Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

xV III
R L
(/)1~
m
R
· L
di
+
Ri
[!fi
~
!
=
dt
-
L%
U 2 + e =
'fi!
'fi2
u dt e
1
Ir
? o T
'1'1
t(
~
volt age arrowS indicating volt age sources (u,
e)
or volt age drops
(R
i,
L
~)
1('pl(
~
Se
nt
the
differences
of
electrical potential,
pointing
from
the
higher to
I
.
h(
~
lower assumed potential. Hence
the
volt ages in
any
closed mesh have zero
:: 1
1111
,
L:
u =
O.
Introduction
Energy is
the
basis
of
any technical
and
industrial
development. As long as
only
human
and
animal
labour
is available, a
main
prerequisite for social
progress
and
general welfare is lacking.
The
energy
consumption
per
capita
in a
country
is
thus
an
indicator
of
its
state
of
technical development, ex-
hibiting
differences
of
more
than
two orders of
magnitude
between highly
industrialised
and
not
yet developed countries.
ln
its
primary
form, energy is widely
distributed
(fossil
and
nuclear fuels,
hydro
and
tidal
energy, solar
and
wind energy,
geothermal
energy etc.),
but
it
must
be
developed
and
made
available
at
the
point
of
consumption in
suitable
form, for
instance
chemical, mechanical
or
thermal,
and
at
an
acceptable cost.
This
creates
problems
of
transporting
the
energy from
the
place
of
origin
to
the
point
of
demand
and
of
converting
it
into
its final physical formo
ln
many
cases, these problems
are
best
solved with
an
electrical
intermediate
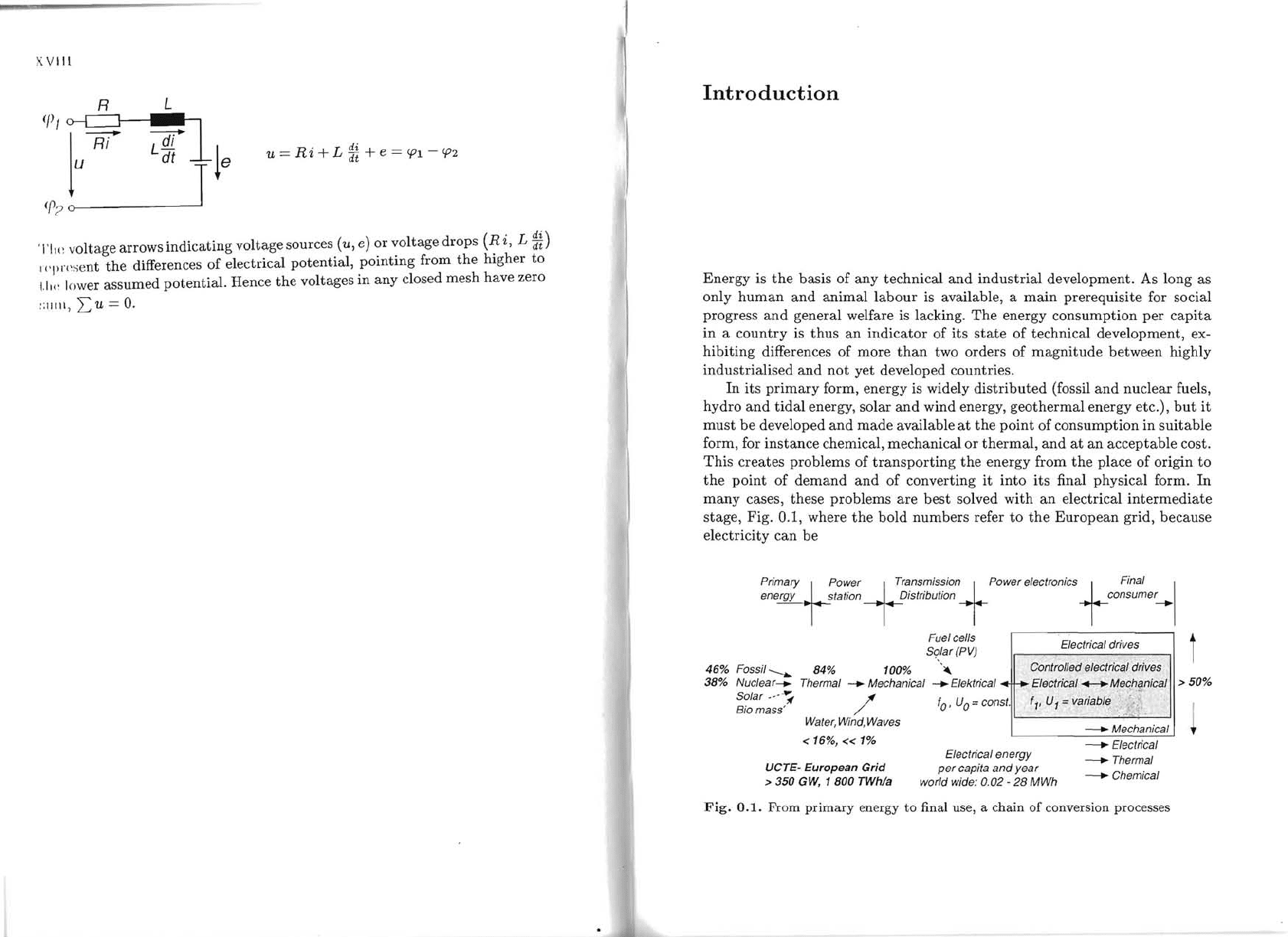
