Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

I 'lO
8.
Static
Converter as a Power
Actuator
for
DC
Drives
io
iTtt
S1
(x-----,.
-L
U
o
iT4
I
I
S2
1
I
!e
-L
r r
A
i1
1
2
13
t
~r ~r
O
II
RO
1II.J
1.
U
1
! U
2
! U
3
!
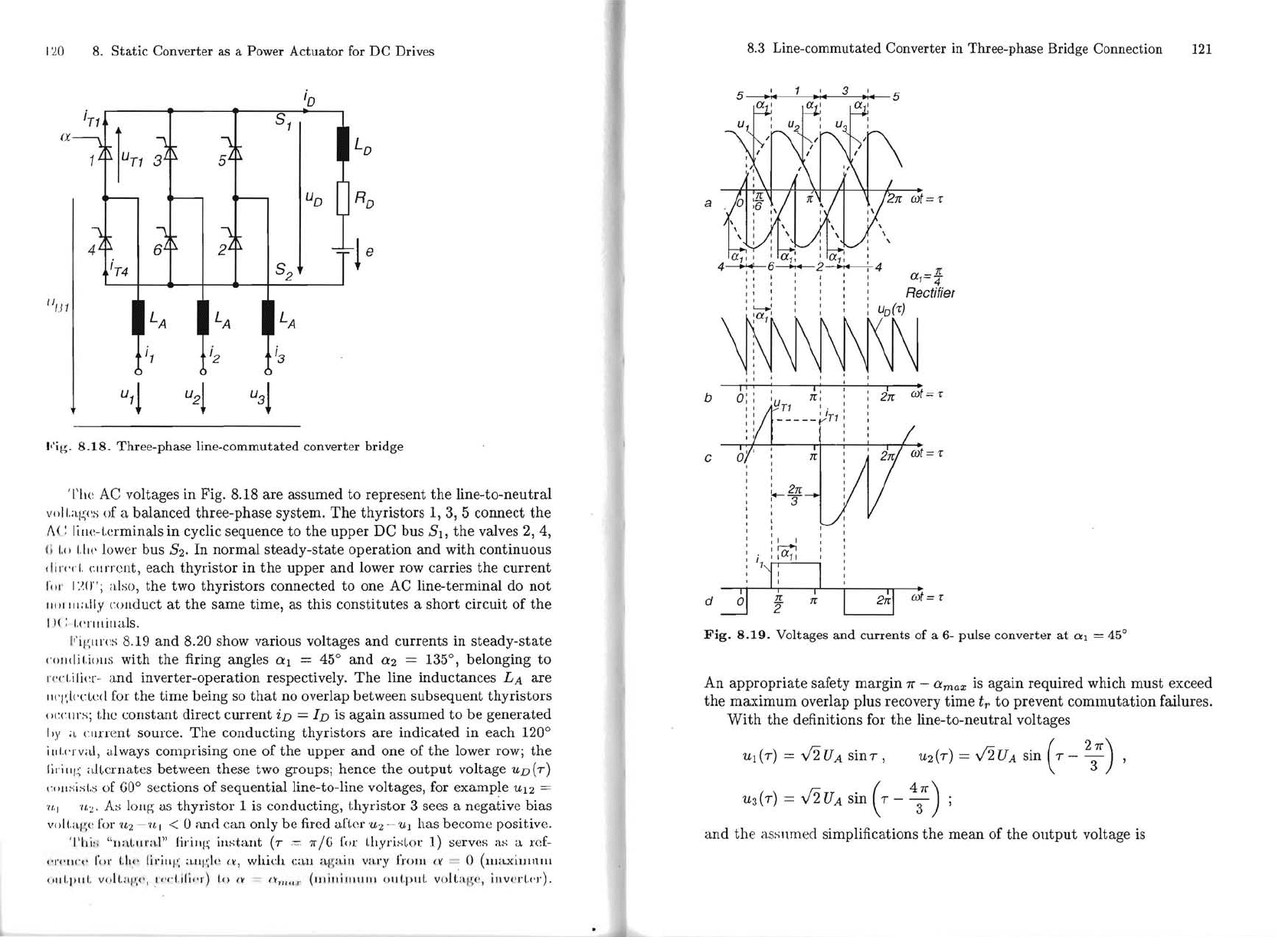
Fig.
8.18.
Three-phase
line-commutated
converter bridge
'!'ltc AC voltages
in
Fig. 8.18
are
assumed
to
represent
the
line-to-neutral
vI)IL:I./.o;(~
s
of
a
balanced
three-phase
system.
The
thyristors
1, 3, 5
connect
the
i\
C lillc-I,crminals
in
cyclic sequence
to
the
upper
DC
bus
SI,
the
valves
2,4,
1\
LI)
!.II(' lower
bus
S2.
In
normal
steady-state
operation
and
with
continuous
dl
",
·(
1.
clllTcnt, each
thyristor
in
the
upper
and
lower row carries
the
current
!'",
I:!()"; a]so,
the
two
thyristors
connected
to
one AC
line-terminal
do
not
IIClIlllally collduct
at
the
sarne
time,
as
this
constitutes
a
short
circuit
of
the
I
li:
I.I'rlllillals.
Figures 8.19
and
8.20 show various volt ages
and
currents
in
steady-state
('()lIdil.i()llS
with
the
firing angles
aI
= 45°
and
a2
= 135° , belonging
to
r('
r
Lili(~r-
and
inverter-operation
respectively.
The
line
inductances
LA
are
11(
'
I',II
'
cLcd
for
the
time
being
so
that
no overlap
between
subsequent
thyristors
oCCIlr
s;
thc
constant
direct
current
iD
=
ID
is
again
assumed
to
be
generated
I,)'
:l
c
l1rr
e
nt
source.
The
conducting
thyristors
are
indicated
in
each 120°
illl
.
<'rval
, always comprising
one
of
the
upper
and
one
of
the
lower row;
the
Jirilll
~
aHcrnates between
these
two
groups; hence
the
output
volt age uD(r)
C(
'lI
s
is1.s
of
(i0
° sections of
sequentialline-to-lin
e voltages, for
example
UI2
=
'If, I
'/I.
~
.
As IOllg as
thyristor
1 is c
onductin
g,
thyristor
3 sees a negative bias
v()lt.
agc
1<>1'
'lt2
-
'U
I < O
ano
ca
n only
be
fircd
art
e
!'
'U 2 - '
UI
has
bec
om
e positive.
'I'hi
::
"lla(.l1l'a!" ('
irillf.!,'
ins
tant
(r
~
.
n/O for
Lltyr
i
sl
or
1)
serves as a ref-
(')'(
' 111'(' r(
)(
·
1.11.1'
lirillP;
;\.IIJ
-\
II
~
(
~
,
which
ca
u ag
:l.ill
v
n.
ry
fr<1I1l
(Y =O (lllilx
illll1111
(1111.1'11
'
1.
v"It.
II,
I'
:c', ,
I,
·,·t.lfi(·r)
L"
rr
(
~""
I.
"
(lI
dllillllllll
1111
Lp
11
I.
VOJt
I I
,
I~
(
' 1
illv<'rl,l'r),
8.3
Line-commutated
Converter
in
Three-phase
Bridge Connection
121
a
O::
i
I
~I
I·
5
5
, ,
I i
b
::
A!!T1 : . '
27r
wt ='t'
/1 I I I
-----v
T1
:
7r
c
, 2n
,
~3
,
,I
I
I r::-+l
i I
,a
11
:
IJi
II
I.
d 3
~
2nl
wt =n T
Fig.
8.19.
Voltages
and
currents
of
a
6-
pulse conve
rter
at
ai
=
45
°
An
appropriate
safety ma
rgin
7r
- ama:>: is
again
required
which
must
exceed
the
maximum
overlap plus recovery
time
tr
to
prevent
commutation
failures.
With
the
definitions for
the
line-to-neutral
voltages
uI(r)
= V2UA
sinr
1
U2(r)
=
V2U
A
sin
(r
- 2
7r)
,
3
7r
u3(r) =
V2U
A
sin
(r
-
43
) j
a
nd
the
ass
nm
ed simplifications
the
mean
of
the
output
voltage is

122
8.
Static
Converter
as a Power
Actuator
for
DC
Drives
,I
L)
(;
,/
3
Iii
, .
I
II
I
1/
_.-:
-1- -
-7
--
r
TI
,
,
:TC
rr_-
3TC
-",-
4
Inverter
Uo(1:)
wt
=
1:
wt
=
1:
I".r:· )·I.:lO.
Voltag
es
and
currents
of
a 6- pulse
converter
at
0<1 = 135
0
~+a
f+a
3 /
3V6
/
'Ir
II./i
~
-
(Ul-u2)dr=--UA
sin(r+-)dr
'Ir
'Ir
6
~+Q
i+
a
3V6
('Ir)li+a
3V6
=
--
UA
cos r + - =
--
UA
coso: =
UDO
coso:.
'Ir 6
f+a
'Ir
(8.31)
l\cr('
I.on,
lhe
control curve follows a cos-function.
