Анучин А.С. Использование микроконтроллера для управления АД TMS320x24xx в задачах реального времени
Подождите немного. Документ загружается.

31
U (001)
0
U (011)
60
U (001)
0
U (011)
60
CMP1
CMP2
CMP3
A
B
C
000 001 011 111 011 001 000
U (001)
0
U (011)
60
U (001)
0
U (011)
60
A
B
C
CMP1
CMP2
а б
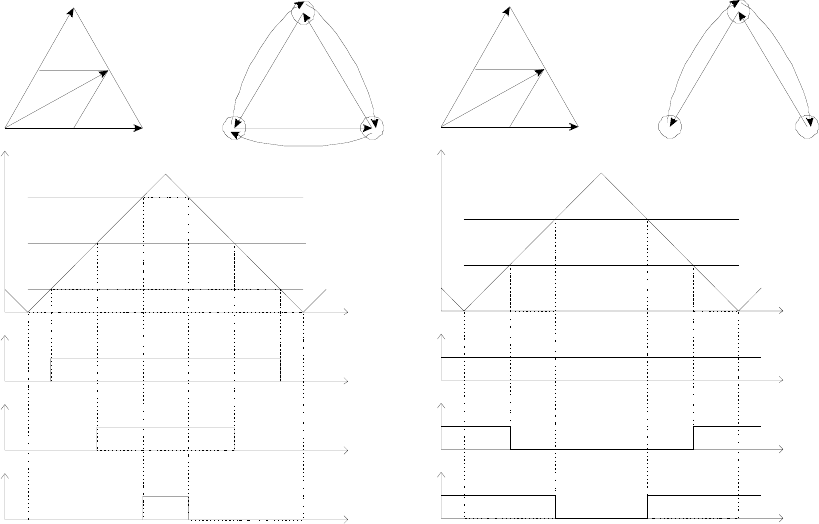
Рис.3. Векторная ШИМ
Алгоритм работы управляющего автомата следующий:
9 установить в начале периода ШИМ состояние инвертора U
m
;
9 при первом сравнении, в зависимости от заданного направления вра-
щения перевести инвертор в состояние U
m+1
или U
m–1
;
9 при втором событии сравнения перевести инвертор в одно из нулевых
состояний O(000) или O(111), код которого отличается от кода преды-
дущего состояния инвертора лишь одним разрядом;
9 при третьем сравнении восстановить предыдущее состояние U
m+1
или U
m–1
;
9 при четвертом сравнении восстановить начальное состояние U
m
.
Для исключения дополнительных переключений на стыках секторов
порядок переключения базовых векторов необходимо менять при каждой
смене сектора. Недостатком метода можно считать несимметричное влияние
«мертвого» времени на форму токов в двигателе, особенно хорошо заметное
при малых значениях вектора напряжения.
3. Задание для выполнения в лаборатории
Напишите программу, в которой будет организовано прерывание, вы-
зывающее готовый блок пространственно-векторной ШИМ. Модуль про-
странственно-векторной ШИМ работает с такими же входными параметрами
как и модуль синусоидальной ШИМ:
переменные в памяти
magnitude – определяет величину выходного вектора напряжения
(формат 1.15);
fi_l, fi_h – определяет значение электрического угла вектора на-
пряжения (формат 1.31);
32
delta_fi_l, delta_fi_h – определяет приращение угла вектора напряжения на
периоде ШИМ (формат 1.31);
константы, определенные в программе пользователя
pwm_period – значение регистра периода таймера.
