Agoston M.K. Computer Graphics and Geometric Modelling: Implementation and Algorithms
Подождите немного. Документ загружается.

number of pixels) but can simply recompute the curve using the moved “control
data.”
No real constraints were placed on the basis functions above. However, in later
sections on Bézier curves and B-splines we shall see the usefulness of the following
properties:
(1) The functions should be nonnegative.
(2) The functions corresponding to point data should sum to 1.
(3) The functions should have compact support.
Properties (1) and (2) would imply that the curve lies in the convex hull of its control
points and property (3) essentially means that if a control point is moved only the
curve near that point changes. Properties (1)–(3) basically mean that the functions
form a partition of unity.
11.2.3 Spline Interpolation
The interpolation problems described in the last section and the functions that solve
them can be generalized.
Definition. A spline of degree m and order m + 1 is a function S : [a,b] Æ R for which
there exist real numbers x
i
, i = 0,..., n, with a = x
0
£ x
1
£ ...£ x
n
= b, so that
(1) S is a polynomial of degree £ m on [x
i
,x
i+1
], for i = 0,..., n - 1, and
(2) S is a C
m-1
function.
The x
i
are called knots and (x
0
,x
1
,...,x
n
) is called the knot vector of length n + 1 for
the spline. The intervals [x
i
,x
i+1
] are called spans. If a knot x
i
satisfies x
i-1
< x
i
= x
i+1
=
...= x
i+d-1
< x
i+d
(x
-1
=-•and x
n+1
=+•), then x
i
is said to be a knot of multiplicity d.
S is called a linear, quadratic, or cubic spline if it has degree 1, 2, or 3, respectively.
Note. One allows a =-•and/or b =+•in the definition of a spline. Only finite x
i
are called knots, however.
If one had to list the key terms that should always be intimately associated with
the concept of spline they would be “piecewise polynomial function,” “knots,” and
“differentiability.” Note that splines are more than just piecewise polynomials because
they satisfy a global differentiability condition. The piecewise Hermite interpolation
function described in the last section was not smooth enough to be called a cubic
spline.
The physical definition of a spline. A spline is a thin metal or wooden strip that
is bent elastically so as to pass through certain points of constraint.
Physical splines have been used for ages. For example, in the construction of ships’
hulls, the hull was modeled at full or nearly full size on a wooden floor in the “mold’s
loft.” This task, called “lofting,” was carried out by skilled “loftsmen” using such phys-
ical splines. When one tries to determine a mathematical description of the curves
generated by physical splines, one discovers something very interesting. Physics tells
11.2 Early Historical Developments 387

us that the strip will assume a shape that minimizes the strain. The equation for this
minimum energy problem is difficult to solve directly, however, an approximation to
it can be solved and leads to a solution that is a cubic spline. We shall explain this a
little more in Section 11.6. At any rate, it is this ability of cubic splines to model curves
from physical splines, plus the fact that their low degree makes them easy to compute,
that makes them the most popular spline by far.
The spline interpolation problem: Given an integer k and real numbers x
i
and y
i
, i = 0,
..., n, with x
0
< x
1
< ...< x
n
, find a spline g(x) of order k so that the x
i
are the knots for g
and g(x
i
) = y
i
.
11.2.3.1 Theorem. The spline interpolation problem has a solution.
Proof. For a general solution see [BaBB87] or [deBo78]. One can also prove this
using B-splines, which are discussed later. See [RogA90]. Here we shall only show the
existence of a solution in the important special case of a cubic spline. We rephrase
the problem as follows: Given points (x
0
,y
0
), (x
1
,y
1
),..., and (x
n
,y
n
), find cubic poly-
nomials p
i
(x), so that for i = 0,1,..., n - 1,
and for i = 1,2,..., n - 1,
In this situation we have 4n degrees of freedom and only 4n - 2 constraints. The two
extra degrees of freedom can be handled in several ways depending on how we choose
to specify m
0
and m
n
, the slope at the beginning and end of the spline, respectively.
We mention four approaches, but there are others.
End condition choices for interpolating splines:
(1) (Clamped end condition) We can specify the slopes m
0
and m
n
explicitly.
(2) (Bessel end condition) We can let m
0
and m
n
be the end slope of the interpo-
lating parabola for the first, respectively, last three data points.
