Biringen S., Chow C.-Y. An Introduction to Computational Fluid Mechanics by Example
Подождите немного. Документ загружается.

162 VISCOUS FLUID FLOWS
Plot this quantity as a function of η for water, air, and mercury, and then give a
physical interpretation of the result.
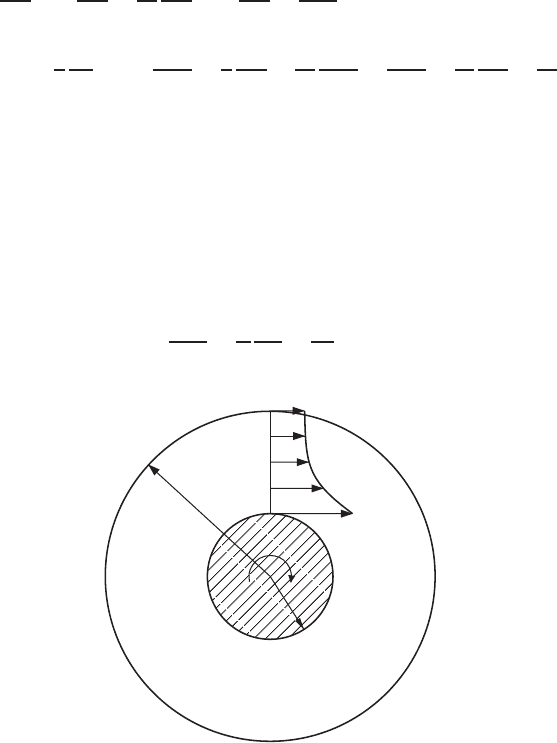
Problem 3.5 Consider a layer of fluid around an infinitely long circular cylin-
der of radius r
b
. Radial gravitational forces hold the fluid in a state of static
equilibrium, forming a free surface of radius r
a
, as shown in Fig. 3.3.1. The fluid
has a constant density ρ and viscosity coefficient μ. When the cylinder is given
a rotational motion about its axis, a fluid motion v
θ
is induced in the azimuthal
direction. The θ component of the Navier-Stokes equation in cylindrical coordi-
nates is (from Hughes and Gaylord, 1964, p. 25)
ρ
∂v
θ
∂t
+v
r
∂v
θ
∂r
+
v
θ
r
∂v
θ
∂θ
+v
z
∂v
θ
∂z
+
v
r
v
θ
r
=−
1
r
∂p
∂θ
+μ
∂
2
v
θ
∂r
2
+
1
r
∂v
θ
∂r
+
1
r
2
∂
2
v
θ
∂θ
2
+
∂
2
v
θ
∂z
2
+
2
r
2
∂v
r
∂θ
−
v
θ
r
2
(3.3.18)
Because of the axisymmetry of the flow on the r-θ plane, derivatives with respect
to θ and z are all zero, and there are no motions in radial and axial directions.
When a steady state is reached, all terms in (3.3.18) vanish, except the first two
and the last one in the parentheses on the right-hand side.
If the constant tangential speed at the surface of the cylinder is v
b
,wemay
introduce a dimensionless radial distance R = r/r
b
and a dimensionless speed
V = v
θ
/v
b
, so that the resultant equation becomes
d
2
V
dR
2
+
1
R
dV
dR
−
V
R
2
= 0 (3.3.19)
F
r
e
e
s
u
r
f
a
c
e
r
a
v
θ
v
b
r
b
FIGURE 3.3.1 Fluid motion around a rotating cylinder.

PIPE AND OPEN-CHANNEL FLOWS 163
The boundary conditions are, with R
a
representing r
a
/r
b
,
V = 1atR = 1 (3.3.20)
dV
dR
= 0atR = R
a
(3.3.21)
The second condition simply states that shear stress must vanish at the free
surface. If such a stress did exist, no tangential force could be generated above
the free surface to balance it, and the equilibrium condition could never be
attained.
