Douglas H. Williams. PDA Robotics. 2003. 256p
Подождите немного. Документ загружается.


#undef THIS_FILE
static char BASED_CODE THIS_FILE[] = __FILE__;
#endif
IMPLEMENT_DYNAMIC(CPDASocket, CSocket)
CPDASocket::CPDASocket(PURPOSE_E iPurpose):
CCeSocket(iPurpose)
{
}
void CPDASocket::OnReceive(int nErrorCode)
{
//
// Call the ReadPDAData() that exists in
// the CPDABotDlg class
//
((CPDABotDlg *)AfxGetApp())->ReadPDAData();
CSocket::OnReceive(nErrorCode);
}
CPDASocket inherits everything from CceSocket, meaning users call
and access all the public member functions and variables. The virtual
function OnReceive(int nErrorCode) is overridden so that users can
implement their own version, but still use the underlying code and
features. Note that the default socket type is set to data.
CCeSocket::CCeSocket
This constructor creates an instance of a socket object.
CCeSocket ( PURPOSE_E iPurpose = FOR_DATA);
Parameters
iPurpose specifies the enumerated constant that designates whether
the socket is to be a listening socket or a data socket. It is one of the
following values:
• FOR_LISTENING
• FOR_DATA
Remarks
When constructing a CCeSocket object, specify whether it is a listen-
ing socket or a data socket. After construction, call the Create method.
PDA Robotics
188
PDA 09 5/27/03 8:50 AM Page 188

If you do not specify the purpose of the socket, the constructor con-
structs a data socket by default.
OnWireless: Implementing the CPDASocket Class
The following code is from CPDABotDlg and gets called when the user
clicks the Wireless button. It creates the socket, identifying itself as the
name of the PDA it is running on by calling gethostname() and then
initiates the connection with the command center. If it went well, the
command center will send back the message “SUCCESS.” We then lis-
ten for other commands such as FORWARD, REVERSE, RIGHT, LEFT,
STOP, and RANGE. The PDA sends the corresponding commands to
PDA Robot via the infrared socket.
//
// OnWireless connects to the command center over the wireless network. NOTE: YOU
// MUST connect to the command center before initializing the IrDA. If you initialize the
// IrDA first this button will be disable until the application is restarted. This will be fixed
// in the next version which can be downloaded at www.pda-robotics.com
//
void CPDABotDlg::OnWireless()
{
//
// Listen on the wireless socket for commands from the
// command center and forward them to PDA Robot on the
// Infrared socket.
//
UpdateData(TRUE);
m_hostname.GetWindowText(m_strServer);
m_username.GetWindowText(m_strUsername);
m_password.GetWindowText(m_strPassword);
CheckForAuthentication();
::SetTimer(this->CWnd::m_hWnd, 1, 1000, NULL);
}
bool CPDABotDlg::CheckForAuthentication()
{
if(!StartApplication())
{
return FALSE;
}
m_bClientConnected=true;
Chapter 9 / PDA Robot Software for Pocket PC 2002
189
PDA 09 5/27/03 8:50 AM Page 189

char szHostName[25];
//
// Get the name of the PDA this is running and send it
// to the command Centre.
//
gethostname(szHostName,25);
m_pSocket->Send (szHostName,25,0);
char szUsername[255];
char szPassword[255];
strcopy(szUsername,m_strUsername);
strcopy(szPassword,m_strPassword);
//
//send the user name and the password
//
m_pSocket->Send (szUsername,255,0);
m_pSocket->Send (szPassword,255,0);
return TRUE;
}
//
// ConnectSocket Creates the CPDASocket which is derived from a CCeSocket
// and attempte to connect to the remote host that the control center is
// running on.
//
BOOL CPDABotDlg::ConnectSocket(LPCTSTR lpszHandle, LPCTSTR lpszAddress, UINT
nPort)
{
m_pSocket = new CPDASocket(CCeSocket::FOR_DATA);
if (!m_pSocket->Create())
{
delete m_pSocket;
m_pSocket = NULL;
this->m_status_window.SetWindowText( (LPCTSTR) CString("Can't create sock") );
return FALSE;
}
if(!m_pSocket->Connect(lpszAddress, nPort + 700))
{
this->m_status_window.SetWindowText( (LPCTSTR) CString("Failed to connect") );
delete m_pSocket;
m_pSocket = NULL;
return FALSE;
PDA Robotics
190
PDA 09 5/27/03 8:50 AM Page 190