(3) (Natural end condition) We can require that the second derivative of the spline
vanishes at the ends. This amounts to requiring zero curvature of the spline at the
ends and is closer to what happens in the case of a physical spline. The spline will act
like a straight line near its endpoints. This type of spline is called a natural spline.
(4) (Periodic end condition) We require that the value of the spline and the value
of its first and second derivative are the same at both endpoints. This is of interest
mainly in the context of closed spline curves.
In the first approach we are obligated to specify the end conditions ourselves, whereas
in the other approaches it is done automatically for us. No matter what choice we
¢
()
=¢
()
¢¢
()
=¢¢
()
-
-
px p x
px p x
ii i i
ii i i
1
1
,
.
px y
px y
ii i
ii i
()
=
()
=
++
,
,
11
388 11 Curves in Computer Graphics

make it will definitely influence the curve. As an example, consider the first three
approaches in the context of a uniformly spaced spline curve that interpolates points
on an arc of a circle (we shall show how our results about spline functions applies
to spline curves shortly). One would like the curvature of the curve to be approxi-
mately constant since that holds for the circle. What one finds is the following (see
[Fari97]): With the correct choice of start and end tangents, the clamped end condi-
tion approach has the best curvatures, the Bessel end condition approach is the next
best, and the natural end condition approach is the worst because it forces the biggest
deviations from constant curvature near the endpoints.
For more on spline interpolation see [Beac91], [Fari97], or [RogA90]. Here we
only sketch the solution to the spline interpolation problem for clamped end
conditions.
Let us assume for the moment that we know the slopes m
i
= p
i
¢(x
i
) for i = 1,2,
..., n - 1. Assume further that we also know the slopes m
0
and m
n
at x
0
and x
n
, respec-
tively. Because the slopes are known, equation (11.21) defines the polynomials p
i
(x).
A simple computation using equation (11.21) shows that
where Dx
i
= x
i+1
- x
i
, and Dy
i
= y
i+1
- y
i
. Setting p
i
≤(x
i
) equal to p
i-1
≤(x
i
) leads to the
equation
for i = 0,1,..., n - 1, where d
i
= 1/Dx
i
. The matrix form of this system of equations is
(11.30)
where S
n
is the (n - 1) ¥ (n - 1) matrix
(11.31)
S
n
n
nn n
nnn
=
+
()
+
()
+
()
+
()
+
()
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
-
-- -
---
2000
200
02 00
000 0
0002
000 2
01 1
1122
223
3
32 2
221
dd d
dddd
ddd
d
dd d
ddd
...
...
...
. . . ... . .
. . . ... . .
...
...
...
ÁÁ
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
˜
˜
˜
.
S
m
m
m
m
yym
yy
yy
yy
n
n
n
n
n
n
n
n
n
n
1
2
2
1
0
2
0
1
2
100
1
2
1
2
2
2
3
2
3
2
2
2
2
2
2
1
2
3
3
3
3
.
.
.
.
-
-
-
-
-
-
-
-
-
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
=
+
()
-
+
()
+
()
+
dd d
dd
dd
dd
DD
DD
DD
DD
nnn
m
--
()
-
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
11
d
,
dddddd
ii i iiii
i
i
i
i
mmmyy
-- - +
-
-
++
()
+= +
()
11 1 1
1
2
1
2
23DD,
¢¢
()
=
+
()
-
-
()
+
-+
()
++
px
xm m y
x
xx
yxmm
x
i
ii i i
i
i
iiii
i
6
2
2
32
1
3
1
2
DD
D
DD
D
,
11.2 Early Historical Developments 389

The tridiagonal symmetric matrix S
n
has all positive entries and is diagonally domi-
nant, which implies that it has an inverse. In other words, there is a solution to the
cubic spline interpolation problem and this solution is unique. The tridiagonal nature
of the matrix means that the system of equations can be solved very efficiently. One
needs only one forward substitution sweep (row operations starting from the top,
which eliminate the elements below the diagonal and change the diagonal elements to
1) and then one backward substitution sweep starting from the bottom. See [ConD72].
