Malcolm Barnes. Practical Variable Speed Drives and Power Electronics
Подождите немного. Документ загружается.

Introduction
Theoretically, the eddy current coupling should be able to provide a full range of output
speeds and torques from zero up to just below the rated speed and torque of the motor,
allowing of course for slip. In practice, this is limited by the amount of torque that can be
transferred continuously through the coupling without generating excessive heat.
When stability is reached between the motor and the driven load connected by an Eddy
Current coupling, the output torque on the shaft is equal to the input torque from the AC
motor. However, the speeds of the input and output shafts will be different due to the slip.
Since power is a product of torque and speed, the difference between the input and output
power, the losses, appears as heat in the coupling. These losses are dissipated through
cooling fins on the rotating drums.
These losses may be calculated as follows:
kW
OI
)
P
P
( = Losses
−
kW
9550
21
)
n
n
( T
= Losses
−
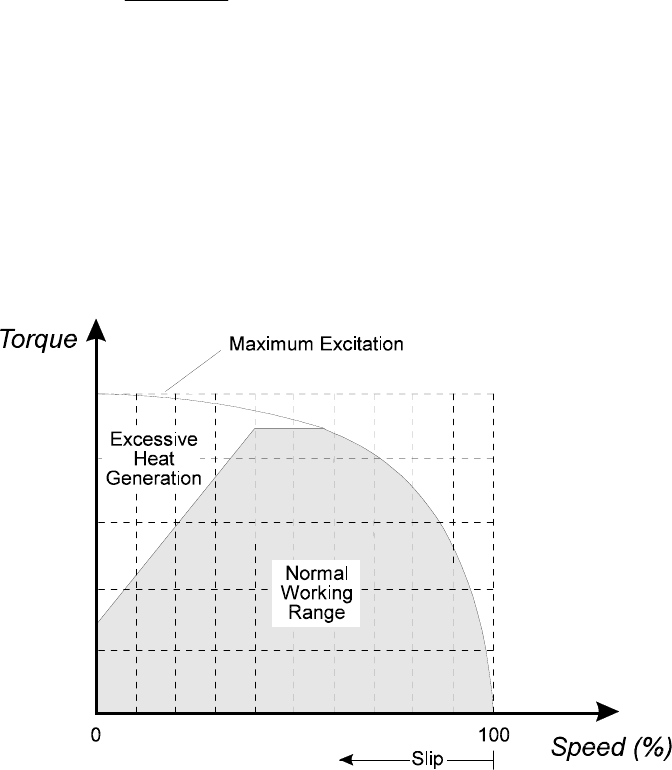
The worst case occurs at starting, with the full rated torque of the motor applied to the
driven load at zero output speed, the losses in the coupling are the full rated power of the
motor. Because of the difficulty of dissipating this amount of energy, in practice it is
necessary to limit the continuous torque at low speeds.
Alternatively, some additional cooling may be necessary for the coupling, but this
results in additional capital costs and low energy efficiency. In these cases, other types of
VSDs may be more suitable. Consequently, an eddy current coupling is most suited to
those types of driven load, which have a low torque at low speed, such as centrifugal
pumps and fans. The practical loadability of the eddy current coupling is shown in the
figure below.
Figure 1.12:
Loadability of the eddy current coupling
Practical Variable Speed Drives and Power Electronics
A major drawback of the eddy current coupling is its poor dynamic response. Its ability
to respond to step changes in the load or the speed setpoint depends on the time constants
associated with the highly inductive field coil, the eddy currents in the ferro-magnetic
drums and the type of control system used. The field coil time constant is the most
significant factor and there is very little that can be done to improve it, except possibly to
use a larger coupling. Closed loop speed control with tachometer feedback can also be
used to improve its performance. But there are many applications where the dynamic
response or output speed accuracy are not important issues and the eddy current coupling
has been proven to be a cost effective and reliable solution for these applications.
+RKIZXOIGR\GXOGHRKYVKKJJXO\KSKZNUJY
In contrast to the mechanical and hydraulic variable speed control methods, electrical
variable speed drives are those in which the speed of the electric motor itself, rather than
an intermediary device, is controlled. Variable speed drives that control the speed of DC
motors are loosely called DC variable speed drives or simply DC drives and those that
control the speed of AC motors are called AC variable speed drives or simply AC drives.