В программе следует задаться частотой ШИМ (например, 10 кГц), ус-
тановить величину требуемого вектора напряжения и приращения угла на
периоде ШИМ и правильно сконфигурировать ШИМ-генератор в режим
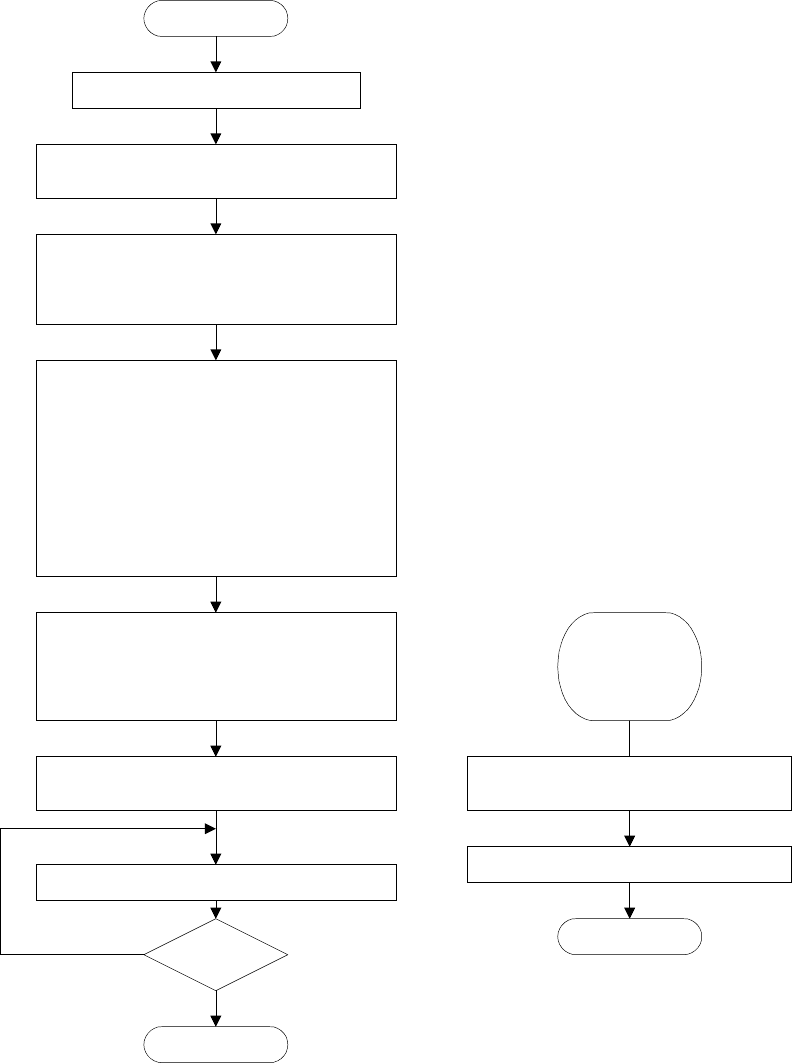
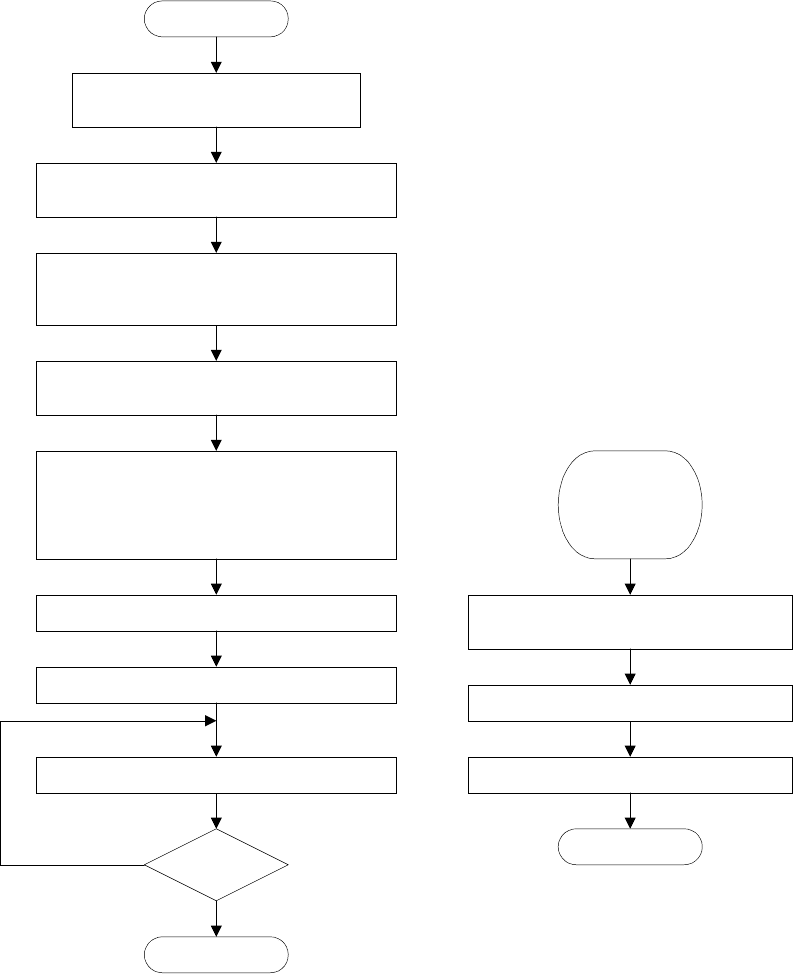
симметричной ШИМ. Для написания можно воспользоваться алгоритмом:
Инициализация переменной _stop
Начало
Инициализация амплитуды вектора
наприяжения и приращения угла
на периоде ШИМ
(magnitude, delta_fi_l, delta_fi_h)
Инициализация периода 1-ого таймера
(T1PR), счетчика (T1CNT), регистра
управления генератором "мертвого" времени
(DBTCON), регистра управления работой
модуля полного сравнения (ACTR),
регистров полного сравнения (CMPR1,
CMPR2), регистра управления
таймером (T1CON) и регистра управления
режимами сравнения (COMCON), запуск
таймера в регистре управления таймером
(T1CON)
_stop == 0
Конец
false
true
Разрешение прерываний по заему 1-ого
таймера (EVIMRA);
загрузка в таблицу векторов (TUFINT1)
адреса процедуры обработки прерывания
по заему 1-ого таймера
Резрешение прерывний второго уровня (IMR);
разрешение маскируемых прерываний (INTM)
Вызов программы "Монитор"
Процедура
обработки
прерывания по
заему первого
таймера
Вызов процедуры векторной ШИМ
(vect_pwm_m_f)
Восстановление контекста
Возврат из ПОП
Инициализация переменных модуля
синусоидальной ШИМ (vect_pwm_m_f_init)

33
Лабораторно-практическая работа №6
Модуль захвата внешних сигналов менеджера событий.
Техника ввода высокоскоростных импульсных сигналов
датчиков
1. Использование отладочной среды MCWIN
Запустите программу Procev.exe. На панели управления выберите при-
ложение для изучения
