Agoston M.K. Computer Graphics and Geometric Modelling: Implementation and Algorithms
Подождите немного. Документ загружается.

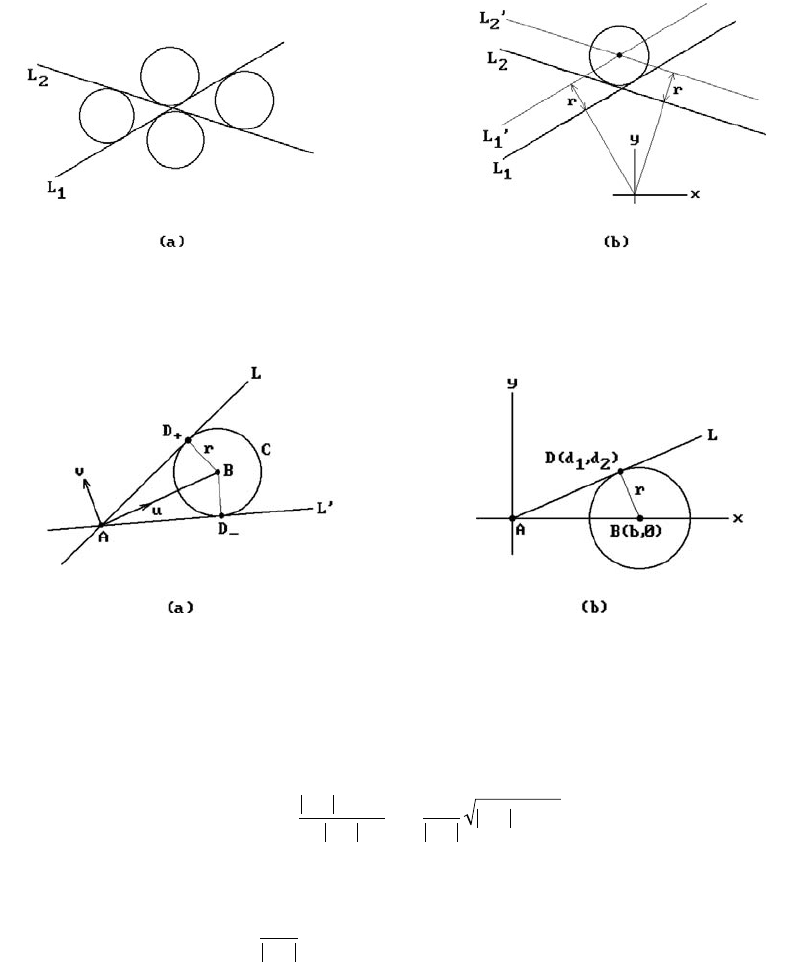
6.8.3 Formula. Let A be a point and C a circle with center B and radius r. Assume
that |AB|>r. There are two lines through A that are tangent to C and they intersect
C in the points D
±
defined by
where u and v are the orthonormal vectors
Proof. Figure 6.22(a) shows the two lines L and L¢ that pass through A and are
tangent to C. By switching to the coordinate system defined by the frame (A,u,v) we
may assume that A = (0,0) and B = (b,0). Let D = (d
1
,d
2
). See Figure 6.22(b). The fol-
lowing equations are satisfied by D:
u
AB
AB
v==
()
=-
()
u u and u u
12 21
,,.
DA
AB
AB
u
AB
AB v
±
=+
-
±-
2
2
2
2
rr
r,
6.8 Circle Formulas 255
Figure 6.21. Circles of fixed radius tangent to two lines.
Figure 6.22. Lines through a point tangent to a circle.
In other words,
If follows that
Since b corresponds to |AB| in the original problem, our solution translates into the
stated one in world coordinates.
