Agoston M.K. Computer Graphics and Geometric Modelling: Implementation and Algorithms
Подождите немного. Документ загружается.

12.2 Surfaces of Revolution 477
Since p(1,p/4) = p, it follows that
are a basis for our tangent plane. Finally,
is a normal vector to the plane, so that its equation is
or
12.2.2 Example. Assume that S is the surface of revolution obtained by rotating
the segment X = [(3,1),(3,3)] about the x-axis. We want to find the tangent plane to S
at p = (3,0,2).
Solution. The surface S is parameterized by
and
∂
∂
qqq
∂
∂q
qqq
p
y
y and
p
yyy, ,cos ,sin , , sin , cos .
()
=
()()
=-
()
00
py y y, , cos , sinqqq
()
=
()
3
22220xyz--+=.
222 122 0,, ,, ,, ,--
()
∑
()
-
()()
=xyz
∂
∂
p
∂
∂q
p
pp
x
14 14 2 2 2,,,,
()
¥
()
=- -
()
∂
()
=
()
∂
()
=-
()
p
x
and
p
∂
p
∂q
p14 11212 14 0 22,,, , ,,
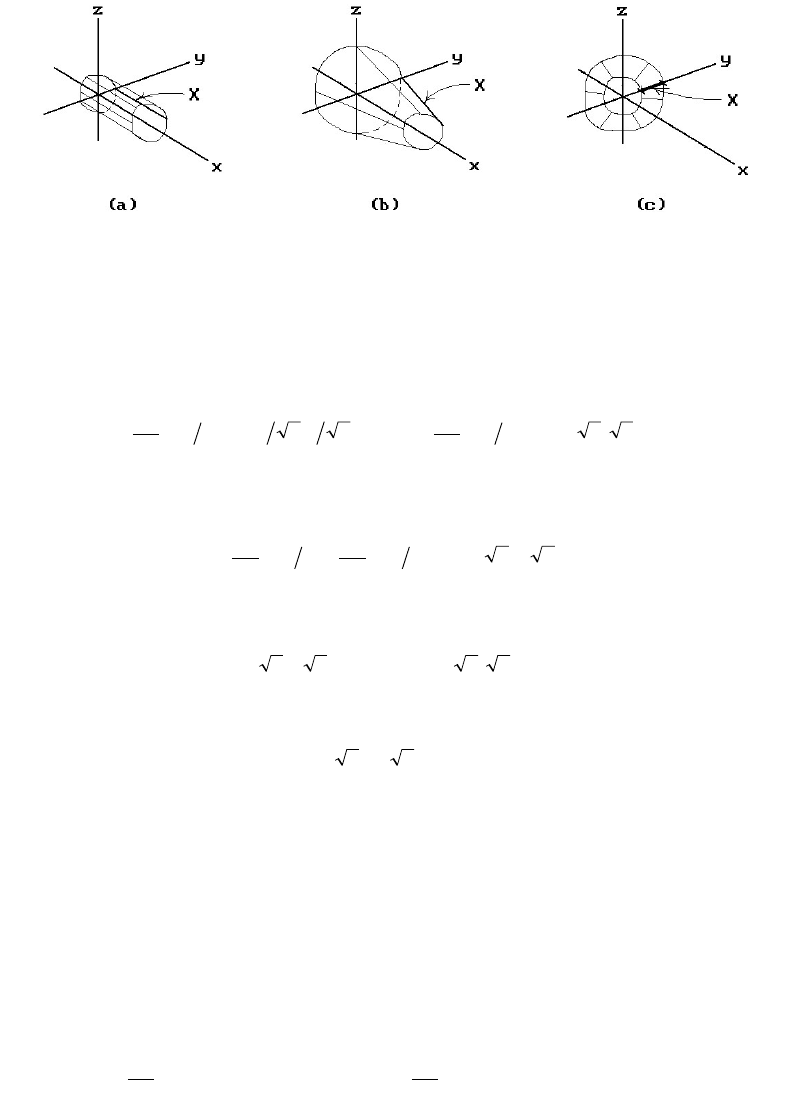
Figure 12.4. Interesting surfaces of revolution.

