Беляев Е.Ф., Шулаков Н.В., Дискретно-полевые модели электрических машин, учебное пособие
Подождите немного. Документ загружается.

ebr=ebr+e(j)-e(j+36)+e(j+72)-e(j+108);
end
forj=5:16
ecr=ecr-e(j)+e(j+36)-e(j+72)+e(j+108);
end
if m==l
zll=eas/ias; z21=ebs/ias; z31=ecs/ias; z41=ear/ias; z51=ebr/ias;
z61=ecr/ias; ias=0.; ibs=l.; ics=0.; iar=0.; ibr=0.; icr=0.;
end
if m==2
zl2=eas/ibs; z22=ebs/ibs; z32=ecs/ibs; z42=ear/ibs; z52=ebr/ibs;
z62=ecr/ibs; ias=0.; ibs=0.; ics=l.; iar=0.; ibr=0.; icr=0.;
end
if
m--==3
zl3=eas/ics; z23=ebs/ics; z33=ecs/ics; z43=ear/ics; z53=ebr/ics;
z63=ecr/ics; ias=0.; ibs=0.; ics=Q.; iar=l.; ibr=0.; icr=0.,
end
if m==4
zl4=eas/iar; z24=ebs/iar; z34=ecs/iar; z44=ear/iar; z54=ebr/iar;
z64=ecr/iar; ias=0.; ibs=0.; ics=0.; iar=0.; ibr=l.; icr=0.;
end
if m~~5
zl5=eas/ibr; z25=ebs/ibr; z35=ecs/ibr; z45=ear/ibr; z55=ebr/ibr;
z65=ecr/ibr; ias=0.; ibs=0.; ics=0.; iar=0.; ibr=0.; icr=l.;
end
if m==6
z!6=eas/icr; z26=ebs/icr; z36=ecs/icr; z46=ear/icr; z56=ebr/icr;
z66=ecr/icr;
end
m=m+l;
if m==7
aa=zeros(4);
aa(l,l)=z21-z22-zl l+zl2+zsa+zsb; aa( 1,2)=z23-z22-z
13+z
12+zsb;
aa( 1,3)=z24-z25-z 14+z 15;
aa(
1,4)=z26-z25-z 16+z 15;
aa(2,1 )=z21 -z22-z31 +z32+zsb; aa(2,2)=z23-z22-z33+z32+zsb+zsc;