When
the
converter
is
('
IIII
I
...
rl.ed to the 230/400 V three-phase line,
the
maximum
mean
output
voll,;W;(~
ii->
(1)O
=540 V.
'I'IU'
olltput
voltal~e
'uJ)(r) in Figs. 8.19 and 8.20 contains harmoncis,
thc
rn'<[I
'
H'lIfiC'
:-l
(II'
wlti
c.
h
aJ'(~
lIlultiplcs
of
G/,
i.ç. :\00
Ilz
rOl'
a
50'
R,z
Iinc~.
V
..
II.:q',
e'
1\11
<1
('IIITe'ul.
(Ir
ii. I.hyriH(.or l
U'C'
pllll.l\'<1 1
11
Jo'i,
ç. R.
H)
('
fOI'
)·(·('I.ifier-
' U
<l
1
,1
I"
i". K
~ O
e'
1'111"
I
lIve'r!.!'I
'
o\,,'rnU(III
.
11"v"
'
I'
t1
(' Itlnll
v
"II
,
I\
I
~
(
'
('11'1'1
O)
8.3
Line-commutated
Converter
in
Three-phase
Bridge
Connection
123
dominates in
the
first, forward blocking voltage (UTl >
O)
in
the
second
case.
This
indicates
that
rectifier
operation
is
insensitive
to
overload, while
at
the
inverter limit
the
danger of
commutation
failure always lurks
in
the
background, because negative voltage
is
required across
the
outgoing
thyristor
for a sufficient
time
to
let
it
recover its forward blocking capability.
ln
Figs. 8.19 d
and
8.20 d
the
current
ii
in
one of
the
AC terminaIs
is
drawn,
the
fundamental component of which is again lagging
the
pertinent
line-to-neutral voltage
Ui
by
the
firing angle
o:
(neglecting overlap). A com-
parison
with
Fig. 8.6 d shows
that
the
harmonics content of
the
line
currents
is
reduced; whereas all
odd
harmonics of line frequency I were present in
the
single-phase circuit, there are additionally no
odd
harmonics of frequency
31
in
the
three-phase circuito Rence
the
lowest order harmonics of
the
line
currents, assuming perfect
symmetry
of
line volt ages
and
firing sequence, are
the
5th
and
the
7th in
the
three-phase circuito
80 far,
it
had
again been assumed
that
the
commutation
between
the
conducting
thyristors
occurs instantaneously;
in
reality,
it
requires finite
time
because of
the
presence of leakage inductances in
the
supply lines
and
the
thyristor
branches. As mentioned before, line inductances are often intro-
duced deliberately
to
limit
the
rise of
the
current
during commutation;
if
no
transformer
for supplying
the
converter is used, this
is
mandatory. Again
the
line impedance
is
assumed
to
be purely inductive,
RA
« WLA.
iO
io
io
SI
_
fi
•
i
5~
5
I
TS
,'l
iT1
T5
TI
,----,
L,
Iu
o
U
o
U
o
j
II
6
6
..
IT6
~
.
lO
io
1"8,
,
LA LA
LA
LA
i I
i3
iI
i3
i
2
i
2
T2
6
UI!
U
2
!
u
3
!
UI!
U
2
!
U
2
! U
3
!
-
a b
c
Fig.
8.21.
Sequence
of
commutation
in
three-phase
converter
bridge
Th('
COllllIIlIl.al.ion
dcscribed
in
Fig. 8.21 proceeds in three stages: lnitially
the tltyriHl.ors
ri
aliei GlIlay carry the consta.nt current
iD
=
lD
(Fig. 8.21 a);
nl.
I.illll'
I
;
~
I "
1.I1'y
f'
isl.or
I.
is
firec]
1I\lI,(Ii)lf~
to
ti\('
Ritllation
in
Fig
. 8.21 b,
I~!J
8.
Static
Converter as a Power
Actuator
for
DC
Drives
wlwre
two AC terminaIs
are
connected
through
thyristors
1
and
5; due
to
the
~:lIlall
inductances
LA
a
short
circuit
current
rapidly
builds up,
transferring
U
J(
~
current
ID
from
thyristor
5
to
thyristor
1.
As soon as
iT5
has
become
'I,
n u,
thyristor
5 blocks
and
the
circuit finds itself in
the
position
shown in
"'i
g.
8.21
c.
The
overlap
during
which
three
thyristors
are simultaneously
('olt<lucting
extends
normally
over a few degrees only; however
there
may
be
"~
:cc
ptions
if
the
line
inductances
are unusually large.
Th
e
commutation
according
to
Fig.8.21 b is described by
the
following
('<JllaLions,
valid for
~
+ a
~
T
~
~
+ a +
Tc,
'i'f'l +
iT5
=
iT6
~
ID ,
(8.32)
d
w L A
dT
(in
-
iT5)
~
UI
-
U3
.
(8.33)
1':lilJlillation
of
iT5
results in
din
;;:.
2wLA
~
~
UI
-
U3
=
V6UA
sm(T
-7r/6),
(8.34)
1(':ldÍlIg
with
the
initial
condition
in(~
+
a)
= O
to
v'6U
A
[
(7r)]
/'f'
I(r)
~
-
--
cos a - cos r - - ,
(8.35)
2wL
A
6
:1.11<1
/'
,/"
( / )
~
J
J)
-
in
(r)
.
(8.36)
iI :,
::
0"11
:IS
'/''/'I> i
!)
zero,
'Il )
'/'/'Io
(
Ij 'I'
ü+rc
=0,
(8.37)
ii",
('
1I11111l11tatiOll
is
concluded
and
Eqs.(8.32), (8.33)
are
no longe r valido
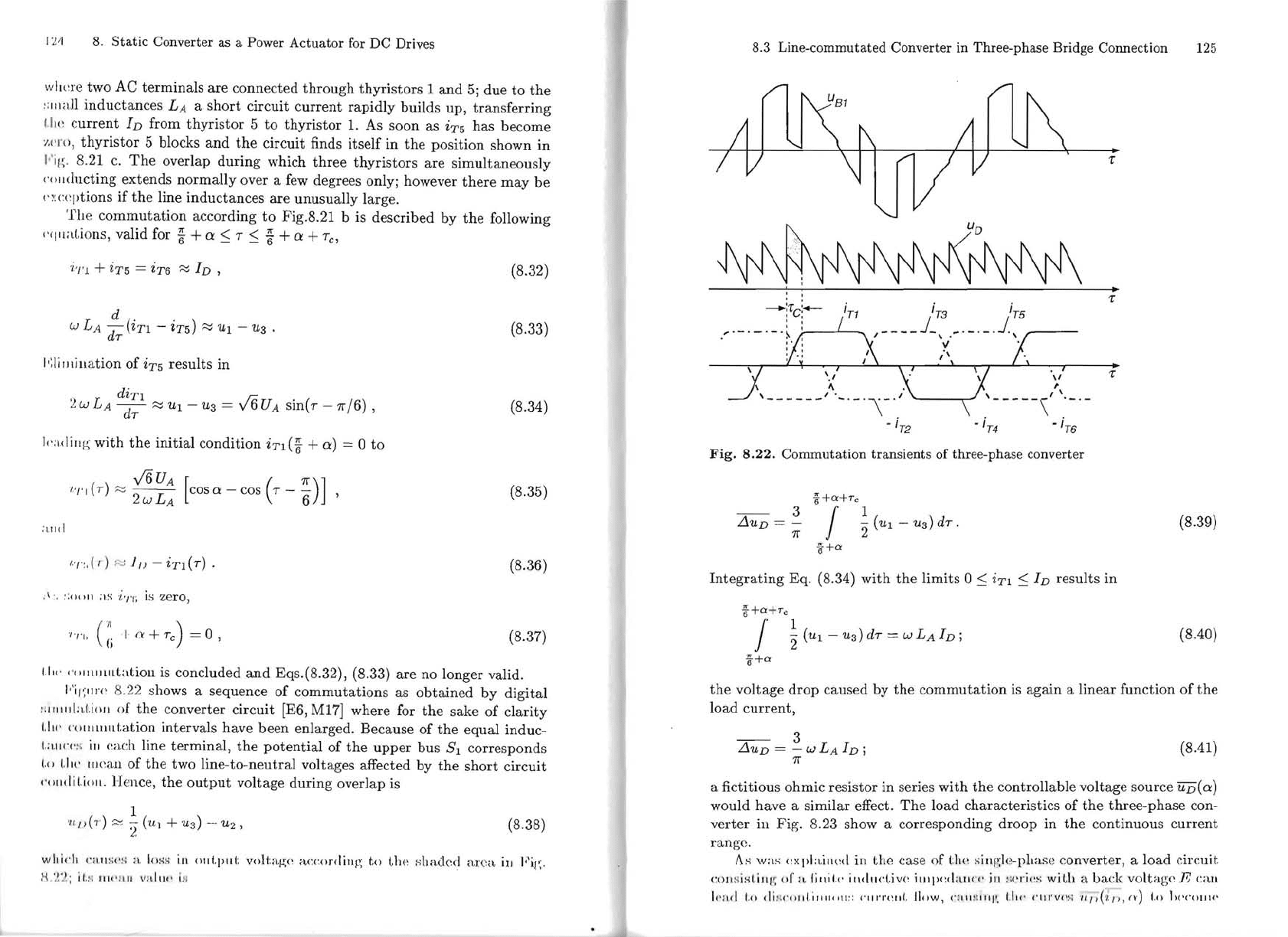
I"Í/';IJI'('
8.22 shows a sequence
of
commutations
as
obtained
by
digital
:illllld:tI,
ioll
of
the
converter
circuit
[E6, M17] where for
the
sake
of
clarity
/.lI('
('OIIllll1ltation intervals have
been
enlarged. Because
of
the
equal
induc-
1.;\,
\1,,(,
:;
iii
(:ach line
terminal,
the
potential
of
the
upper
bus
SI corresponds
Co
LI\(,
IIJ(
~i).I
l
of
the
two line-to-neutral volt ages affected by
the
short
circuit
('olld Í
LÍolI.