Divide the fluid region into 50 equally spaced radial intervals and find the
velocity distribution for R
a
= 2 by use of the subroutine TRID. Compute local
percent errors from the exact solution that
V =
R
a
1 + R
2
a
R
R
a
+
R
a
R
(3.3.22)
Notice that if a diagram similar to Fig. 2.2.1 is constructed, the fluid region
should be contained between R
0
and R
n
, leaving R
n+1
as a fictitious point to
handle the derivative boundary condition at the free surface.
It is interesting to see that, from (3.3.22) or the numerical result, the fluid
layer will not rotate with the cylinder like a solid body under the steady state.
This result analogously explains why, even in the absence of differential solar
heating and many other factors, our atmosphere can never achieve a solid-body
rotation with the earth.
3.4 PIPE AND OPEN-CHANNEL FLOWS
With properly chosen geometries, the equations governing some viscous flows
may become linearized. One example is given by Problem 3.5 in the preceding
section; it concerns the angular motion of fluid between two concentric circles.
In this section a class of flows is considered whose governing equation is linear
but involves two independent variables.
We consider the general problem of steady incompressible flow through a
straight pipe of uniform but arbitrary cross section. The flow may be caused
by either an applied pressure gradient, the gravitational force, the motion of a
part of the pipe wall relative to the rest, or any combination of these factors.
The flow may be enclosed by a rigid wall or it may have a free surface. More-
over, the flow may contain multiply connected regions formed by axial inner
tubes.
Let the infinitely long pipe be parallel to the x-axis along which ∂V/∂x = 0.
Because of this particular geometry, the flow has only one nonvanishing velocity
component u in the axial direction, so that the continuity equation (3.1.6) is
satisfied automatically and the nonlinear terms on the left side of momentum
164 VISCOUS FLUID FLOWS
equation (3.1.7) disappear. There is only one equation governing u of the form
∂
2
u
∂y
2
+
∂
2
u
∂z
2
=
1
μ
dp
dx
−f
x
(3.4.1)
where the x component of the gravitational force per unit volume, f
x
, has been
added. It turns out that we have a Poisson equation to which the iteration methods
developed in Section 2.8 apply.
If f
x
= 0 and the pipe cross section is circular, (3.4.1) describes the classi-
cal problem of the Poiseuille flow, whose analytical solution can be obtained
immediately. Although (3.4.1) is a linear equation, to find its analytical solution
satisfying a set of arbitrary boundary conditions is still a difficult task. Numeri-
cal solution of (3.4.1) is generally required except for a few cases in which the
cross-sectional shape can be described by some simple geometries.
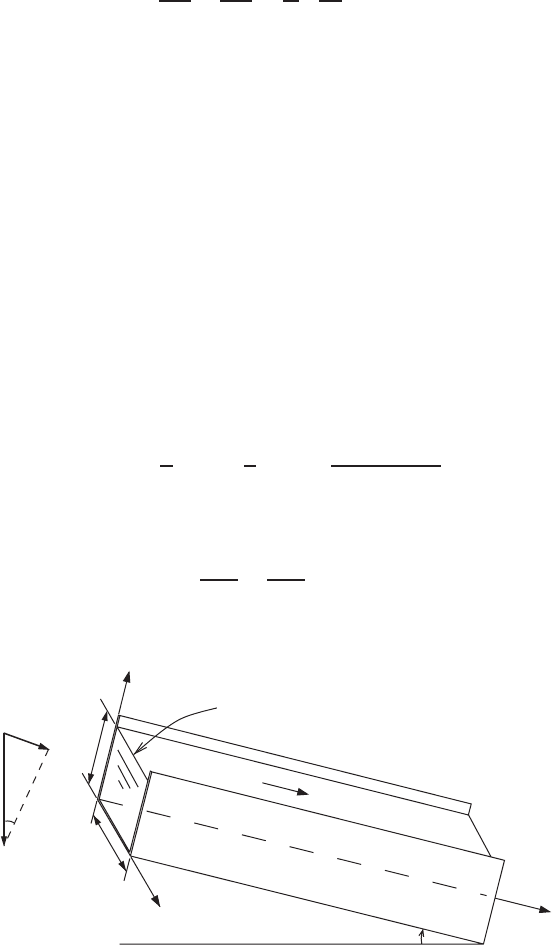
As an illustrative example for solving this class of problems, we consider a
tilted open channel of square cross section making an angle θ with the horizontal
(Fig. 3.4.1). The x axis is still chosen to be parallel to the channel, and the angle θ
is assumed to be so small that the free surface is everywhere parallel to the chan-
nel base. Since there is no applied pressure gradient along the channel, the only
forcing function on the right side of (3.4.1) is that due to f
x
= ρg sin θ, g being
the gravitational acceleration. With the introduction of dimensionless variables
Y =
y
L
, Z =
z
L
, U =
u
L
2
ρg sin θ/μ
(3.4.2)
where L is the width or height of the square cross section, (3.4.1) becomes
∂
2
U
∂Y
2
+
∂
2
U
∂Z
2
=−1 (3.4.3)
ρ
g
sin θ
θ
ρg
Horizontal line
Free Surface
u
θ
x
y
L
0
L
z
FIGURE 3.4.1 An open-channel flow.