aa(2,3)=z24-z25-z34+z35; aa(2,4)=z26-z25-z36+z35;
aa(3,1 )=z51-z52-z41 +z42; aa(3,2)=z53-z52-z43+z42;
aa(3,3)=z54-z55-z44+z45+zra+zrb; aa(3,4)=z56-z55-z46+z45+zrb;
aa(4,1 )=z51 -z52-z61 +z62; aa(4,2)=z53-z52-z63+z62;
aa(4,3)=z54-z55-z64+z65+zrb; aa(4,4)=z56-z55-z66+z65+zrb+zrc;
bb=zeros(4,l);
bb(l,l)=uab; bb(2,l)=ucb; bb(3,l)=0.; bb(4,l)=0.; xx=aa\bb;
ias=xx(l,l); ics=xx(2,l); iar=xx(3,l); icr=xx(4,l); ibs=-ias-ics; ibr=-iar-icr;
end
end
disp(abs(ias)); disp(abs(iar)); ia=abs(ias); ib=abs(ibs); ic=abs(ics);
ua=-eas+ias*zsa; ub=-ebs+ibs*zsb; uc=-ecs+ics*zsc;
sa=ua*conj(ias); sb=ub*conj(ibs); sc=uc*conj(ics); s$=sa+sb+sc; sss=abs(ss);
ps=real(ss); cosfi=ps/sss; pem=ps-rs*(ia
A
2+ib
A
2+ic
A
2); mem=pem*pp/omO;
pr=pem*(l.-s); eta=pr/ps; disp(abs(ua)); disp(abs(ub)); disp(abs(uc));
disp(ps); disp(pr); disp(cosfi); disp(eta); disp(mem);
nl(nn)=s; nl(nn)=s; n2(nn)=abs(ias); n3(nn)=ps; n4(nn)=pr;
n5(nn)=real(eta); n6(nn)=cosfi; n7(nn)=real(mem); n8(nn)=om;
s=s+dels; nn=nn+l;
end
plot(n7,n8)
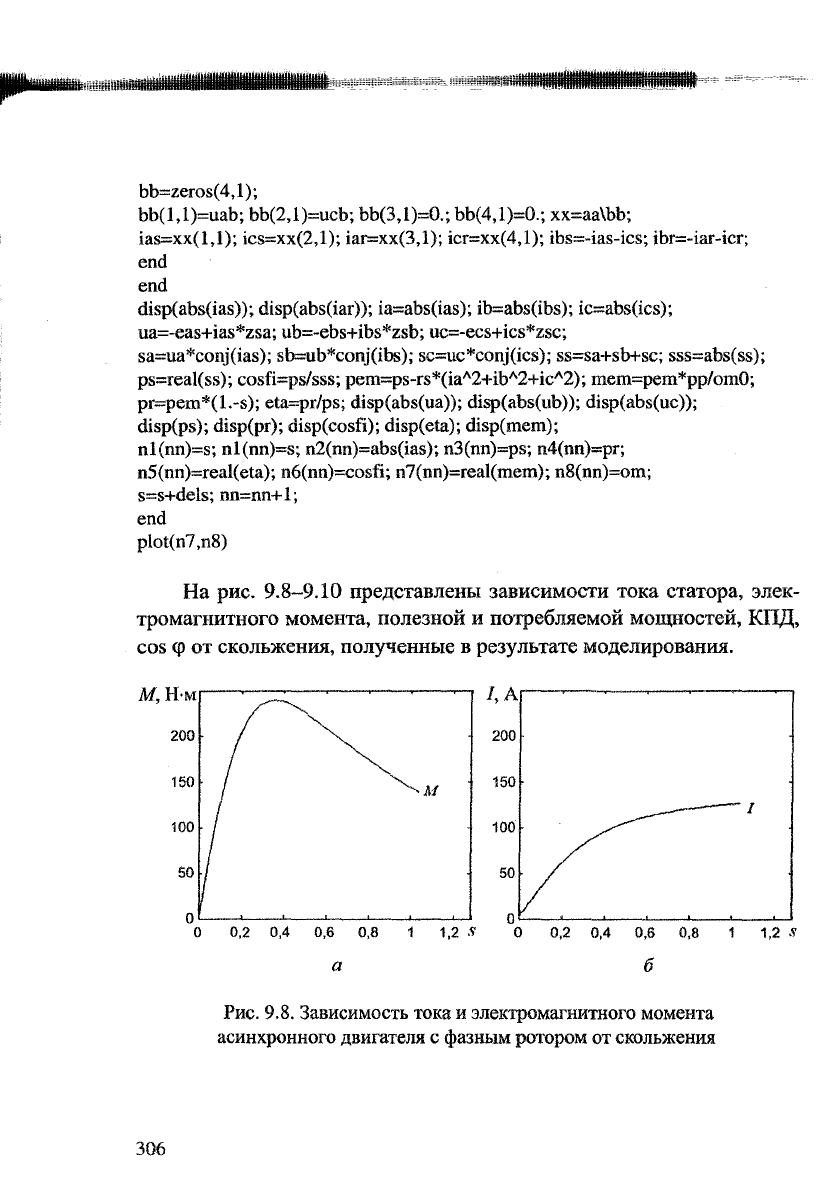
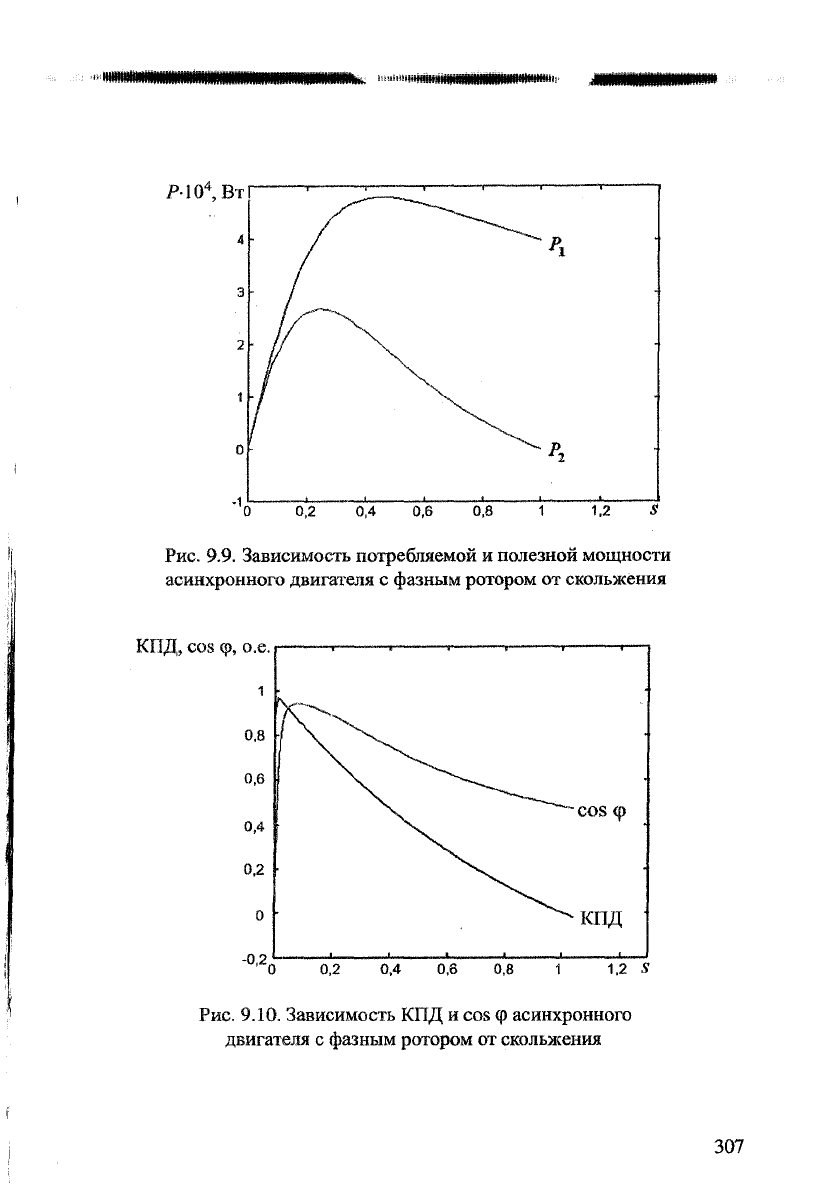
На рис. 9.8-9.10 представлены зависимости тока статора, элек-
тромагнитного момента, полезной и потребляемой мощностей, КПД,
cos
<р
от скольжения, полученные в результате моделирования.