stage, Fig. 0.1, where
the
bold
numbers
refer
to
the
European
grid, because
electricity
can
be
pri7;{J
_.
;ower
------L
T;ansmiSSiOntPOWer
electronics+
Final I
ene~tat,on
T,stobuflon
consume~
Fuelcel/s
Electrical drives
Solar (PV)
i
46%
Fossil--..... 84% 100%
"~
Control/ad electrical árives
38%
Nuclear_
Thermal _ Mechanical
_Elektrical
f-
Elsctrical
.......
Mechênical
>50%
Solar
---
-
~
'o,Uo=con
'1'
UI
= variable
;.>,
.
Biomass
'
/
Water,
Wind, Waves
_ Mechanical
<
16%,«
1%
- Electrical
Electrical energy
_Thermal
UCTE-
European
Grid
per
capita
and
year
_Chemical
> 350
GW
, 1
800
TWh/a
world wide: 0.02 -
28
MWh
Fig
.
0.1.
From
primary
energy
to
final use, a c
hain
of
conversion processes
3
~
Introduction
•
~enerated
from
primary
energy
(chemical energy in fossil fuel,
potential
hydro energy, nuclear energy) in relatively efficient
generating
stations,
•
transported
with
low los ses over long distances
and
distributed
simply
and
at
acceptable
cost,
•
converted
into
any
final form
at
the
point
of
destination.
'I'his ftexibility is
unmatched
by
any
other
form
of
energy.
Of
particular
importance
is
the
mechanical form
of
energy which is needed
i
Il
widely varying power
ratings
wherever physical activities
take
place, involv-
ill~
the
transportation
of
goods
and
people
or
industrial
production
processes.
I,'or
this
final conversion
at
the
point
of
utilisation,
electromechanical devices
i
II
the
form
of
electrical
dri
