Linear deceleration or braking is the decrease in velocity in either
direction
• Rotational acceleration (a)
Rotational acceleration is the rate of change of rotational velocity, usually in
rad/sec
2
.
Rotational acceleration
rad/sec
d
d
2
t
= a
ω
Practical Variable Speed Drives and Power Electronics
− Rotational acceleration is the increase in velocity in either direction
− Rotational deceleration or Braking is the decrease in velocity in either
direction
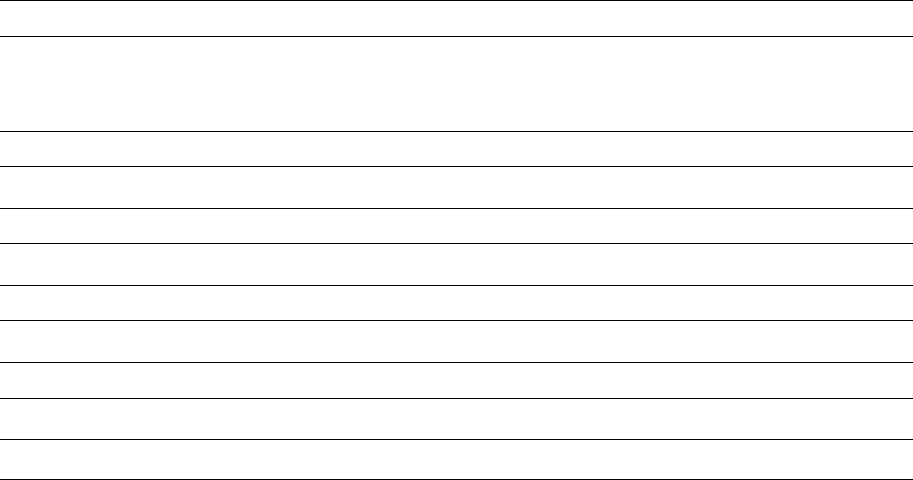
In the example in Figure 1.2, a motorcar sets off from standstill and accelerates in the
forward direction up to a velocity of 90 km/hr (25 m/sec) in a period of 10 sec.
In variable speed drive applications, this acceleration time is often called the ramp-up
time. After traveling at 90 km/hr for a while, the brakes are applied and the car
decelerates down to a velocity of 60 km/hr (16.7 m/sec) in 5 sec. In variable speed drive
applications, this deceleration time is often called the ramp-down time.
FORWARD DIRECTION
(a) Acceleration (b) Deceleration (braking)
5.2
10
0 25
12
+
−−
= =
t
v
v
= onAccelerati
= =
t
v
v
= onAccelerati
2
12
m/sec1.67
5
25 16.7
−
−−
Figure 1.2:
Acceleration and deceleration (braking) in the forward direction
Introduction
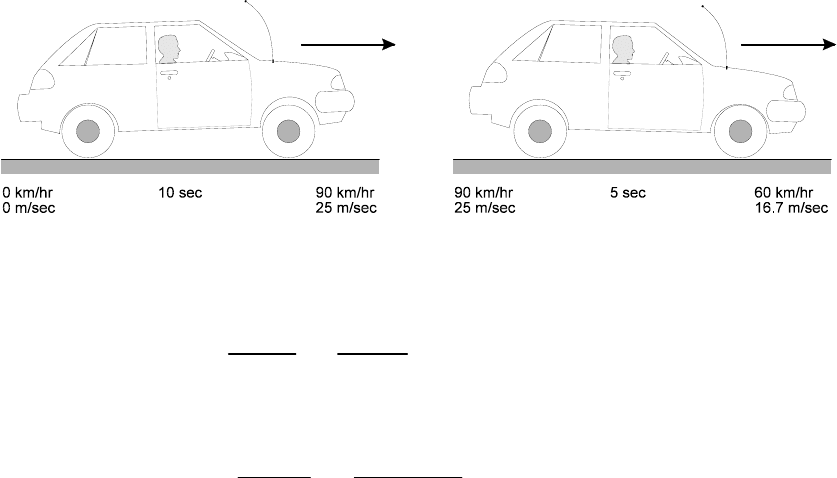
REVERSE DIRECTION
(a) Acceleration (b) Deceleration (braking)
2
12
m/sec
5
0 5.6
1.12
= =
t
v
v
onAccelerati
−
−−−
=
2
12
m/sec 2.8 +
2
5.6)( 0
= =
t
v
v
= onAccelerati
−−−
Figure 1.3:
Acceleration and deceleration (braking) in the reverse direction
From the example outlined in Figure 1.3, the acceleration time (ramp-up time) to
20 km/hr in the reverse direction is 5 secs. The braking period (ramp-down time) back to
standstill is 2 sec.