Hence,
the
output
volt age
during
overlap is
1
'IIO(T):::::::
;;(UI
+U3) - Uz,
(8
.38)
whicli
l'I~
II:
Wh
n
Ins,~
i.1l
OllLpllt
vol1:;I,f2:(~
accor<lillp;
to
tIl(-' Hhaded are;t
ilJ
Fi/~,
H
'
~
,
'l
;
í
1.
,;
HI
P
r"
ll \lJ\lIIIIrI. í
"l
8.3
Line-commutated
Converter
in
Three-phase
Bridge
Connection
125
,
-:'fc:+-
.
,._._._.~)
~
, ,
:
o.
i .
J
T3
'T5
,
_____
,
~._._.J.
.
.;'
,
1\
\ I
i..
\
-'
.-.-."-
,-----
\
'f
'f
'f
- i
T2
- iT4
- iT6
Fig.
8.22.
Commutation
transients
of
three-phase
converter
-ij-+a+T
C
3
LlUD
=
:;
I
~(UI-U3)dr.
(8.39)
-ã"+a
Integrating
Eq. (8.34)
with
the
limits O
~
in
~
ID
results
in
i+;"'.+TC
1
2'
(UI
-
U3)
dr
= w L A I D ;
(8.40)
-ij-+a
the
voltage
drop
caused by
the
commutation
is
again
a linear function
of
the
load
current,
--
3
LlUD
=
-wLAID;
(8.41)
7r
a fictitious
ohmic
resistor in series
with
the
controllable volt age source
uD(a)
would have a
similar
effect.
The
load
characteristics
of
the
three-phase
con-
verter
in Fig. 8.23 show a corresponding
droop
in
the
continuous
current
range.
As
was cxpbilH:tl
in
the
case of
t:hp
sillgJe-phase
converter, a load CÍrcllit
co
nsistill/,: "r
lt
(illil,,'
illdllctivc: illlpcdaw',· iII
:
:<'ri(~s
with
a
back
voltag(
~
]i)
Citll
1<-0<1
1.<1
din
..
c"t!,'IIIII<lII:
:
'·III'I'(
~
1I1.
lIow,
,';III:
!
II\I',
UIC'
rIII'V,'
H'll.p(F/l,
n)
t.o
1)('('olJl<'

126
8.
Static Converter
as
a
Power
Actuator
for
DC
Drives
Ilighly nonlinear; this is seen
at
the
left
of
Fig. 8.23.
With
an
appropriate
clloice of
the
smoothing inductance
LD
the
region
of
discontinuous
current
C<LU
be
restricted
to
light load so
that
it
is
not
noticeable in
normal
operation;
I.lle
requirement for
the
filter
time
constant T
D
to achieve continuous
current
i.'
; considerably relieved with a three-phase converter.
However, if
the
smoothing reactor is further reduced or completely omit-
I.I
~
d
for cost reasons, discontinuous current
flow
can agaín occur even
under
lo,td.
ln
view
of
the different
motor
dynamics
this
may
require special provi-
,-;iou
s when designing
the
control, as will be explaíned in Sect. 8.5.
U
o
~
io
IOn
'I
'
Ice
l.clllporary short circuits
of
the
AC
terminaIs during
commutation
lIavc
()[
(".OUfse
an
immediate effect on
the
waveforms of
the
AC voltages, pos-
,:ildy inlluencing neighbouring equipment. One
of
the
terminal voltages
UBl
wil.h
rc
~
SP(
~
ct
to neutral, Fig. 8.18, is
plotted
in Fig. 8.22.
ln
a weak supply sys-
1.('111 haviug a large internal impedance,
the
danger
of
inadvertent feedback
to
1.11('
("'Ollvcrter
through the synchronising signals exists which may even cause
ill.
~
l.a.bility
[A11].
Apart
from
the
obvious,
but
not
always practical, solution
(Ir
lill.
crillg
t.he
synchronising signals, there are various "supply-independant"
lirilq(
S(".hClll(~S
wit.h
internal oscillators
that
permit
stable operation even
with
hil':hly
di:;l,oJ"l.cd
lill(
~
volt ages [H61,M16].
Three-phas
e firing circuits
ar
e
abo
n
Vl~
ih"k
iII
1.
11<
' (onll
()r
il)I.(~gral,cd
circuits (chips). .
u
oo
discontinuous current
~
/
:1
1
;::-
\
\
a=O
°
\
60
0
~
~inuous
current I
\ I
\
1 0,5
90
0
tI
,.'
r
/
/
a 150
0
-
"'1\( H.4:1. I,oad curves
of
a 6- pulse converter
8.3 Line-commutated Converter
in
Three-phase Bridge Connection
127
The
dynamic
behaviour
of
the
six-pulse converter is similar
t0
that
of
the two-pulse converter
with
the
exception
that
now
the
steady-state
firing
intervals are
1r/3,
instead
of
1r,
permitting
faster access to
the
output
volt age
UD(T).
The
waiting interval is now between O
and
1/6
f corresponding to 3.3
ms for a 50 Hz-supply.
The
firing control of a three-phase converter is simply
an
extension
of
the
firing scheme for single phase converters (Fig. 8.11), employing several
time-displaced saw-tooth functions to sample
the
output
signal
of
the
con-
troller. For example, Fig. 8.24 displays voltage transients
UD(T),
neglecting
commutation,
which follow a
step
change of
the
firing angle from rectifier-
to
inverter
operation
and
back.
When
the firing is delayed,
the
current
carrying
thyristors
simply
remaín
conducting until
the
line volt age
has
changed its
sign, while in opposite direction
an
immediate response is possible.
It
may
even occur, as seen in Fig. 8.24,
that
some
thyristors
are
skipped because
of
a
multi pie
commutation
with
several-
in principIe ali - thyristors
temporarily
conducting,
with
the
ones connected to
the
highest
and
lowest line volt age
potential
eventually prevailing.
a=
15
0
multiple
n+,g.
commutation
wt=1'
:1
":2,
2n+
"6
n
--::c;;}.,\
Fig.
8.24.
Control transíents of a 6- pulse converter
A feature
of
the
three-phase bridge connection is
that
two thyristors have
to
be
fired simultaneously for
start-up
and
in discontinuous
current
mode, one
in each
rOWj
otherwise
the
current
could
not
begin
to
flow. This is achieved
either
by employing wide pulses
(LlT
>
1r/3)
so
that
they overlap
or
by
generating
for each
thyristor
two
short
firing pulses,
1r
/3
apart.
Normally
the
second pulse would be applied
to
a
thyristor
that
is already conducting
and
be
of
no consequence.
If
the
first solution is preferred,
the
firing pulse
may
be
chopped into narrow pulses to redu ce
the
voltage-time-area
and
the
size
of
the
pulse transformers.
The
iupllt curre
nt
ofthe
converter, drawn in Figs. 8.19 d
and
8.19 d with-
oul
t;ü
.i
llg
COllllllllt.a.tioH
into account, is
the
sarne as
the
current
that
would
fl
ow
iII
I.hl'
prilll1\.ry
willdiug of a Y
/Y
-
<:ollll(~ded
tr
ansformer supplyillg
th
e
convI'rl."
I"
.
Illlw"
v
"r
, til.·
w:l.vc{llnll
nl"
ti
II'
prill
ll
u'
'y
1·.lIrJ"(~1I1,
dlall
f1
:(
~
S
ir (III(:
0('
I.h(~

128
8.
Static
Converter
as a Power
Actuator
for
DC
Drives
ia
2ia
J'O
~'
n
'
~
:
2nl
a
1
r
b
io
iO
a
1
U
o
U
o
a
2
a
2
III
U
02
~
a
b
i3
ia
i
p1
i
p2
ip3
a
Supp/y
F
ig
.
8.25.
Three-phase
converter
supplied
by
Y /6-
connected
transformer.
(n
) Circuitj (b) Waveform
of
primary
current
I.r,wsJ"ormer windings
are
.6-connected
as is explained in Fig. 8.25. Assume
1.";tI,
Lh
e
constant
load
current
I
D
is initially flowing
through
the
thyristors
·1 a.lI<I
G,
closing
its
path
through
the
Y-connected
se
condary
windings of
1.11(
' I.ransformer.