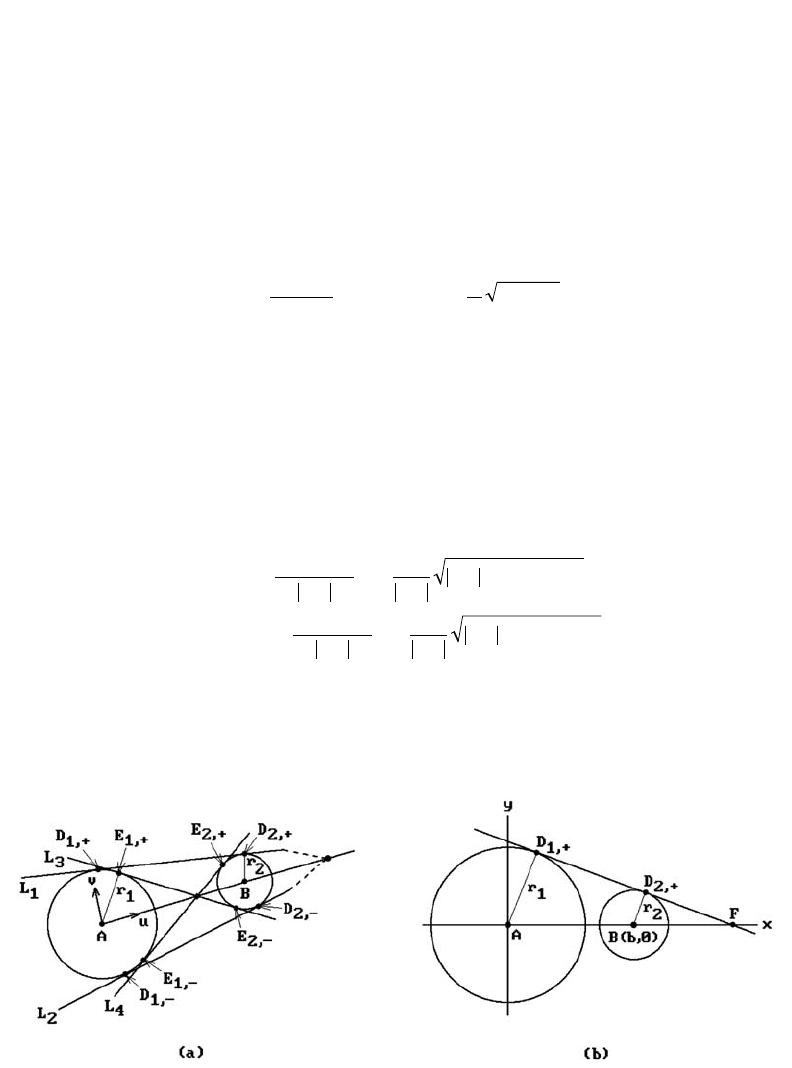
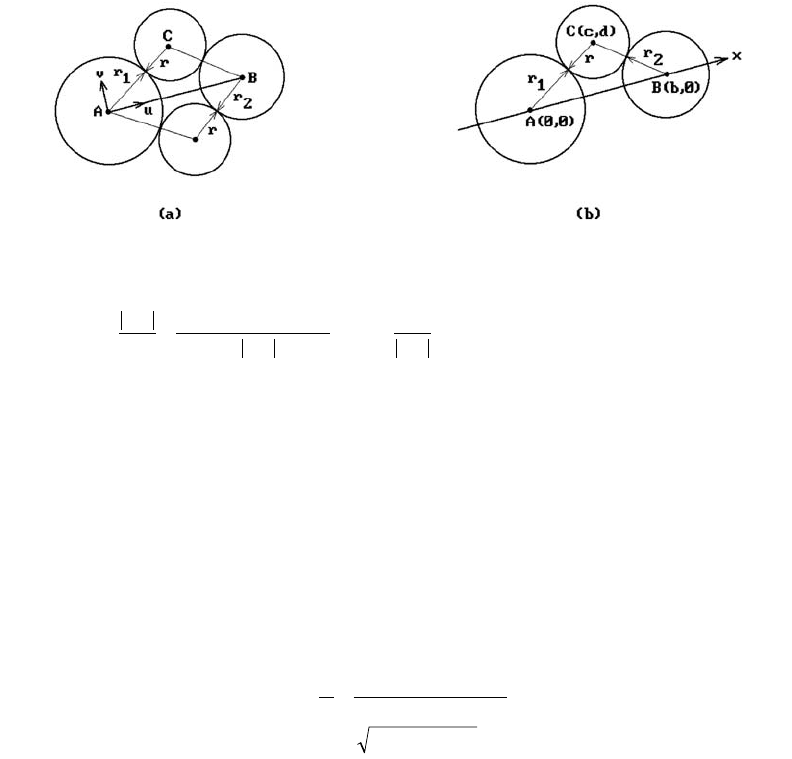
6.8.4 Formula. Consider two circles in the plane centered at points A and B with
radii r
1
and r
2
, respectively. Assume that |AB|>r
1
+ r
2
and r
1
> r
2
. Let D
i,±
and E
i,±
be
the points where the four lines L
i
that are tangent to both of these circles intersect
the circles. See Figure 6.23(a). Then
where A
1
= A, A
2
= B, e
1
=+1, e
2
=-1, and u and v are the orthonormal vectors
DA
AB
u
AB
AB v
EA
AB
u
AB
AB v
ii
ii
iii
ii
rr r r
rr
rr r r
rr
,
,
,
,
±
±
=+
-
()
±--
()
=+
+
()
±-+
()
12
2
12
2
12
2
12
2
e
d
br
b
and d
r
b
br
1
22
2
22
=
-
=± - .
db d r
dd b d
1
2
2
2
2
11 2
2
0
-
()
+=
-
()
+=.