ves
are
well suitedj
it
is
estimated,
that
about
half
I.he clectricity
generated
in
an
industrial
country
is eventually converted
to
Ill(
~
chanical
energy. Most electrical
motors
are
used
in
constant- speed drives
I.hat
do
not
need
to
be
controlled except for
starting,
stopping
or
protection,
1)11
t
there
is a smaller
portion,
where
torque
and
speed
must
be
matched
to
I.he need of
the
mechanical loadj
this
is
the
topic
of
this
book. Due
to
the
progr
ess
of
automation
and
with
a view
to
energy conservation,
the
need for
col1trol is likely
to
become
more
important
in
future. As
an
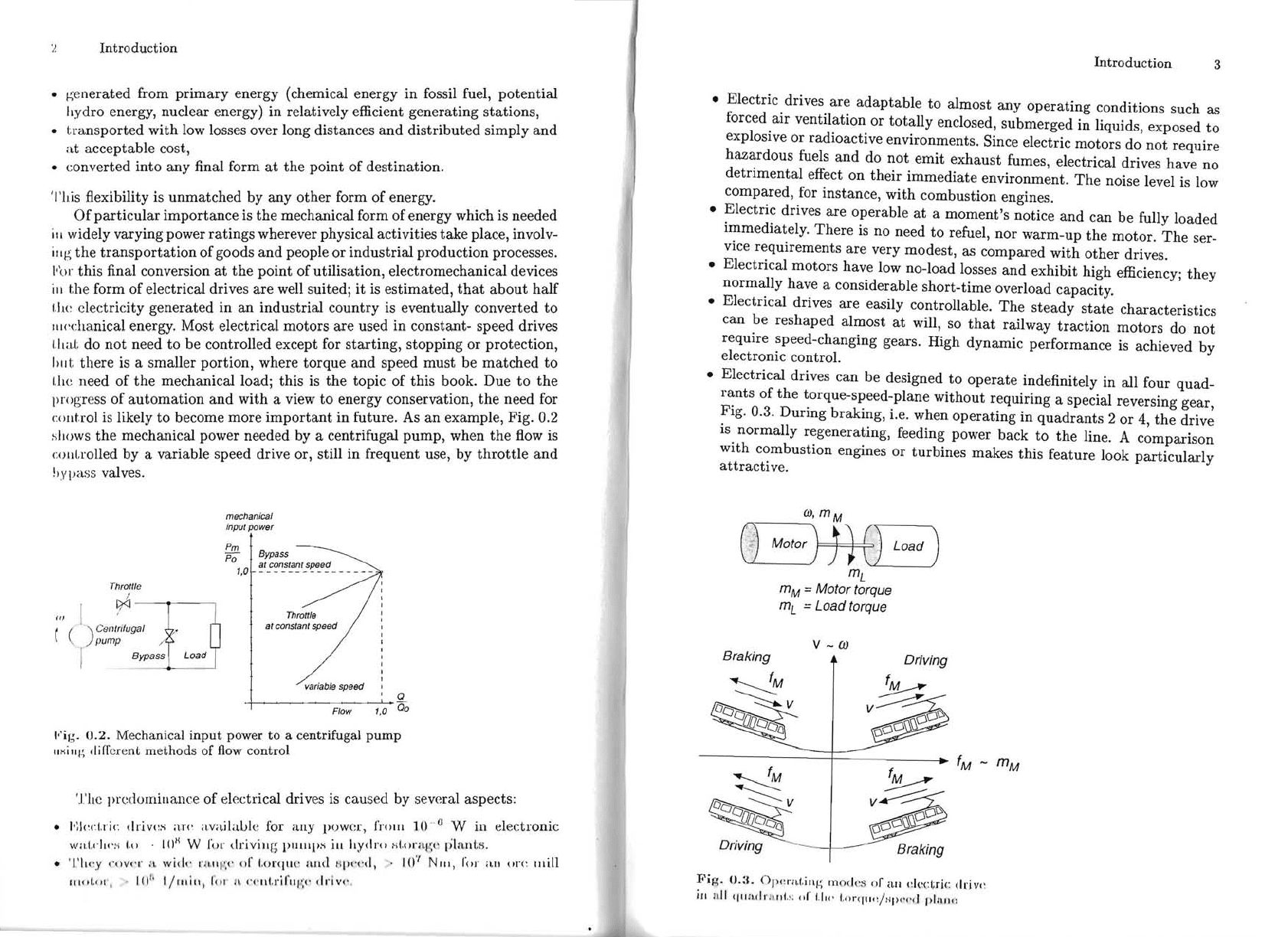
example, Fig. 0.2
~h()ws
the
mechanical power needed by a centrifugal
pump,
when
the
flow is
couLrolled
by
a variable speed drive or, still in frequent use, by
throttle
and
!)
.\'
pa
ss valves.
mecham
"
cal
input power
Pm
Po
lBypass
1,0
~t_c~,,!~ary_se,,-e~
__ ___ _
Throtlle
rt<í
'-
~--
-,
Thro",e
"I
l '
at
constant
speed
Centrifugai
3'
(
)
pump
I Bypass
Load
variabfe speed
, O
l-..
-
Flow
1,0
00
Fig.
0.2.
Mechanical
input
power
to
a centrifugai
pump
IIKill
g difrcre
nt
methods
of fiow
controi
'J'hc predomil1ance
of
electrical drives is caus
ed
by several aspects:
•
I':kdric
drlv(
~
s
aT<'
available for any power,
frOlIl
10°
W in electronic
wnt.(·II('
~i
1.0 I
()H
W for
drivill
~
plllllpS
iII
hydro
hl.orHI
~
t'
líl
nllt.f!,
•
'I'1L<
~
'y
e
nV
I'.' tL wid,'
rI
,W
I',C'
or
I.orqlll'
11.11(1
"p"('
d,
.