Since p(2,p/2) = p, it follows that
are a basis for our tangent plane. Finally,
is a normal vector to the plane, so that its equation is
or
Next, if we rotate a semicircle about an axis whose endpoints lie on the axis, then
we get a sphere. In the case of the semicircle of radius r about the origin, we can
parameterize its points with the map
This leads to the following parameterization of the sphere of radius r about the origin:
(12.5)
See Figure 12.5(a). The partial derivatives
(12.6)
define the tangent planes except at the two poles (±r,0,0) where they vanish. The
tangent planes at those two points have to be handled as a special case unfortunately.
If we rotate a circle about an axis and if this circle does not meet the axis, then we
get a torus. As a special case, let T be the torus obtained by rotating the circle of radius
r with center (0,R,0), r < R, about the x-axis. See Figure 12.5(b). Here is another natural
way to visualize the standard parameterization of T. Let P
q
be the plane through the x-
axis that makes an angle q with the x-y plane. This plane intersects T in a circle C
q
with
center Ru
q
, where u
q
= (0,cosq, sinq) is the unit vector in the y-z plane that makes an
angle q with the y-axis. Parameterizing the points of C
q
by the angle f that the ray from
the center of C
q
makes with the x-axis corresponds to the map
∂
∂q
fq f q f q
p
rr, , sin sin , sin cos
()
=-
()
0
∂
∂f
fq f f q f q
p
rr r, sin , cos cos , cos sin
()
=-
()
prr rfq f f q f q, cos , sin cos , sin sin .
()
=
()
ffffpÆ
()
Œ
[]
r r forcos , sin , .0
x -=30.
200 302 0,, ,, ,, ,
()
∑
()
-
()()