When
negle
cting
the
magnetising
curr
e
nt
and
assuming -
1'
)1
.
~alc
e
of
simplicity -
equal
numbers
of
turns,
the
following
equations
then
Ilold
for
the
primary
currents
Zp
l =
i3
-
iI
= 2iD ,
i
p2
=
iI
- i
z
=
-iD
,
(8.42)
'
lp3
= i
z
-
i3
=
-iD
Pecrllutation of
the
six possible
states
yields
the
primary
current
waveform
/1'1
(T)
shown in
Fig
, 8.25 b which also
contains
the
5th
and
the
7th
as
the
lowesL
ord(~r
harmonics.
With
the
appropriate
eho
j('(
õ of tlw llllmber of
turns
!.II<'
Y -
<Lm]lh
e .6-collnectcd windings c
ould
b(
~
iJlI,I'IT!J;I,lI!1;('d witho
ut
altering
!.II('
1·
.
IlLTI
~
lI!.
wavI~f()l.'lll
S
.
1'
\
n
~
qll'~ltI.l'y
in
I.h(~
Jla.~!.
,
Lll<l1Il';h
less
t'
llllllIlOld
,l'
1I0W, (,
III
!
oulput
volLa
l1
;t
~
o!.l.ailI;dti"
wi!.h
ii
, ('OllVI'r!.l 'r
11IWill
U
()
II(' I.h'yl' in
l\
lI
' 1"'
1'
l'I'
H.
llch
WHH
ill
s
llfl
ir
in ll!.
I
I"
I.h.'
11.
I.h,yl'ln!.ol'lI " .
lI
d
Lo
1)('
(·(lIllll'(l.I'd
i II nn
1'1
I'
r!
.
~i
(l
1\
1I'
1
~
c1vlI
,
itl
,
H
W
'
R
!lla'y
!.lil'lI
I ...
JlllÍ
liI'd i
I'
1
11
1/1
1·,,
<1
III'
I
lO'
ril
'::
(,olllll'l
'111'l'. l w
ll
vl
dl
dd 1," Yl lill.ol'
/i
(·
<)llIpll'i.l'
8.3
Line-commutated
Converter
in
Three-phase
Bridge
Connection
12
9
Fig.
8.26.
12-pulse-converter consisting
of
two 6-pulse converters
in
series-
and
par
aliei
connection
three-phase
circuits
are
connected in series, as seen in
Fig
. 8.26 a.
Rather
than
taking
precautions
for
equal
voltage
sharing
between series connected
blocking
thyristors
one
now relies on
the
output
voltages of
the
transformer
to
produce
the
correct voltages. AIso, if a Y / .6-connection
with
its
inhe1'-
ent
30°
phase
shift is chosen for
the
secondaries
there
is
an
added
benefit
in
the
reduction
of
harmonics
on
the
load-side,
where
only multiples of 12 f
occur, as
weU
as
at
the
line-side, where
the
harmonics
are
those
of
a 12-pulsc
converter,
with
the
11
th
and
the
13
th
being
the
lowest harmonics;
there
is
a
further
improvement
in
dynamic
response
because
the
maximum
waiting
interval
is now 30°.
Another
similar
circuit is seen in Fig. 8.26 b where two six-
pulse
converters supplied from a Y /
.6-connected
transformer
are
connected
in paraUel, employing two se
parate
chokes or
an
interphase
transformer
for
summation
of
the
currents.
The
principIe
of
achieving 12-pulse
operation
by
se1'ies connection
of
complete converters is
applied
also on
HVDC
transmi
s-
sions
with
hundreds
of
MW,
where
many
thyristors
are
still series
connect(
·
~
tl
in each
converter
branch.
This
brief
introduction
to
the
fundamentaIs of
line-commutated
converl
~
ers seems
adequate
for dealing
with
most
drive problems. A
more
detailcd
analysis such
as
harmonics,
circuitry
01'
protective
measures is given in tlw
specialised
Iiterature
[50,
58J.
It
should have become clear
that
multiphas(~
static
power converters are electrical
actuators
of
superb
dynamic
perfor-
mance
providing
an
excellent tool for controlling large
output
power (MW)
with low powcr control signals
(mW)
in
ve1'y
short
time
(ms).
This
combjna
~
tiOIl
is
\I11lllal.dl\~d
hy ;),IlY
oth
e
1'
type
of
power actllator.
On
the
othe!'
hawl
iI.
:;\Jollld
1)('
)lol.,'d I.Ilal.
dlw
1.0
I.\w switchilll-!;
adioll
sL;t.tic
pow(
~
r
COII\lI'I'I.,'I':; arc'
1:-)0
8.
Static
Converter
as a Power
Actuator
for
DC
Drives
inherently nonlinear. Since
they
have no internal energy storage
the
output
power is instantaneously transferred into the AC line causing harmonics
and
reactive power
in
the
supply system; strong grids are therefore required to
s
upport
the
operation
of large power converters.
Even
shorter
response times are feasible with force
commutated
converter
circuits, discussed
in
Chapo
11;
while
the
power
ratings
available
today
are
adequate
for drives, they do
not
yet reach
the
leveIs needed in energy supply
systems.
8.4
Line-commutated
Converters
w
ith
Reduced
Reactive
Power
II I the preceding sections
it
was shown
that
line-commutated converters draw
l"<
'active power from
the
line; this is inherent
in
the
principIe of control by
ddayed
firing which results
in
lagging current
at
the
AC side of
the
converter.
Siu
ce
the
phase shift of
the
fundamental component of
the
line
current
is
dircctly related
to
the
firing angle
a,
the
situation
is particularly sever e
at
n
~
~,
where
the
line current is,
apart
from
the
losses, purely reactive.
This
('olJdition is unavoidable, if
the
converter
is
supplying the
armature
of a DC
IlI
ot
or because when
the
motor
starts
from standstill
the
induced volt age is
illitially zero
and
the
converter
must
be controlled
dose
to
a =
~;
hence
<L
large motor, for example a mine hoist drive
starting
with twice nominal
Cllrrent causes a huge surge of reactive power
on
the
supply side.
There
is no
('
a
~;
'y
remedy because capacitors carrnot be switched in
and
out
as
the
speed
..
11i\.1I1!;PS
alld
the
cost of
rotating
or
static
reactive power compensators would
III'
I,O()
high.
UA
-
iII
iO
2'
Uo
1 '
I"i~~.
8.27.
Single-phase
converter
with
a
shunting
diode
'1'111'
Hil.lllll.ioll
11I1I.'y
I)(~
t
.
oh~rablc
wil.h
l:i
t.r:onf~
s
lIpply
sy
s
t(
~ IlI
S
huI.
is
Illlac-
""pl.
l
d,I,'
"II
1.
J'l
II'Ll
lIlI driv" ll,
wl)(')"('
t,1i,
: r·(':t('(,iv('
('li
rn''lIt, iII
c(lluhillaLioll
wil.h
8.4
Line-commutated
Converters
with
Reduced
Reactive
Power
131
the
large
inductance
of
the
power supply comprising
the
catenary would cause
heavy voltage fluctuations, in addition
to
the
harmonic distortion. Mainly for
the
benefit of
traction
drives special circuits
and
control techniques have been
developed
with
the
aim
of limiting
the
reactive power
at
reduced
output
volt-
age. Some of these circuits contain diodes as well as thyristors [D25, S57].