IO'f
NIII
, ror
il,\I
ore
IHill
lIud
,"
I' , •
10
)' '
/I
l1itr
, Cm li (·(·l1l.riflll( ·
driv(·
.
Introduction
• Electric drives
are
adaptable
to
almost
any
operating
conditions
such as
forced
air
ventilation
or
totally
enclosed,
submerged
in
liquids,
exposed
to
explosive
or
radioactive
environments. Since electric
motors
do
not
require
hazardous
fuels
and
do
not
emit
exhaust
fumes, electrical drives
have
no
detrimental
effect
on
their
immediate
environment.
The
noise leveI is low
compared,
for
instance,
with
combustion
engines.
• Electric drives
are
operable
at
a
moment's
notice
and
can
be
fully
loaded
immediately
.
There
is no need
to
refuel,
nor
warm-up
the
motor.
The
ser-
vice
requirements
are
very
modest,
as
compared
with
other
drives.
•
Electrical
motors
have low no-Ioad losses
and
exhibit
high efficiencYj
they
normally
have a considerable
short-time
overload capacity.
•
Electrical
drives
are
easily controllable.
The
steady
state
characteristics
can
be
reshaped
almost
at
will, so
that
railway
traction
motors
do
not
require speed-changing gears. High
dynamic
performance
is achieved by
electronic controI.
•
Electrical
drives can
be
designed
to
operate
indefinitely in alI four
quad-
rants
of
the
torque-speed-plane
without
requiring
a special reversing gear,
Fig
. 0.3.
During
braking,
i.e. when
operating
in
quadrants
2
or
4,
the
drive
is
normally
regenerating, feeding power
back
to
the
line. A
comparison
with
combustion
engines
or
turbines
makes
this
feature
look
particularly
attracti
ve.
W,
mM
(~
J
Motor)
))
()
Load)
m
L
mM
=
Motor
torque
mL =
Load
torque
V-úJ
-
mM
t
M
Fil';. ().:\.
0l"
~
ral.illg
mades of nll
d('ctric
drive:
iII
11
11
'f"il,c1
rr
,
"f.
,;
(lI'
1.11<'
l.
orqllc:j"pc
't
·
c1
plallCi

1
5
Introduction
•
The
rotational
symmetry
of
electrical machines
and
(with
most
motors)
the
smooth
torque
results in quiet operation with little vibrations. Since
there are no elevated
tem
per
atures causing
material
fatigue, long
operating
life
can
be
expected.
• Electrical motors
are
built
in a variety of designs
to
make
them
compatible
with
the
load;
they
may
be foot- or fiange-mounted,
or
the
motor
may
have
an
outer
rotor
etc. Machine-tools which formerly
had
a single drive
s
haft
and
complicated mechanical internal gearing can now
be
driven by
a
multitude
of individually controlled motors producing
the
mechanical
power exactly where, when
and
in
what
form
it
is needed.
This
has removed
constraints
from machine tool designers.
III
special cases, such as machine-tools
or
the
propulsion
of
tracked vehicles,
linear elec
tric
drives are also available.
I
Signallevel I Power levei
-+-
I
Voltages,
currents
Torque, acceleration, speed, angular position etc
~
Signal acquisition:
Reconstruction
of
unmeasurable quantities, A
Elimination
of
sensors
Contrai:
Oecoupling, feed - forward, limiting
Coordination:
Coordinate transformation
.c
.-=:
Identification:
Estimation
of
variable parameters
Se
lf
tuning:
Computer aided commissioning
~
A daptation: Adjustment
of
contrai parameters
Optimisation: Minimisation
of
objective functions
Fig.
0.4.
Digital control
structure
of an electrical drive
1\
s wou
lei
Iw
(
~x
p
c
cted
,
thi
s long list of rema
rk
a
lJl
e characteristics is
to
IH
'
:-;
lIppkllwllt
,
(~d
by
Ji
sa.
c1va.nta
ges
of
electric drives which lirnit or preclude
U1I·ir
11
S
C:
• 'I'1!t'.
dqH'lIdHII("(
' 011
it
C
OJlLiIlIIOll:-l
POW('I'
s
llpply
C'ill
lllP
S [)I·
..
hl
n
lll
!-J
witll
vdti
..