=xyz
∂
∂
p
∂
∂q
p
p
y
p
22 22 200,,,,
()
¥
()
=
()
∂
∂
p
∂
∂q
p
p
y
and
p
22 001 22 020,,, ,,,
()
=
() ( )
=-
()
478 12 Surfaces in Computer Graphics
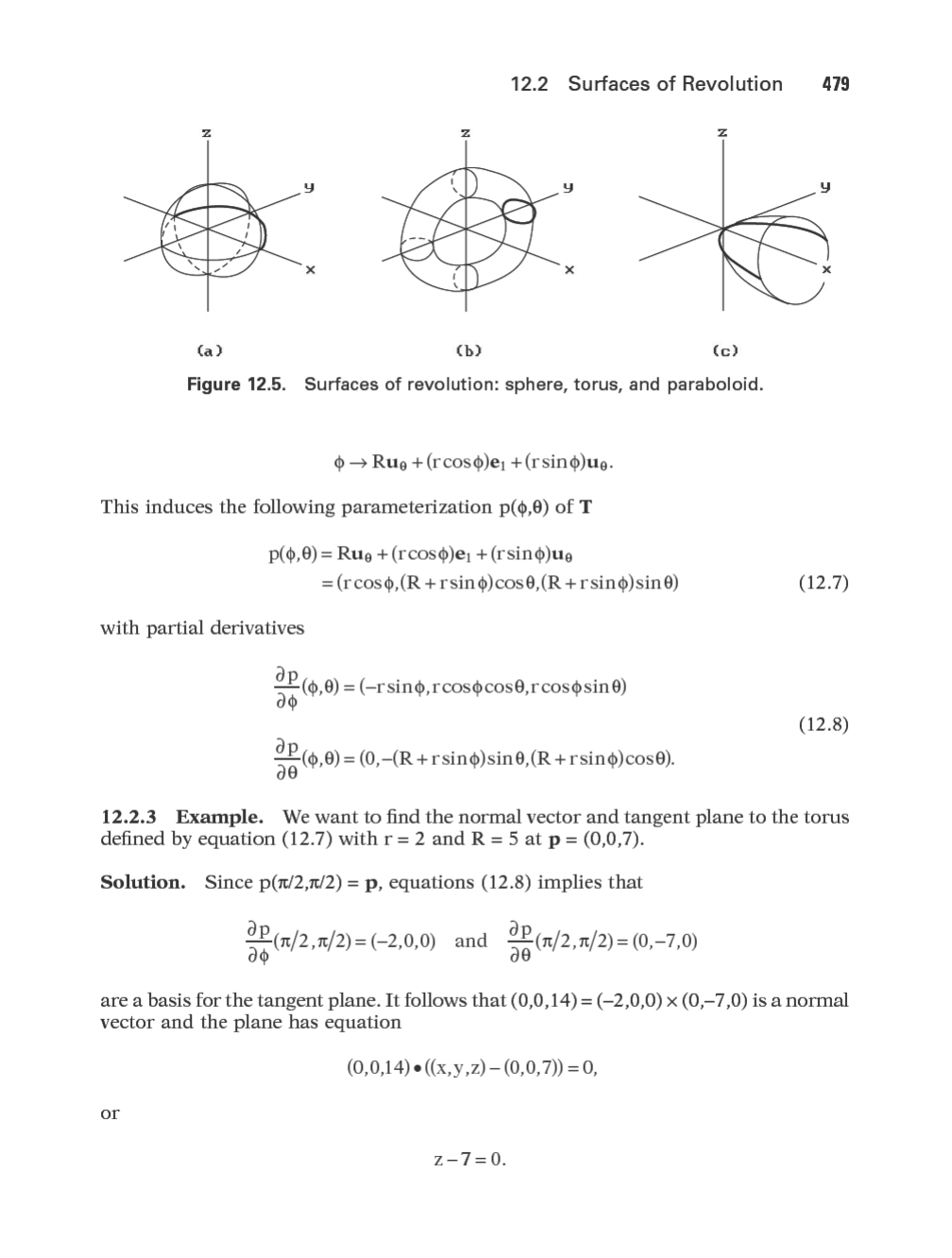
If we rotate half of a parabola about its axis, then we get a paraboloid of revolution
(also called an elliptic paraboloid). See Figure 12.5(c). If we do the same thing to a
hyperbola, we get a hyperboloid of revolution (also called a hyperboloid of one sheet).
12.2.4 Example. Let S be the paraboloid of revolution obtained by rotating the
part of the parabola x = y
2
, y ≥ 0, about the x-axis. We want to find the tangent plane
and normal to S at p = (4,0,2).
Solution. The standard parameterization for S is
Since p(4,p/2) = (4,0,2) and
evaluating these vectors at (4,p/2) and taking the cross product gives us that (1/2,0,
-2) is a normal vector, so that
or
is the equation for the tangent plane.
12.3 Quadric Surfaces and Other Implicit Surfaces
Like the conic curves, quadric surfaces are an important shape for CAGD. A quadric
surface is a subset of points (x,y,z) in R
3
which satisfies a general quadratic equation
of the form
(12.9)
A complete classification of the solutions to equation (12.9) can be found in Section
3.7 in [AgoM04] and we shall not repeat it here. Omitting the degenerate cases, one
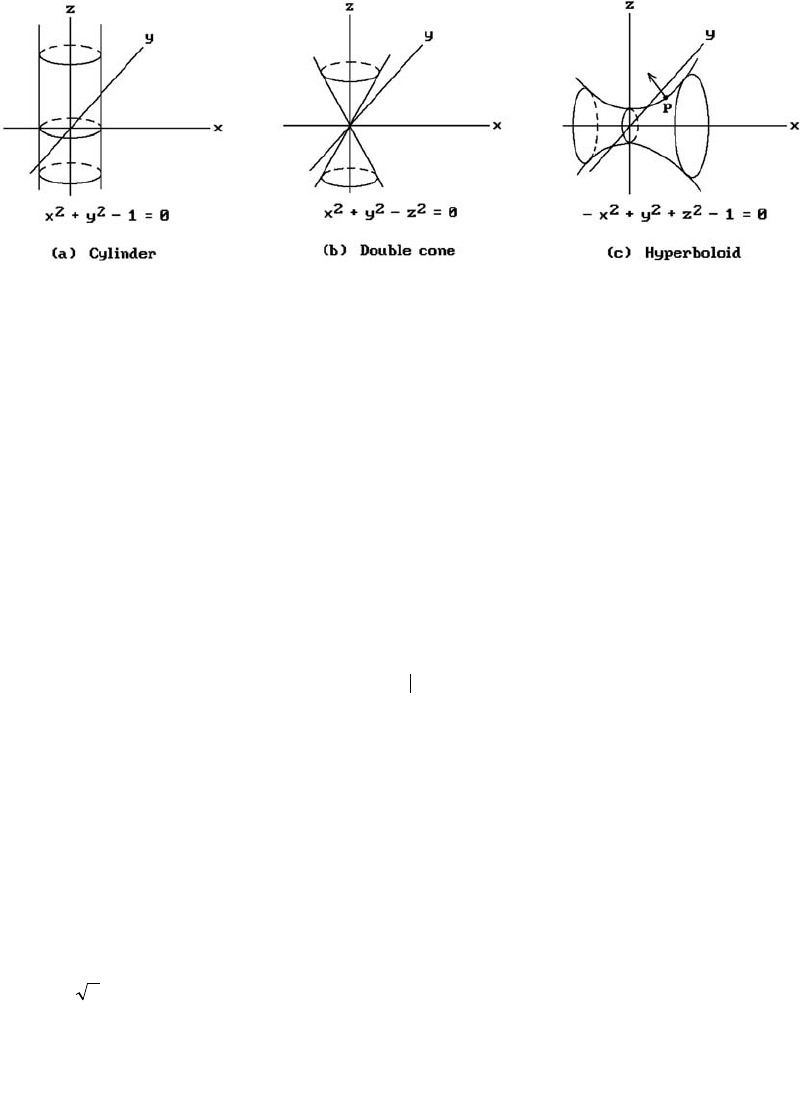
gets the basic ellipsoids, cylinders, cones, paraboloids, and hyperboloids. Figure
12.5(a) and (c) showed a sphere (a special case of an ellipsoid) and paraboloid. Figure
12.6 shows examples of the others. Clearly, many mechanical parts have such shapes.