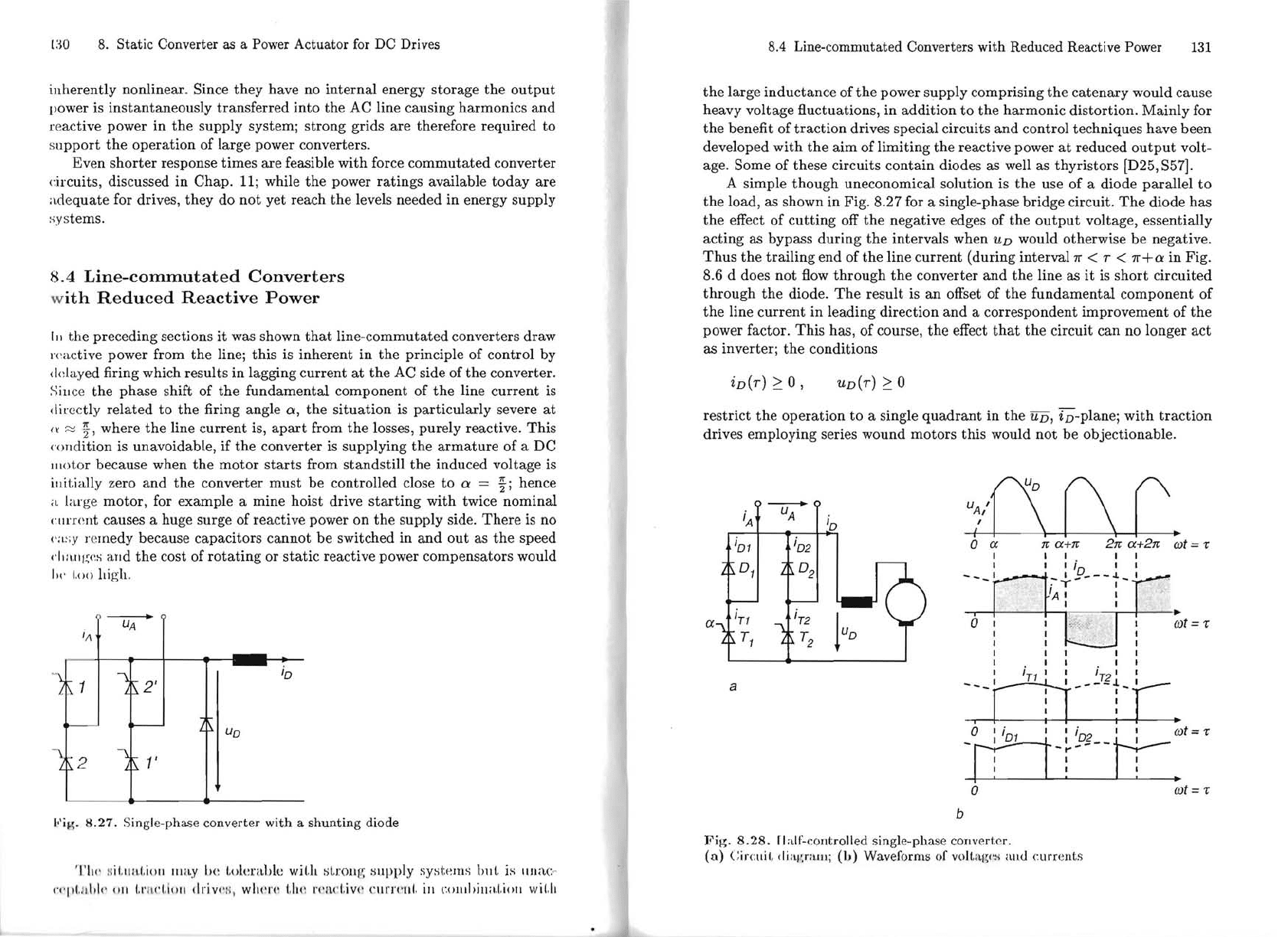
A simple
though
uneconomical solution is
the
use of a diode parallel
to
the
load, as shown in Fig. 8.27 for a single-phase bridge circuit.
The
diode
has
the
effect of
cutting
off
the
negative edges of the
output
voltage, essentially
acting as bypass during the intervals when
UD
would otherwise be negative.
Thus
the
trailing
end of
the
line current (during interval1l' < T <
1I'+a
in Fig.
8.6 d does
not
flow
through
the
converter
and
the
line as
it
is
short
circuited
through
the
diode.
The
result
is
an
offset of
the
fundamental
component of
the
line
current
in
leading direction
and
a correspondent improvement of
the
power factor.
This
has, of course,
the
effect
that
the
circuit can no longer
act
as inverter;
the
conditions
iD(T)
~
O ,
UD(T)
~
O
restrict
the
operation
to
a single
quadrant
in
the
UD,
iD-plane;
with
traction
drives employing series wound motors this would
not
be objectionable.
-
":f'\
í\
I.
Ô a n
a+n
~+2n
wt==T
I
I
a,1
I
wt
==
T
I
I
I
I . I I . I I
---CTt-_:Tlj-t
,
I.
O I i I I i I I
wt
==
T
OI
02
-r=r::-=t-f----~.
O
wt
==
T
b
Fif.;. 8.
28.
flalf-controlled single-phase conve
rt
er.
(n)
CirclIit, clial'.ralllj
(h)
Waveforms of
volt.rtg
ps
nao
curr
e
nt
s
iA
u
A
i
OI
i
02
DI
O
2
i
TI
i
T2
TI
T
2
io
a

1:\2
8.
Static
Converter as a Power
Actuator
for
DC
Drives
Another circuit
with
similar properties
is
shown
in
Fig. 8.
28
a, which
I,d
ongs
to
a class of half-controlled converter circuits containing diodes
in
"la
ce of some
of
the
thyristors. Here too,
the
line current
cannot
flow
against
I.I\(
~
line voltage and
thus
cause a
temporary
power
flow
from
the
DC
to
the
I\C
side, since
the
opposite diode would conduct
and
act
as bypass.
Figure
K.2
8 b shows a simplified
diagram
of
the
volt ages
and
currents, neglecting
IIw
co
mmutation
intervals. Again
the
trailing
end
of
the
line current is cut-
,,
:
r,
tltereby advancing
the
fundamental component
and
improving
the
power
f";wt
o
!".
Clearly, this circuit could be easily extended
to
form a half-controlled
1I1r<
"'-phase bridge connection.
U
o
iO
(1
-~--~--
-
_
.
_~---
a=O
2U
01O
2
a=-
_______
1f.
_____
_
'
U
o
U
OIO
-
iO
"'
i
l
~
'
1'
.2,. .
Bon
sl.··
and
-
bu
ck connection of controlled
and
un
controlled converter
i\
1.
,·('I'lIiqll(, ror improving
the
power factor
at
the
input
of
the
conve
rter
,::
1)111.11111
'"
iII
I"ig
.
8.
29
a, showing a "boost
and
buck"-scheme
of
a three-
1,1,11:
:"
I<
'("t
ili
"r
co
llt.aining only diodes,
and
a three phase
thyristor
converter;
1,\,
"IIIJll
oy
illg a transformer with Y / 6. secondary windings
the
harmonics
:
,il.lliI
.
l.ioll
Ill
ay
oe improved as well. This connection makes use of
the
fact
1.
11:1.1
, ;, CIlllverlcr
operating
at
a = Oor a = a
max
has a tolerable power fa
ctor
w
ltil<-
o
jl
cral.ioll
at
a
~
~
should be avoided, if ever possible.
The
total
mean
IlIII
.
plll.
vo
ltage, assuming continuous current, covers
the
range
II"
I
fi
+ Un
40
cos a
m
1\
X
:S
U D
:S
UD
10
+ UD
20
.
(8.43)
Hy .'
;(
d('("I
.illg
th
c voltagcs according
to
the
condition
I I , ) lO I
(lo
~IJ
(:OS Ü
'''"
X
,
~C
O ,
1.1,..
(
'
Illllpld(
~
lir
~:
1.
(jlladralll.
of
I,\w
'iTiJ
, io-plnw' is within reaeh. Tha.t.
this
cl
l ('
llil.
1i:1
:1 a
1)(
'1.
1.
1'
1'
l"(
'
aC"i'
.i
v('
»OW(
'[
habli
ll<"
l'
til/u
I.
a
sirll~I('
c()n
:v
(
~
rt.(
~
r
cin
:
lI
;it
r"
II
I1
WII
II'IHII
1,
11<"
eli
do
I.h
a
l.
rOI" JIlillillllllll I
UI"
!II
H.lr
iullI!1I
voll.n
'
I'
:
<',
i.
l'
.
"11,
/1
N
()
IUe!
"
I'
"I
',
,, ,,
,,
h,,
1.
1t
;i.
·,
'
Id
"lI
lI
"I
",,
'td,,' wi
U,
/',1"
,,
1
I'0
W
"I
'
l'ilC"i,or
.
II.
iii
,,"Iy
8.5 Control Loop
Containing
an
Electronic Power Converter
133
in
the
centre, U D
~
U
DlO,
where
the
controlled converter, accounting for
about
half
the
total
power, is fired
at
a
~
~.
At
full
output
voltage, a =
O,
the
circuit corresponds
to
Fig. 8.26 a, causing approximately 12-pulse line
interactions.
The
principIe
of
boost-and
-buck
operation
may be generalised by
splitting
the
full voltage range
±U
o
and
assigning
the
bands
of
±Uo/n
to
n series-
connected
thyristor
converters which are supplied from
separate
transformer
secondaries.
The
control
is
then
arranged
on
a sequential basis such
that
only one section is phase-controlled with O < a <
a-max,
while ali n - 1
other
sections are
operating
either
with a = Oor
with
a = a
max
· 8equential
phase control
is
of
particular
interest if
the
converter needs
to
be
subdivided
anyway for reasons
ofthe
high voltage required.
This
technique
has
also found
application for rai!
traction
drives
[K70].
8.5
ControI
Loop
Containing
an
EIectronic
Power
Converter
Line-commutated
converters are ideal
actuators
for electrical drives; a
main
feature,
apart
from their simplicity, proven reliability
and
practically unlim-
ited
output
power is their excellent dynamic performance. AIso, electronic
controllers
can
be directly connected
to
the
firing circuit which consists of
integrated
circ
uitry
and
logic devi ces
operating
at
signallevel.
When
a
controlloop
containing a converter is
to
be
designed,
the
question
arises, how
the
dynamic behaviour of
the
converter should
be
described by a
mathematical
model.