Finally, let us translate the above results to interpolating points in R
m
with a para-
metric curve. Suppose that we are given distinct real numbers u
0
, u
1
,..., u
n
and
points p
0
, p
1
,..., p
n
in R
m
, then there is a unique cubic spline p : [u
0
,u
n
] Æ R
m
sat-
isfying p(u
i
) = p
i
. The individual cubic curves that make up p(u) are defined by equa-
tion (11.25). All that is needed is to find the tangent vectors v
i
at the points p(u
i
). Let
Then equation (11.30) becomes
(11.32)
The v
i
are solved for using this equation. The uniform spline case where u
i+1
- u
i
= 1
is of special interest. In that case we need to solve the following system:
(11.33)
Section 11.5.5 will look at another solution to the spline interpolation problem.
11.3 Cubic Curves
Cubic curves are the most popular in graphics because, as indicated earlier, the degree
is high enough for them to be able to satisfy the typical constraints one wants and yet
410 000
141 000
000 141
000 014
3
1
2
2
1
20 0
...
...
.........
... ...
.........
...
...
.
.
.
O
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
˜
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
˜
=
-
()
-
-
-
v
v
v
v
pp v
n
n
33
3
3
31
13
2
pp
pp
pp v
-
()
-
()
-
()
-
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
˜
--
-
.
.
.
nn
nn n
S
n
n
n
n
n
n
n
n
n
n
v
v
v
v
ppv
pp
pp
pp
1
2
2
1
0
2
0
1
2
100
1
2
1
2
2
2
3
2
3
2
2
2
2
2
2
1
2
3
3
3
3
.
.
.
.
-
-
-
-
-
-
-
-
-
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
=
+
()
-
+
()
+
()
+
dd d
dd
dd
dd
DD
DD
DD
DD
nnn--
()
-
Ê
Ë
Á
Á
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
˜
˜
11
d v
Dpp p
ii i i
ii
and
uu
=- =
-
+
+
1
1
1
d .
390 11 Curves in Computer Graphics

they are easy to compute. For that reason it is worthwhile to collect together in one
place some facts about them. The emphasis in this section will be on their basic matrix
representation and how it can be used to analyze the curves. Additional matrix rep-
resentations will be encountered in the sections on Bézier curves and B-splines. We
should point out though that matrix representations are not always the fastest or the
most numerically stable representations. See Section 11.15.
To begin with, it is easy to see, by collecting together terms with the same power
of u, that every cubic curve in R
m
can be written in the form
(11.34)
where the a
i
are vectors in R
m
. For example,
can be written as
Suppose that one wants to use a polynomial as in (11.34) to design curves. The a
i
are then the unknowns and in this representation of the function they are what has
to be determined. However, the same function can be specified in many different ways.
The most convenient way to specify the parameterization depends on what one is
doing. Specifying the a
i
directly is usually the least convenient. Hermite interpolation
was basically a case where one wanted to specify the curve by means of its endpoints
and its tangent vectors at those points. This is a more geometric approach but there
are others. Given that curves can be represented in different ways it is desirable to be
able to switch between representations. We show in this and later sections that matri-
ces can be used effectively for this task.
Notation. We shall abbreviate p(c) and p¢(c) to p
c
and p
u
c
, respectively.
From now on, unless stated otherwise, the domain of our cubic curve is assumed
to be [0,1]. This assumption leads to simplified formulas but the results in this case
translate easily into corresponding results for other domains. See the comments at
the end of this section.
Define matrices
(11.35)
Definition. The vectors a
i
are called the algebraic coefficients of the cubic curve p(u).
The elements of B
h
are called its geometric or Hermite coefficients.
UA
a
a
a
a
B
p
p
p
p
=
()
=
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
=
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
u u u and
h
u
u
32
3
2
1
0
0
1
0
1
1, , .
pu u u u
()
=
()
+-
()
+
()
+
()
372 0 31 201 015
23
,, , , ,, ,, .
pu u u u u u u
()
=+-+ +++
()
23 375 2
23 32
,
pu u u u
()
=+ + +aa a a
01 2
2
3
3
,
11.3 Cubic Curves 391

Note that
Furthermore, in analogy with equation (11.9),
Recall from (11.10) that the Hermite matrix M
h
, which is the inverse of the 4 ¥ 4
matrix on the left, is given by
(11.36)
By definition, A = M
h
B
h
. We have the following matrix equations:
(11.37)
where
The functions F
i
(u) are just the Hermite basis functions defined earlier in (11.14). They
will now also be called blending functions because they blend the geometric coeffi-
cients into p. Equations (11.37) show that a curve can be manipulated by changing
either its algebraic or geometric coefficients.