There are some additional terms and formulae that are commonly used in association
with variable speed drives and rotational motion.
• Power
Power is the rate at which work is being done by a machine. In SI units, it is
measured in watts. In practice, power is measured in kiloWatts (kW) or
MegaWatts (MW) because watts are such a small unit of measurement.
In rotating machines, power can be calculated as the product of torque and
speed. Consequently, when a rotating machine such as a motor car is at
standstill, the output power is zero. This does not mean that input power is
zero! Even at standstill with the engine running, there are a number of power
losses that manifest themselves as heat energy.
Using SI units, power and torque are related by the following very useful
formula, which is used extensively in VSD applications:
9550
(rev/min) (Nm)
(kW)
SpeedTorque
Power
×
=
Alternatively,
Practical Variable Speed Drives and Power Electronics
min)/rev(
(kW) 5509
(Nm)
Speed
Power
Torque
×
=
• Energy
Energy is the product of power and time and represents the rate at which work
is done over a period of time. In SI units it is usually measured as kiloWatt-
hours (kWh). In the example of the motorcar, the fuel consumed over a period
of time represents the energy consumed.
(h)(kW)(kWh) Time Power = Energy
×
• Moment of Inertia
Moment of inertia is that property of a rotating object that resists change in
rotational speed, either acceleration or deceleration. In SI units, moment of
inertia is measured in kgm
2
.
This means that, to accelerate a rotating object from speed n
1
(rev/min) to
speed n
2
(rev/min), an acceleration torque T
A
(Nm) must be provided by the
prime mover in addition to the mechanical load torque. The time t (sec)
required to change from one speed to another will depend on the moment of
inertia J (kgm
2
) of the rotating system, comprising both the drive and the
mechanical load. The acceleration torque will be:
)( t
)
n
n
(
J =
T
sec
(rev/m)
60
2
)
kgm
((Nm)
12
2
A
−
××
π
In applications where rotational motion is transformed into linear motion, for
example on a crane or a conveyor, the rotational speed (n) can be converted to
linear velocity (v) using the diameter (d) of the rotating drum as follows:
60
min(rev/
)sec(rev/ )sec(m/
) n d
= n d = v
π
π
therefore
)sec(
)sec(m/ 2
)
kgm
((Nm)
12
2
A
t
)
v
v
(
d
J =
T
−
××
From the above power, torque and energy formulae, there are four possible
combinations of acceleration/braking in either the forward/reverse directions that can be
applied to this type of linear motion. Therefore, the following conclusions can be drawn:
• 1st QUADRANT, torque is +ve and speed is +ve.
Power is positive in the sense that energy is transferred from the prime mover
(engine) to the mechanical load (wheels).
This is the case of the machine driving in the forward direction.
• 2nd QUADRANT, torque is –ve and speed is +ve.
Power is negative in the sense that energy is transferred from the wheels back
to the prime mover (engine). In the case of the motor car, this returned energy
is wasted as heat. In some types of electrical drives this energy can be
transferred back into the power supply system, called regenerative braking.