In an interesting paper, Goldman ([Gold83]) analyzes quadrics that are surfaces of
ax by cz dxy exz fyz gx hy iz j
222
0+++++++++=.
xz-+=440,
120 2 402 0,, ,, ,, ,-
()
∑
()
-
()()
=xyz
∂
∂
qqq
∂
∂q
qqq
p
x
x
xx
p
xxx
, , cos , sin
, , sin , cos ,
()
=
Ê
Ë
ˆ
¯
()
=-
()
1
1
2
1
2
0
px x x x, , cos , sin .qqq
()
=
()
480 12 Surfaces in Computer Graphics
12.3 Ouadric Surfaces and Other Implicit Surfaces 481
revolution (like the cyclinder, ellipsoid, paraboloid, cone, and hyperboloids) and
shows that they make good candidates for primitives in modeling systems because
one can classify their intersections.
A fundamental question for a quadric surface like for all surfaces is how one
can find a normal vector and an equation for the tangent plane at a point. Since
many of these surfaces are surfaces of revolution, we could apply the methods
developed in the last section. We could also use the fact that these surfaces can be
parameterized and tangent planes are easily computed from parameterizations.
Here, rather than using either of these two approaches, we shall describe another
powerful method. Quadric surfaces are a special case of implicit surfaces. An
implicit surface S in R
3
is a surface that is the set of zeros of a function f : R
3
Æ R,
that is,
It is a well-known fact that if p Œ S, then the gradient to f at p, —f(p), is a normal
vector to S at p (assuming that the function f is differentiable). This means that com-
puting normals for implicit surfaces is trivial. Of course, once one has the normal,
then the tangent plane is easily expressed in the point-normal form.
12.3.1 Example. We want to find the tangent plane to the hyperboloid S defined
by
at p = ( ,0,2). See Figure 12.6(c).
Solution. Let
fxyz x y z,, .
()
=- + + -
222
1
3
-+ + =xyz
222
1
SpR p=Œ
()
=
{}
3
0f.
Figure 12.6. Three quadric surfaces.

Since —f(x,y,z) = (-2x,2y,2z), —f(p) = ( ,0,4) is a normal vector to S at p. It follows
that the tangent plane is defined by
or
From the point of view of finding normals to surfaces it is therefore advantageous
to have an implicit representation of it. Unfortunately, except for quadric surfaces,
surfaces are usually presented via parameterizations. Finding an implicit representa-
tion given a parameterization is a nontrivial problem that is addressed in Chapter 10
in [AgoM04].
It should be pointed out that many surfaces of revolution are implicit surfaces, so
that the gradient method for finding normals and tangent planes applies to them. For
example, consider the surface of revolution defined by equation (12.2). It is easy to
show that this surface is the set of zeros of the function
(12.10)
12.3.2 Example. We rework Example 12.2.4 using this approach. Using equation
(12.10), the surface is defined by the equation
But —F(x,y,z) = (-1,2y,2z) and —F(4,0,2) = (-1,0,4). The latter is, up to a scalar
multiple, the same normal as the one we got before.
Finally, we mention Barr’s ([Barr81]) superquadric surfaces. These are the surface
analogs of superellipses and are useful in representing shapes such as rounded blocks
or rounded square toroids. They are defined by trigonometric functions raised to expo-
nents. [Barr92] presents expressions for their volume, center of mass, and rotational
inertia tensor.