а б
Рис. 9.8. Зависимость тока и электромагнитного момента
асинхронного двигателя с фазным ротором от скольжения
IK цмпмвйшвпППМШШД!"»»
Рис. 9.9. Зависимость потребляемой и полезной мощности
асинхронного двигателя с фазным ротором от скольжения
Рис. 9.10. Зависимость КПД и cos
<р
асинхронного
двигателя с фазным ротором от скольжения
Следует отметить, что некоторые величины, полученные в ре-
зультате моделирования, незначительно отличаются от каталожных
данных. Это обстоятельство объясняется неполной информацией
справочника: отсутствуют данные о потерях в стали, механических
потерях и ряд других параметров.
Пусковые характеристики асинхронного двигателя с фаз-
ным ротором. Изменяя величину активного сопротивления в цепи
ротора асинхронного двигателя с фазным ротором, можно изменять
жёсткость его механических характеристик. Это свойство двигателей
широко используется на практике для регулирования частоты вра-
щения - так называемый реостатный способ регулирования. Вклю-
чение активных сопротивлений в роторную цепь двигателя исполь-
зуется и при его пуске. При пуске двигателя с закороченной обмот-
кой ротора величина пускового тока может достигать 5-10 значения
номинального, а пусковой момент составляет 0,5-1,5 номинального