модуля захвата внешних сигналов. Ознакомьтесь с
методикой программирования модуля захвата, используя
МСК240 Руково-
дство пользователя
.
2. Программирование модуля захвата внешних событий с
использованием платы сопряжения
Устройства захвата тактируются таймерами GP2 и GP3. При подаче
сигнала на вход
CAPx значение таймера захватывается и помещается в двух-
уровневый стек типа FIFO.
2.1. Особенности модулей захвата
Некоторые из особенностей модулей захвата:
9 общий 16-битовый регистр управления CAPCON;
9 один 16-битовый регистр состояния FIFO CAPFIFO;
9 возможен выбор в качестве базового тактирующего таймера GP2 или GP3;
9 для каждого устройства захвата предусмотрен 16-битовый 2-х уровне-
вый стек FIFO;
9 на каждом из входов CAP1 – CAP4 предусмотрен триггер Шмидта;
9 имеются четыре маскируемых флага, на каждый вход модуля захвата;
9 тип фиксируемого фронта определяется пользователем (см. таблицу 1).
Таблица 1. Типы захватываемых фронтов
прямой фронт обратный фронт оба фронта
2.2. Управление модулями захвата
Любой из таймеров общего назначения GP2 или GP3 может быть вы-
бран модулями
захвата 1 или 2, 3 или 4. Если 1 и 2 устройства захвата такти-
руются таймером
GP2, то 3 и 4 устройства захвата могут тактироваться тай-
мером
GP3, и наоборот, если 1 и 2 устройства захвата тактируются таймером
GP3, то 3 и 4 тактируются таймером GP2. Операция захвата не оказывает
никакого влияния на операции сравнения или формирования ШИМ, выпол-
няемые таймером общего назначения.
3. Задание для выполнения в лаборатории
Напишите программу, в которой выполняются следующие действия:
запускается таймер, при нажатии на кнопку значение таймера регистрируется
модулем захвата и осциллографируется.