PIPE AND OPEN-CHANNEL FLOWS 165
Boundary conditions require that velocity vanishes at solid walls and shear stress
is zero at the free surface, or, mathematically,
U = 0atY = 0andatZ = 0 and 1 (3.4.4)
∂U
∂Y
= 0atY = 1 (3.4.5)
For a numerical solution a square grid system is set up to cover the region
occupied by the fluid in the Y -Z plane. With the grid size h = 0.05, we obtain
21 (= m) vertical grid lines and 21 (= n) horizontal grid lines. Because of the
derivative boundary condition (3.4.5), a fictitious horizontal line is needed at
a distance h above the free surface. Comparing (3.4.3) with the generalized
form (2.8.1) of the Poisson equation, we can write down its finite-difference
computational scheme based on the successive overrelaxation formula (2.8.13):
U
i, j
= (1 −ω)U
i, j
+
ω
4
U
i−1,j
+U
i+1,j
+U
i,j−1
+U
i,j+1
+h
2
(3.4.6)
Here the superscripts used in (2.8.13) to indicate the number of iterations are
omitted; they are not needed if in each iteration (3.4.6) is applied successively at
interior points starting from the lower left corner of the grid. The optimum value
for the relaxation parameter ω is determined according to (2.8.14).
In index notation the boundary conditions (3.4.4) become
U
i,1
= 0, i = 1, 2, ..., m (3.4.7)
U
1, j
= U
m, j
= 0, j = 1, 2, ..., n (3.4.8)
After replacing the derivative in (3.4.5) by its central-difference approximation,
the derivative boundary condition is reduced to
U
i, n+1
= U
i, n−1
, i = 2, 3, ..., m − 1 (3.4.9)
In the program to follow the conditions (3.4.7) and (3.4.8) are assigned at the
beginning and are kept the same for all iterations, while (3.4.9) is used in the
computation of (3.4.6) in every iteration whenever j reaches the value n.
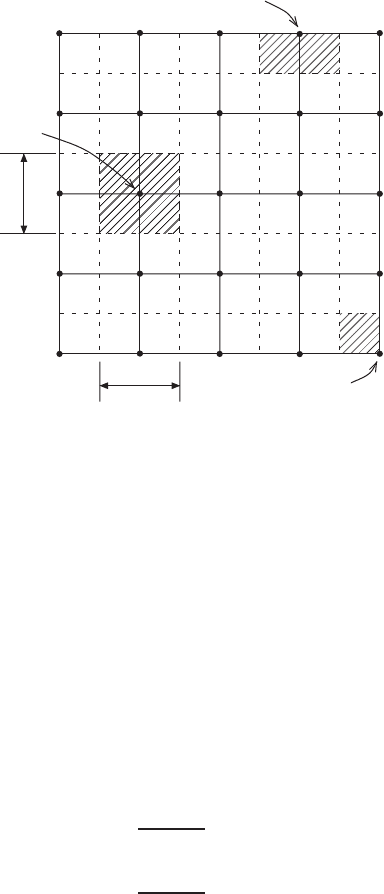
Knowing the velocity distribution across a section, we can calculate the vol-
ume of fluid passing through the channel per unit time. Let the solid lines in
Fig. 3.4.2 represent schematically the grid system covering the channel cross
section. Dashed vertical and horizontal lines are then drawn to bisect the solid-
line square meshes.
