Алексеев В.В., Соловьев А.С. Автоматизированный электропривод станков шарошечного бурения. Учебное пособие
Подождите немного. Документ загружается.

31
32
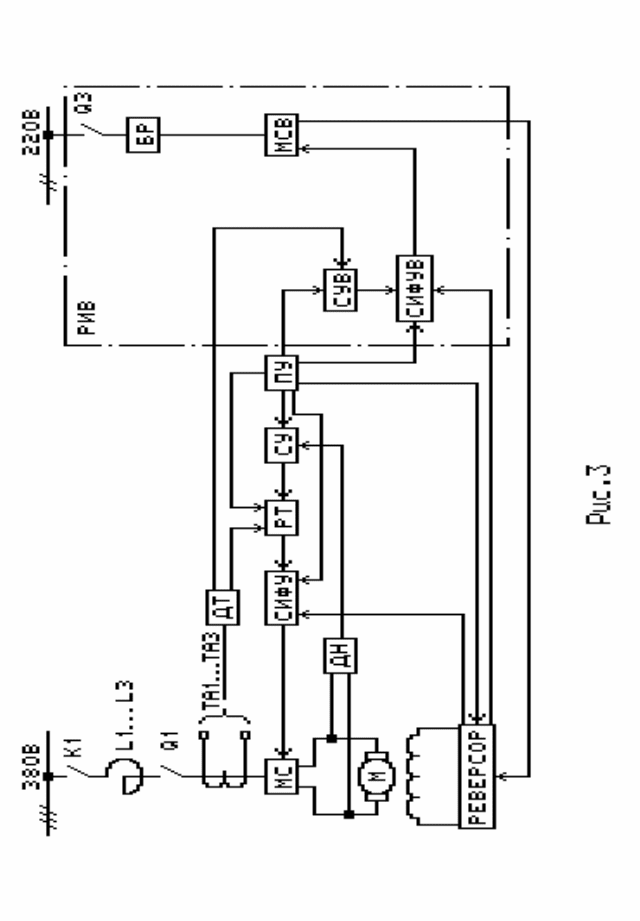
трансформаторы тока ТА1...ТА3 (рис. 3). Контур регулирования
скорости содержит суммирующий усилитель (СУ) и датчик
напряжения (ДН).
РИВ состоит из выпрямительного моста МСВ, системы
импульсно-фазового управления (СИФУВ), суммирующего
усилителя СУВ. РИВ может работать в режиме стабилизации тока
возбуждения, а также в режиме зависимого регулирования
возбуждения от тока якорной цепи, осуществляя
ослабление поля
двигателя и повышение скорости привода при малых нагрузках.
Поскольку реверсирование двигателя требуется только при
операциях развинчивания бурового снаряда, и нет необходимости
в тормозных режимах, то реверсирование привода обеспечивается
изменением полярности тока возбуждения. Для этой цели в цепи
возбуждения имеется блок реверсивных контакторов (реверсор).
В период переключения работа систем
импульсно-фазового
управления СИФУ и СИФУВ блокируется, чтобы исключить
наличие тока в цепях якоря и возбуждения.
Безусловно, наиболее радикальным направлением
совершенствования электроприводов буровых станков является
разработка и внедрение приводов переменного тока.
Анализ показывает [2], что наиболее полно требованиям,
предъявляемым к приводам буровых станков, отвечают
электроприводы переменного тока по системе ПЧ-АД. При
этом
система ПЧ-АД имеет ряд преимуществ (в том числе перед
приводом ТП-Д).
Во-первых, асинхронный двигатель имеет лучшие
массогабаритные показатели, чем двигатель постоянного тока. Так
асинхронный короткозамкнутый двигатель серии 4А при
равной номинальной мощности и частоте вращения имеет
почти вдвое меньшую массу и примерно втрое меньшую
стоимость.
Во-
вторых, наличие коллектора у двигателя
постоянного тока, требует периодического ухода и
накладывает ограничения на допустимое быстродействие и
перегрузочную способность.