Almost all electrical VSDs are designed for operation from the standard 3-phase AC
power supply system.
Historically, two of the best known electrical VSDs were the schrage motor and the
Ward-Leonard system. Although these were both designed for operation from a 3-phase
AC power supply system, the former is an AC commutator motor while the latter uses a
DC generator and motor to effect speed control.
1.8.1 AC commutator motor – schrage motor
The schrage motor is an AC commutator motor having its primary winding on the rotor.
The speed was changed by controlling the position of the movable brushes by means of a
hand-wheel or a servo-motor. Although it was very popular in its time, this type of motor
is now too expensive to manufacture and maintain and is now seldom used.
1.8.2 Ward-Leonard system
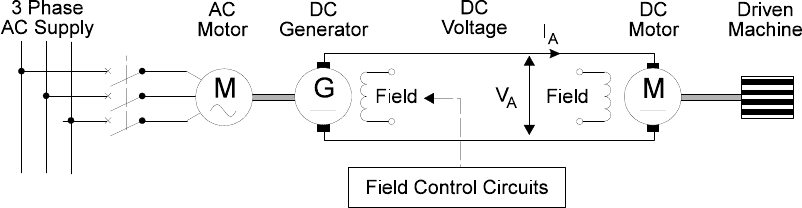
The Ward-Leonard system comprises a fixed speed 3-phase AC induction motor driving a
separately excited DC generator that, in turn, feeds a variable voltage to a shunt wound
DC motor. So this is essentially a DC variable speed drive.
Figure 1.13:
The Ward-Leonard system
DC drives have been used for variable speed applications for many decades and
historically were the first choice for speed control applications requiring accurate speed
control, controllable torque, reliability and simplicity. The basic principle of a DC
Introduction
variable speed drive is that the speed of a separately excited DC motor is directly
proportional to the voltage applied to the armature of the DC motor. The main changes
over the years have been concerned with the different methods of generating the variable
DC voltage from the 3-phase AC supply.
In the case of the Ward-Leonard system, the output voltage of the DC generator, which
is adjusted by controlling the field voltage, is used to control the speed of the DC motor
as shown in Figure 1.13. This type of variable speed drive had good speed and torque
characteristics and could achieve a speed range of 25:1. It was commonly used for winder
drives where torque control was important. It is no longer commonly used because of the
high cost of the 3 separate rotating machines. In addition, the system requires
considerable maintenance to keep the brushes and commutators of the two DC machines
in good condition.
In modern DC drives, the motor-generator set has been replaced by a thyristor
converter. The output DC voltage is controlled by adjusting the firing angle of the
thyristors connected in a bridge configuration connected directly to the AC power supply.
1.8.3 Electrical variable speed drives for DC motors (DC drives)
Since the 1970s, the controlled DC voltage required for DC motor speed control has been
more easily produced from the 3-phase AC supply using a static power electronic AC/DC
converter, or sometimes called a controlled rectifier. Because of its low cost and low
maintenance, this type of system has completely superseded the Ward-Leonard system.
There are several different configurations of the AC/DC converter, which may contain a
full-wave 12-pulse bridge, a full-wave 6-pulse bridge or a half-wave 3-pulse bridge. On
larger DC drive systems, 12-pulse bridges are often used.
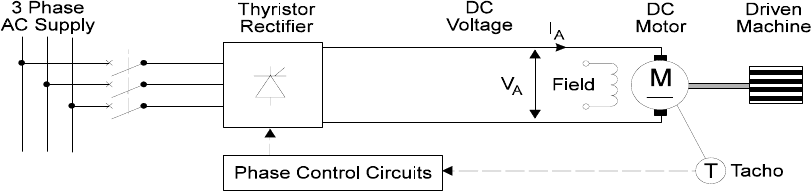
The most common type of AC/DC converter, which meets the steady state and dynamic
performance requirements of most VSD applications, comprises a 6-pulse thyristor
bridge, electronic control circuit and a DC motor as shown Figure 1.14. The 6-pulse
bridge produces less distortion on the DC side than the 3-pulse bridge and also results in
lower losses in the DC motor. On larger DC drive systems, 12-pulse bridges are often
used to reduce the harmonics in the AC power supply system.