At each of the grid points marked at the intersections of solid lines, the dimen-
sionless velocity U is either given or computed. These points may be grouped
into three categories according to their locations: the interior points, the bound-
ary points, and the corner points, as indicated in Fig. 3.4.2. For small mesh sizes
we may assume that the velocity in the shaded area containing a grid point is
approximately the same as that at the point itself. As shown in the figure, the
shaded small area for an interior point is of magnitude h
2
, that for a boundary
166 VISCOUS FLUID FLOWS
h
Boundary Point
Corner Point
h
Interior
Point
FIGURE 3.4.2 Evaluation of volume flow rate.
point is h
2
/2, and that for a corner point is h
2
/4. The volume flow rate is cal-
culated approximately by summing the products of local velocity and area at all
grid points.
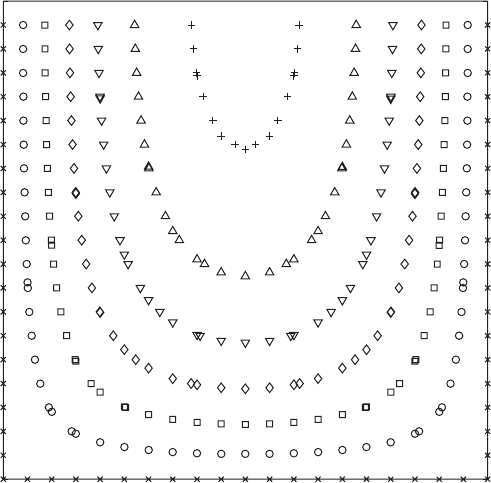
In the output of Program 3.3 some of the numerical values of U are tabulated
(Table 3.A.3) and, in addition, velocity contours are plotted in Fig. 3.4.3. Variables
used in this program are named according to their original forms; the name
VOLRAT is used for the volume flow rate.
The result shows that the maximum velocity occurs at the middle of the free
surface having the magnitude 0.114 L
2
ρg sin θ/μ, and the volume flow rate is
0.0569 L
4
ρg sin θ/μ. It is interesting to compare this result with the analytical
result obtained for the same free-surface flow with the two side walls removed.
The velocity profile and volume flow rate in such a channel of width L are, from
Batchelor (1967, p. 183), expressed in our notation,
u =
ρg sin θ
2μ
y(2L −y) (3.4.10)
Q =
ρg sin θ
3μ
L
4
(3.4.11)
The maximum velocity at the free surface is then 0.5 L
2
ρg sin θ/μ,whichis
4.4 times the value in the presence of two side walls separated by a distance
equal to the fluid depth, and the flow rate becomes 5 times bigger. The compar-
ison reveals that the side walls have a tremendous retardative effect on channel
flows.
PIPE AND OPEN-CHANNEL FLOWS 167
1
0
1
FIGURE 3.4.3 Velocity distribution across an open channel of square cross section. ×,
U = 0;
◦
, U = 0.018; , U = 0.036; ♦, U = 0.054; ∇, U = 0.072; , U = 0.09; +, U = 0.108.
Problem 3.6 Consider a channel with a square cross section of area L
2
having
a movable upper wall. Find the velocity distribution and the volume flow rate of
the steady flow caused by moving the upper wall at a constant velocity u
0
in the
direction parallel to the channel length.
Assume that the gaps between the moving and the stationary side walls are
smaller than the grid width h. The boundary condition on the uppermost grid
line is that the velocity is u
0
at all grid points except those at the corners, where
the velocity is zero.
Problem 3.7 Solve the problem in which the upper movable wall described in
Problem 3.6 is replaced by one of width L/2, leaving the uncovered portion of
the leveled upper fluid surface free. Study the variation of flow rate with the
horizontal position of the upper plate whose axial velocity is kept at the same
value u
0
.