Сконфигурируйте первый таймер таким образом, чтобы он был генера-
тором прерываний с заданной дискретностью по времени. В прерываниях
34
этого таймера будет вызываться программа
_logger, которая будет наблюдать
значение счетчика более медленного таймера 2 и значение второго таймера,
захваченное модулем захвата и обработанное в процедуре обработки преры-
вания по захвату 4-ого модуля с кнопки платы сопряжения. При написании
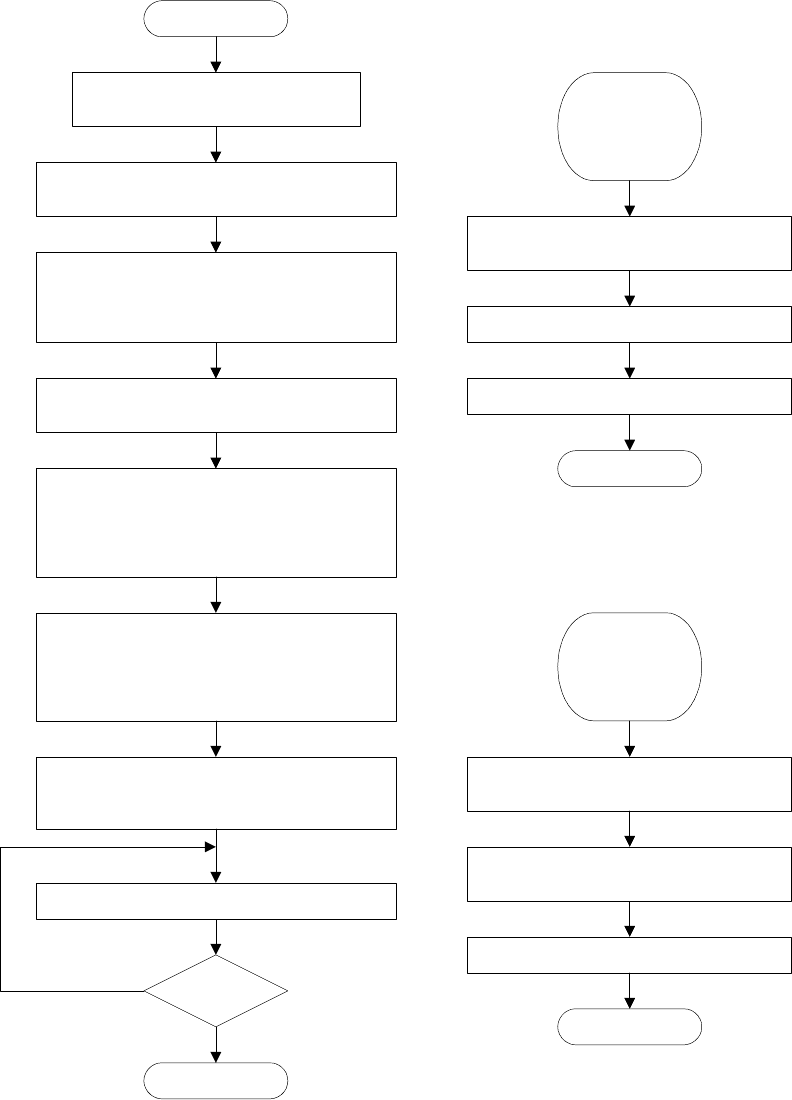
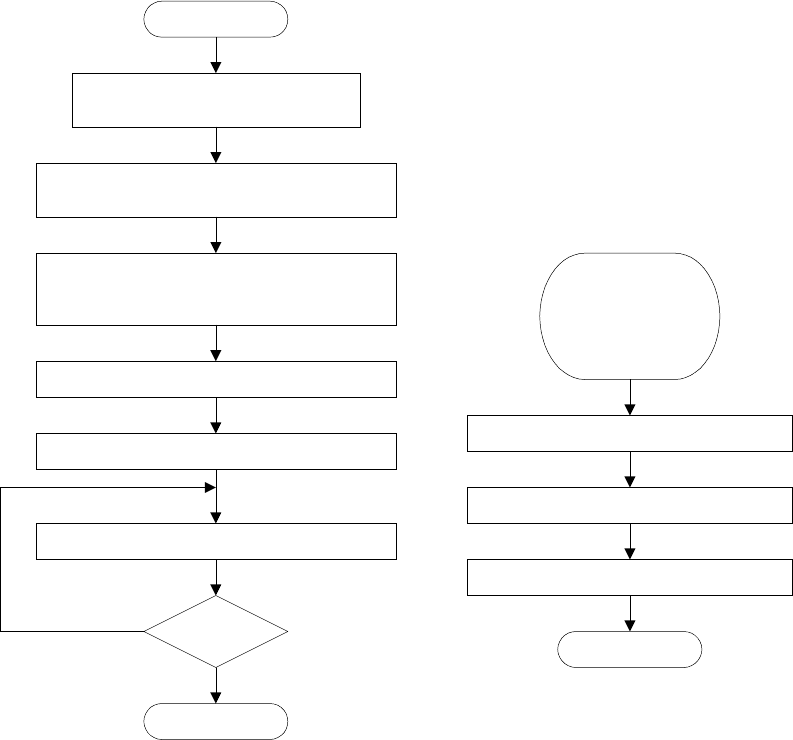
программы можно воспользоваться следующим алгоритмом.