значения. Малая величина пускового момента при больших значени-
ях пускового тока определяется низким значением cos ф при пуске
вследствие большой частоты тока ротора. Включение в цепь ротора
активных сопротивлений позволяет одновременно снизить величину
пускового тока и увеличить значение момента.
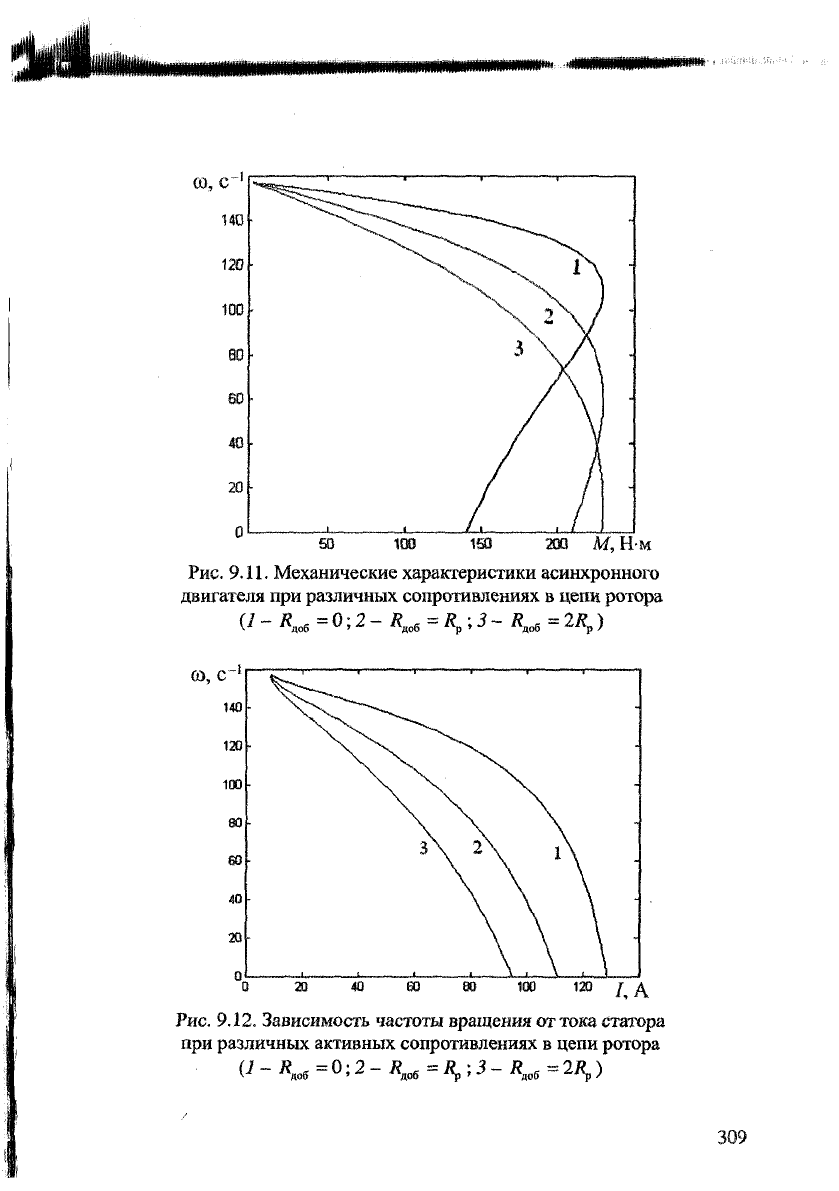
На рис. 9.11 представлено семейство механических характери-
стик моделируемого двигателя при различных величинах добавоч-
ных сопротивлений в цепи ротора.
На рис. 9.12 показаны зависимости частоты вращения от фазно-
го тока статора для различных величин сопротивлений, включённых
в роторную цепь двигателя.
Рассматриваемая математическая модель может быть использо-
вана для моделирования механических переходных процессов, в ча-
стности, переходного процесса асинхронного двигателя при реостат-
ном пуске. Для этого математическая модель должна быть дополнена
уравнением движения
r
rift)
J-— = М
№
- Мват , (9.36)
(О,
с
-1
140
120
100
ВО
ВО
40
20
° 50 100 150 200
М, Н-М
Рис. 9.11. Механические характеристики асинхронного
двигателя при различных сопротивлениях в цепи ротора
=0;2- R
w6
=R
p
;3~ Я
доб
= 2Л
р
)
со, с
-1
140
120
100
80
Ю
40
20
0
0 20 40 60 00 100 120 / Д
Рис. 9.12. Зависимость частоты вращения от тока статора
при различных активных сопротивлениях в цепи ротора