Построение системы управления приводом по принципу
33
подчиненного регулирования дает возможность реализовать высокое
быстродействие двигателя.
Существенный недостаток системы ПЧ-АД - сложность
схемы. Он может быть с успехом устранен путем применения
интегральных микросхем, например, унифицированной блочной
системы регулирования (УБСР-АИ-Б) или микропроцессоров.
Блочное исполнение системы обеспечивает наилучший
коэффициент технического использования привода, так как среднее
время устранения неисправностей
в такой схеме значительно
меньше, чем в механической части.
Основным техническим средством получения силового
напряжения регулируемой амплитуды и частоты в настоящее время
являются преобразователи частоты со звеном постоянного тока (ПЧ)
и непосредственной связью (НПЧ).
Преобразователи со звеном постоянного тока выпускаются
промышленностью в более широких масштабах. Это обстоятельство и
то, что
этот преобразователь позволяет регулировать частоту в
широких пределах, обуславливает перспективность применения в
приводах буровых станков преобразователей со звеном постоянного
тока.
В качестве электропривода бурового станка может быть
применен комплектный тиристорный привод ЭКТ2Д-160/380-50,
имеющий следующие технические данные.
Напряжение питания, В 380
Частота, Гц 50
Число фаз 3
Номинальное выходное напряжение, В 380
Номинальный выходной ток, А 160
Номинальная мощность, кВА 105
Диапазон изменения частоты, Гц 5...60
Коэффициент полезного действия 0,95
Коэффициент мощности 0,88
Упрощенная функциональная схема привода по системе
ПЧ-АД на базе тиристорного электропривода ЭКТ2 приведена на
рис.4. Силовая часть преобразователя подключена к трехфазной
сети 380 В и состоит из управляемого выпрямителя УВ, фильтра
Ф и автономного инвертора АИ. Система управления
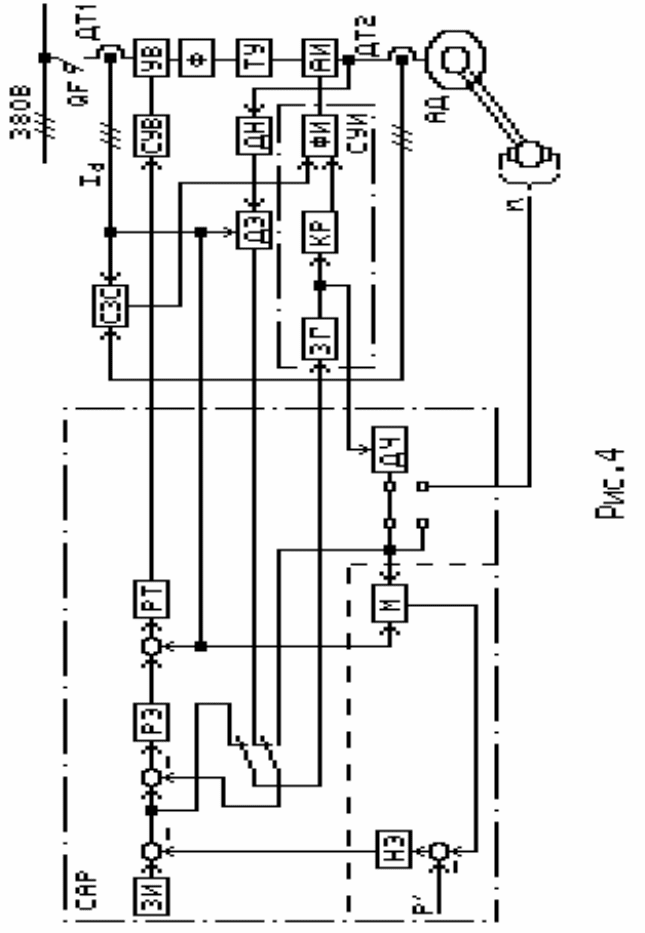
34
35
выпрямителем СУВ обеспечивает регулирование уровня, а система
управления инвертором СУИ - частоты выходного напряжения.