Project for Further Study: A steady flow is established in a long pipe after a
constant pressure gradient dp/dx has been applied along the axis for a long time.
Compute the velocity distribution and the volume flow rate of an incompressible
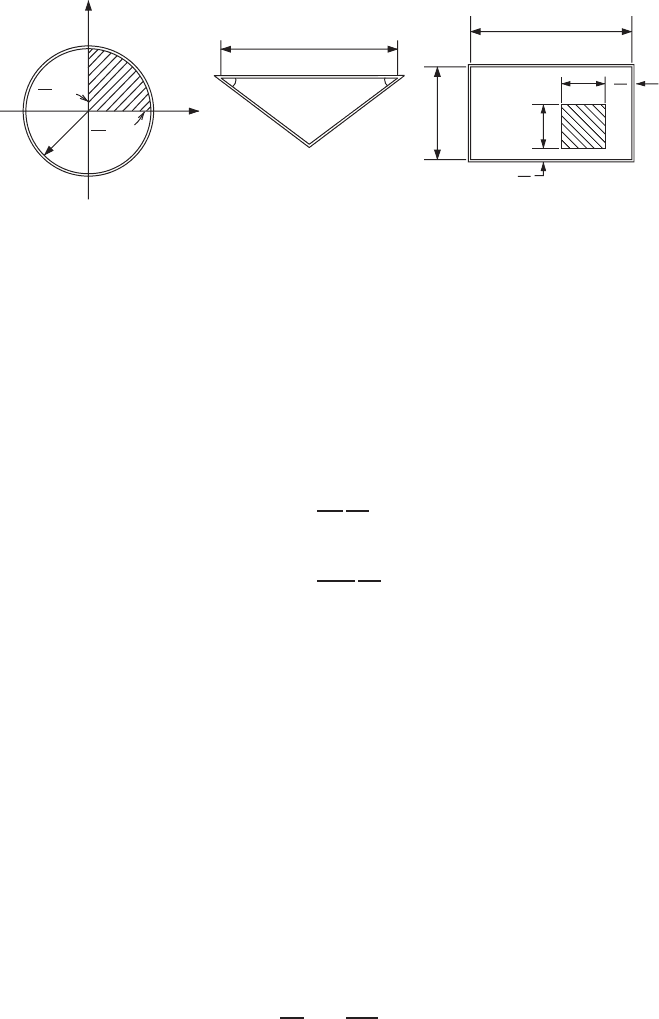
fluid in pipes of the cross-sectional shapes described in Fig. 3.4.4.
168 VISCOUS FLUID FLOWS
(a)(b)(c)
y
x
L
2a
a
a
a
4
a
2
3a
R
= 0 45°
45°
= 0
∂u
∂z
∂u
∂y
FIGURE 3.4.4 Various tube cross sections.
1. A circular tube of radius R. From symmetry only the first quadrant is
needed for the numerical computation. The boundary conditions at the two
straight edges of the fan-shaped domain are that the variations of velocity
normal to the edges are zero. To handle the curved boundary, the method
of Program 2.7 may be used.
Compare the numerical result with the analytical solution for Poiseuille
flow (Batchelor, 1967, p. 180) that
u =−
1
4μ
dp
dx
R
2
−r
2
Q =−
πR
4
8μ
dp
dx
2. A triangular tube whose two slant walls make 45
◦
angles with the third.
3. A rectangular tube containing a square inner tube.
3.5 EXPLICIT METHODS FOR SOLVING PARABOLIC
PARTIAL DIFFERENTIAL EQUATIONS—GENERALIZED
RAYLEIGH PROBLEM
In studying the development of a boundary layer on a body moving through
an incompressible fluid, Rayleigh (1911) considered the unsteady motion of an
infinitely extended fluid in response to an infinite flat plate suddenly set in motion
along its own plane. If the plate is normal to the y axis and the motion is in
the x direction, the continuity equation (3.1.6) is satisfied automatically and the
incompressible Navier-Stokes equation (3.1.7) is simplified to
∂u
∂t
= ν
∂
2
u
∂y
2
(3.5.1)
EXPLICIT METHODS FOR SOLVING PARABOLIC PARTIAL DIFFERENTIAL EQUATIONS 169
Sometimes this equation, governing arbitrary unsteady planar fluid motions, is
expressed in terms of vorticity ζ(=−∂u/∂y) in the form
∂ζ
∂t
= ν
∂
2
ζ
∂y
2
(3.5.2)
which describes the diffusion of vorticity through a one-dimensional space.