U - Коб =
0
; 2 - я
да6
- Я,; 3 - я
до6
= 2R,)
с заданием момента инерции и момента нагрузки. Кроме того, долж-
ны быть заданы пиковый момент и соотношение между величинами
сопротивлений пускового реостата.
Фрагмент программы механического переходного процесса при
реостатном пуске двигателя, которым должна быть дополнена её ос-
новная часть:
-=dt* (em-mn) /mi; disp (t); disp (om); disp (em);
if
em<=mp
np=np+l;
rr=rr/kr;
dom=0.; end
if
np>=3
kr=l.;
rr=rr/kr;
mp=mn; end
om=om+dom; t=t+dt; nn=nn +1; nl (nn) =t; n2 (nn) =om; n3 (nn) =em;
end
plot (nl,n2,nl,n3)
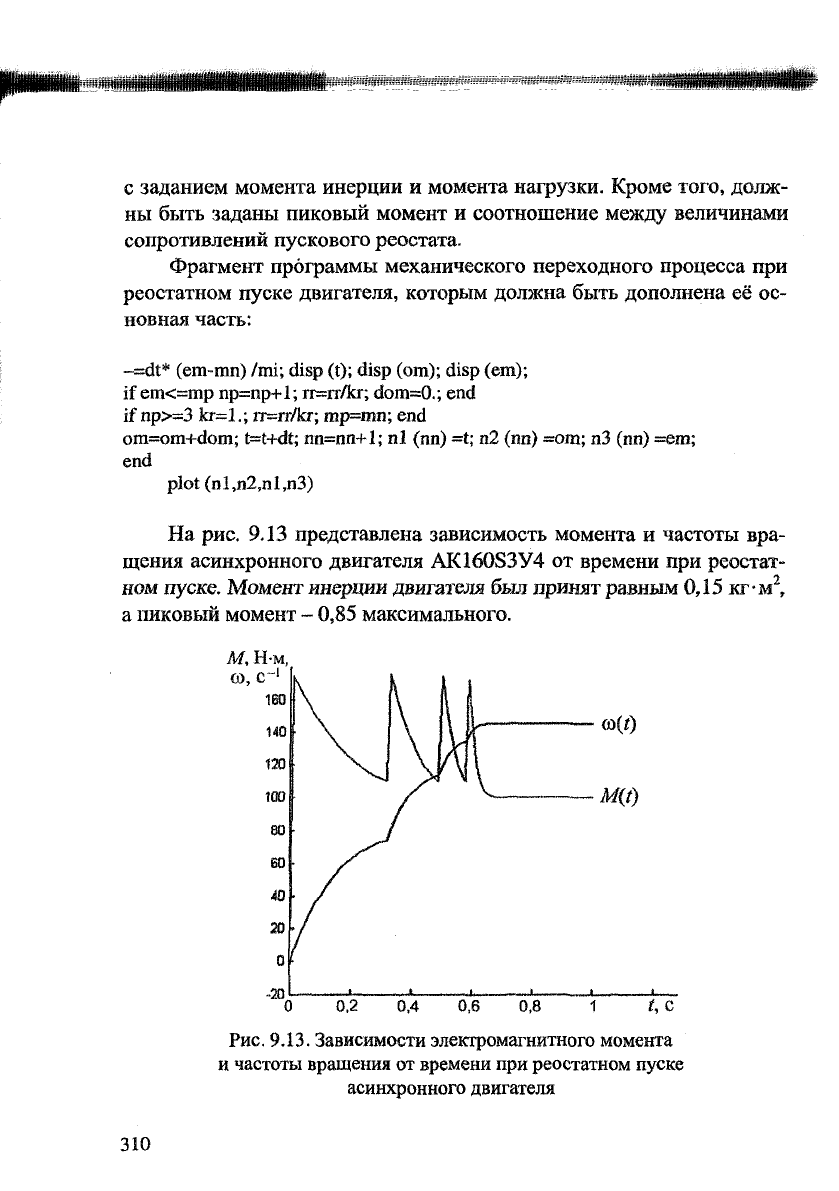
На рис. 9.13 представлена зависимость момента и частоты вра-
щения асинхронного двигателя AK160S3Y4 от времени при реостат-
ном пуске. Момент инерции двигателя был принят равным 0,15 кг-м
2
,
а пиковый момент - 0,85 максимального.
М, Н-м,
Рис. 9.13. Зависимости электромагнитного момента
и частоты вращения от времени при реостатном пуске
асинхронного двигателя
При больших инерционных массах рабочего механизма требуется
обеспечить плавный запуск асинхронного электродвигателя. Для этой
цели в цепь ротора обычно включают индуктивные сопротивления, па-
раллельно или последовательно с активными сопротивлениями. Индук-
