Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.


158 THE FUNDAMENTAL PRODUCT OF GEOMETRIC ALGEBRA CHAPTER 6
as soon as X contains at least one common vector with A (and if both X and A were
bivectors in 3-D, this would always be the case). The easiest way to express the concept
of the rejection of a general blade X by a subspace A is simply as the difference of X and
its projection: X → X − (XA) A
−1
. However, this is not a proper subspace operation;
it does not necessarily produce a blade (see structural exercise 9), so it should be used
with care. The rejection is not as tidy as it appears at first sight, when we introduced
it for vectors.
6.4.3 THE OTHER DIVISION: REFLECTION
We have seen that the geometric product is noncommutative. This implies that geometric
division (which is just geometric multiplication by the inverse) is not commutative either.
We have also seen that division of (xa) by a on the r ight (i.e., right division) produces x,
as you would hope. Let us investigate the result of left division:
a
−1
xa = a
−1
(xa)
=
1
aa
a (xa)
= axa
1
aa
[since scalars commute]
= (ax) a
−1
= (a · x) a
−1
+ (a ∧ x) a
−1
= (x · a) a
−1
− (x ∧ a) a
−1
(6.28)
Compare this to the decomposition of (6.26) (which was made with right division):
(xa) a
−1
= (x · a) a
−1
+ (x ∧ a) a
−1
.
We observe that in (6.28) the non-a-component of x (which we called the rejection
of a)issubtracted from the projection of x onto a, rather than added. Figure 6.4 shows
a x
a
−
1
(x
?
a) /a
(x ∧ a) /a
x
a
Figure 6.4: Reflection of x in a.
SECTION 6.6 EXERCISES 159
the effect: the vector x is reflected in the a-line. Only when x and a have the same direction
is there no difference between the two types of div ision (but they then trivially both
result in x).
The bad news is that we have to be careful about the order of division, but the good news
is that we have found a simple way to make line reflections: we can reflect x through a by
sandwiching x between a and a
−1
as a
−1
xaor equivalently axa
−1
. This is actually one
of the basic constructions in geometric algebra, so common that it could be considered
as a product in its own right, the “versor product” of x by a. It can be extended to blades,
and is then a powerful way to represent orthogonal transformations.
The next chapter is fully devoted to this important operation.
6.5 FURTHER READING
With the geometr ic product, you are almost ready to read the literature on geometric
algebra. However, since that typically involves the special representations of operators by
rotors and versors, we recommend that you wait for one more chapter.
But if you are interested in the historical roots, an inspirational piece (without rotors) that
focuses on the development of number systems for geometry is David Hestenes’ Origins of
Geometric Algebra, Chapter 1 in [29]. It traces the developments from Euclid via Descartes
to Grassmann, and, implicitly, Clifford. Leo can recommend it as the piece that got him
hooked, back in 1997.
6.6 EXERCISES
6.6.1 DRILLS
1. Let a = e
1
+ e
2
and b = e
2
+ e
3
in a 3-D Euclidean space with orthonormal basis
{e
1
, e
2
, e
3
}. Compute the following expressions, giving the results relative to the
basis {1, e
1
, e
2
, e
3
, e
2
∧ e
3
, e
3
∧ e
1
, e
1
∧ e
2
, e
1
∧ e
2
∧ e
3
}. Show your work.
(a) aa
(b) ab
(c) ba
(d) (e
1
∧ e
2
) a
(e) a (e
1
∧ e
2
)
(f) (e
1
∧ e
2
∧ e
3
) a
(g) a
−1
(h) ba
−1
(i) (e
1
∧ e
2
)
−1

160 THE FUNDAMENTAL PRODUCT OF GEOMETRIC ALGEBRA CHAPTER 6
2. Make a full geometric product multiplication table for the 8 basis elements
{1, e
1
, e
2
, e
3
, e
1
∧ e
2
, e
2
∧ e
3
, e
3
∧ e
1
, e
1
∧ e
2
∧ e
3
}; (a) in a Euclidean metric R
3,0
and (b) in a metric R
2,1
with e
1
· e
1
= −1.