Последняя содержит стандартные блоки: задающий генератор ЗГ,
кольцевой распределитель КР и формирователь импульсов ФИ.
На системы СУВ и СУИ поступают сигналы с выхода
системы автоматического регулирования САР, имеющей
канал управления частотой и напряжением. Наличие на плате САР
переключателей и перемычек позволяет изменять структуру. На
рис.4 представлена САР с регулятором ЭДС РЭ в канале управления
напряжением, выполненном двухконтурным по принципу
подчиненного регулирования. Во внутренний контур регулирования
тока входят регулятор тока РТ и датчик тока ДТ. Регулирование
напряжения U производится по сигналу рассогласования между
заданным значением, поступающим с выхода задатчика
интенсивности ЗИ, и действительной величиной на выходе датчика
э.д.с.(E) ДЭ (или напряжения ДН) двигателя. Сигнал
рассогласования выделяется на выходе регулятора РЭ. Частота f
задается такой, чтобы поддерживался закон частотного
регулирования U/f=const (E/f = const).
В случае установки устройства измерения скорости
двигателя УИС (тахогенератора) напряжение регулируется по
сигналу ошибки скорости двигателя, а частота инвертора задается
такой, чтобы двигатель работал с расчетным значением скольжения.
В динамичных электроприводах при больших темпах
изменения сигнала задания рекомендуется вариант структуры САР,
при котором канал управления напряжением содержит: регулятор
частоты РЧ, или тахогенератор, и регулятор тока РТ. Напряжение
регулируется по сигналу ошибки частоты (скорости), а частота
задается пропорционально э.д.с.
двигателя по сигналу с датчика ДЭ.
САР обеспечивает разгон, торможение и реверс двигателя.
Торможение осуществляется с помощью узла динамического
торможения ТУ, содержащего цепи из резисторов и тиристоров.
Благодаря возможности изменения структуры предусмотрены:
корректировка закона частотного управления, работа на
однодвигательный и многодвигательный привод, поддержание
скорости привода с применением и без применения тахогенератора
,
36
использование П-регуляторов или ПИ-регуляторов. Система защиты
и сигнализации СЗС обеспечивает включение и выключение
электропривода в рабочем и аварийных режимах.
Благодаря использованию для реализации САР
многофункциональных, многовходовых интегральных
операционных усилителей, имеется возможность применения
дополнительного контура, содержащего нелинейный элемент НЭ с
устройством сравнения (и апериодическим фильтром), а также блок
умножения
М, обеспечивающего работу привода в режиме
постоянства мощности.
Наиболее радикальным направлением совершенствования
привода вращателя бурового станка является применение векторных
систем управления частотными приводами с асинхронным
двигателем [4, 5]. В векторной системе составляющие тока статора
(i1, i2) двигателя, ориентированные по вектору потокосцепления,
определяют соответственно величину модуля потокосцепления и
момента, развиваемого двигателем. Система обладает высокими
динамическими
показателями и придает двигателю переменного
тока свойства, аналогичные свойствам привода постоянного тока в
переходных и установившихся режимах, и позволяет в полной мере
использовать преимущества асинхронного двигателя.
Рациональная с точки зрения технической реализации,
система векторного управления СВУ, представленная на рис.5,
имеет в качестве опорного вектор главного потокосцепления, что
обеспечивает и лучшие
энергетические показатели. В качестве
датчиков потокосцепления используются датчики Холла (ДХ).
Система строится по принципу подчиненного регулирования.