12.4 Ruled Surfaces
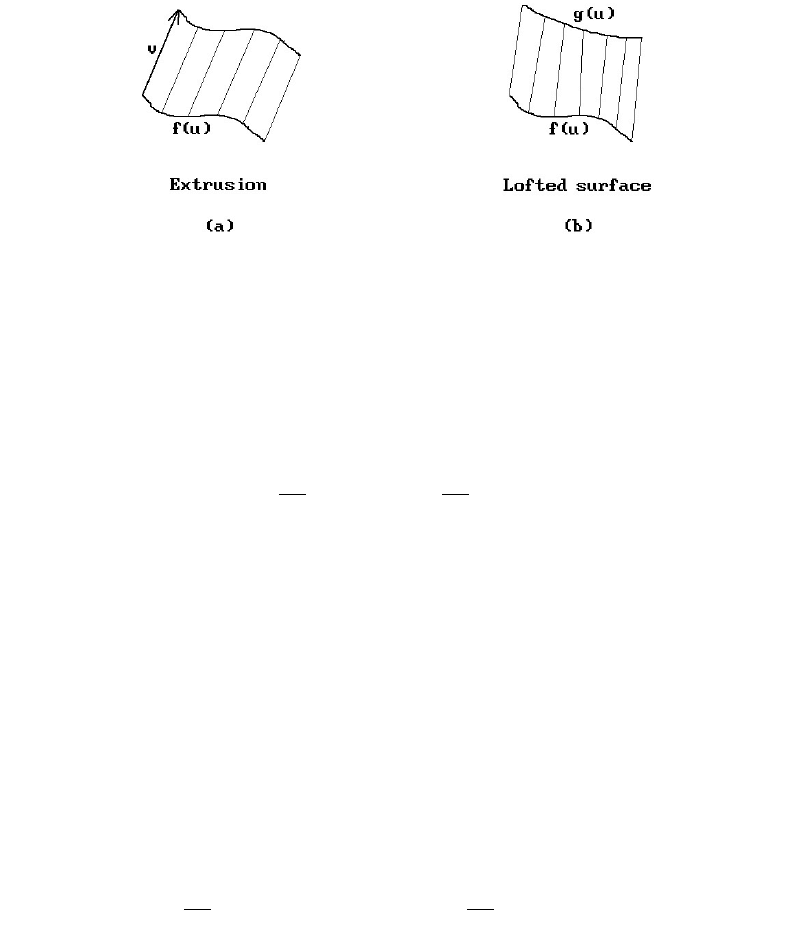
Ruled surfaces are probably the next simplest surfaces after planes. Special cases of
these are extrusions. These are surfaces obtained by sweeping a vector along a curve.
Definition. Given a curve f : [a,b] Æ R
3
and a vector v ΠR
3
, the parametric surface
defined by
pab:, ,
[]
¥
[]
Æ01
3
R
Fxyz y z x,, .
()
=+-=
22
0
Fxyz y z f x,, .
()
=+-
()
222
-+-=3270xz .
-
()
∑
()
-
()()
=2304 302 0,, ,, ,,xyz
-23
482 12 Surfaces in Computer Graphics
12.4 Ruled Surfaces 483
(12.11)
is called an extrusion. The vector v is called the sweep vector for the extrusion.
See Figure 12.7(a). The partials are again easy to compute:
(12.12)
Definition. Given two curves f, g : [a,b] Æ R
3
, the parametric surface
defined by
(12.13)
is called a lofted surface.
Lofted surfaces are ruled surfaces that interpolate two curves. See Figure 12.7(b).
The partials are
(12.14)
Note that extrusions are a special case of a lofted surface. In both the case of extru-
sions and the case of lofted surfaces, one needs to worry about self-intersections. Of
the nondegenerate quadric surfaces, the cylinders and cones are ruled surfaces. The
hyperboloid of one sheet and the hyperbolic paraboloid are doubly ruled surfaces. For
a more thorough discussion of ruled surfaces that includes algorithms for computing
planar intersections and contour outlines see [PePR99].
One question that sometimes arises in the context of ruled surfaces is whether
∂
∂
∂
∂
p
u
v f u vg u and
p
t
gu fu=-
()()
+
()
=
()
-
()
1 ¢¢ .
p u v v f u vg u,.