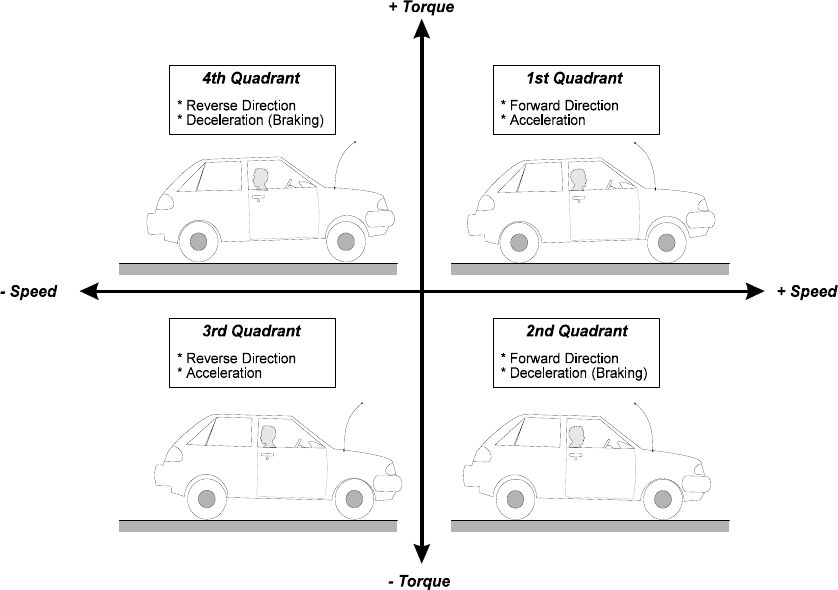
Introduction
This is the case of the machine braking in the forward direction.
• 3rd QUADRANT, torque is –ve and speed is –ve.
Power is positive in the sense that energy is transferred from the prime mover
(engine) to the mechanical load (wheels).
This is the case of the machine driving in the reverse direction.
• 4th QUADRANT, If torque is +ve and speed is –ve.
Power is negative in the sense that energy is transferred from the wheels back
to the prime mover (engine). As above, in some types of electrical drives this
power can be transferred back into the power supply system, called
regenerative braking.
This is the case of the machine braking in the reverse direction.
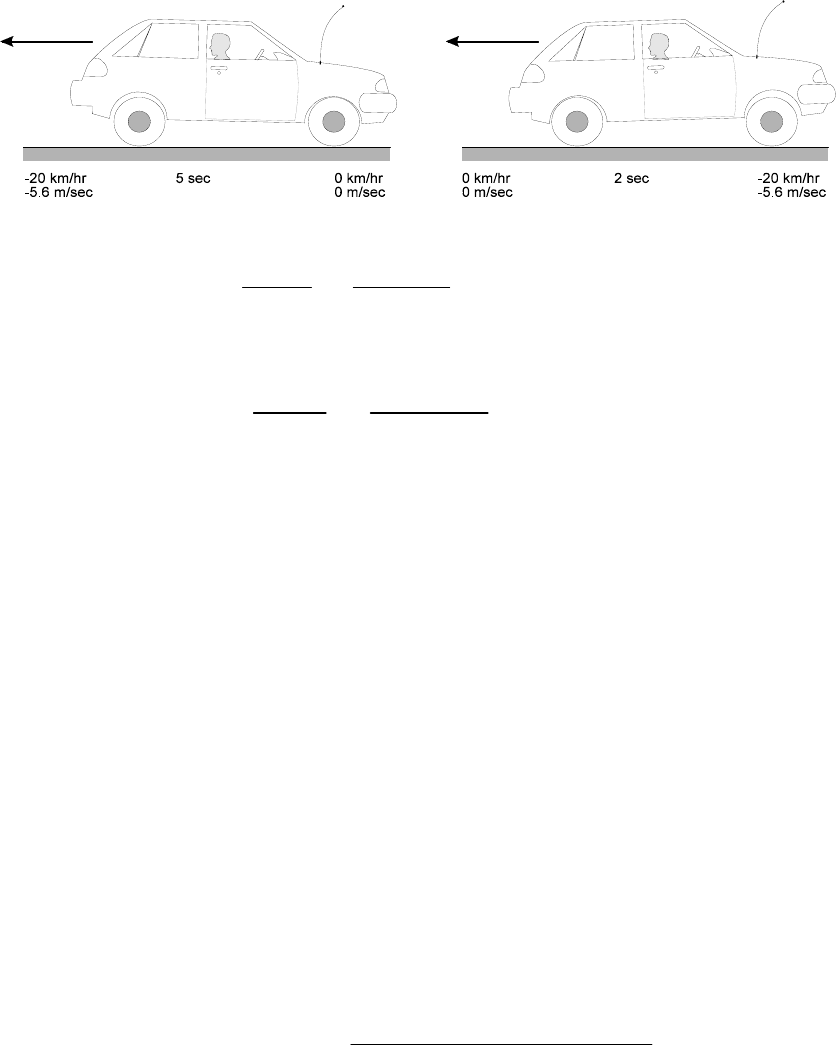
These 4 quadrants are summarized in Figure 1.4.