6.6.2 STRUCTURAL EXERCISES
1. Section 6.1.1 demonstrated the noninvertibility of contr action and outer prod-
uct. Show by a geometrical example that the cross product of two vectors is
not invertible either. Also give an algebraic argument based on its (invertible)
relationship to the outer product.
2. The pseudoscalar is the highest-order blade in the algebra of
R
n
.Itreceivesits
name because in many dimensions it is like a scalar in its commutation properties
with vectors under the geometric product. In which dimensions does it commute
with all vectors?
3. The outer product can be defined as the completely antisymmetric summed aver-
age of all permutations of geometric products of its factors, with a sign for each
term depending on oddness or evenness of the permutation. For the 3-blade, this
means:
x ∧ y ∧ z =
1
3!
(xyz− yxz+ yzx− zyx+ zxy− xzy)
Derive this formula.
4. The parts of a certain grade of a geometric product of blades are not necessarily
blades. Show that in a 4-D space w ith orthonormal basis {e
i
}
4
i=1
, a counterexample
is e
1
(e
1
+ e
2
)(e
2
+ e
3
)(e
1
+ e
4
)
2
. (You may want to use software for this. If you
find a simpler counterexample, let us know...)
5. Show that the definition of the scalar product as A∗ B = AB
0
is equivalent to the
determinant definition of (3.2). You will then also understand why the matr ix in
the latter definition has the apparently reversed a
i
·b
k−j
as element (i,j) for k-blades.
6. Originally, we motivated the contraction as the counterpar t of an outer product
relative to the scalar product, which led to the implicit definition (3.6):
(X ∧ A) ∗ B = X ∗ (AB).
Prove this part of the definition using the grade-based definitions of ∧, ∗, and in
Section 6.3.2.
7. In the formula (xA
−1
) A, we can replace the geometric product by a contrac-
tion, so that it is in fact the projection (xA
−1
)A. Show this, using the suggestion
that xA
−1
might be a subblade of A—which you first need to demonstrate. After
that, decompose xA
−1
as a product of orthogonal vectors, and evaluate the two
formulas to show their equivalence.
8. As a counterpart of the previous exercise, show that (x ∧ A
−1
) A = (x ∧ A
−1
)A.
(Hint: Write the second A as a wedge product of orthogonal vectors, and peel them
off one by one).

SECTION 6.7 PROGRAMMING EXAMPLES AND EXERCISES 161
9. In a 4-D space with orthonormal basis {e
i
}
4
i=1
, project the 2-blade X = (e
1
+ e
2
) ∧
(e
3
+ e
4
) onto the 2-blade A = (e
1
∧ e
3
). Then determine the rejection as the
difference of X and its projection. Show that this is not a blade. (See also structural
exercise 5 of Chapter 2.)
10. Let an orthonormal coordinate system {e
i
}
3
i=1
be given in 3-D Euclidean space R
3,0
.
Compute the support vector (i.e., the vector of the point on the line closest to the
origin) of the line with direction u = e
1
+ 2e
2
− e
3
, through the point p = e
1
− 3e
2
.
What is the distance of the line to the origin?
6.7 PROGRAMMING EXAMPLES AND EXERCISES
6.7.1 EXERCISE: SUBSPACE PRODUCTS RETRIEVED
The geometric product is the fundamental product of geometric algebra. Other products
are derived from it. In these exercises, we follow Section 6.3 and implement two different
ways of retrieving the left contraction and the outer product from the geometric product.
Exercise 1a: The Symmetry Approach (for Vectors Only)
Implement the outer product of a vector and any multivector using (6.10):
a ∧ B =
1
2
(aB+
Ba).
Implement the left contraction of a vector and any multivector using (6.12):
aB =
1
2
(aB−
Ba).