The efficiency of an AC/DC converter is high, usually in excess of 98%. The overall
efficiency of the DC drive, including the motor, is lower and is typically about 90% at
full load depending on the size of the motor. The design and performance of power
electronic converters is described in detail in Chapter 3: Power electronic converters.
Figure 1.14:
Basic construction of a 6-pulse DC variable speed drive
AC/DC converters of this type are relatively simple and robust and can be built for
VSDs of up to several megaWatts with good control and performance characteristics.
Since the DC motor is relatively complex and expensive, the main disadvantage of this
type of VSD in comparison to an AC VSD, is the reliability of the DC motor. Although

Practical Variable Speed Drives and Power Electronics
the maintenance requirements of a DC motor are inherently higher than an AC induction
motor, provided that the correct brush grade is used for the speed and current rating, the
life of the commutator and brushgear can be quite long and maintenance minimal.
The fundamental principles of a DC variable speed drive, with a shunt wound DC
motor, are relatively easy to understand and are covered by a few simple equations as
follows:
• The armature voltage V
A
is the sum of the internal armature EMF V
E
and the
volt drop due to the armature current I
A
flow through the armature resistance
R
A
.
Armature Voltage
RI
+
V
=
V
AA
EA
• The DC motor speed is directly proportional to the armature back EMF V
E
and indirectly proportional to the field flux Φ, which in turn depends on the
field excitation current I
E
. Thus, the rotational speed of the motor can be
controlled by adjusting either the armature voltage, which controls V
E
, or the
field current, which controls the Φ.
Motor Speed
Φ
∝
V
n
E
• The output torque T of the motor is proportional to the product of the armature
current and the field flux.
Output Torque
Φ∝
I
T
A
• The direction of the torque and direction of rotation of the DC motor can be
reversed either by changing the polarity of Φ, called field reversal, or by
changing the polarity of I
A
, called armature current reversal. These can be
achieved by reversing the supply voltage connections to the field or to the
armature.
• The output power of the motor is proportional to the product of torque and
speed.
Output Power
n T P
∝
From these equations, the following can be deduced about a DC motor drive:
• The speed of a DC motor can be controlled by adjusting either the armature
voltage or the field flux or both. Usually the field flux is kept constant, so the
motor speed is increased by increasing the armature voltage.
• When the armature voltage V
A
has reached the maximum output of the
converter, additional increases in speed can be achieved by reducing the field
flux. This is known as the field weakening range. In the field weakening
range, the speed range is usually limited to about 3:1, mainly to ensure
stability and continued good commutation.
• The motor is able to develop its full torque over the normal speed range. Since
torque is not dependent on V
A
, the full-load torque output is possible over the
normal speed range, even at standstill (zero speed).
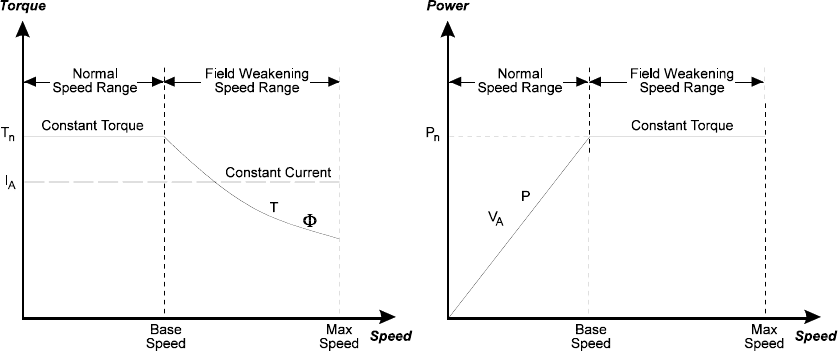
• The output power is zero at zero speed. In the normal speed range and at
constant torque, the output power increases in proportion to the speed.
Introduction
• In the field weakening range, the motor torque falls in proportion to the speed.
Consequently, the output power of the DC motor remains constant.