()
=-
()()
+
()
1
pab:, ,
[]
¥
[]
Æ01
3
R
∂
∂
∂
∂
p
u
f u and
p
t
=
()
=¢ v.
put fu t,
()
=
()
+ v
Figure 12.7. Extrusions and lofted surfaces.
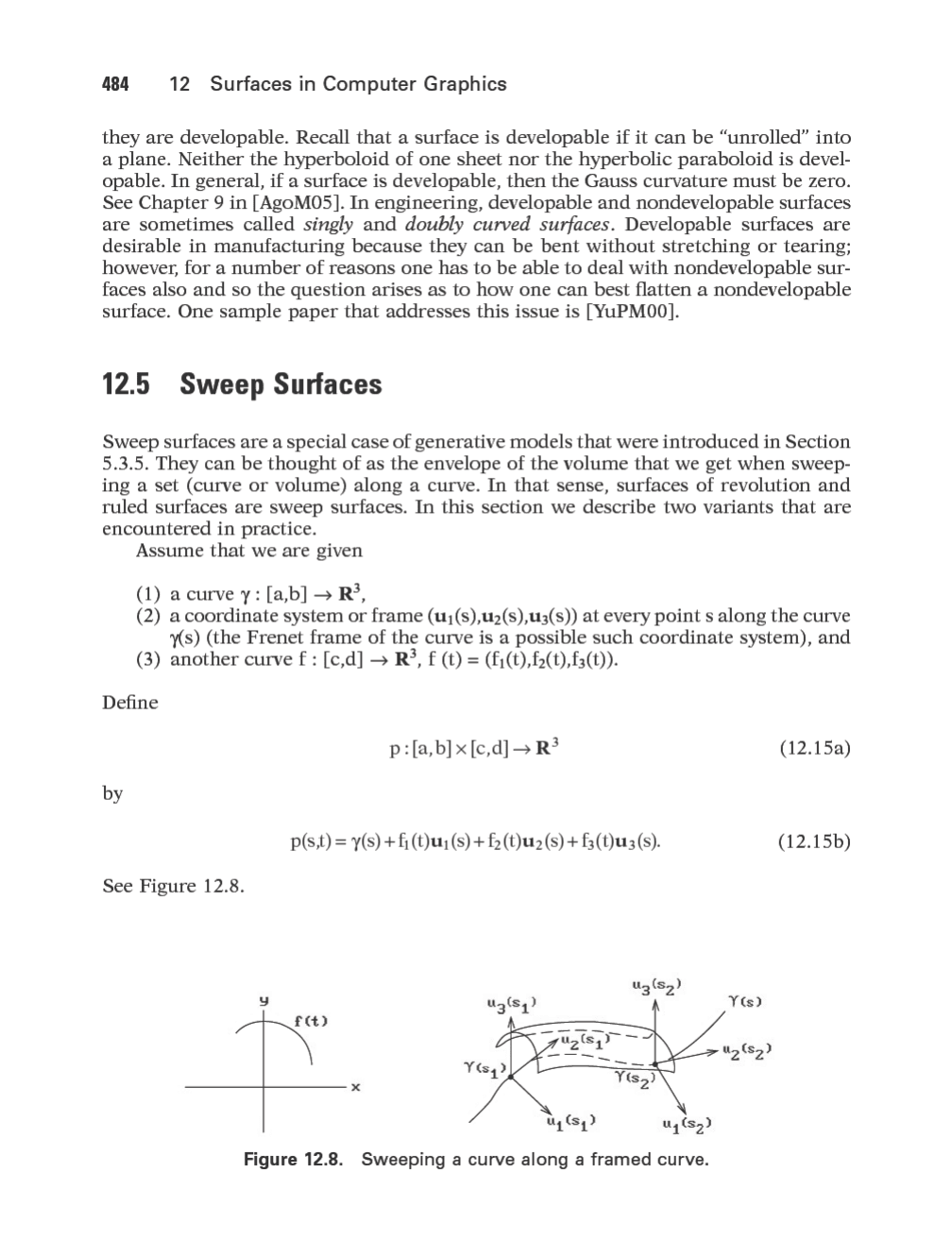
12.5 Sweep Surfaces 485
Definition. The parametric surface p(s,t) defined by equation (12.15b) is called the
sweep surface obtained by sweeping f(t) along the framed curve g(s).