The downloadable example code provides a bare-bones framework for doing this. You
should complete the following functions:
// exercise 1a: complete in this function
mv outerProduct_1a(const e3ga::vector &a, const mv &B) {
printf("Warning: outerProduct_1a() not implemented yet!\n");
return 0.0f;
}
// exercise 1a: complete in this function
mv leftContraction_1a(const e3ga::vector &a, const mv &B) {
printf(
"Warning: leftContraction_1a() not implemented yet!\n");
return 0.0f;
}
After you have completed the functions, compile and run the example. The testing code
will complain if you made a mistake in the implementation. You may need the following
functions:
•
gradeInvolution(const mv &X) computes the grade involution of a multi-
vector.
162 THE FUNDAMENTAL PRODUCT OF GEOMETRIC ALGEBRA CHAPTER 6
•
gp(const mv &X, const mv &Y) computes the geometric product of two
multivectors. The
* operator is bound to it, see Table 2.4.
Exercise 1b: The Grade Approach
Equations (6.19) and (6.20) provide another way to obtain the outer product and the left
contraction, respectively:
A
k
∧ B
l
≡A
k
B
l
k+l
A
k
B
l
≡A
k
B
l
l−k
Implement this by filling in outerProduct_1b() and leftContraction_1b() in the
example code.
// exercise 1b: complete in this function
mv outerProduct_1b(const mv &A, const mv &B) {
printf("Warning: outerProduct_1b() not implemented yet!\n");
return 0.0f;
}
// exercise 1b: complete in this function
mv leftContraction_1b(const mv &A, const mv &B) {
printf("Warning: leftContraction_1b() not implemented yet!\n");
return 0.0f;
}
You may need the following functions:
•
takeGrade(const mv &X, int gradeUsageBitmap) extracts grade parts from
multivector. The
gradeUsageBitmap is a bit wise or of the constants GRADE_0,
GRADE_1, GRADE_2, and GRADE_3, which have values 1, 2, 4, 8, respectively. So,
to extract grade
k, you can also use takeGrade(X, 1 << k). In the context of
integers, the
<< operator means bitwise shift left, of course.
•
If you want to know whether a grade part is present in a multivector variable X,
you can use
((X.gu() & GRADE_k) != 0),wherek is the grade part index. For
example
((X.gu() & GRADE_2) != 0) is true when the bivector grade part is
present in
X.
6.7.2 GRAM-SCHMIDT ORTHOGONALIZATION
Geometric algebra does not require the representation of its elements in terms of a par-
ticular basis of vectors. Therefore, the specific treatment of issues like orthogonalization
are much less necessary. Yet it is sometimes convenient to have an orthogonal basis, and
such a basis is simple to construct using our products. We saw a first glimpse of this in the
example of Section 3.11.1, using the contraction. Now that we have the geometric product
we can give a more general and more complete treatment of orthogonalization.
SECTION 6.7 PROGRAMMING EXAMPLES AND EXERCISES 163
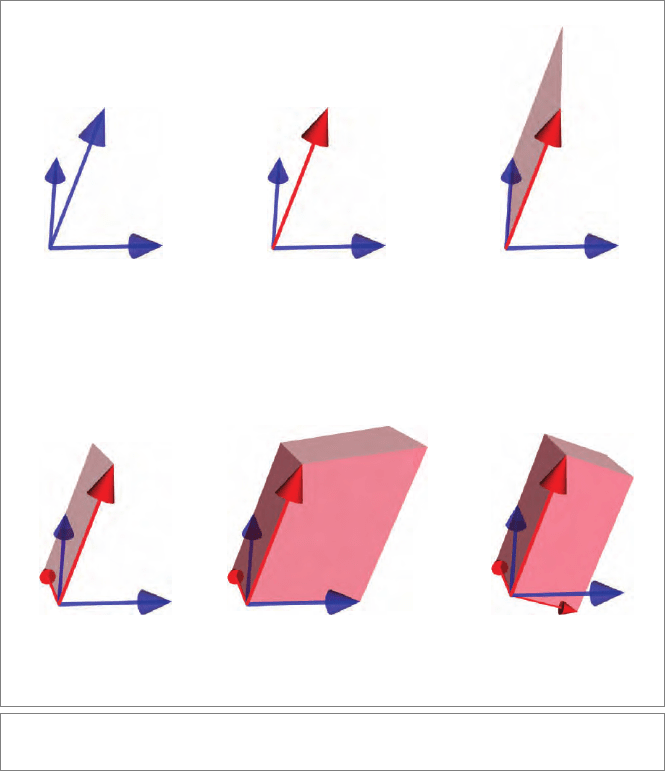
Suppose we have a set of three vectors v
1
, v
2
, v
3
in a Euclidean space, as in Figure 6.5(a),
and would like to form them into an orthogonal basis. The perpendicularized frame
will have its vectors denoted as b
1
, b
2
, b
3
;wearbitrarilykeepv
1
as the first of those
(Figure 6.5(b)):
b
1
≡ v
1
.