The
difficulties stern from
the
fact
that
the
firing of a
thyristor
is a discrete process -
th
e firing angle
is
not
a continuous function
of
time
-
and
that
the
steady-stat
e
and
dynamic behaviour of
the
converter
is
highly nonlinear. Pulse-
and
phase-modulated sys
tems
of
this
or similar kinds
have been frequently dealt
with
in
the
literature
but
no coherent
theory
exists
which is simple enough for general application [G31, L3, P46, 824].
A detailed analysis of dynamic processes
in
line-commutated converters
is
rather
involved;
the
transients
are described by nonlinear difference equa-
tions which defy
an
analytical solution. Linearisation of
the
equations is of
course possible
but
the
validity
is
then
restricted
to
the
vicinity of
the
chosen
operating
point. However, as a first order approximation
it
is
found
that
the
converter dynamics can be entirely neglected as long as
the
control plant,
fed by
the
converter, has a low-pass characteristic,
the
controller contains
an
illt.
e
grating
term
and
the
controlloop
is
to
be
well
damped
[F12, L35]; these
couditiolls are usually
met
on drive applications. Near
the
stability limit
this
Silllplificatioll is of course no long
er
valid;
th
ere
it
is
necessary
to
revert
to
Lll(;
ac(".lIril
.
t. (
~
IlIodd
(
~
qllations
.
1\11,,1.1[("1"
::
illlpk
ll\(
)(
ld
th
a
t.
lm
s
se
rv(
~
d
wdl
ill
pr
ac
tice is based
on
the
oh
:;('
l"
v;
Ii
,
j"lI
1.11:11.
;1 varia.
hl
!'.
w;I,it.illl
~
1)('I"i
(
1(1
"!:q)s('s
III1t.il
a s
lIl
a
Il
cha.ng(~
of t
,h
e

---
1:J1
8.
Static
Converter
as a Power
Actuator
for
DC
Drives
illput signal
Yl
to
the
firing circuits (Fig. 8.11) shows
an
effect by shifting
I.lte
first firing pulse.
As
the
waiting period depends on
the
instant
at
which
I.
he
input
signal
is
changed, varying between zero
and
20/6
ms = 3.3 ms for
i i
si
x-pulse converter
operating
on
the
50
Hz
supply, a mean equivalent delay
I.im
e
Tr
= 1.67 ms is
postulated
[52].
This
heuristic mo dei produces useful
n
~
slllt
s
,
as long as well
damped
transients of
the
closed loop are
the
objective
IIIl
t étgain, as
the
stability limit is approached, considerable deviations from
1.1)('
predictions must be expected.
Th
e
most
effective
method
of neutralising
the
nonlinear
and
discontinuous
1l('!J<tviour
of
the
converter is
to
enclose
it
in a
tight
feedback control loop
w
hi
ch
then
imposes characteristics
of
a nearly linear
actuator,
such as
unity
I
',
ail!. By electronically limiting
the
current
reference
iD
ReI
a fast
and
very
drl
~
ct.ive
overload protection of
the
converter as well as
the
motor
and
the
111
1
~
dlanicalload
is
achieved.
'l'his is outlined in Fig. 8.30, showing a converter with inductive
impedance
il.lld
a back voltage e in
the
load circuito
With
the
help of a
current
controller
I.!JI'
Olltput
current
is
tracking
the
current
reference
iDR
e
l,
independent
ofthe
1)<1('1\
voltage which acts as a load disturbance. On a
DC
drive, where
the
load
circllit
is
represented by
the
armature,
possibly in series
with
a
smoothing
illdlld,or,
the
parameters
could be such
that
the
volt age drop
L\UD
at
nomi-
lIitl
(,IlLTCIlt
is
only a
few
percent
of
nominal voltage
and
that
for a =
O,
e = O
;t!,OIlI.
I~ight
or
ten
times nominal current would flow. A function-generator,
a:;
)Ildica(.ccl in dashed lines, could be included
to
linearise the steady
state
,',
IIll.r,,1
c1larad.eristic of
the
converter (Fig. 8.8); frequently
the
flat ends of
ii,.. ('''lll.ro] curve only serve as a
temporary
volt age reserve for transients.
1,',,1
1.111'
:':lI"S(~q\lCllt
simulation, Fig. 8.32, a firing circuit with
an
internally
'
1'11<'111
"lIj.,;(~d
oscillator was modelled.
Lo
II)
nuf
~
,
--",
e!
io
io
~=--
LI
________
Fil
{.
1-1.:10.
CO
llv
e
rt
er
with
current
control
'1'11
(' circni(.
in
Fi
g.
8.30 is now transformed
into
the
linearised block dia-
1
~
1
1
\l1I
iu
Fil';.
R.
:n
,
wh(
~
r<
:
the conve
rter
with
it
s control circuit
is
approxirnatcd
I,.v
11
.
11
(:
qUiV
l
dl
'
lll.
111
(
'11.11
dd<J
,y
, which
for
a fi-pulse
umvcrter
a
nd
50
Ih-
sllpply
II
'
l
~
"
r.~
1
.'
1
111.
'1
I,'m
::
IIl()(ll.hiu
g
t.iI,'
I·UlT(
'
1I1.
rl
'I'llbac/( sigual)
TI
:' 2
IIl
Il
IIla
y
III
' 1
11
11
11
11111',[
wil.h
Il
In
x
1'111
11
" 1·
IlIIV,'rl."I
' . 'l'
lli
:!
1111
111<'
.1"1
)
"11.1
11
al
l'l
ll
"II
whl'l,
IIl
'I'
8.5
Control
Loop
Containing
an
Electronic
Power
Converter
135
e
io
Ref
}Q..
lon
lon
U
oo
Fig.
8.31.
Simplified block
diagram
of
current
control
loop
the
current
sensor
is
installed on
the
AC
or DC si de of
the
converter. Sensing
the
line
current
is
simpler because current transformers
with
an
output
recti-
fier offer inexpensive isolation; a DC current sensor in
the
load circuit, which
may
be faster, more
accurate
and
responding
to
the
sign of
iD,
is likely
to
be more costly.
The
use
oflow
levei control signals, typically
10
V, which
are
electrically isolated from line
potential
is a necessary condition for safety rea-
sons.
When
designing
the
controller,
the
delay of
the
converter
and
the
filter
time
constant,
which are
both
small in comparison
with
the
time
constant
T
D
, are
lumped
together
to
Eorm
an
equivalent lag
Te
~
4 ms.
A proven design
method
for
the
current
control loop was discussed in
Sect. 7.2.
lnstead
of
the
PlD-controller
that
would be desirable
with
a slowly
responding
rotating
generator, a Pl-controller is quite
adequate
here.
ln
fact,
a PlD-controller, whose
step
response begins with
an
impulse,
may
cause
inconsistent results in conjunction with
the
discrete firing circuit so
that
the
additional
lead
term
is usually
omitted
.
Hence
the
open loop transfer function
oE
the
current
control scheme is
T
i
s+l
1 GD
(8.44)
FoL(s)
~Gc,i
TiS
T
s+lT
D
s+l'
e
where Gc,i is
the
gain
and
Ti
the
integrating time
constant
oE
the
current
controller. A typical time
constant
of
the
load circuit is TD = 30 ms. Because
of
Te
« T
D
the
transfer function may bc simplified in
the
region of
the
cross-over frequency, which determines
the
band
width
of
the
closed loop,
1 T
i
s+l
(8.45)
FoL(s)
~
Gc
,iG
D
rn rn
-
~
Te
S + 1 .
This
is in line
with
the
"symmetrical
optimum"
mentioned in Sect. 7.2.
The
be
st
choice of
parameters
is [KI8,37]
Ti =
a2T
~
)
GOL
=Gc
,iGD
=
~
TD
(8.46)
a
Te
'
wltl
~
n
'
I I
"2
J)
f'ollowti
frOI/l
t.he
Iksin'd dalllpillg
ratio
D of
the
complex (f.
Jl
ai
r (lI'
l'I
I\" lIV:t.lIII':';
II
I
01'
f)
1/ ) 2 ir;
fr<'qlll'lIl.1y
('hos(:11.
I
:I(i
8.