BD • BD
D•BD
=
=
r
2
0.
256 6 Basic Geometric Modeling Tools
Figure 6.23. Lines tangent to two circles.
Proof. Note that the associated pairs of lines (L
1
,L
2
) and (L
3
,L
4
) intersect on the line
through the points A and B. We again switch to the coordinate system defined by the
frame (A,u,v) and assume that A = (0,0) and B = (b,0), b > 0. See Figure 6.23(b). Let
F = A + sAB be the point where L
1
intersects the x-axis. Then
(6.38)
Because the triangles ADF and BEF are similar, we get that
(6.39)
Case 1: s > 1. In this case equation (6.39) implies that
Case 2: 0 < s < 1. In this case equation (6.38) implies that
In either case, since we now know F, we can now use Formula 6.8.3 to compute
D
i,±
and E
i,±
. For example, in Case 1,
Note that to use Formula 6.8.3 we must use the frame (F,-u,v). It is now a simple
matter to rewrite this formula in the form stated earlier.
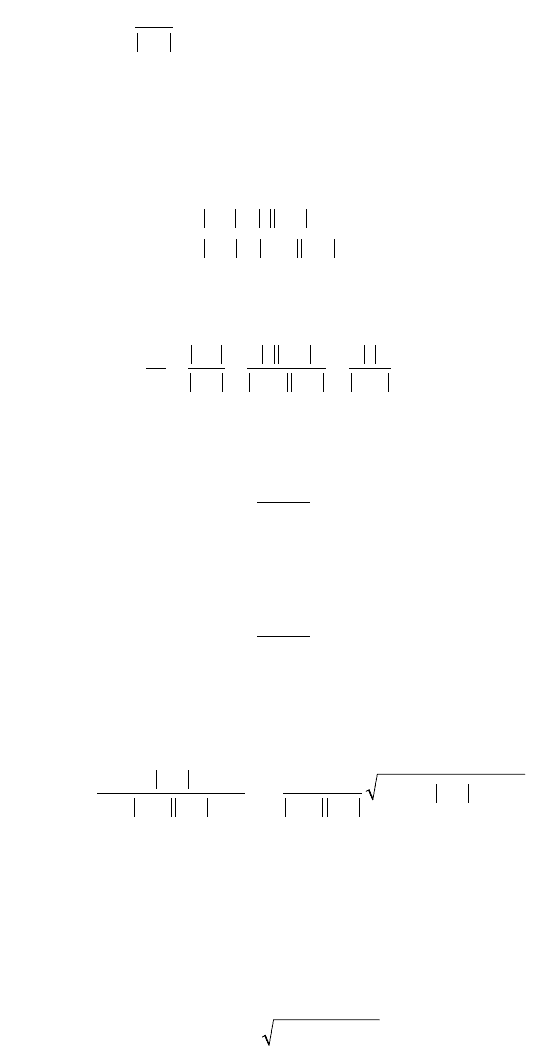
6.8.5 Formula. Consider two circles in the plane centered at points A and B with
radii r
1
and r
2
, respectively. Assume that r
1
+ r
2
<|AB|<r
1
+ r
2
+ 2r. The circles of
radius r that are tangent to these circles have center C defined by
where
CA u v=+ ± +
()
-erre
1
2
2
,
DF
AB
AB
u
AB
AB v
2
22
2
2
2
22
2
2
1
11
1
,
.
±
=-
-
()
-
-
±
-
-
()
-
sr
s
r
s
sr
s
r
rr
=
+
1
12
.
s
r
rr
=
-
1
12
.
r
r
s
s
s
s
1
2
11
==
-
=
-
AF
BF
AB
AB
.
AF AB
BF AB
=
=-
s
s1 .
u
AB
AB
v==
()
=-
()
u u and u u
12 21
,,.