Блок регулирования и компенсации БРК содержит канал управления
модулем главного потокосцепления /Ф/ и канал управления скоростью
(n). Канал управления скоростью является двухконтурным и содержит
внутренний контур регулирования составляющей тока i2, определяющей
момент двигателя. Для получения автономности
управления
потокосцеплением и моментом с помощью множительных ячеек М1 и
М2 осуществляется компенсация перекрестных влияний переменных
состояния. С целью обеспечения независимости динамических свойств
системы от уровня модуля главного потокосцепления канал
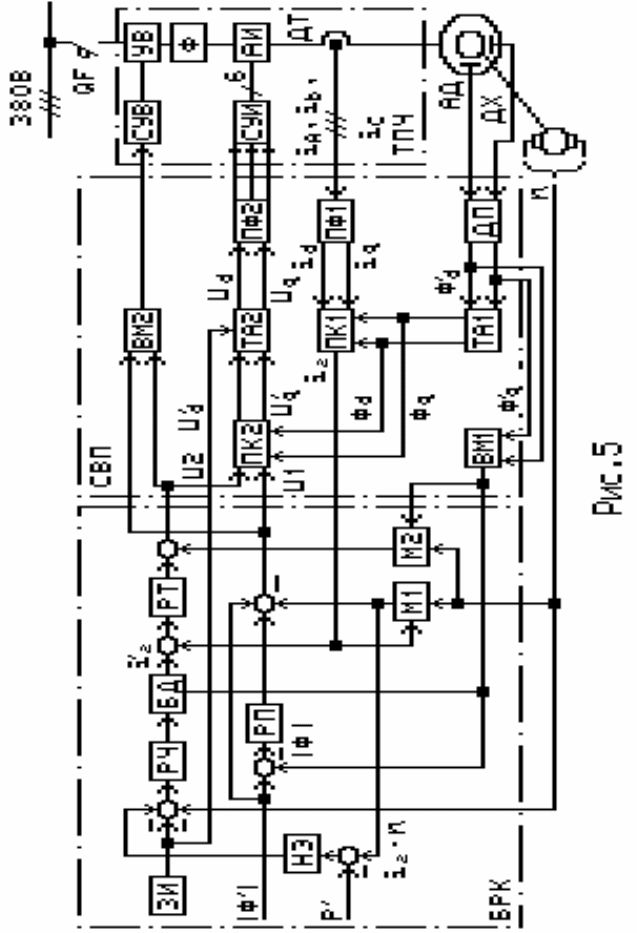
37
38
управления частотой вращения может содержать блок деления БД.
Расчет регуляторов САР производится так же, как и для
системы подчиненного регулирования скорости привода
постоянного тока.
Составляющая компенсирующего воздействия,
представляющая собой произведение проекции тока i2 на скорость n
(i2*n), используется для реализации контура регулирования в
режиме постоянства мощности. Контур содержит устройство
рассогласования и нелинейный
элемент НЭ в виде
однополупериодного выпрямителя. При превышении заданного
уровня мощности P на выходе нелинейного элемента выделяется
сигнал на снижение скорости. Привод переходит в режим работы с
постоянной мощностью. Такой контур обеспечивает выход станка из
режима колебаний, сопровождающегося значительным ростом
расходуемой мощности и устраняемого незначительным изменением
скорости [2].
В связи с организацией управления
с помощью переменных
машины, ориентированных по вектору главного потокосцепления,
система векторного управления содержит, помимо традиционных
блоков, блоки, к которым предъявляются специальные требования.
Так, датчик потока ДП, используя информацию с датчиков Холла
ДХ, должен формировать сигналы, пропорциональные
составляющим вектора главного потокосцепления машины Фd, Фq,
блок управления инвертором СУИ - широкие управляющие
импульсы
из входной трехфазной системы переменных сигналов [4].
Кроме традиционных блоков (регуляторов), система
векторного управления содержит специальные блоки, входящие в
состав системы векторных преобразований (СВП).