Static
Converter as a Power
Actuator
for
DC
Drives
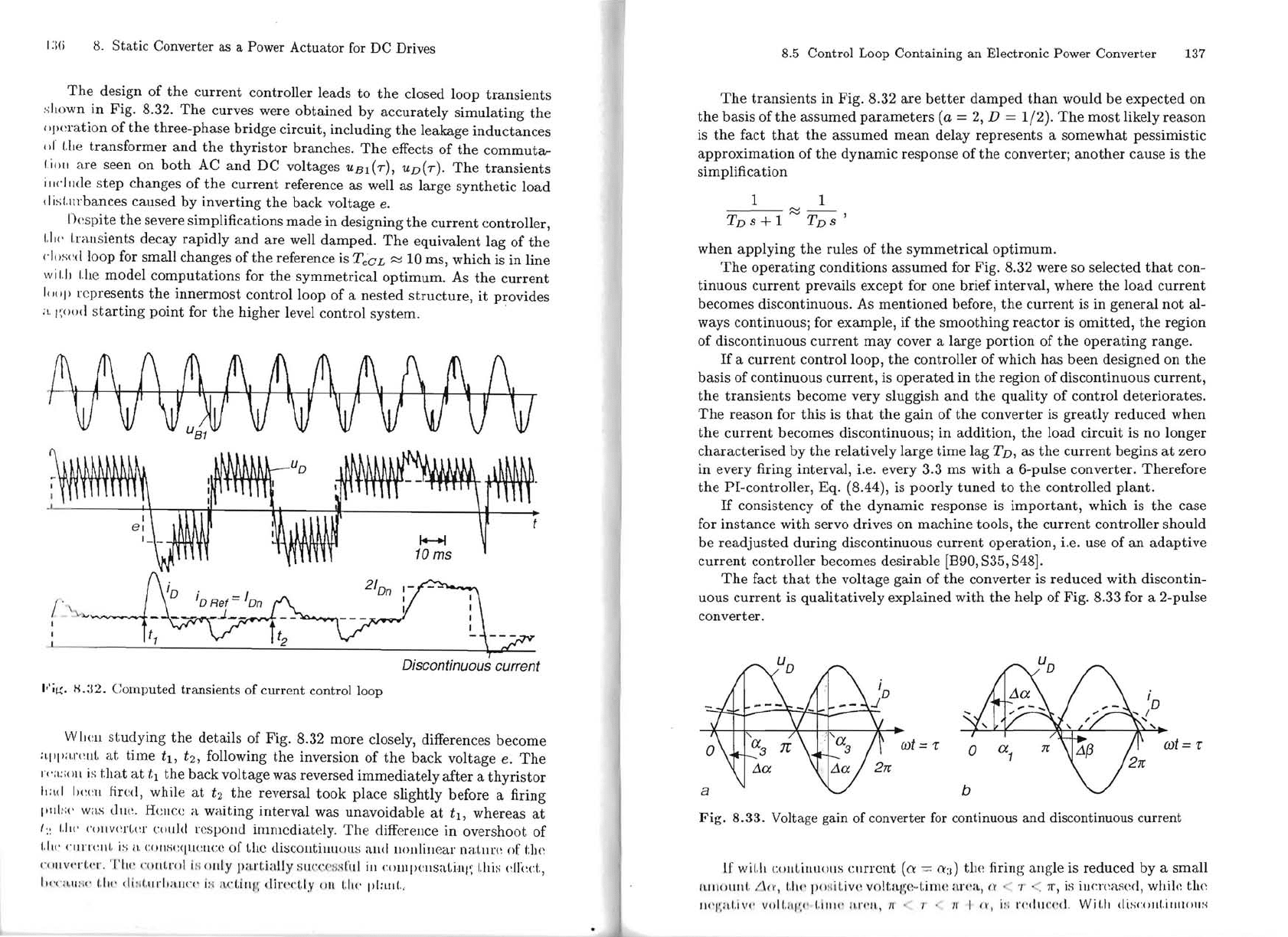
The
design of
the
current
controller leads
to
the
closed loop
transients
sllOwn
in
Fig. 8.32.
The
curves were obtained by accurately simulating
the
opcration
of
the
three-phase bridge circuit, including
the
leakage inductances
(,1'
Lhe
transformer
and
the
thyristor
branches.
The
effects of
the
commuta-
Liotl
are seen on
both
AC
and
DC voltages uBdT),
UD(T).
The
transients
illdllde
step
changes of
the
current
reference as well as large synthetic load
.I
isl.lll'bances caused by inverting
the
back voltage
e.
Ikspite
the
severe simplifications
made
in designing
the
current controller,
t.11I'
I,
l'<tll
sients decay rapidly
and
are well damped.
The
equivalent lag of
the
('Ioscd loop for small changes of
the
reference
is
TeCL
~
10
ms, which is in line
w i
I.IJ
Lhe
model computations for
the
symmetrical optimum. As the
current
I""p rcpresents
the
innermost
controlloop
of a
nested
structure,
it
provides
;\.
I\ood
starting
point for
the
higher leveI control system.
f\f\f\A
WVV\f1A
9
til
\[Jll
I,'i,<,
H.:
.12.
Computed
transients
of
current
controI Ioop
Wlicll studying
the
details of Fig. 8.32 more closely, differences become
ai'l'ar(~llL
at
time
tI,
t2,
following the inversion of
the
back voltage e.
The
,(
':J,
;;O
Il
is t.hat
at
1;1
the back voltage was reversed immediately afier a
thyristor
",
1..1
hCCll fired, while
at
t 2
the
reversal took place slightly before a firing
i'1I1
~;
('
was
dll('.
Rellte
a waiting interval was unavoidable
at
tI,
whereas
at
I:~
1./11'
('(lI1v('r[,(~r
could rcspoJld
immcdiat
ely.
The
differellce in overshoot of
LI\('
\"IITCIII. is i\. COIIK<'ljuc
nce
o[
Lhe
discOlLtil1l1
o
u
~
nud
lloulill
e
ar
n
a.
tllre
of
tlw
(·
/'IIV
.TI.p
r.
Tbt'
l'
onlr,
rll
l lN olllly
JHI
,r
tia
ll
y Sllc.
c(
's,
qf
ll.l
iII
('
.OlllpcllsaLÍ.JII';
L!tis
dl(~d
"
1'
·
(
'
n~
II:
;(
'
1,1,
11'
d l
ll
!.u
rlI
H
IJ(
·(' ii';
1I.('
1.i1l,
~
,lil'('d.I:
,Y
1111.
1./11'
plalll
..
I
~
~
I+-+l
10ms
.
~
,
________
JI~t1~
__
~~
____
~
____
~~
__
~~~~~~\,::oé~.~
Discontinuous current
8.5 ControI Loop
Containing
an
EIectronic Power
Converter
137
The
transients
in Fig. 8.32 are
better
damped
than
would be
expected
on
the
basis of
the
assumed
parameters
(a
=
2,
D =
1/2).
The
most likely reason
is
the
fact
that
the
assumed
mean
delay represents a somewhat pessimistic
approximation
of
the
dynamic response of
the
converter;
another
cause is
the
sim plification
1
1
----~
---
TD
S + 1
~
TD
S '
when applying
the
rules of
the
symmetrical
optimum.
The
operating
conditions assumed for Fig. 8.32 were so selected
that
con-
tinuous
current
prevails except for one brief interval, where
the
load
current
becomes discontinuous. As mentioned before,
the
current
is in general
not
al-
ways continuous; for example, if
the
smoothing reactor is omitted,
the
region
of discontinuous current
may
cover a large
portion
of
the
operating
range.
If
a
current
controlloop,
the
controller of which has been designed on
the
basis of continuous current, is
operated
in
the
region of discontinuous
current,
the
transients
become very sluggish
and
the
quality of control deteriorates.
The
reason for
this
is
that
the
gain of
the
converter is greatly reduced when
the
current
becomes discontinuous; in addition,
the
load circuit is no longer
characterised by
the
relatively large
time
lag TD, as
the
current begins
at
zero
in every firing interval, i.e. every 3.3 ms with a 6-pulse converter. Therefore
the
PI-controller, Eq. (8.44),
is
poorly
tuned
to
the
controlled planto
If
consistency of
the
dynamic response is
important,
which is
the
case
for instance with servo drives on machine tools,
the
current
controller should
be
readjusted
during discontinuous current operation, i.e. use of
an
adaptive
current
controller becomes desirable [B90, 835, 848].
The
fact
that
the
volt age gain of
the
converter is reduced
with
discontin-
uous current is qualitatively explained with
the
help of Fig. 8,33 for a 2-pulse
converter .
wt
=-r
Pig.
8.
33.
VoItage gain
of
converter for continuous
and
discontinuous
current
If
wil.h
cO
ll
l
illUOIIS
t \lrrcnt (ú
::::
ú:J)
th
e Jiring angle is reduced by a small
1
1.11
Itlll
IIt
.
/
\(~,
1.1",
p()
:
l
il.
iv(
~
V()ltlLg<~
·
·
l.iTll(~
;tn'lt
, n
,..
"r <
7f,
is
illC1'ci\
se
d,
whik
tlw
1«'I'
,n
l
.i"
,'
v"IL
I
If'
,"
UIII<'
1\
,1'('11" /I •
T'
/I I 11' , i: i
I'('dll('('(\'
Wit,h
disc()J1I
.
iIJII()II
:
~
II
1
:\H
R.
Static
Converter as a Power
Actuator
for
DC
Drives
iI!
fi
f\
v v
~
10ms
1\
fi
fi
fifi
II
Fil!:.