('
II'
!II'"p"I:
:
i<l11.
Ii
i
II"
I'''
WI
'I' r
1l.
il
UI'
(,id,
I'llilr
y lli
lI
,va
ll
nllk ,
/l
ll
I·
II'r(,rir
1:
1U
:
I'
J-(
Y
Il
ull
r
...
•
11.111
11
1.
I
...
' ·III' r l, ·.\.
""
1'''
.'\
1'<1,
whi<-h ln llil
il
r
dl
,Y
IlItll
lY. I
....
"
vy
n
llel
" XIH'Il-
n
tv"
(
11
1.0'
" 1"'" II,n
U.
'"
y,
I
<l
Ud
,IIII'. 1',I'III l h,
I,
, " w
il
.l, 1
111
" ,
ii
I.! 1'
,,"d'lI
nl.i'J!1 I·,III',h ...
'
Introdu
c
tion
or
turbine,
fuel-
or
solar cells).
The
lack
of
a suitable storage
battery
has
so far prevented
the
wide-spread use
of
electric vehicles.
The
weight
of
a
present
day
lead-acid
battery
is
about
50 times
that
of
a liquid fuel
tank
storing
equal energy, even when taking
the
low efficiency
of
the
combustion
engine into account.
• Due
to
the
magnetic
saturation
of
iron
and
cooling problems, electric mo-
tors
are
likely to have a lower power-to--weight
ratio
than,
for instance, high
pressure hydraulic drives
that
utilise
normal
instead
of
tangential
forces.
This is
of
importance
with servo drives on-board vehicles, e.g. for position-
ing
the
control surfaces of aircraft.
The
electromechanical energy conversion in controlled drives is
subject
to
the
terminal
quantities
of
the
electrical machine which can
be
changed
with
low losses by controllable power electronic converters consisting
of
semicon-
ductor
switches;
they
can produce voltages
and
currents
of
almost
any
wave-
form as prescribed by control which
today
is executed by microelectronic
components.
Thus
semiconductor technology, combining power conversion
and
high speed signal processing
at
reasonable cost, has been
the
essential
force
behind
the
development of todays high performance drives; this is
part
of
the
general
transition
from analogue
to
digital control systems using mi-
crocomputers
and
signalprocessors. Fig. 0.4 gives
an
impression
of
how
the
mechanical, power electronic
and
control functions, combining hardware
and
software, are interleaved in a
modern
drive system.

1.
Some
Elementary
Principies
of
Mechanics
Since electrical drives are linking mechanical
and
electrical engineering, let
us recall some basic laws
of
mechanics.
1.1
Newtons
Law
A mass M
is
assumed, moving
on
a
straight
horizontal
track
in
the
direction
of
the
s-axis,
Fig. 1.1 a. Let IM(t) be
the
driving force of
the
motor
in
the
direction of
the
velocity v and
h(t)
the
load force opposing
the
motion,
then
Newtons law holds
d dv
dM
1M
- h = -
(Mv)
= M - +
v-
(1.1)
dt dt
dt'
where
M v
is
the
mechanical
momentum.
Usually
the
forces are dependent on velocity v
and
position s, such as
gravitational
or frictional forces.
li
the
mass is constant, M =
Mo
= const., Eq. (1.1) is simplified,
dv
1M
- h =
Mo
dt ;
(1.2)
with
the
definition of velo city v = dsIdt,
this
results
in
a second
order
differ-
ential
equation
for
the
displacement,
(f(
&J
m,mM
t
M
M
s
V
/:
1
b
I"il
-';.
J
.1
. 'I
'n
.. ,
..
hd.;oll.d
Jl
llcl
""
U
LI.;oll
al
11101.;011
,
"r
IaIlIlP"cI
llm
..
;S('
~
9
~l
1.
Elementary
PrincipIes
of
Mechanics
d
2
s
(1.3)
f M -
!L
= Mo
dt
2
'
wh(
~
r
e
dv
d
2
s
a =
-=-
(1.4)
dt
dt
2
is
I.he
acceleration.
If
the
motion
is rotational, which
is
usualIy
the
case with
('h:cLrical drives, there are analogous equations, Fig.