Then we form the rejection of v
2
by v
1
, which is automatically perpendicular to v
1
,by
forming v
2
∧ b
1
(Figure 6.5(c)) and dividing out b
1
to orthogonalize it (Figure 6.5(d)):
b
2
≡ (v
2
∧ b
1
)/b
1
v
3
v
2
v
1
v
3
v
2
v
1
b
1
v
3
v
2
v
1
b
1
v
3
v
2
v
1
b
1
b
2
v
3
v
2
v
1
b
1
b
2
v
3
v
2
v
1
b
1
b
2
b
3
(a) (b) (c)
(d) (e) (f)
Figure 6.5: Gram-Schmidt orthogonalization as repeated rejections (see text).
164 THE FUNDAMENTAL PRODUCT OF GEOMETRIC ALGEBRA CHAPTER 6
That is our second vector of the frame. Now we take the rejection of v
3
by b
1
∧ b
2
, which
is perpendicular to both b
1
and b
2
. Graphically, this is done by forming the t rivector
v
3
∧ b
1
∧ b
2
(Figure 6.5(e)), and straightening it by dividing it by b
1
∧ b
2
(Figure 6.5(f)).
Algebraically, b
3
is:
b
3
≡ (v
3
∧ b
1
∧ b
2
)/(b
1
∧ b
2
),
and we are done. This is the Gram-Schmidt or thogonalization procedure, rewritten in
geometric algebra.
Figure 6.6 gives code listing for orthogonalizing an n-dimensional basis. Note that we
view the selection of the first vector as a (rather trivial) rejection to produce clean code.
Also note that the function throws a
std::string when it detects a null blade. The rest
of the example is identical to that of Section 3.11.1.
The result of the Gram-Schmidt orthogonalization implies that vectors spanning a sub-
space can be orthogonalized if they are invertible. This has consequences for the blade
representing that subspace, for using the new basis we can write it as a geometric product
of vectors b
1
b
2
···b
k
rather than as an outer product of vectors v
1
∧ v
2
∧···∧v
k
. This
is often useful in algebraic manipulation inside proofs, since the geometric product has
/**
Uses GA to perform Gram-Schmidt orthogonalization.
Throws std::string when input vectors ’vIn’ are dependent.
Results are returned in ’vOut’.
*/
void GramSchmidtGA(const e3ga::vector vIn[], e3ga::vector vOut[], int nbVectors) {
mvB=1;
for (int i = 0; i < nbVectors; i++) {
mv newB = vIn[i] ^ B;
// check for dependence of input vectors:
if (_Float(norm_r2(newB)) == 0.0f)
throw std::string("input vectors are dependent");
// compute orthogonal vector ’i’:
vOut[i] = _vector(newB * inverse(B));
B = newB;
}
}
Figure 6.6: Gram-Schmidt orthogonalization code (Example 2).
SECTION 6.7 PROGRAMMING EXAMPLES AND EXERCISES 165
richer algebraic properties; for instance, it is invertible, whereas the outer product is not.
Since orthogonal vectors anticommute, we have: an invertible blade can be written as a
geometric product of anticommuting vectors.