Figure 1.4:
The four quadrants of the torque-speed diagram for a motor car
:UXW[KYVKKJI[X\KYLUX\GXOGHRKYVKKJJXO\KY
In most variable speed drive applications torque, power, and speed are the most important
parameters. Curves, which plot torque against speed on a graph, are often used to
illustrate the performance of the VSD. The speed variable is usually plotted along one
axis and the torque variable along the other axis. Sometimes, power is also plotted along
the same axis as the torque. Since energy consumption is directly proportional to power,
energy depends on the product of torque and speed. For example, in a motorcar,
Practical Variable Speed Drives and Power Electronics
depressing the accelerator produces more torque that provides acceleration and results in
more speed, but more energy is required and more fuel is consumed.
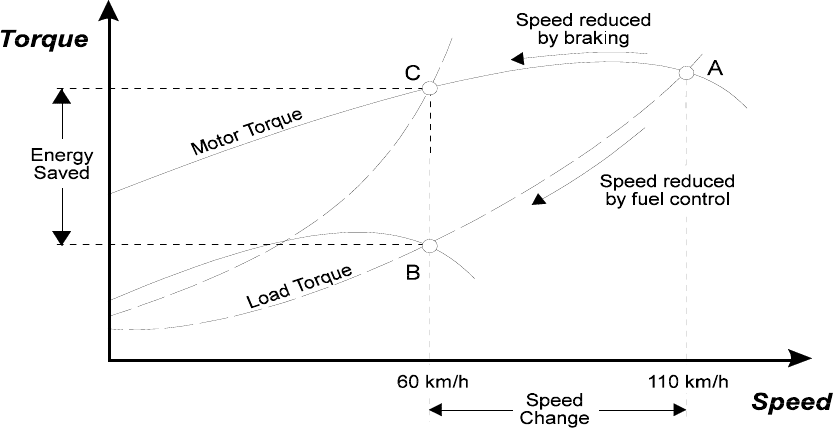
Again using the motorcar as an example of a variable speed drive, torque–speed curves
can be used to compare two alternative methods of speed control and to illustrate the
differences in energy consumption between the two strategies:
• Speed controlled by using drive control: adjusting the torque of the prime
mover. In practice, this is done by adjusting the fuel supplied to the engine,
using the accelerator for control, without using the brake. This is analogous to
using an electric variable speed drive to control the flow of water through a
centrifugal pump.
• Speed controlled by using load control: adjusting the overall torque of the
load. In practice, this could be done by keeping a fixed accelerator setting and
using the brakes for speed control. This is analogous to controlling the water
flow through a centrifugal pump by throttling the fluid upstream of the pump
to increase the head.
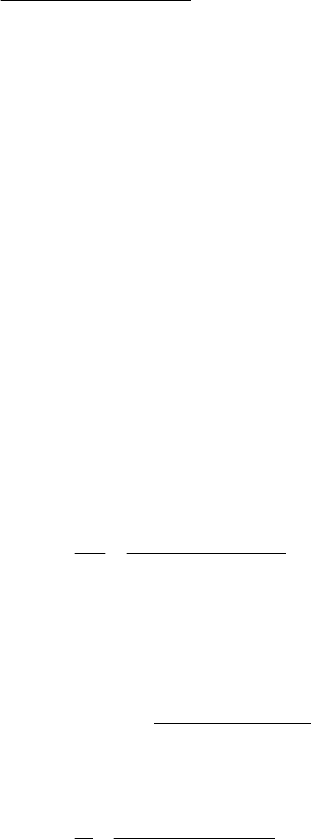
Using the motorcar as an example, the two solid curves in Figure 1.5 represent the drive
torque output of the engine over the speed range for two fuel control conditions:
• High fuel position – accelerator full down
• Lower fuel position – accelerator partially down
The two dashed curves in the Figure 1.5 represent the load torque changes over the
speed range for two mechanical load conditions. The mechanical load is mainly due to the
wind resistance and road friction, with the restraining torque of the brakes added.
• Wind & friction plus brake ON – high load torque
• Wind & friction plus brake OFF – low load torque
Figure 1.5:
Torque–speed curves for a motorcar