1.1 b,
d dw
dJ
1I/.M
-
mL
=
dt
(Jw)
= J
dt
+ w
di
' (1.5)
wil.h
mM
being
the
driving-
and
mL
the
load
torque
. w =
21l"
n is
the
angular
vdocity, in
the
folIowing called speed. J
is
the
moment of
inertia
of
the
1'(
d.:d:iIlg
mass
about
the
axis of rotation, J w
is
the
angular
momentum.
The
1,'1'111 w
(dJ
/ dt)
is
of significance with variable
inertia
drives such as centrifuges
01'
n
:e
ling drives, where
the
geometry
of
the load depends on speed or time, or
illdll
st
ri
al
robots
with changing geometry.
ln
most
cases however,
the
inertia
C;
lJI
ue assumed to be constant, J = J
o
= const., hence
dw
mM
-
mL
= J
o
di
. (1.6)
Wit.h
E the angle of
rotation
and w =
dE
/
dt
the
angular
velocity,
we
have
d
2
E
'
II/.M
-
mL
= J
o
dt
2
'
(1.7)
wh('n~
(lw
d
2
E
( r
(1.8)
(ft
dt
2
'
i::
Ih(
'
;\.I1i
~
\Ilar
acceleration.
II.
~;
II()\Ild
be noted
that
mM
is
the
internal or electrical motor torque,
not
id(
'lllical with
the
torque
available
at
the
motor
shaft.
The
difference between
i
111"rllal
torque
and
shaft
torque
is
the
torque
required for accelerating
the
il
...
rlia
of
Lhe
motor
itself
and
overcoming
the
internal friction
torque
of
the
III<
1101'.
'
I'r
ansla
ti
onal and
rotational
motions are often combined, for example in
v(:hich~
propulsion, elevator- or rolling mill-drives. Fig. 1.2 shows a mechanical
II1
0
dd
, where a con
st
ant
mass M
is
moved with a rope
and
pulIey; when
1I<'I'
,kct.iIlg the mass of
the
pulley and with
'
/lI
' M =
'/'
fM
,
mL
= r
fL
und
v =
rw
\V('
Jiud wilh M = cons
to
a z dw
'
II/.M
1/I.
J.
'/' (M'II) = M
l'
- .
(1.9)
di, di.
./,.
1\'/
.,.:'
1'1'111'1':
:
"111
.:
:
til,'
('
qllivilklll.
1110111('111.
"r
illl'l'lin,
01'
I.h,'
liI)(
:
arly
UIO
V
illl
.
~
rtllI
)I
:
:,
l',·t'<-n
:,'d 1." 1,1
...
I
l.
x i
ll
(Ir
U",
plIlI,
'y
.
"I'P
'
""III.I
V 1.1 ...
111:1
::
::
f\;1
(
'a
,
1I
II<:
1.1I<1I1J
·,.
hl
. "I
/i')
1,
,,1.1(
' ,[
j,
iI,!
11
1111.,
'"
"
I""
r~
1.11"
, ll'('lIlId""'
1I1
(I
"I"!.II<'
\\,11<'1,1
:,
1.2 Moment
of
Inertia
G
t
M
/ t
L
/
"'I
.((
\)
..
LM - ---=--. (
vr
M
'
úJ
m
L
'~r
-"'r
---.