Блоки преобразователей координат (ПК1, ПК2),
преобразователей фаз (ПФ1, ПФ2), вычислителей модуля (ВМ1,
ВМ2) являются типовыми функциональными элементами. Блоки
ПК1, ПК2 реализуют матрицу поворота векторов. ПК2 преобразует
составляющие сигналов
в осях 1,2, жестко связанных с главным
потокосцеплением машины, в систему неподвижных осей (d,q),а
преобразователь ПК1 осуществляет обратное преобразование. Блоки
преобразователей фаз (ПФ1, ПФ2) предназначены для
39
преобразования трехфазных напряжений в эквивалентные им
двухфазные и обратно. Блоки ВМ1,ВМ2 выделяют модуль
двухфазной системы входных напряжений. Блоки
тригонометрических анализаторов ТА1 (ТА2),являющиеся наиболее
сложными, выделяют из двухфазной системы напряжений Ф'q, Ф'd
(U'q, U'd) нормированные по амплитуде основные гармоники этих
напряжений Фq, Фd (Uq,Ud), представляющие собой единичные
синусоидальные сигналы sin y, cos y (высшие гармоники
фильтруются).
Все блоки аналоговой СВУ реализуются на операционных
решающих усилителях (ОУ) и множительных ячейках. Эти
элементы могут быть созданы на базе интегральных микросхем
широкого применения: интегральных усилителях К153, К140 и
перемножителях К525 (К159) или УБСР-АИ. Для реализации блока
ТА используются два специализированных умножителя [1].
В случае реализации системы векторного управления на
интегральных аналоговых элементах с учетом условий эксплуатации
на буровых станках наработка на отказ системы составляет около
1000 часов. Такую же наработку на отказ имеет и тиристорный
преобразователь частоты.
При применении микросхем большей степени интеграции
наработка на отказ может быть увеличена. Использование
микропроцессорной техники позволяет повысить качество
управления за счет реализации сложных
законов управления
(инвариантность, самонастройка, оптимизация, адаптация).
Микропроцессор используется для реализации регуляторов
положения, тока, скорости, для прямого цифрового управления
преобразователем частоты, для контроля и диагностики состояния
электропривода. Однако внедрение систем автоматического
микропроцессорного управления процессом бурения сдерживается
отсутствием на поверхности достоверной информации о забойных
параметрах.
Косвенная оценка по наземным параметрам зачастую имеет
слишком большую погрешность. К тому же быстродействие
современных микропроцессоров имеет уровень, ограничивающий
число обратных связей и вычислений.
40
Поэтому наиболее целесообразной системой переменного
тока с векторным управлением является комбинированная аналого-
цифровая система [4].
5.РЕЖИМЫ РАБО ТЫ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
БУРОВЫХ СТАНКОВ ШАРОШЕЧНОГО БУРЕНИЯ
Производительность бурового станка определяется как
технологическими параметрами работы станка, так и горно-
геологическими условиями.
Технологическими параметрами, задаваемыми системой
управления привода вращателя станка, являются: скорость вращения
шарошечного долота n; осевое давление на забой P; расход сжатого
воздуха Q (на станках не регулируется). Неуправляемый параметр
процесса бурения - физико-механические свойства пород.
Параметры и конструкция шарошечного долота
- задаваемые
параметры. Функция цели системы - скорость бурения V.
Под оптимизацией режима бурения следует понимать
сочетание управляемых параметров n и P при заданных постоянных
процесса бурения и возмущении со стороны забоя, при котором
функция цели системы достигает максимума при ограничении
величины себестоимости для проходки, которая также является
функцией технологических параметров c(n,P) [2].
Оптимизация режима связана со
значительными
ограничениями. Это объясняется наличием предельных величин
технологических параметров, изменением свойств разбуриваемых
пород и развивающимися в системе привода вибрациями.
Для осуществления оптимального управления, так же как и
для выбора электрического и механического оборудования,
необходимы исследования режимов работы электромеханических
систем станка.
В процессе бурения буровой инструмент (шарошка)
разрушает забой, горные породы которого
чаще всего неоднородны
по крепости, имеют трещиноватость. В связи с этим нагрузка на
шарошечном долоте носит нестационарный характер и может
быть представлена в виде суммы широкого спектра