6.8 Circle Formulas 257
Proof. We can see from Figure 6.24(a) that there are precisely two circles of radius
r which are tangent to both circles. What we have to do is find the intersection of
two circles: one has center A and radius r
1
+ r and the other has center B and radius
r
2
+ r.
We switch to the coordinate system defined by the frame (A,u,v). Let A = (0,0) and
B = (b,0). See Figure 6.24(b). We must solve the equations
We get that
This translates to the desired formula in world coordinates since b corresponds to
|AB|.
This concludes our list of formulas involving circles. Other formulas can be found
in [Chas78] and [BowW83].
6.9 Parametric or Implicit: Which Is Better?
Two of the most common ways to present a geometric object X is via a parameteri-
zation or implicitly as the zeros of an equation. It is natural to ask which is better.
The advantages and disadvantages of these two representations are seen best in the
context of the following two tasks:
x
brr rr
b
yrrx
=+
+
()
-+
()
=± +
()
-
22
1
2
2
2
1
2
2
.
xy rr
xb y r r
22
1
2
2
2
2
2
+=+
()
-
()
+=+
()
.
e
rr rr
u u and u u=+
+
()
-+
()
==
()
=-
()
AB
AB
u
AB
AB
v
22
1
2
2
2
12 21
,,, ,.
258 6 Basic Geometric Modeling Tools
Figure 6.24. Circles of fixed radius tangent to two circles.

Task 1: Generate some points that belong to X.
Task 2: Determine if a point q belongs to X.
Assume that X Õ R
n
. Suppose that
(6.40)
is a parameterization of X, where A Õ R
k
. Suppose also that
(6.41)
where f: R
n
Æ R.
Advantage of a parameterization: Task 1 is easy because all one has to do
is to evaluate the function p in (6.40) at
different values.
Disadvantage of a parameterization: Task 2 is hard because one has to find a
value t that satisfies the equation p (t) = q.
Advantage of an implicit definition: Task 2 is easy because all one has to do
is check if f(q) = 0 for the f in equation
(6.41).
Disadvantage of an implicit definition: Task 1 is hard because one has to find
values q for which f(q) = 0. Solving
equations is usually not easy.
Since both Tasks 1 and 2 are usually handy to be able to carry out in a modeler, it would
be nice if one could maintain both a parametric and an implicit representation for an