According to the discussions of Section 2.7, both (3.5.1) and (3.5.2) are classi-
fied as parabolic partial differential equations. Here we will construct a numerical
scheme for solving (3.5.1), examine its computational stability, and then apply it
to a particular physical problem.
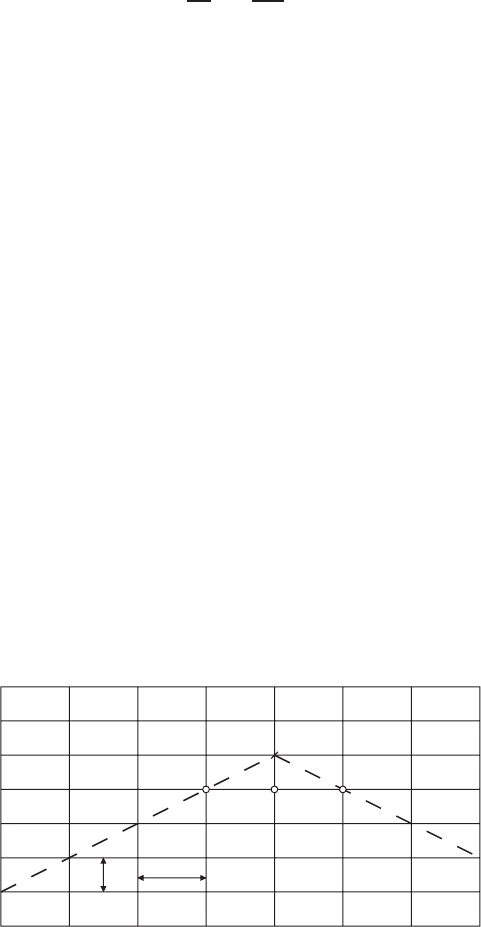
In numerical computations the space coordinates must be finite. Let us assume
that the fluid above the plate at y = 0 is bounded below a finite depth that
is divided into m − 1 equally spaced intervals of size h. If the time axis is
divided into steps of size τ , a grid system is formed, as shown in Fig. 3.5.1.
To approximate (3.5.1) by a finite difference equation at the grid point (i, j),
the second-order spatial derivative is replaced by the central-difference formula
(2.2.9) and the time derivative is replaced by the forward-difference formula
(2.2.6). After rearrangement the equation has the final form
u
i, j +1
= u
i, j
+R(u
i−1, j
−2u
i, j
+u
i+1, j
) (3.5.3)
in which R = ντ/h
2
is a dimensionless parameter. The equation states that the
solution at a certain height at time interval τ later can be computed based on the
present information at the local and two neighboring stations. For given boundary
conditions expressed as known functions of time, the solution at time level t
2
is
computed explicitly from the initial condition at t
1
by using (3.5.3). Repeating
the procedure for the successive time steps, the solution at any desired time level
can be obtained. For this property the method in which (3.5.3) is applied is called
an explicit method for solving the parabolic equation (3.5.1).
Playing a similar role as the Courant number C in (2.10.4), the parameter R in
(3.5.3) cannot be arbitrarily chosen, and the limitation imposed on its magnitude
(i + 1, j )
(i − 1, j )
(i, j )
(i, j + 1)
τ
y
1
y
i
h
y
2
t
j
t
2
t
1
y
m
FIGURE 3.5.1 An explicit method for solving parabolic equations.

170 VISCOUS FLUID FLOWS
is to be determined from a stability analysis of the numerical scheme. Following
the technique illustrated in Section 2.10, we assume
u
i, j
= U
j
e
Iikh
(3.5.4)
and obtain, after substituting into (3.5.3),
U
j+1
= [1 −2R(1 −cos kh)]U
j
(3.5.5)
The quantity contained within the brackets is the amplification factor λ.If|λ|> 1,
|U
j+1
|> |U
j
| and the amplitude of the solution becomes unbounded as j →∞.