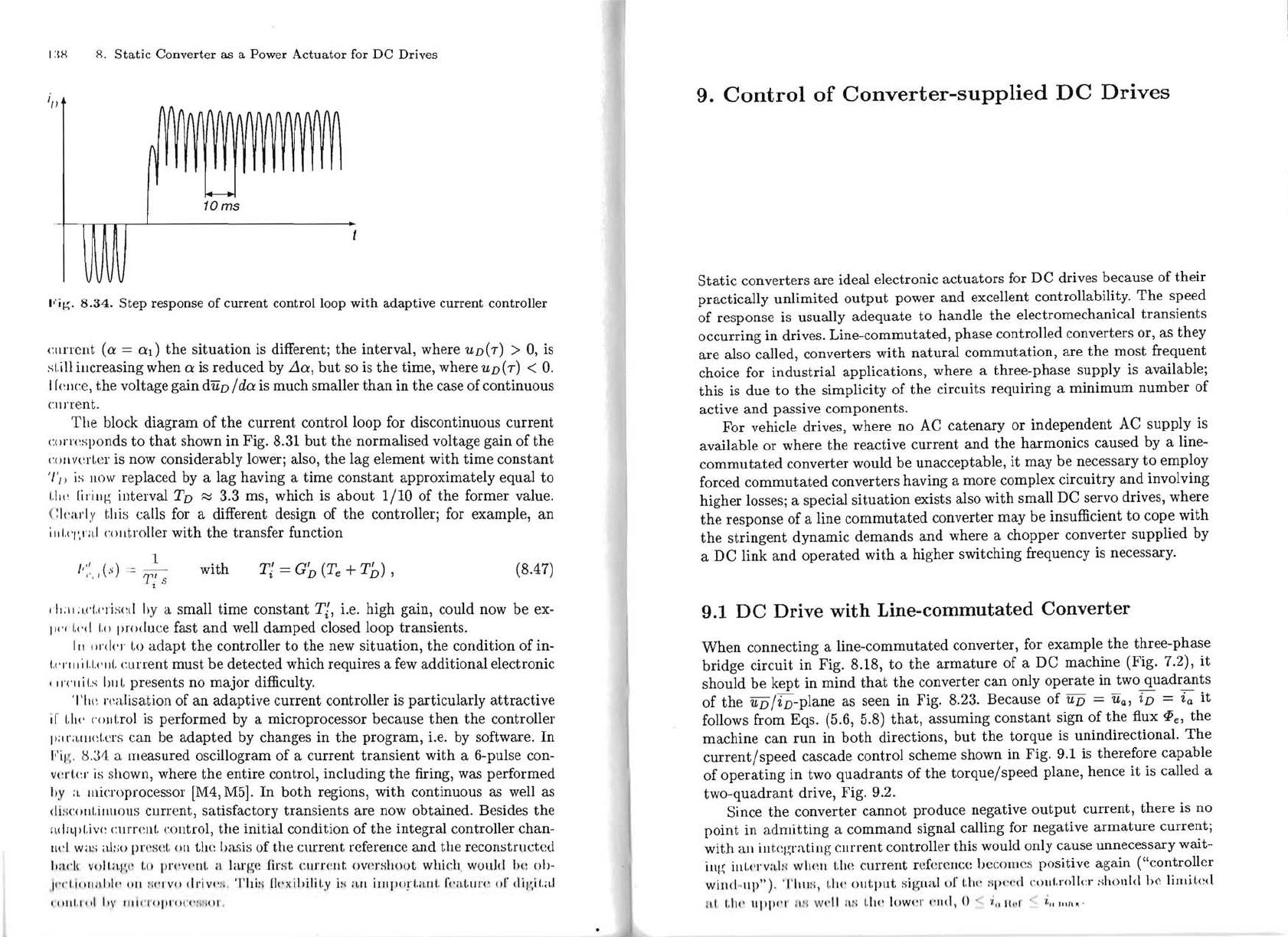
8.34.
Step
response
of
current
controlloop
with
adaptive
current
controller
CIlITCnt
(o:
= o:d
the
situation
is differentj
the
interval, where
UD(T)
>
O,
is
st.ill illcreasing when
o:
is reduced by
Llo:,
but
so
is
the
time, where
UD(T)
<
O.
I
ÍPJl
c:e
,
the
voltage gain dUD /
do:
is
much smaller
than
in
the
case of continuous
ClllT
ent.
The
block diagram of
the
current
control loop for discontinuous
current
colTesponds
to
that
shown in Fig. 8.31
but
the normalised voltage gain of
the
(·()Jlvcrt.
er is now considerably lowerj also,
the
lag element with time
constant
'/'i> is
ll
OW replaced by a lag having a time
constant
approximately equal
to
\.II<'
liliul-\
interval T
D
~
3.3 ms, which
is
about
l/lO
of
the
former value.
(
:I(
'arly
t.hi
s calls for a different design of
the
controllerj for example,
an
illl.(
'I',I:\1 colltroller with
the
transfer function
I
,'
,
(
...
)
1
with
Ti
=
G'o
(Te
+
T1)
,
(8.47)
.',' .
7."
i S
,ILII
:,('l.l'Iis
(,,1
hy a small
time
constant
TI,
i.e. high gain, could now be ex-
1>1'
11.""
1.,)
pr()duce fast
and
well
damped
closed loop transients.
III
md<T
t.o
adapt
the
controller
to
the new
situation,
the
condition of in-
1,
"I'IIIi1
.
I.(
'
IIt.
Cl.lrrent must
be
detected which requires a few additional electronic
, ,l'('lIil.s
IJIII.
presents no
major
difliculty.
'1'11('
, realisation of
an
adaptive
current
controller
is
particularly
attractive
ir
UI<'
('()ut.rol
is
performed by a microprocessor because
then
the
controller
II"
rallwt.ers
<.:an
be
adapted
by changes in
the
program,
i.e. by software.
ln
'ci
g,
1).
31 a measured oscillogram of a
current
transient
with a 6-pulse con-
vert.er
is
shown, where
the
entire control, including
the
firing, was performed
hy a llli(Toprocessor [M4, M5].
ln
both
regions,
with
continuous as well as
discolll.illllo
US
current, satisfactory transients are now obtained. Besides
the
n"il.pl.i
v
( ~
cmrcllt. control,
the
initial condition of
the
integral controller
chan
-
ud
\\'<1.
,';
,tI:
;
()
pr
\!
sd.
ou
th(~
lmsÍs of the current reference
and
the
reconstrud
ed
1';1d\ voll.al',"
Lo
IH'('Vl'lIl.
a Ial'ge [irs
\:
cl1rr(~I1t.
()v(~rsh()ot
which,
would
loe
oh-
i,','I,I
IIlI
l
d.l"
(III
1i
,'
I'
VII
dl'lv,':
: 'I'hi:; (I,'xil,ílil.,Y Ú, il.U
iIllporl
,1l.
nt.
kn.(,IIJ'(,
III'
dil
~
il,al
('
IHII,I,"
I
I)
\,
IIl1
j
' I
I'III'It(
" '
lh
,tll
"',
9.
Control
of
Converter-supplied
DC
Drives
Static
converters are ideal electronic
actuators
for
DC
drives because of
their
practically unlimited
output
power
and
excellent controllability.
The
speed
of response is usually
adequate
to
handle
the
electromechanical
transients
occurring in drives. Line-commutated, phase controlled converters or, as
they
are also called, converters with
natural
commutation,
are
the
most
frequent
choice for industrial applications, where a three-phase supply
is
availablej
this
is due
to
the
simplicity of
the
circuits requiring a
minimum
number
of
active
and
passive components.
For vehicle drives, where no
AC
catenary
or independent
AC
supply
is
available or where
the
reactive current
and
the
harmonics caused by a line-
commutated
converter would be unacceptable,
it
may
be necessary
to
employ
forced
commutated
converters having a more complex circuitry
and
involving
higher lossesj a special
situation
exists also with small DC servo drives, where
the
response of a line
commutated
converter
may
be insuflicient
to
cope with
the
stringent
dynamic
demands
and
where a chopper converter supplied by
a
DC
link
and
operated
with a higher switching frequency
is
necessary.
9.1
DC
Drive
with
Line-commutated
Converter
When
connecting a line-commutated converter, for example
the
three-phase
bridge circuit
in
Fig. 8.18,
to
the
armature
of a
DC
machine (Fig. 7.2),
it
should
be
kept
in
mind
that
the
converter
can
only
operate
in two
quadrants
of
the
uD/iD-plane
as seen in Fig. 8.23. Because
of
UD
= U
a
,
iD = ia
it
follows from Eqs. (5.6, 5.8)
that,
assuming
constant
sign of
the
flux
<Pe,
the
machine
can
run
in
both
directions,
but
the
torque
is unindirectional.
The
current/speed
cascade control scheme shown
in
Fig. 9.1
is
therefore capable
of
operating
in
two
quadrants
of
the
torque/speed
plane, hence
it
is
called a
two-quadrant
drive, Fig. 9.2.
Since
the
converter
cannot
produce negative
output
current,
there
is
no
point in
admitting
a
command
signal calling for negative
armature
currentj
with an illtegmting
cmrent
controller
this
would only cause unnecessary wait-
iHg
illL('l'vah
wll(
~
lI
L1w
current
rdcrcnce
becomcs positive again ("controllcr
wind
'
lIp")_
'1'1111
11
,
\.1)('
O\ltput
sig
llal
01'
\.III
: tip
l'
t'
d (:ollt.l'OlIer
shonld
be
limil.(~d
d,
\.III'
111'1"'1
'
j).
:1 w,'lI
l1
H
\.1)('
10\\"'1' ('
1111
,
()
. i"
11
'1
1 . i"
""
" .