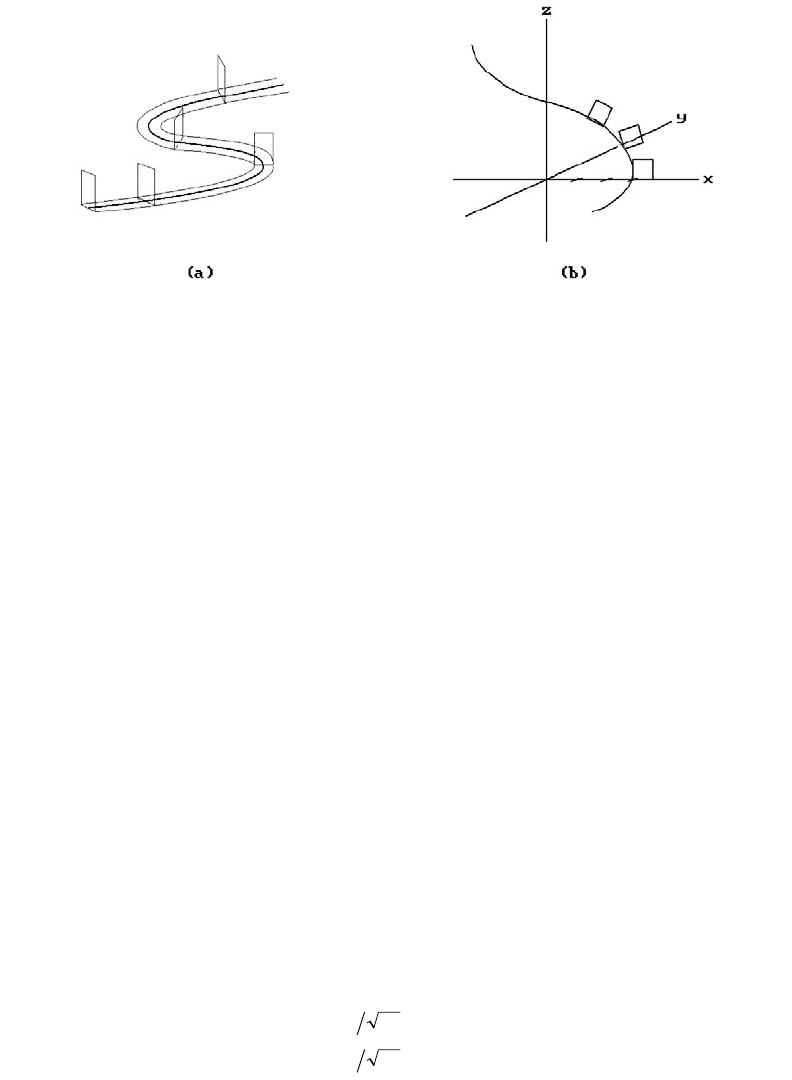
12.5.1 Example. The path of a cutter as shown in Figure 12.9(a) can easily be
described as two sweep surfaces defined by equations like equation (12.15b), where
each function f(t) parameterizes a vertical segment.
Equation (12.15b) can be generalized by letting a one-parameter family of
affine maps T
s
act on the curve f(t) as we sweep it along g(s). Define function
g
i
(s,t) by
and the new parametric surface p(s,t) by
(12.16)
Definition. The parametric surface p(s,t) defined by equation (12.16) is called a
screw sweep surface.
12.5.2 Example. Let g(s) be the spiral
Using the Frenet frame (T(s),N(s),B(s)) for this curve we let
Let f : [0,4] Æ R
3
parameterize the unit square in the x–z plane as follows:
u
u
u
1
2
3
0
110 3 3 1
110 3
sNs s s
sTs s s
sBs s s
()
=
()
=- -
()
()
=
()
=
()
-
()
()
=
()
=
()
-
()
cos , sin , ,
sin , cos , ,
sin , cos , .
g ssss
()
=
()
33cos , sin , .
pst s g st s g st s g st s,,,,.
()
=
()
+
() ()
+
() ()
+
() ()
g
11 22 33
uuu
T f t g st g st g st
s
()()
=
() () ()()
123
,, ,, ,
Figure 12.9. Sweep surfaces: a cutter path and square rotated along a spiral.
486 12 Surfaces in Computer Graphics
We shall rotate the square as it is swept along g(s). This can be accomplished by
defining
The functions g
i
(s,t) are easily computed. For example, for t Π[1,2],
Figure 12.9(b) shows the resulting screw sweep surface.