}
return TRUE;
}
//
// Star tApplication sets the connection parameters and
// calls ConnectSocket. If the connection fails ensure
// that the Control Center (which acts as the Server )
// is running.
//
BOOL CPDABotDlg::Star tApplication()
{
m_strHandle="7";
m_hostname.GetWindowText(m_strServer);
m_nChannel=7;
if (ConnectSocket(m_strHandle, m_strServer, m_nChannel))
return TRUE;
else
{
this->m_status_window.SetWindowText( (LPCTSTR) CString("Connection Failed ") );
return FALSE;
}
}
//
// ReadPDAData() Is called when the CESocket signals that
// data has arrived from the Command Center. The data is
// a string indicating that the connection was successful
// or a Motion command that will be relayed to PDA Robots
// body.
//
void CPDABotDlg::ReadPDAData()
{
CString status_message;
char szMessage[512];
static int initialized;
u_long numbytes;
int ret;
//
// Ensure that we won't be blocked waiting here on the call
// to read the data.
//
ret = ioctlsocket ((SOCKET) m_pSocket, FIONREAD, &numbytes);
if( (ret == 0) && (numbytes > 0) )
Chapter 9 / PDA Robot Software for Pocket PC 2002
191
PDA 09 5/27/03 8:50 AM Page 191

{
//
// Receive the data from Command Center
//
ret = recv ( (SOCKET) m_pSocket, &szMessage[0], numbytes, 0);
}
else{
return;
}
//
// Set the status to the last command so it can be displayed
// in the status edit box named m_status_window and used in the
// OnTimer() function to relay the commands to PDA Robot
//
LastStatus = szMessage;
//
// Note: The Timer was started when the Wireless link was
// Enabled and the data received is interpreted when the timer
// goes off.
//
}
void CPDABotDlg::OnTimer(UINT nIDEvent)
{
m_status_window.SetWindowText( (LPCTSTR) LastStatus);
if(LastStatus == "SUCCESS" )
{
//
// We have connected to the Command Center
//
m_status_window.SetWindowText( (LPCTSTR) CString("Connect Infrared") );
}else if(LastStatus == "FORWARD"){
//
// Instruct PDA Robot to move Forward via the IR Socket if
// an IrDA link has been established
//
if( m_bIrDAConnected )
{
send( Infrared_Socket, (const char *) "be", 2, MSG_DONTROUTE);
PDA Robotics
192
PDA 09 5/27/03 8:50 AM Page 192