Figure 1.15:
Torque and power of a DC drive over the speed range
Although a DC machine is well suited for adjustable speed drive applications, there are
some limitations due to the mechanical commutator and brushes, which:
• Impose restrictions on the ambient conditions, such as temperature and
humidity
• Are subject to wear and require periodic maintenance
• Limit the maximum power and speed of machines that can be built
1.8.4 Electrical variable speed drives for AC motors (AC drives)
One of the lingering problems with thyristor controlled DC drives is the high maintenance
requirement of the DC motor. Since the 1980s, the popularity of AC variable speed drives
has grown rapidly, mainly due to advances in power electronics and digital control
technology affecting both the cost and performance of this type of VSD. The main
attraction of the AC VSDs is the rugged reliability and low cost of the squirrel cage AC
induction motor compared to the DC motor.
In the AC VSD, the mechanical commutation system of the DC motor, has been
replaced by a power electronic circuit called the inverter. However, the main difficulty
with the AC variable speed drive has always been the complexity, cost and reliability of
the AC frequency inverter circuit.
The development path from the Ward-Leonard system to the thyristor controlled DC
drive and then to the PWM-type AC variable voltage variable frequency converter is
illustrated in Figure 1.16. In the first step from (a) to (b), the high cost motor-generator
set has been replaced with a phase-controlled thyristor rectifier.
In the second step from (b) to (d), the high cost DC motor has been replaced with a
power electronic PWM inverter and a simple rugged AC induction motor. Also, the
rectifier is usually a simple diode rectifier.

Practical Variable Speed Drives and Power Electronics
Figure 1.16:
Main components of various types of variable speed drive:
(a) Ward-Leonard system
(b) Thyristor controlled DC drive
(c) Voltage source inverter (PAM) AC drive
(d) PWM voltage source (PWM) AC drive
Frequency control, as a method of changing the speed of AC motors, has been a well
known technique for decades, but it has only recently become a technically viable and
economical method of variable speed drive control. In the past, DC motors were used in
most variable speed drive applications in spite of the complexity, high cost and high
maintenance requirements of the DC motors. Even today, DC drives are still often used
for the more demanding variable speed drive applications. Examples of this are the

Introduction
sectional drives for paper machines, which require fast dynamic response and separate
control of speed and torque.
Developments in power electronics over the last 10 to 15 years has made it possible to
control not only the speed of AC induction motors but also the torque. Modern AC
variable speed drives, with flux-vector control, can now meet all the performance
requirements of even the most demanding applications.
In comparison to DC drives, AC drives have become a more cost effective method of
speed control for most variable speed drive applications up to 1000 kW. It is also the
technically preferred solution for many industrial environments where reliability and low
maintenance associated with the AC squirrel cage induction motor are important.
The fundamental principles of an AC variable speed drive are relatively easy to
understand and are covered by a few simple equations as follows:
• The speed (n) of the motor can be controlled either by adjusting the supply
frequency (f) or the number of poles (p). In an AC induction motor, the
synchronous speed, which is the speed at which the stator field rotates, is
governed by the simple formula:
Synchronous Speed
rev/min
120
S
p
f
n
=
Although there are special designs of induction motors, whose speed can be changed in
one or more steps by changing the number of poles, it is impractical to continuously vary
the number of poles to effect smooth speed control. Consequently, the fundamental
principle of modern AC variable speed drives is that the speed of a fixed pole AC
induction motor is proportional to the frequency of the AC voltage connected to it.
In practice, the actual speed of the rotor shaft is slower than the synchronous speed of
the rotating stator field, due to the slip between the stator field and the rotor. This is
covered in detail in Chapter 2: 3-Phase AC induction motors.
Actual speed n= (n
s
–slip) rev/min
The slip between the synchronous rotating field and the rotor depends on a number of
factors, being the stator voltage, the rotor current and the mechanical load on the shaft.
Consequently, the speed of an AC induction motor can also be adjusted by controlling the
slip of the rotor relative to the stator field. Slip control is discussed in Section 1.8.5.
Unlike a shunt wound DC motor, the stator field flux in an induction motor is also
derived from the supply voltage and the flux density in the air gap will be affected by
changes in the frequency of the supply voltage. The air-gap flux (Φ) of an AC induction
motor is directly proportional to the magnitude of the supply voltage (V) and inversely
proportional to the frequency (f).