Инициализация переменной _stop;
инициализация программы _logger
Начало
Инициализация вывода CAP4
на спец-функцию
_stop == 0
Конец
false
true
Разрешение прерываний по периоду 1-ого
таймера (EVIMRA); загрузка в таблицу
векторов (TPINT1) адреса процедуры
обработки прерывания по периоду
1-ого таймера
Разрешение прерывний 2-ого уровня (IMR);
разрешение прерывний 4-ого уровня (IMR);
разрешение маскируемых прерываний (INTM)
Вызов программы "Монитор"
Процедура
обработки
прерывания по
периоду первого
таймера
Сохранение значения счетчика второго
таймера для осциллографирования
Восстановление контекста
Возврат из ПОП
Инициализация регистра управления
захватом (CAPCON)
Инициализация периодов 1-ого и 2-ого
таймеров, счетчиков и регистров управления
таймерами
(T1PR, T2PR, T1CNT, T2CNT, T1CON, T2CON)
Разрешение прерываний по захвату 4-ого
модуля (EVIMRC); загрузка в таблицу
векторов (CAPINT4) адреса процедуры
обработки прерывания по захвату
4-ого модуля
Вызов программы _logger
Процедура
обработки
прерывания по
захвату 4-ого
модуля
Сохранение значения счетчика второго
таймера для осциллографирования
Восстановление контекста
Возврат из ПОП
Очистка FIFO и флагов прерываний 4-ого
модуля захвата
35
Лабораторно-практическая работа №7
Модуль «квадратурной» обработки сигналов импульсных
датчиков положения
1. Использование отладочной среды MCWIN
Запустите программу Procev.exe. На панели управления выберите при-
ложение для изучения
модуля «квадратурной» обработки сигналов ИДП.
Ознакомьтесь с методикой программирования модуля захвата, используя
МСК240 Руководство пользователя.
2. Программирование модуля «квадратурной» обработки
сигналов ИДП с использованием платы сопряжения
Устройство QEP, когда разрешена его работа, считает и декодирует
«квадратурно» закодированные входные импульсы на ножках
CAP1/QEP1 и
CAP2/QEP2. Устройство QEP используется для подключения к оптическому
датчику для получения информации о положении и скорости вращающейся
машины. Конфигурирование бит регистра
CAPCON необходимо, чтобы раз-
решить работу
QEP и запретить работу модулей захвата 1 и 2, таким обра-
зом, связывая две ножки модуля захвата для работы с декодером
QEP. Счет-
чиком импульсов для
QEP служит таймер общего назначения GP2 или GP3,
в зависимости от программного задания битовой конфигурации регистра
T2CON или T3CON, или оба таймера, объединенные как 32-разрядный тай-
мер. Выбранный таймер должен быть установлен по способу счета как
ре-
версивный счетчик
(Directional-Up/Down) с устройством QEP, как источ-
ником тактовых импульсов
.