}
}else if(LastStatus == "REVERSE" ){
//
// Instruct PDA Robot to move Reverse via the IR Socket if
// an IrDA link has been established
//
if( m_bIrDAConnected )
{
send( Infrared_Socket, (const char *) "ad", 2, MSG_DONTROUTE);
}
}else if(LastStatus == "LEFT" ){
//
// Instruct PDA Robot to move Left via the IR Socket if
// an IrDA link has been established
//
if( m_bIrDAConnected )
{
send( Infrared_Socket, (const char *) "ae", 2, MSG_DONTROUTE);
}
}else if(LastStatus == "RIGHT" ){
//
// Instruct PDA Robot to move Left via the IR Socket if
// an IrDA link has been established
//
if( m_bIrDAConnected )
{
send( Infrared_Socket, (const char *) "bd", 2, MSG_DONTROUTE);
}
}else if(LastStatus == "STOP" ){
//
// Instruct PDA Robot to Stop via the IR Socket if
// an IrDA link has been established
//
if( m_bIrDAConnected )
{
send( Infrared_Socket, (const char *) "cf", 2, MSG_DONTROUTE);
}
}else{
//
Chapter 9 / PDA Robot Software for Pocket PC 2002
193
PDA 09 5/27/03 8:50 AM Page 193
// couldn't log on or we received some bad data
//
}
CDialog::OnTimer(nIDEvent);
}
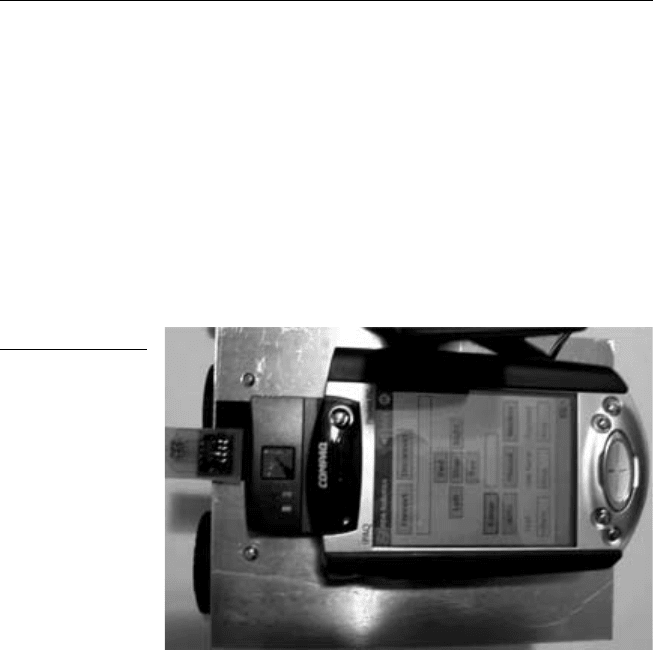
Once the wireless connection to the command center (PC) and the
infrared connection has been established, we can now control the PDA
Robot remotely, seeing through the wireless camera (see Figure 9.7).
PDA Robotics
194
Figure 9.7
PDA with wireless
card.
PDA 09 5/27/03 8:50 AM Page 194
195
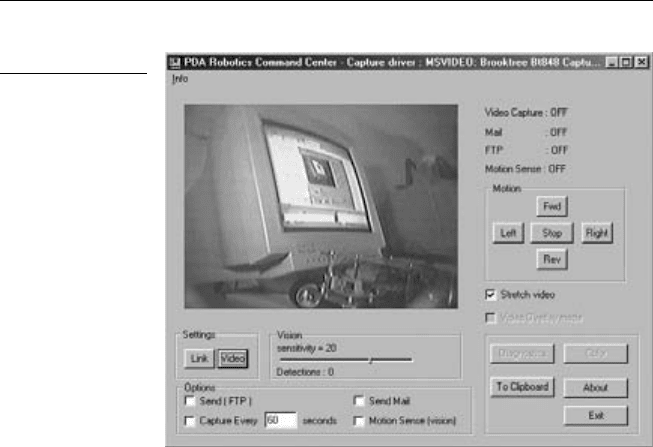
The command center runs on a Windows 95 or better operating system
PC that is connected to the wireless network through a Network
Everywhere Cable/DSL Router. It has a Video Capture Card connected
to an X10 wireless video receiver.
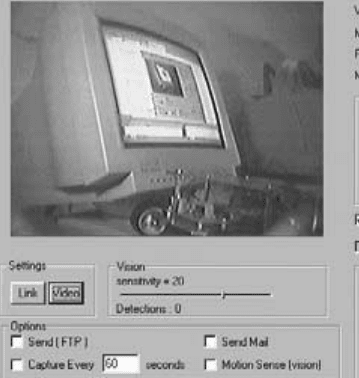
From the command center, users can control PDA Robot remotely. It
can detect motion, as well as save and send images via file transfer
protocol (FTP) or simple mail transfer protocol (SMTP). When the
application starts, it listens for a connection from the PDA that is con-
trolling PDA Robot. When PDA Robot successfully logs in, users can
begin controlling the craft remotely, looking through its eyes. Figure
10.1 shows the main screen of the command center.
The Video Link
The following program is using the Video for Windows application
programming interface (API) provided by Microsoft. A window is cre-
ated in the dialog, with the Dialog window being the parent, and it is
registered as the video window.
void CBeamDlg::OnInitializeDriver()
{
//
// Display the video source window that allows the user to select the input
10
The PDA
Robotics
Command Center
PDA 10 5/27/03 8:51 AM Page 195
Copyright 2003 by The McGraw-Hill Companies, Inc. Click Here for Terms of Use.
//
BOOL code = capDlgVideoSource(h_capwin);
//
// Create the Capture window
//
h_capwin = ::capCreateCaptureWindow("PDABot Video",
WS_CHILD|WS_CLIPSIBLINGS|WS_VISIBLE|WS_EX_DLGMODALFRAME ,
20,
20
,320,
240,this->m_hWnd,0
);
//
// Hook into the video driver. Check up to 10 and use the first one encountered
//
for( int j=0; j<10;j++){
code = capDriverConnect(h_capwin, j);
if(code){
// Select the video source
code = capDlgVideoSource(h_capwin);
// Set the preview rate
code = capPreviewRate(h_capwin, 100);
// turn video previewing on
code = capPreview(h_capwin, TRUE );
break;
PDA Robotics
196
Figure 10.1
Command center.
PDA 10 5/27/03 8:51 AM Page 196

}else{
//
// No Driver Detected
}
}
m_stretch_video.SetCheck(1);
//
// Add the name of the video driver to the title bar of the window
//
code = capDriverGetName( h_capwin, &szName[0], wSize );
if( code == TRUE )
{
title_text += " - Capture driver : ";
title_text += szName;
this->SetWindowText(title_text);
}
}
The video should now be displayed on the main window, as shown in
Figure 10.1. If the user has selected motion detection, stream the video
into a callback function, checking to see if anything has changed
between the first image that was stored in memory and the current
frame.
Motion Detection
void CBeamDlg::OnCheckVision()
{
if( m_check_vision.GetCheck() == 1)
{
m_radar_stat.SetWindowText("Motion Sense : ON");
//
// Disable stretch feature... the stretch requires significant processor cycles
//
if( m_stretch_video.GetCheck() == 1 )
{
m_stretch_video.SetCheck(0);
capPreviewScale(h_capwin, FALSE);
m_stretch_video.EnableWindow(FALSE);
this->InvalidateRect(NULL, TRUE);
}
Chapter 10 / The PDA Robotics Command Center
197
PDA 10 5/27/03 8:51 AM Page 197