Air-gap Flux
f
V
∝Φ
To maintain a constant field flux density in the metal parts during speed control, the
stator voltage must be adjusted in proportion to the frequency. If not and the flux density
is allowed to rise too high, saturation of the iron parts of the motor will result in high
excitation currents, which will cause excessive losses and heating. If the flux density is
allowed to fall too low, the output torque will drop and affect the performance of the AC
Practical Variable Speed Drives and Power Electronics
Drive. Air-gap flux density is dependent on both the frequency and the magnitude of the
supply voltage.
So the speed control of AC motors is complicated by the fact that both voltage and
frequency need to be controlled simultaneously, hence the name variable voltage, variable
frequency (VVVF) converter.
• In a similar way to the DC motor, the output torque of the AC motor depends
on the product of the air-gap flux density and the rotor current I
R
. So, to
maintain constant motor output torque, the flux density must be kept constant
which means that the ratio V/f must be kept constant.
Output Torque
Nm
R
I
T
Φ∝
• The direction of rotation of the AC motor can be reversed by changing the
firing sequence power electronic valves of the inverter stage. This is simply
done through the electronic control circuit.
• Output power of the AC motor is proportional to the product of torque and
speed.
Output Power
kW n T P
∝
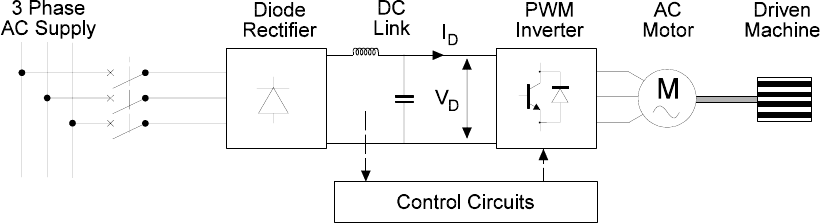
The basic construction of a modern AC frequency converter is shown in the figure
below.
Figure 1.17:
Main components of a typical PWM-type AC drive
The mains AC supply voltage is converted into a DC voltage and current through a
rectifier. The DC voltage and current are filtered to smooth out the peaks before being fed
into an inverter, where they are converted into a variable AC voltage and frequency. The
output voltage is controlled so that the ratio between voltage and frequency remains
constant to avoid over-fluxing the motor. The AC motor is able to provide its rated torque
over the speed range up to 50 Hz without a significant increase in losses.
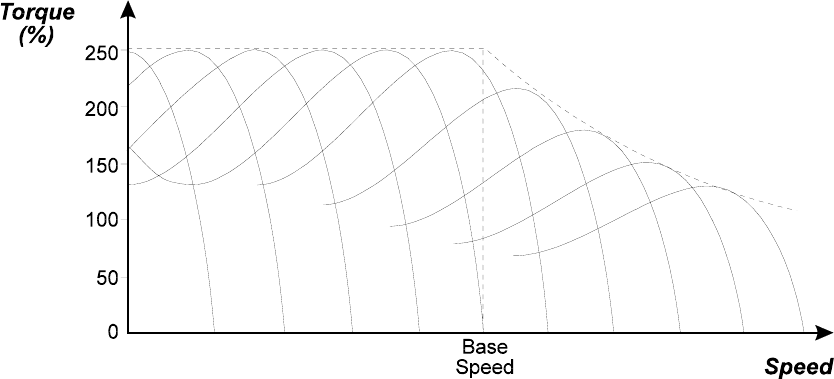
The motor can be run at speeds above rated frequency, but with reduced output torque.
Torque is reduced as a result of the reduction in the air-gap flux, which depends on the
V/f ratio. The locus of the induction motor torque–speed curves are at various frequencies
are shown in the figure below. At frequencies below 50 Hz, a constant torque output from
the motor is possible. At frequencies above the base frequency of 50 Hz, torque is
reduced in proportion to the reduction in speed.
Introduction
Figure 1.18:
Locus of the motor torque-speed curves at various frequencies
One of the main advantages of this VVVF speed control system is that, whilst the
controls are necessarily complex, the motors themselves can be of squirrel cage
construction, which is probably the most robust, and maintenance free form of electric
motor yet devised. This is particularly useful where the motors are mounted in hazardous
locations or in an inaccessible position, making routine cleaning and maintenance
difficult. Where a machine needs to be built into a flameproof, or even waterproof
enclosure, this can be done more cheaply with a squirrel cage AC induction motor than
for a DC motor.