2.1. QEP декодирование
Квадратурные сигналы – это две последовательности импульсов с пе-
ременной частотой и с фиксированной фазой – сдвиг на четверть периода (90
градусов). Когда сигнал сгенерирован оптическим датчиком на оси двигате-
ля, направление вращения двигателя может быть определено по фазе следо-
вания сигналов, а угловое положение и скорость могут быть определены чис-
лом импульсов и частотой импульсов. Направление вращения может быть
определено
QEP следующим образом: QEP отслеживает направление и
формирует сигнал задания направления счета на входе
TMRDIR. Таймер
общего назначения, установленный по способу счета как реверсивный счет-
чик, (Directional-Up/Down) считает «вверх», если ведущая последователь-
ность на входе
CAP1/QEP1, и «вниз», если ведущая последовательность на
входе
CAP2/QEP2.
Оба перепада сигналов на вводах считаются устройством
QEP. Поэто-
му, частота генерируемых тактирующих сигналов для таймера общего назна-
чения в четыре раза больше, чем каждой из входных последовательностей.
Тактирующий сигнал соединяется с входом таймера общего назначения или
32-разрядным таймером.
36
2.2. Работа таймера общего назначения с устройством QEP
Выбранный таймер общего назначения всегда начинает считать с те-
кущей величины, находящейся в счетчике. Желаемая величина может быть
загружена в выбранный таймер общего назначения до разрешения работы
QEP. Важно заметить, что режим счета Directional-Up/Down выбранного
таймера общего назначения при работе с устройством
QEP отличается от
обычного режима Directional-Up/Down. Таймер, выбранный для
QEP, считая
«вверх», не останавливается при достижении значения периода, и меняет на-
правление счета только при изменении чередования импульсов. Если началь-
ная величина таймера общего назначения больше или равна величине в реги-
стре периода, то таймер будет считать «вверх» до FFFFh (или до FFFFFFFFh,
если используется 32-разрядный таймер), а затем обнулится. Когда таймер
считает в обратном направлении («вниз»), то он перейдет к FFFFh (или до
FFFFFFFFh, если используется 32-разрядный таймер), если определено на-
правление счета «вниз».
3. Задание для выполнения в лаборатории
3.1. Напишите программу, которая при вращении двигателя вручную полу-
чает сигнал с ИДП, обрабатывает его модулем QEP и осциллографирует этот
сигнал.
Для этого запустите таймер общего назначения так, чтобы он вызывал
прерывание через равные промежутки времени. В этом прерывании будет
работать осциллографирование, с помощью которого будет наблюдаться со-
стояние счетчика таймера, работающего в квадратурном режиме.
3.2. Дополните предыдущую программу подключением готового модуля
измерения скорости.
Для подключения модуля скорости требуется перевести таймер 1 в ре-
жим счета циклический вверх/вниз с периодом счета 1000 (это необходимо,
так как модуль использует этот таймер для вычисления времени между паке-
тами импульсов в расчете, что частота ШИМ 10 кГц). В процедуру обслужи-
вания прерывания по заему первого таймера следует вставить вызов макроса
SPEED_IN_PWM_INT. Следует отметить, что, так как модуль разрабаты-
вался для TMS320F241 и не рассчитан для работы с программой «Монитор»
и программой
_logger для MCK240, то результат расчета скорости может
быть не всегда достоверный. Выходной переменной измерителя скорости
служит
omega_h, omega_l, где хранится величина скорости в относительных
единицах. Следует помнить, что модуль настроен для работы с ИДП 10000
импульсов на оборот (2500 меток), когда в лаборатории стоят датчики 2000
импульсов (500 меток), при 3-х парах полюсов двигателя (в лаборатории дви-
гатели с одной парой полюсов).