Derivatives of p can also be computed in matrix form:
(11.38)
where
(11.39)
M
u
=
-
---
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
0000
6633
6642
0010
,
¢
()
=
()
¢
==¢pu
bh
u
hh
UM B UM B F B ,
FUM==
() () () ()()
h
FuFuFuFu
1234
.
pu
hh
h
()
=
=
=
UA
UM B
FB ,
M
h
=
-
---
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
2211
3321
0010
1000
.
0001
1111
0010
3210
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
=AB
h
.
p u and p u u u
()
=¢
()
=¢=
()
UA U A A3210
2
.
392 11 Curves in Computer Graphics
and
(11.40)
where
(11.41)
Before moving on to other matrix descriptions of a cubic curve we pause to show
how just the geometric matrix by itself already tells us a lot about its shape. A more
thorough discussion of the shape of curves can be found in Section 11.10. First of all,
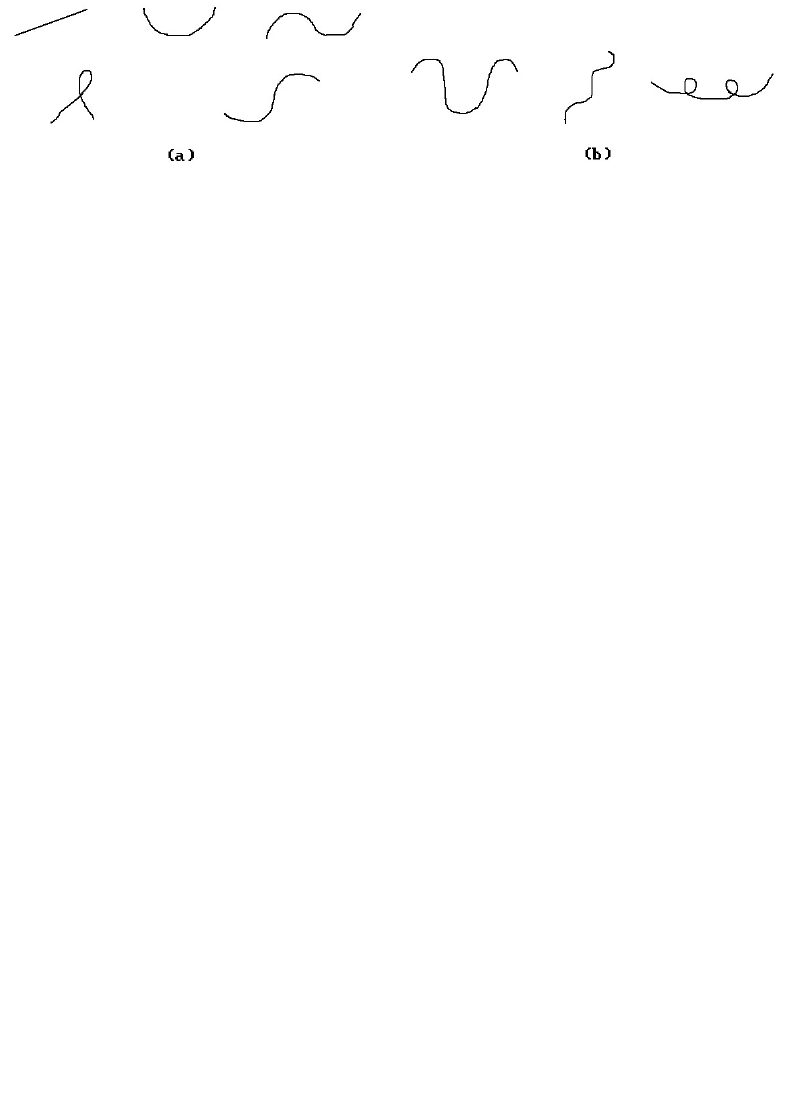
we need to realize that only a limited number of shapes are possible here because
cubic polynomials have the property that their slope can change sign at most twice
and they can have only one inflection point. For example, Figure 11.6(a) shows pos-
sible shapes and Figure 11.6(b) shows impossible ones. Secondly, although there may
be many ways to specify a cubic curve, it is uniquely defined once one knows its geo-
metric coefficients. To put it another way, if one can come up with a cubic curve that
has the same geometric coefficients as some other cubic curve, then this will be the
same curve as the other one, no matter how the other one was defined. Having said
that we shall now show how looking at the x-, y-, and z-coordinates of a cubic curve
separately and then combining the analysis can tell us a lot about its shape and
whether it has loops or cusps.