object. The implicit function theorem implies that locally a smooth manifold in R
n
has
both a parametric and implicit representation, at least in terms of C
•
functions. On the
other hand, in computer graphics, for computability reasons, one prefers polynomial
functions (sometimes rational functions are acceptable) and then the question
becomes harder. With the exception of a few well-known spaces, such as conics, finding
such representations is difficult in general and falls into the domain of algebraic geom-
etry. See Chapter 10 in [AgoM05] for some answers to the question of how one can
convert from parameterizations to implicit representations and vice versa.
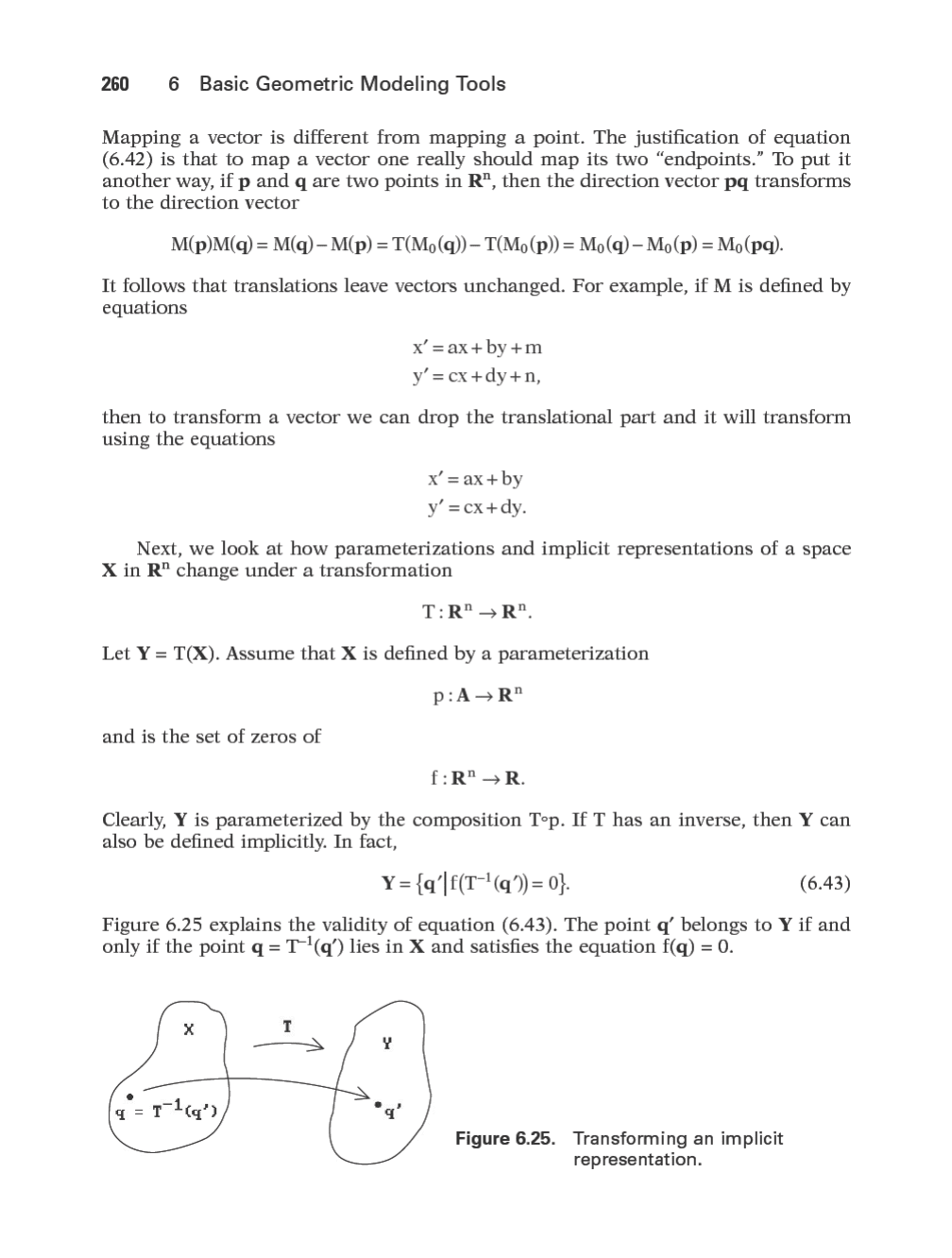
6.10 Transforming Entities
This section makes two simple but useful observations about transformations. The
first has to do with how vectors transform.
Let M: R
n
Æ R
n
be an affine map. The map M can be written uniquely in the form
M = TM
0
, where T is a translation and M
0
is linear transformation with M
0
(0) = 0. Let
v ΠR
n
, where we think of v as a vector. Let v¢ be the vector to which v is transformed
by the map M. Then
(6.42)
v v not v¢=
() ()()
MM
0
.
Xqq=
()
=
{}
f0,
p:AXÆ
6.10 Transforming Entities 259
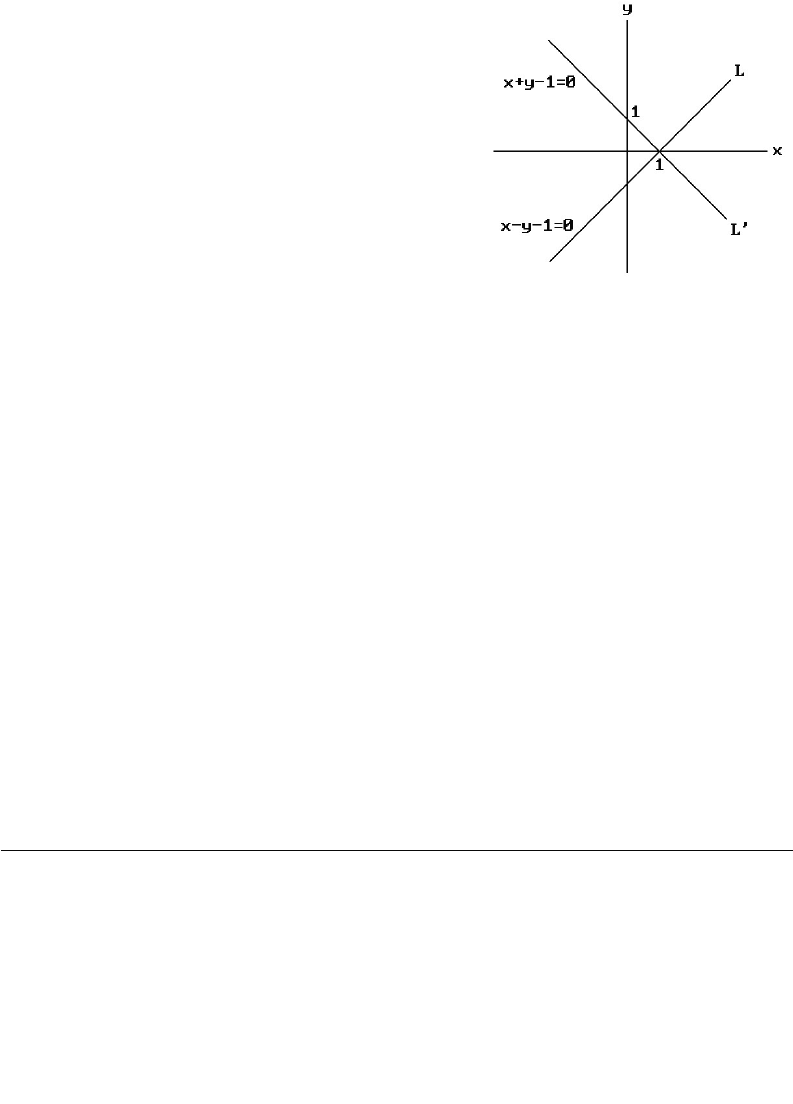
6.10.1 Example. Let L be the line in the plane defined by
(6.44)
and let T be the rotation about the origin through the angle of ninety degrees. The
equations for T and T
-1
are
If L¢=T (L), then from what we just said above, the equation for L¢ is gotten from
equation (6.44) by substituting y and -x for x and y, respectively. This gives
(6.45)
That this is the correct answer can easily be checked. See Figure 6.26. Simply take
two points on L and find the equation of the line through the image of these two points
under T. For example, the points (0,-1) and (1,0) map to (1,0) and (0,1), respectively,
and equation (6.45) contains these two points.
6.11 EXERCISES
Section 6.5
6.5.1 Find the intersection of the segments [(2,1),(6,-2)] and [(-1,-3),(7,1)].
6.5.2 Find a formula for the intersection of a ray with a segment in the plane.
6.5.3 Find the intersection of the line L defined by
xt
yt
zt
=+
=
=- +
2
3
52
yx xy--
()
-=+-=110
Tx y T x y