In non-Euclidean metrics, null vectors and null blades occur and those are noninvert-
ible. This implies we cannot use the division the orthogonalization algorithm requires.
Yet even in such a space, a blade can be written as a geometric product of anticommut-
ing vectors; we just have to compute them in a different manner. We recommend the
method described in Section 19.4 as the numerically stable way of finding these anticom-
muting vectors. The method amounts to computing the metric matrix of the blade and
computing its eigenvalue decomposition; the eigenvectors are then used to compute the
anticommuting vectors that span the blade.
7
ORTHOGONAL
TRANSFORMATIONS
AS VERSORS
Reflection in a line is represented by a sandwiching construction involving the geometr ic
product. Though that may have seemed a curiosity in the previous chapter, we will show
that it is crucial to the representation of operators in geometric algebra. Geometrically, all
orthogonal transformations can be considered as multiple reflections. Algebraically, this
leads to their representation as a geometric product of unit vectors.
An even number of reflections gives a rotation, represented as a rotor—the geometric
product of an even number of unit vectors. We show that rotors encompass and extend
complex numbers and quaternions, and present a real 3-D visualization of the quaternion
product. Rotors transcend quaternions in that they can be applied to elements of any
grade, in a space of any dimension.
The distinction between subspaces and operators fades when we realize that any sub-
space generates a reflection operator, which can act on any element. The concept of
a versor (a product of vectors to be used as an operator in a sandwiching product)
combines all these representations of orthogonal transformations. We show that versors
preserve the st ructure of geometric constructions and can be universally applied to any
geometrical element. This is a unique feature of geometric algebra, and it can simplify
code considerably.
167

168 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
The chapter ends with a discussion of the difference between geometric algebra and
Clifford algebra, and a preliminary consideration of issues in efficient implementation
to convince you of the practical usability of the versor techniques in writing efficient code
for geometry.
7.1 REFLECTIONS OF SUBSPACES
We have seen in Section 6.4 how we can construct the reflection of a vector x in a line
through the origin characterized by a vector a as
reflection of x in a-line: x → 2(x · a) a
−1
− x = axa
−1
.
The magnitude or orientation of a are irrelevant to the outcome, since the inversion
removes any scalar factor. Only the attitude of the line matters.
Since line reflection is a linear transformation on x, we should be able to extend it from
vectors to general blades X as an outermorphism. The result is
reflection of X in a-line: X → aXa
−1
.
(7.1)
This is indeed relatively straig htforward to prove by induction using X
k
= x
k
∧ X
k−1
and
assuming that it holds for X
k−1
. Then
(ax
k
a
−1
) ∧ (aX
k−1
a
−1
) =
1
2
(ax
k
a
−1
aX
k−1
a
−1
+ a
X
k−1
a
−1
ax
k
a
−1
)
=
1
2
(a (x
k
X
k−1
) a
−1
+ a (
X
k−1
x
k
) a
−1
)
= a
1
2
(x
k
X
k−1
+
X
k−1
x
k
)
a
−1
= a (x
k
∧ X
k−1
) a
−1
= aX
k
a
−1
and the induction basis is of course the trivial statement for scalars a ξ a
−1
= ξ. See struc-
tural exercise 1 for another way of not proving this. As always, we can extend the linear
transformation from blades X to general multivectors X by linearity.
By the simple trick of swapping the sign in (7.1), we can modify the line reflection formula
into a hyperplane reflection formula. For the reflection of a vector x in the plane A is equiv-
alent to swapping the sign of the rejection of x by that plane (i.e., it is x −2(x ∧ A) / A). By
inserting a pseudoscalar and its inverse and using duality, we can rewrite this as x −
2(xa) / a, with a = A
∗
the normal vector of the hyperplane. This can be rewritten as
before in terms of a geometric product, yielding
reflection of x in dual hyperplane a: x →−axa
−1
.
Note that the precise sign of the dualization of the hyperplane A to produce a is not
important, due to the absorption of any scalar factors by the subsequent inverse. Figure 7.1
compares the two kinds of reflections.