11.3.1 Example. Consider the following four geometric coefficient matrices B
h
:
ab c d
()
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
()
-
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
()
-
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
()
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
131
731
600
600
13 1
73 1
60 10
60 10
13 1
73 1
20 0 40
20 0 40
13 1
73 1
6010
6010
M
uu
=
-
---
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
0000
0000
12 12 6 6
6 642
.
¢¢
()
=
()
¢¢
==¢¢pu
bh
uu
hh
UM B UM B F B ,
11.3 Cubic Curves 393
Figure 11.6. Possible and impossible cubic curves.
The problem is to sketch the corresponding curves p(u) without actually computing
the polynomials via formula (11.37).
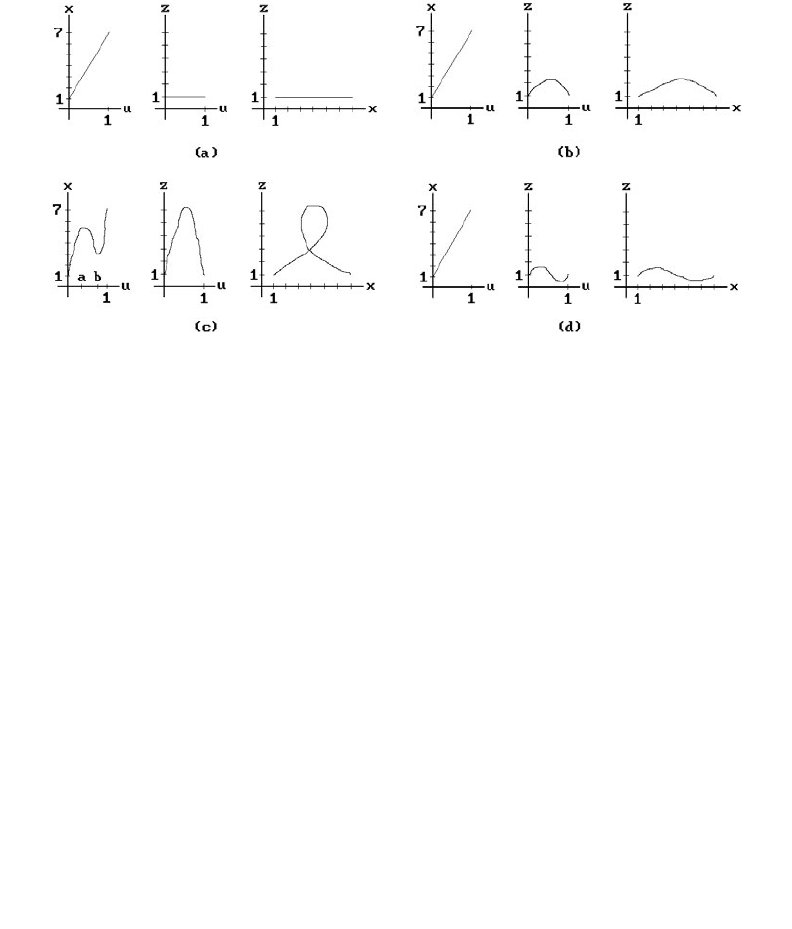
Solution. Sketches of the curves are shown in Figure 11.7, but we want to give a
qualitative explanation for why they look like they do.
First of all, note that in all four cases the curve starts at (1,3,1) and ends at (7,3,1).
Let
Then y(0) = y(1) = 3 and y¢(0) = y¢(1) = 0. It follows that y(u) = 3 for all u and that each
curve lies in the plane y = 3. To analyze each curve we need only find its projection
in the x-z plane. This will be done by analyzing x(u) and z(u).
Curve (a). The tangent vector at the beginning and at the end is (6,0,0). Since the
straight line
from (1,3,1) to (7,3,1) has the same tangent vector, this is the (only) solution. See
Figure 11.7(a).
Curve (b). See Figure 11.7(b). The function x(u) is just a linear function since it has
the right slope, namely, 6, at both ends. Because the slope of z(u) is 10 at 0 and -10
pu u
()
=
()
+
()
131 600,, ,,
pu xu yu zu
()
=
() () ()()
,, .