v
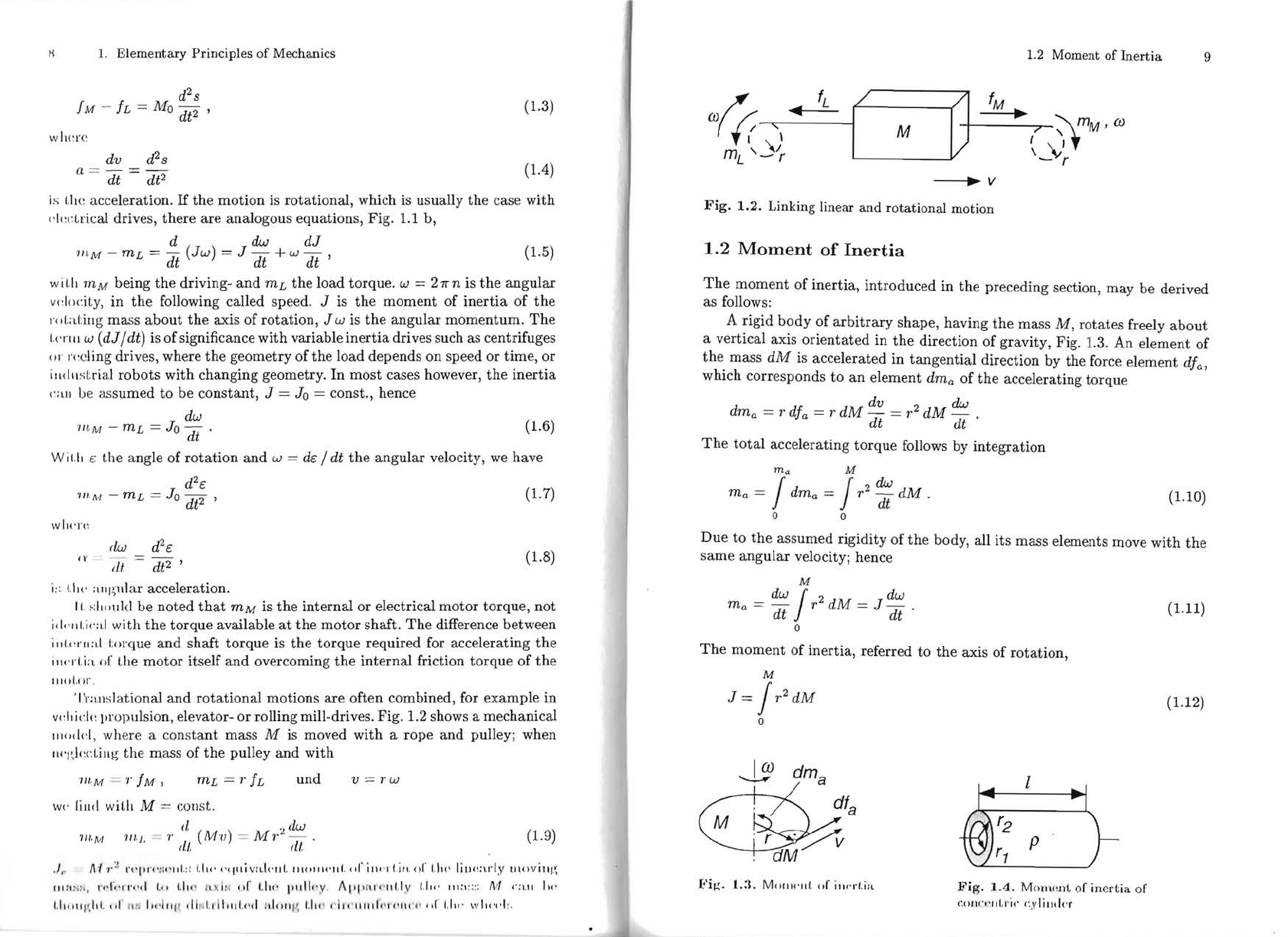
Fig.
1.2.
Linking linear
and
rotational
motion
1.2
Moment
or
Inertia
The
moment
of inertia, introduced in
the
preceding section,
may
be derived
as follows:
A rigid
body
of
arbitrary
shape, having
the
mass
M,
rotates freely
about
a vertical axis
orientated
in
the
direction of gravity, Fig. 1.3. An element of
the
mass
dM
is
accelerated in
tangential
direction by the force element dfa,
which corresponds
to
an
element
dma
of
the
accelerating torque
dv
dw
dm
=
l'
d+
= l'
dM
- =
'1'2
dM
- .
a
~
a
dt
dt
The
total
accelerating
torque
follows by integration
ma
M
ma
= j
dma
= j
'1'2
~
dM
.
(1.10)
O O
Due
to
the
assumed rigidity of
the
body, alI
its
mass elements move with
the
sarne
angular
velocity; hence
M
=
dWj
2dM=Jdw
ma
dt
r
dt
.
(LU)
o
The
moment
of inertia, referred to
the
axis of
rotation,
M
J = j r
2
dM
(1.12)
o
~
dm
. a
I
'2
p
'1
Fig.
1.3.
M
II
IIII·/I1.
"r
ill
....
l.
ia
Fig.
1.4
. MCl\wlni of ine
rtia
of
cOIlc<·"Ll'i('
(
·.
'ylilHlcr
- 2008 — 2024 «СтудМед»