Ссылки на все необходимые переменные и адреса содержатся в файле
speed.h. Прерывание по сравнению таймера, работающего в квадратурном
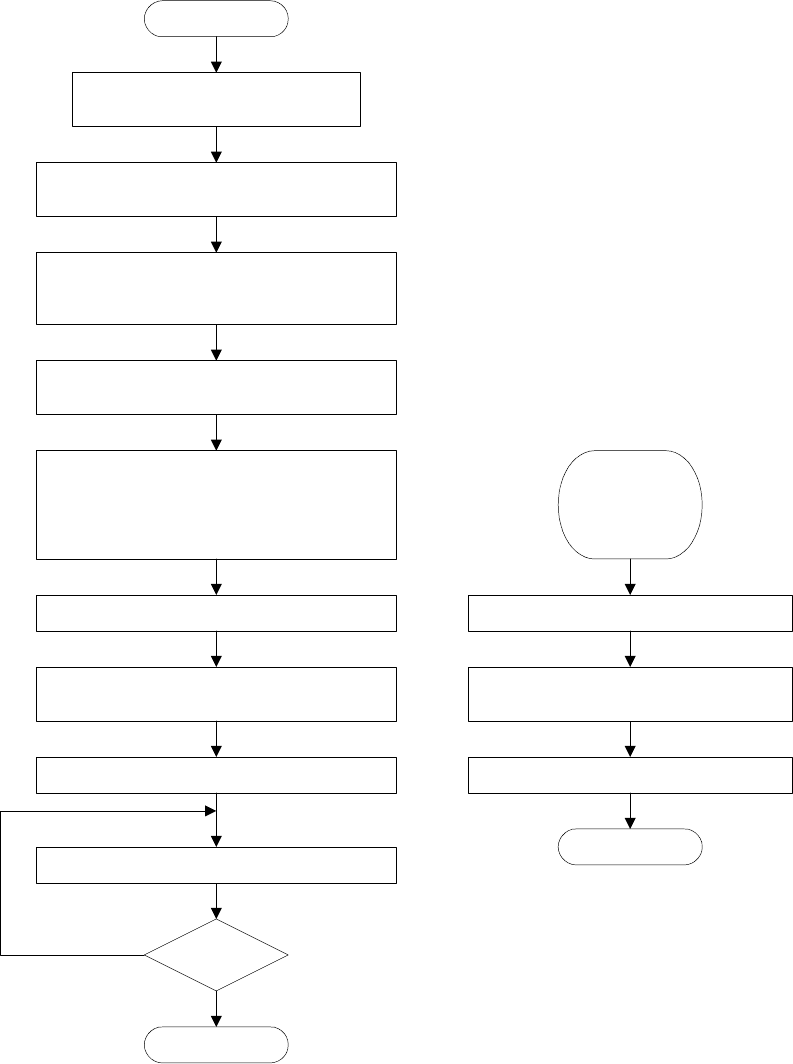
37
режиме, инициализируется при вызове процедуры инициализации модуля
скорости. Сам обработчик прерывания находится непосредственно в модуле.
Инициализация переменной _stop;
инициализация программы _logger
Начало
Инициализация выводов модулей захвата
на спец-функцию
_stop == 0
Конец
false
true
Разрешение прерываний по заему 1-ого
таймера (EVIMRA); загрузка в таблицу
векторов (TUFINT1) адреса процедуры
обработки прерывания по заему
1-ого таймера
Разрешение маскируемых прерываний (INTM)
Вызов программы "Монитор"
Процедура
обработки
прерывания по
заему первого
таймера
Макрос SPEED_IN_PWM_INT
Восстановление контекста
Возврат из ПОП
Инициализация регистра управления
захватом (CAPCON)
Инициализация периода 1-ого таймера,
счетчика и регистра управления таймера
(T1PR, T1CNT, T1CON)
Разрешение прерывний 2-ого уровня (IMR)
Программный делитель частоы для
вызова программы _logger
Вызов процедуры инициализации
модуля измерения скорости speed_init
38
Лабораторно-практическая работа №8
Ввод аналоговых сигналов. Программирование аналого-
цифрового преобразователя
1. Использование отладочной среды MCWIN
Запустите программу Procev.exe. На панели управления выберите при-
ложение для изучения
модуля АЦП. Ознакомьтесь с методикой программи-
рования модуля захвата, используя
МСК240 Руководство пользователя.
2. Программирование модуля АЦП с использованием платы
сопряжения
Аналого-цифровой преобразователь (АЦП) – это 10-разрядный преоб-
разователь с внутренним устройством хранения выборки. Модуль АЦП со-
стоит из двух 10-разрядных преобразователей, каждый из которых мультип-
лицирован на 8 каналов. Максимальное время преобразования 6,6 мкс. Зада-
ние опорного напряжения должно идти от внешнего источника питания.