This is called an unstable situation. Thus, for stability we require λ
2
≤ 1or,
consequently, after expanding the left-hand side,
R ≤
1
1 − cos kh
Since the lowest value of the expression on the right-hand side is 1/2 when
cos kh =−1, the stability criterion derived for (3.5.3) is
ντ
h
2
≤
1
2
(3.5.6)
When the upper limiting value is used for this parameter, (3.5.3) has a partic-
ularly simple form:
u
i, j +1
=
1
2
(u
i−1, j
+u
i+1, j
) (3.5.7)
This is called the Bender-Schmidt recurrence equation, which determines the
solution at (y
i
, t
j+1
) as the average of the values right and left of y
i
at a time t
j
.
However, more accurate results are obtained by using (3.5.3) for R < 1/2.
The differential equation (3.5.1) and its finite-difference approximation (3.5.3)
apply to any unsteady planar flows bounded by two parallel infinite plates per-
forming arbitrary parallel motions along their own planes. One of the plates may
be replaced by a free surface. Furthermore, with modifications to suit cylindrical
coordinates, the resulting equations apply to flows between concentric cylinders.
Solving for the velocity and the related fields of these flows may be classified as
the generalized Rayleigh problem.
For illustrative purposes we consider water contained between two originally
stationary flat plates separated by a distance of 1 m. At an initial instant t = 0,
the upper plate has suddenly acquired a constant speed u
0
(= 1m/s) while the
lower plate is kept stationary all the time. The sudden motion of the upper plate
creates a sharp velocity change there, forming a concentrated vortex sheet right
below the plate. The vorticity is diffused downward, according to (3.5.2), into
EXPLICIT METHODS FOR SOLVING PARABOLIC PARTIAL DIFFERENTIAL EQUATIONS 171
a region practically free of vorticity, and the velocity is redistributed accord-
ingly. We like to find numerically the velocity distribution across the channel at
different times.
In terms of the notation of Fig. 3.5.1, the initial velocity distribution is
u
i,1
= 0for1= 1, 2, ..., m −1
u
m,1
= u
0
and the boundary conditions are
u
1, j
= 0 for j > 1
u
m, j
= u
0
for j > 1
For water ν = 1 ×10
−6
m
2
/s, approximately. If the space between plates is
divided into 20 equal intervals, then m = 21 and h = 0.05 m. Let us choose
R = 1/4, which determines the time interval τ = Rh
2
/ν or 625 s. This time step
size seems to be rather large. But it is a reasonable size for a laminar shear
flow in which vorticity or velocity gradient is diffused purely by intermolecular
activities characterized by a small kinematic viscosity.
In the form shown in (3.5.3), the velocity field is a two-dimensional array. This
is not necessary, however, in programming for the computation. In Program 3.4
we use one-dimensional arrays
UOLD(I) and UNEW(I) to denote u
i, j
and u
i, j +1
,
respectively and overwrite them at successive time steps for efficient use of
computer memory. The solution for U is shown in Fig. 3.5.2 for the first five
curves.
The output (Table 3.A.4) shows that a velocity discontinuity cannot exist in
a viscous fluid and is smoothed out immediately by viscous diffusion. As time
progresses the velocity profile approaches a linear distribution that varies from 0
at the lower plate to 1 m/s at the upper and corresponds to the solution for the
Couette flow between two parallel plates in a steady shear motion.
Problem 3.8 Assign a value to R that is greater than 0.5, and then run Program
3.4 to watch the growth of the solution to some unrealistic magnitudes. The result
proves the validity of the stability criterion (3.5.6).
Problem 3.9 Find the velocity distribution at increasing times in the originally
stationary fluid around a circular cylinder with a free surface (Fig. 3.3.1) after
the cylinder is suddenly given a rotation of tangential speed v
b
at the surface.
As time approaches a very large value, the solution should approach that for
Problem 3.6.