394 11 Curves in Computer Graphics
Figure 11.7. The cubic curves for Example 11.3.1(a)–(d).

at 1, the shape of the graph of z(u) can be realized by a parabola as shown in the
figure. The function z(u) achieves its maximum value at u = 0.5. (By uniqueness, since
a parabola is able to satisfy the given data, it must be the curve. Actually solving for
z(u) would give us
but we do not need this precise formula.) It follows that as u moves from 0 to 1, x(u)
increases steadily from 1 to 6 in a uniform way and the function z(u) starts at 1 and
increases until u = 0.5, then it decreases back to 1. This leads to the indicated sketch
of the projection of p(u) to the x-z plane.
Curve (c). See Figure 11.7(c). The graph of x(u) needs to have the shape shown since
its slope is 20 at both 0 and 1. It is a cubic. The only fact that we need to believe that
requires perhaps a little extra experience with functions is that the local maximum
and minimum occur at some values a and b, respectively, where 0 < a < 0.5 < b < 1.
The function z(u) has slope 40 at 0 and -40 at 1. Therefore, since this can again be
realized by a parabola which takes on its maximum value at u = 0.5, it is that parabola.
Its actual formula happens to be
but this is again not important for what we are doing. All that we need to
know is that as u moves from 0 to a, the x-coordinate of p(u) is increasing and
so is the z-coordinate. As we move from a to 0.5, x is decreasing, but z is still
increasing. Moving from 0.5 to b, both x and z are decreasing. Finally, as u moves
from b to 1, x is increasing, but z is decreasing. The reader should check that the
x- and z-coordinates of the self-intersecting loop shown on the right in Figure
11.7(c) behave in the same way as one moves from the left to the right endpoint of
that curve.
Curve (d). See Figure 11.7(d). The graph of x(u) is again a straight line and the
shape of the graph of z(u) is forced by its slope of 10 at both ends to be the cubic
as shown. The rest of the argument is, like for curve (c), based on an analysis of
the regions where x and z are increasing and decreasing. This finishes Example
11.3.1.
Example 11.3.1 and others such as Exercise 11.3.2 should begin to give the reader
a feel for how changing p
u
0
and p
u
1
affects a curve.
One other useful matrix form is the one for a cubic curve that interpolates four
points p
0
, p
1
, p
2
, and p
3
. Although equation (11.8) already described a general solu-
tion for this problem, it is worthwhile to state the special uniform case explicitly. That
is the case where the u
i
are chosen to be the numbers 0, 1/3, 2/3, and 1, in other words,
p
i
= p(i/3). Let
zu u
()
=- -
()
+20 0 5 6
2
.,
zu u
()
=- -
()
+505225
2
..,
11.3 Cubic Curves 395
Then the so-called four-point matrix form of a cubic curve is
(11.42)
where the four-point matrix M
4
is defined by
(11.43)
The geometric matrix B
h
and P are related by the equation B
h
= LP, where
(11.44)
The discussion up to here has centered on cubic curves with domain [0,1]. What
happens in the case of a different domain [a,b]? One can give a similar analysis, except
that the “geometric coefficients” for such a cubic curve would have to be based on the
values and tangents at a and b, rather than at 0 and 1. Other than that one could
proceed pretty much as before. Note that the Hermite matrix M
h
can no longer be
used, but there would be a matrix that plays the same role but based on a and b.
Exercise 11.3.4 asks the reader to work out one example of such a change.
11.4 Bézier Curves
This section and the next will deal with curves that are defined by control points but
do not interpolate them in general. We shall return to the interpolation problem in
Section 11.5.5.
Although the geometric coefficients approach to defining curves is a big improve-
ment over having to specify the algebraic coefficients, specifying tangent vectors in
an interactive computer graphics environment is still somewhat technical. A better
way allows a user to specify these vectors implicitly by simply picking points that
suggest the desired shape of the curve at the same time. Figure 11.8 shows a cubic
curve p(u) which starts at p
0
and ends at p
3
. It is very easy to specify the tangent lines
LMM==
--
--
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
-
h
1
4
11
2
9
2
9
2
11
2
1000
0001
91
19
.
M
4
9
2
27
2
27
2
9
2
45
2
9
2
11
2
9
2
918
91
1000
=
--
--
--
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
.
pu
()
= UM P
4
,
P
p
p
p
p
=
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
0
1
2
3
.
396 11 Curves in Computer Graphics