Опорное напряжение ограничивается в пределах 0 – 5 В.
Возможности и параметры АЦП состоят в следующем:
9 8 аналоговых входов на каждом модуле АЦП, образующих таким обра-
зом 16 каналов аналогового ввода;
9 одновременное измерение двух аналоговых сигналов с использованием
модулей АЦП;
9 непрерывное и одиночное преобразование;
9 преобразование может быть запущено программно, от внутреннего со-
бытия и/или от внешнего события;
9 блок преобразования из аналогового сигнала в цифровой;
9 двухуровневые регистры хранения результатов, которые содержат
цифровые значения завершенного преобразования;
9 два программируемых регистра управления модулями АЦП;
9 работы по прерыванию или опросу.
Цифровой результат процесса преобразования для 10-разрядного АЦП
аппроксимируется следующим выражением:
напряженийзадающихРазность
напряжениеВходное
результатЦифровой ×=1023
В таблице 1 приведены адреса регистров АЦП.
Таблица 1. Адреса регистров АЦП
Адрес Регистр Название
7032h ADCTRL1 Регистр 1 управления АЦП
7034h ADCTRL2 Регистр 2 управления АЦП
7036h ADCFIFO1 Двухуровневый стек регистрации данных для АЦП1
7038h ADCFIFO2 Двухуровневый стек регистрации данных для АЦП2
39
3. Задание для выполнения в лаборатории
3.1. Напишите программу, которая при регулировании напряжения с по-
мощью потенциометра, расположенного на плате сопряжения (5-ый канал
АЦП), регистрирует входной сигнал с помощью АЦП и осциллографирует
его. Для запуска АЦП используйте событие заема таймера.
Инициализация переменной _stop;
инициализация программы _logger
Начало
Инициализация АЦП на запуск от второго
таймера по заему (GPTCON)
_stop == 0
Конец
false
true
Разрешение прерываний по заему 1-ого
таймера (EVIMRA); загрузка в таблицу
векторов (TUFINT1) адреса процедуры
обработки прерывания по заему
1-ого таймера
Разрешение маскируемых прерываний (INTM)
Вызов программы "Монитор"
Процедура
обработки
прерывания по
заему первого
таймера
Проверка готовности результата и
чтение из регистра FIFO (ADCFIFO1)
Восстановление контекста
Возврат из ПОП
Инициализация регистров АЦП
(ADCTRL2, ADCTRL1)
Инициализация периода 1-ого таймера,
счетчика и регистра управления таймера
(T1PR, T1CNT, T1CON)
Разрешение прерывний 2-ого уровня (IMR)
Вызов программы _logger
3.2. Напишите программу, работающую в режиме автосканирования АЦП.
Данные следует осциллографировать в прерывании по завершению преобра-
зования АЦП. Настройте делитель частоты АЦП так, чтобы можно было ус-
петь отследить программным осциллографом процесс изменения сигнала с
потенциометра.
40
Инициализация переменной _stop;
инициализация программы _logger
Начало
_stop == 0
Конец
false
true
Загрузка в таблицу векторов (ADCINT)
адреса процедуры обработки прерывания
по завершению преобразования АЦП
Разрешение маскируемых прерываний (INTM)
Вызов программы "Монитор"
Процедура
обработки
прерывания по
завершению
преобразования
АЦП
Чтение из регистра FIFO (ADCFIFO1)
Восстановление контекста
Возврат из ПОП
Инициализация регистров АЦП
(ADCTRL2, ADCTRL1)
Разрешение прерывний 6-ого уровня (IMR)
Вызов программы _logger
Содержание
Лабораторно-практическая работа №1 ................................................................. 3
Лабораторно-практическая работа №2 ............................................................... 18
Лабораторно-практическая работа №3 ............................................................... 21
Лабораторно-практическая работа №4 ............................................................... 25
Лабораторно-практическая работа №5 ............................................................... 28
Лабораторно-практическая работа №6 ............................................................... 33
Лабораторно-практическая работа №7 ............................................................... 35
Лабораторно-практическая работа №8 ............................................................... 38