On the other hand, an additional problem with standard AC squirrel cage motors, when
used for variable speed applications, is that they are cooled by means of a shaft mounted
fan. At low speeds, cooling is reduced, which affects the loadability of the drive. The
continuous output torque of the drive must be derated for lower speeds, unless a
separately powered auxiliary fan is used to cool the motor. This is similar to the cooling
requirements of DC motors, which require a separately powered auxiliary cooling fan.
From the equations above, the following deductions can be made about an AC drive:
• The speed of an AC induction motor can be controlled by adjusting the
frequency and magnitude of the stator voltage. Motor speed is proportional to
frequency, but the voltage must be simultaneously adjusted to avoid over-
fluxing the motor.
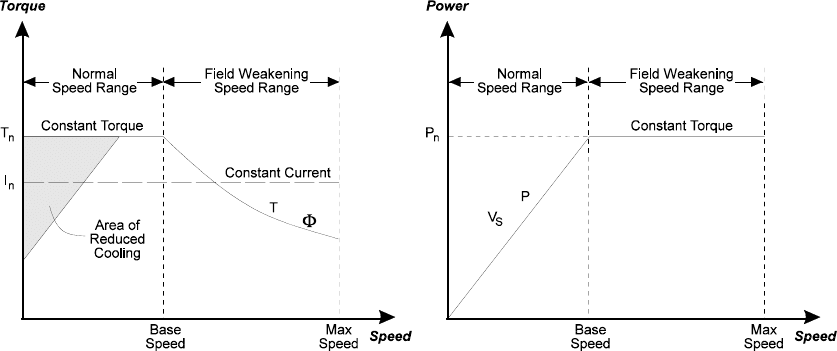
• The AC motor is able to develop its full torque over the normal speed range,
provided that the flux is held constant, (V/f ratio kept constant). A standard
AC motor reaches its rated speed, when the frequency has been increased to
rated frequency (50 Hz) and stator voltage V has reached its rated magnitude.
• The speed of an AC induction motor can be increased above its nominal 50
Hz rating, but the V/f ratio will fall because the stator voltage cannot be
increased any further. This results in a fall of the air-gap flux and a reduction
in output torque. As with the DC motor, this is known as the field weakening
range. The performance of the AC motor in the field weakening range is
similar to that of the DC motor and is characterized by constant power,
reduced torque.
Practical Variable Speed Drives and Power Electronics
• The output power is zero at zero speed. In the normal speed range and at
constant torque, the output power increases in proportion to the speed.
• In the field weakening range, the motor torque falls in proportion to the speed
and the output power of the AC motor remains constant.
Figure 1.19:
Torque and power of an AC drive over the speed range
1.8.5 Slip control AC variable speed drives
When an AC induction motor is started direct-on-line (DOL), the electrical power supply
system experiences a current surge which can be anywhere between 4 to 10 times the
rated current of the motor. The level of inrush current depends on the design of the motor
and is independent of the mechanical load connected to the motor. A standard squirrel
cage induction motor has an inrush current typically of 6 times the rated current of the
motor. The starting torque, associated with the inrush current, is typically between 1.5 to
2.5 times the rated torque of the motor. When the rotor is stationary, the slip is 100% and
the speed is zero. As the motor accelerates, the slip decreases and the speed eventually
stabilizes at the point where the motor output torque equals the mechanical load torque, as
illustrated in Figures 1.20 and 1.22.
The basic design of a squirrel cage induction motor (SCIM) and a wound rotor
induction motor (WRIM) are very similar, the main difference being the design and
construction of the rotor. The design and performance of AC induction motors is
described in considerable detail in Chapter 2: 3-Phase AC induction motors. In AC
induction motors, the slip between the synchronous rotating stator field and the rotor is
mainly dependent on the following two factors, either of which can be used to control the
motor speed:
• Stator voltage: Affects both the flux and the rotor current.
• Rotor current: For a SCIM, this depends on the rotor design.
For a WRIM, this depends on the external rotor connections