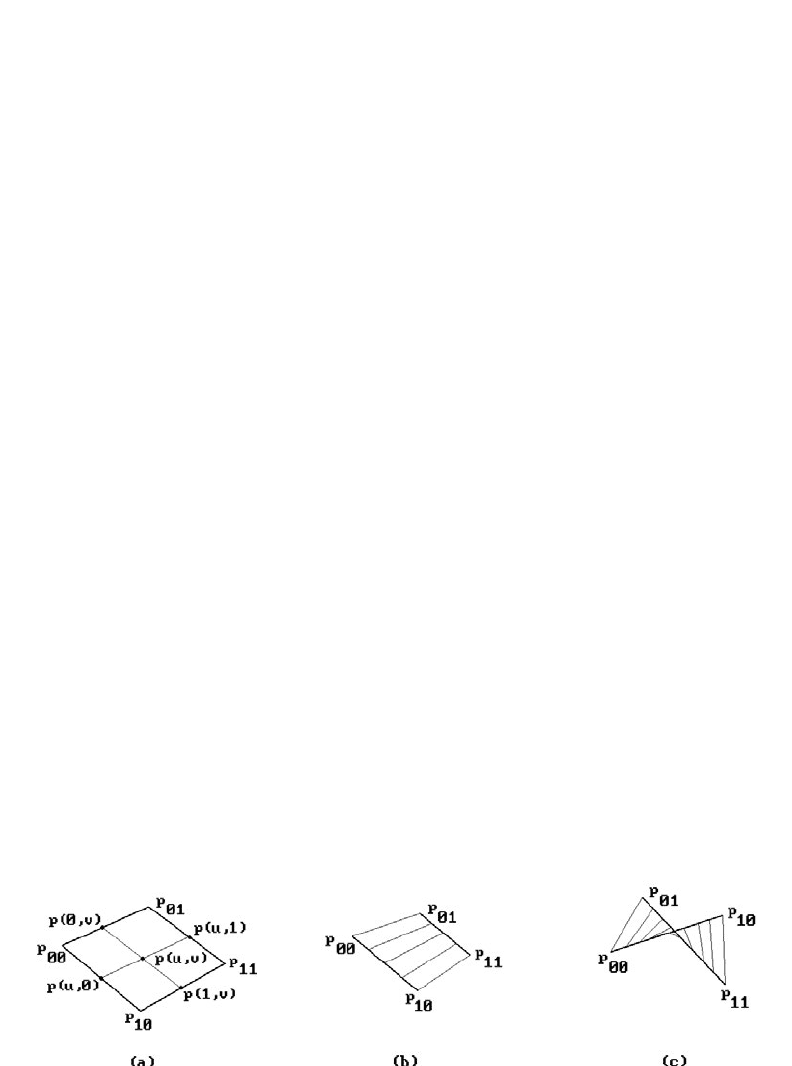
12.6 Bilinear Surfaces
Let four points p
00
, p
01
, p
10
, and p
11
be given. The easiest way to define a surface
p(u,v) that interpolates these points is by means of a double linear interpolation.
Define
(12.17a)
(12.17b)
where 0 £ u, v £ 1. Equation (12.17a) says that to find p(u,v) we first find p(u,0) and
p(u,1) by a linear interpolation in the u-direction and then do a linear interpolation
of those points in the v-direction. Equation (12.17b) says that we get the same answer
if we first interpolate in the v-direction and then in the u-direction. See Figure
12.10(a).
Definition. The parametric surface defined by equations (12.17) is called the
bilinear surface determined by the four points or the four-point interpolating surface.
=-
()
-
()
+
[]
+-
()
+
[]
=-
()
-
()
+-
()
+-
()
+
11 1
11 1 1
00 01 10 11
00 01 10 11
uv v uv v
uv uv uv uv
pp pp
pppp
,
,
puv v u u v u u,,
()
=-
()
-
()
+
[]
+-
()
+
[]
11 1
00 10 01 11
pp pp
g s t s g s t and g s t t s
12 3
01, cos , , , , sin .
()
=
()
=
()
=-
()
T xyz x syz s
s
, , cos , , sin .
()
=
()
ft t t
tt
tt
tt
()
=
()
Œ
[]
=-
()
Œ
[]
=-
()
Œ
[]
=-
()
Œ
[]
,, , ,,
,, , , ,
,,, , ,
,, , , .
00 01
10 1 12
301 23
004 34
Figure 12.10. Bilinear surfaces.