тивные сопротивления, величина которых зависит от частоты тока,
в этом случае играют роль автоматического регулятора тока ротора.
В начале пуска, при большой частоте тока, индуктивное сопротивление
имеет большую величину, и пусковой ток двигателя ограничен. По мере
разгона частота тока ротора уменьшается, индуктивное сопротивление
также уменьшается, вследствие чего величина тока ротора и момента
двигателя поддерживаются приблизительно на постоянном уровне.
По окончании разгона
цепь
ротора закорачивается.
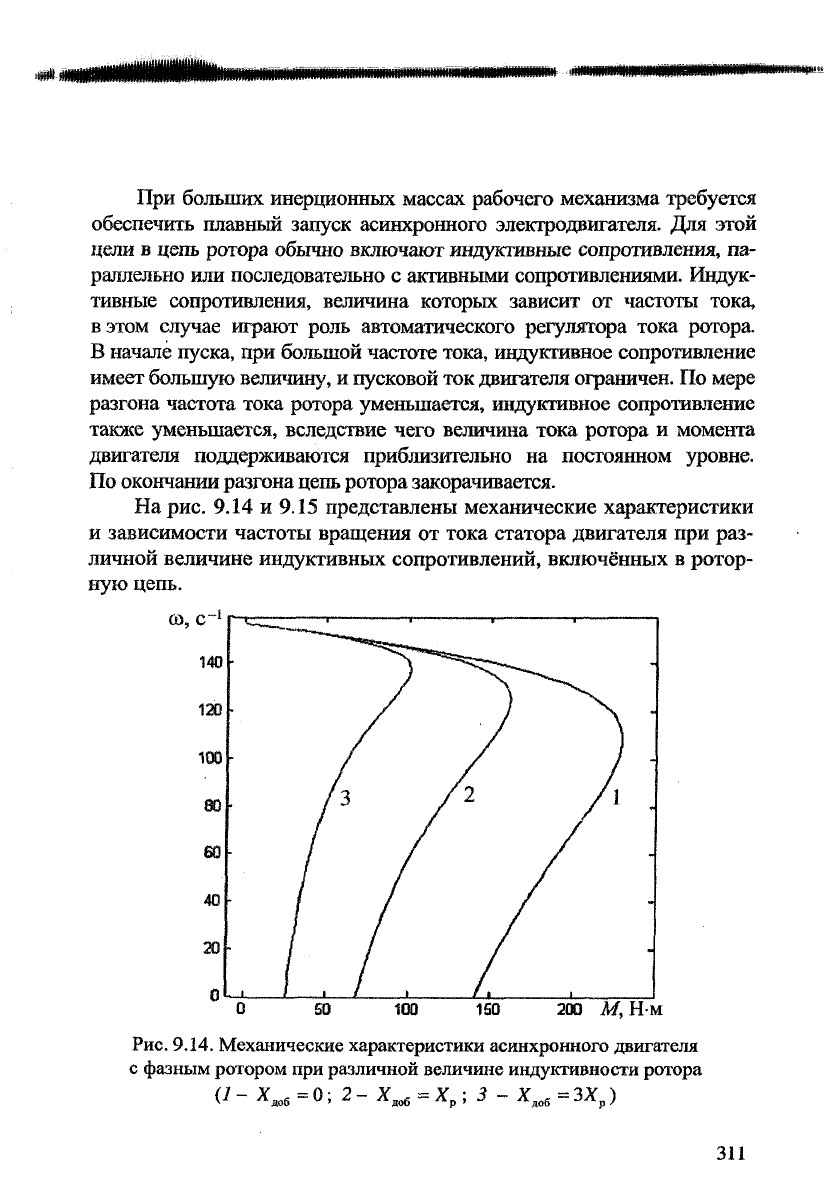
На рис. 9.14 и 9.15 представлены механические характеристики
и зависимости частоты вращения от тока статора двигателя при раз-
личной величине индуктивных сопротивлений, включённых в ротор-
(1 ~ -ХДАБ - 0; 2 - Х
яоб
- Х
р
; 3 - Х
ДО6
- ЗХ
р
)
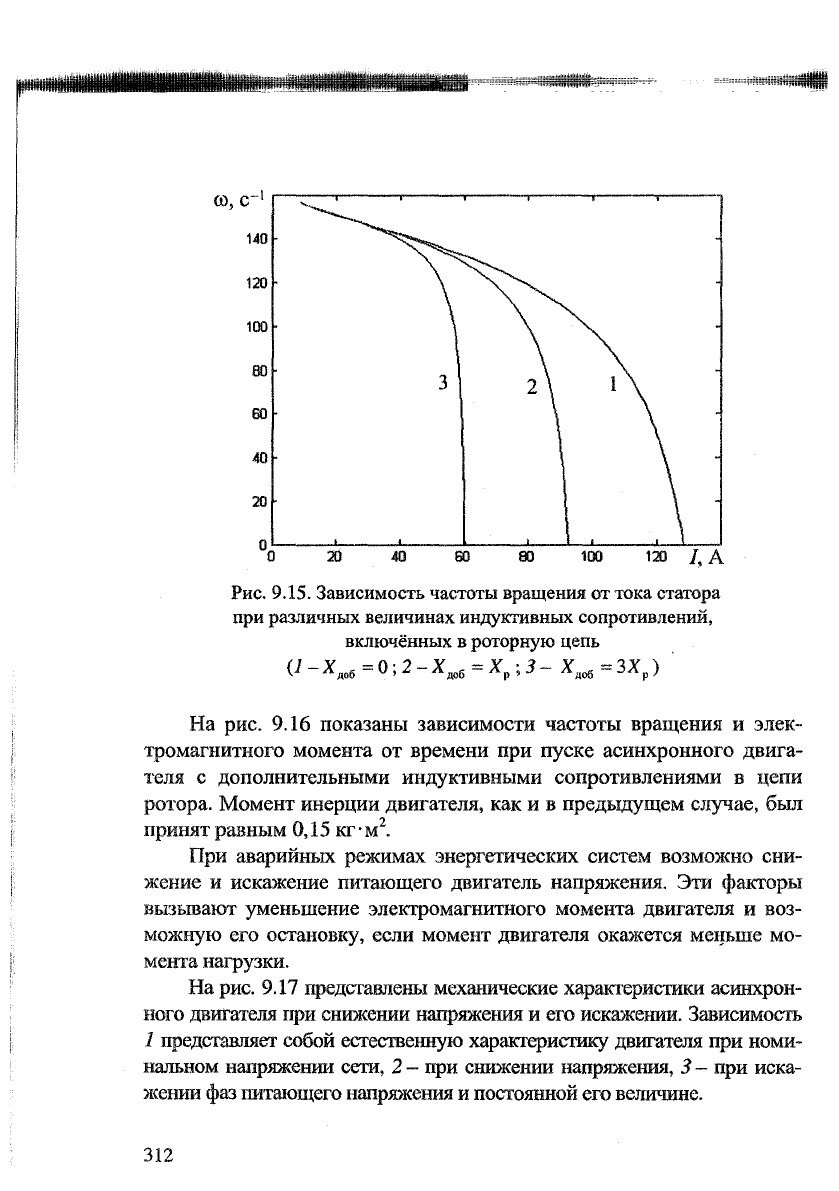
Рис. 9.15. Зависимость частоты вращения от тока статора
при различных величинах индуктивных сопротивлений,
включённых
в
роторную цепь
(1-Х
яо6
=0 ;2-Х
до6
=Х
р
;3- Х
доб
=ЗХ
р
)
, На рис. 9.16 показаны зависимости частоты вращения и элек-
j тромагнитного момента от времени при пуске асинхронного двига-
теля с дополнительными индуктивными сопротивлениями в цепи
ротора. Момент инерции двигателя, как и в предыдущем случае, был
j принят равным 0,15 кг м
2
.