yx y x
::
.
¢=- ¢=
¢= ¢=-
-1
xy--=10
6.11 Exercises 261
Figure 6.26. Transforming a line.
and the plane X with equation x + y - z = 2.
6.5.4 Find all intersections of the ray starting at the point p = (2,1) and direction vector
v = (1,-3) with the circle defined by x
2
- 2x + y
2
= 0.
Section 6.6
6.6.1 Prove equation (6.19).
6.6.2 Prove Formula 6.6.2.
Section 6.7
6.7.1 Show that Formula 6.7.4 works for nonconvex polygons.
Section 6.8
6.8.1 Find the equation of the circle through the points p
1
= (2,1), p
2
= (3,3), and p
3
= (7,1).
Section 6.10
6.10.1 Find the equation of the parabola y = x
2
after it is rotated about the origin through an
angle of p/3.
6.12 PROGRAMMING PROJECTS
Section 6.5
6.5.1 Two-dimensional ray tracing
This project involves implementing a simple 2d ray-tracing program. Create the following
submenu for your main program
262 6 Basic Geometric Modeling Tools
When the user enters this menu, he/she should be presented with a view looking orthogonally
down on the plane. Then the menu items should cause the following actions to be taken when
activated:

Start Pt: This should let the user to graphically pick a point p on the screen.
Direction: This should ask the user for an angle q.
Start: This should start drawing the ray from p in the direction defined by q. The ray
should continue, reflecting off of any polygonal curves and circles in the world,
until the user presses a key. If a ray does not meet any object, that is, it is about
to escape to “infinity,” draw a short segment in that direction and then stop after
telling the user what has happened. Alternatively, rather than waiting for a key to
be pressed ask for a number k and quit drawing the ray after k reflections.
Be sure to include a delay each time the ray hits an object so that one can
watch the ray trace out its path in the world. Without this, the whole process will
happen so fast that one would only see a “final” picture.
Example: This would display a sample world of objects for the user to use in this ray tracing
exercise.
An additional nice option in your program would be to allow the user to create his/her own
world of circles and closed or open polygons in the plane.
6.12 Programming Projects 263