При аварийных режимах энергетических систем возможно сни-
| жение и искажение питающего двигатель напряжения. Эти факторы
вызывают уменьшение электромагнитного момента двигателя и воз-
можную его остановку, если момент двигателя окажется меньше мо-
I мента нагрузки.
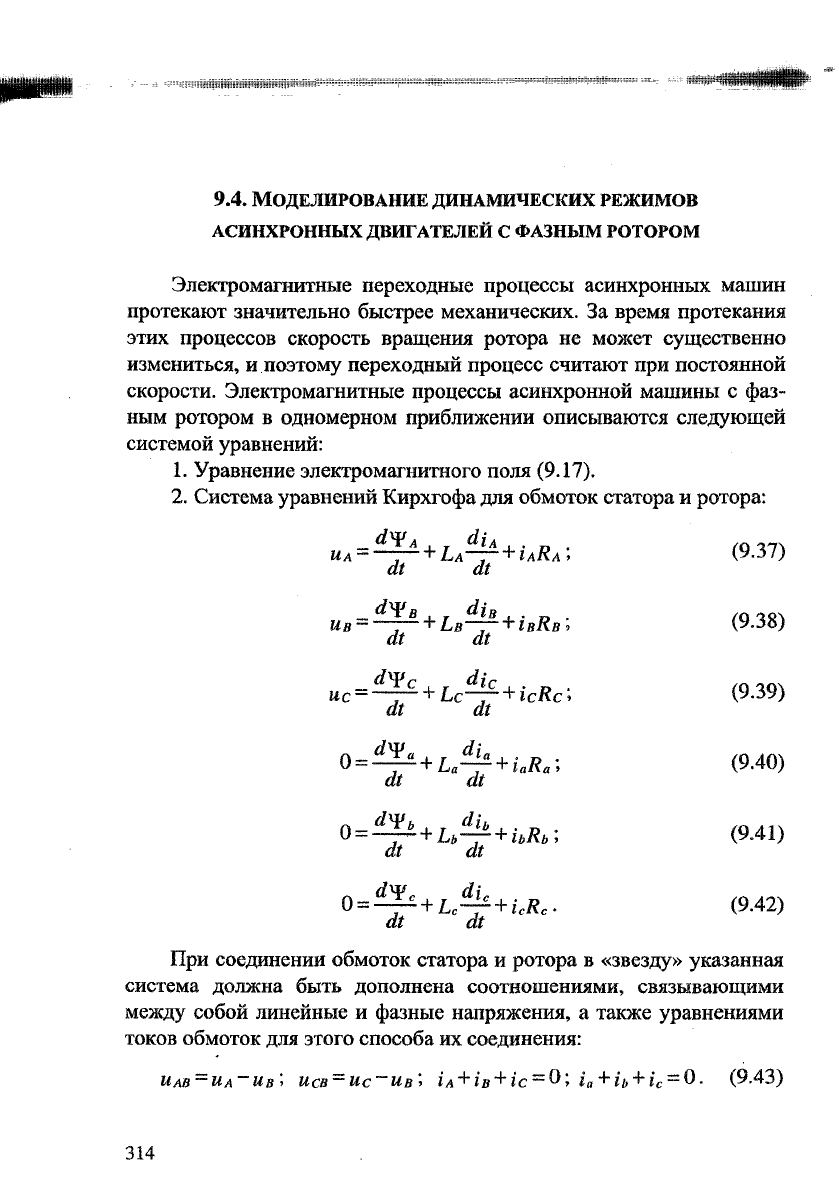
На рис. 9.17 представлены механические характеристики асинхрон-
ного двигателя при снижении напряжения и его искажении. Зависимость
j 1 представляет собой естественную характеристику двигателя при номи-
нальном напряжении сети, 2 - при снижении напряжения, 3 - при иска-
жении фаз питающего напряжения и постоянной его величине.
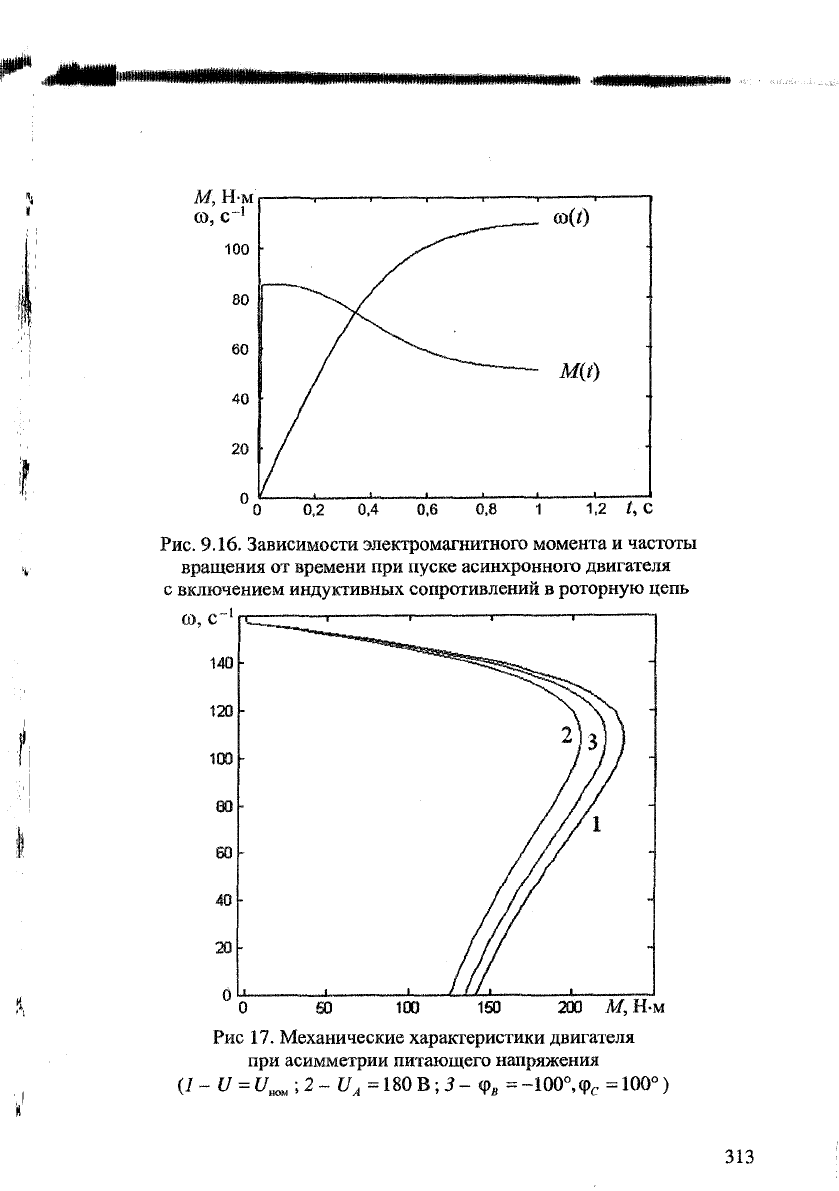
Рис. 9.16. Зависимости электромагнитного момента и частоты
вращения от времени при пуске асинхронного двигателя
с включением индуктивных сопротивлений в роторную цепь
Рис 17. Механические характеристики двигателя
при асимметрии питающего напряжения
(/ - U
=
и
иш
;
2 - U
A
= 180 В; 3 - <р
в
= -100°,
Фс
= 100°)
9.4. МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ РЕЖИМОВ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ
Электромагнитные переходные процессы асинхронных машин
протекают значительно быстрее механических. За время протекания
этих процессов скорость вращения ротора не может существенно
измениться, и поэтому переходный процесс считают при постоянной
скорости. Электромагнитные процессы асинхронной машины с фаз-
ным ротором в одномерном приближении описываются следующей
системой уравнений:
1. Уравнение электромагнитного поля (9.17).
2. Система уравнений Кирхгофа для обмоток статора и ротора:
ua^^ + LA^ +
IARA-,
(9-37)
dt dt
ив
—
+ + IBRB ; (9.38)
dt dt
uc^^ + Lc^ + ictfc; (9-39)
dt dt
0 = ^+L
B
^ + i
a
R
a
-, (9.40)
dt dt
° = ^T
t +
Lb~- + hRb-, (9.41)
dt dt
^
= + +
icRc
•
(9.42)
dt dt
При соединении обмоток статора и ротора в «звезду» указанная
система должна быть дополнена соотношениями, связывающими
между собой линейные и фазные напряжения, а также уравнениями
токов обмоток для этого способа их соединения:
Uab
=
ua~u
b
> ucb
=
Uc~ub\
1л
+
iB
+ ic = 0; j
0
+ i
b
+ j
(
. = 0. (9.43)