Фалк Г.Б., Иванько А.Ф. САПР средств и систем управления
Подождите немного. Документ загружается.


11
наверняка не обеспечивают требуемых динамических показателей системы и
необходимую перегрузочную способность.
2.2.2 Оценка диапазона номинальной частоты вращения вала n
ном
(об/мин)
выбираемого двигателя может быть сделана исходя из максимально допустимого
передаточного отношения редуктора и заданного диапазона угловых скоростей
исполнительной оси:
ni
ном нг ед
≤⋅⋅
ω
π
.max р .max
30
. (2.2)
2.3 Предварительный выбор двигателя с использованием
автоматизированной системы, реализованной на ПЭВМ
Автоматизированная система выбора двигателей представляет собой систему
управления базой данных (СУБД), написанную на языке управления данными dBASE и
отлаженную с помощью транслятора Clipper.
2.3.1 Предварительный выбор заключается в определении ограниченного
множества двигателей, принадлежащих к выбранным сериям, удовлетворяющих
требованиям (2.1) и (2.2) и
имеющих номинальное напряжение питания,
соответствующее Т3.
2.3.2 Предварительный выбор двигателей осуществляется студентом-
разработчиком в режиме диалога с ПЭВМ. При этом студент вводит в ПЭВМ данные,
указанные в п.2.2 и ему выдается список двигателей, удовлетворяющих требованиям
п.2.2.
2.3.3 Для предварительного выбранных двигателей студент должен распечатать
или записать технические данные. В таблицу данных ИАД
входят:
- тип двигателя;
- номинальная мощность;
- максимальная мощность управления;
- номинальное напряжение возбуждения;
- номинальное напряжение управления;
- пусковой ток возбуждения;
- пусковой ток управления;
- частота напряжения питания;

12
- пусковой момент;
- номинальный момент;
- частота вращения ротора при х.х.;
- напряжение трогания;
- момент инерции ротора двигателя;
- электромеханическая постоянная времени;
- масса двигателя;
- К.П.Д.;
- габаритные размеры;
- диаметр вала двигателя.
Если для какого-либо из двигателей в данных отсутствует значение номинальной
частоты вращения n
ном
, определить n
ном
через Р
ном
и М
ном
.
2.4 Окончательный выбор двигателя
Окончательный выбор двигателя осуществляется исходя из заданных показателей
качества следящей системы, т.е. для динамического режима:
ε
нг.max
,
ω
нг.max
.
В качестве критерия выбора обычно принимают следующий: двигатель
удовлетворяет требованиям Т3, если его пусковой момент больше или равен максимально
возможному моменту сопротивления на валу двигателя М
max
в динамическом режиме:
(1,2
÷
1,25) М
max
≤
M
п
, где (2.3)
(1.2 ÷1.25) — коэффициент запаса по пусковому моменту.
При этом выбор двигателя заключается в последовательном усечении множества
двигателей, предварительно выбранных в п. 2.3.
2.4.1. Для каждого из двигателей, выбранных в п. 2.3, определить передаточное
отношение редуктора i
ред
, обеспечивающее заданную угловую скорость исполнительной
оси:
i
n
ед
ном
нг
р .
.max
.=⋅
π
ω
30
(2.4)
2.4.2. Для каждого из редукторов рассчитать момент инерции, приведенный к валу
двигателя.
Примечание.Если двигателей несколько,то полный расчет момента инерции редуктора
можно производить только для одного из них – с наименьшим
i
ред
.На этом примере

13
определить,сколько первых ступеней дают порядка 95% от суммарного приведенного
момента инерции редуктора.При расчете момента инерции остальных редукторов
достаточно учитывать только это количество ступеней.
2.4.2.1. Задаться рекомендуемыми размерами и параметрами редукторов. Число
ступеней редуктора
m рекомендуется выбирать от 2 до 4 с таким расчетом, чтобы
передаточное отношение ступени не превышало 10.
Передаточные отношения ступеней ориентировочно принимаем равным
.
ред
т
ст
ii =
Число зубьев z
ш
рекомендуется принять равным 18−24. Тогда число зубьев на
колёсах ступеней
z
kj
=z
ш
⋅i
ст
, гдеj=1…m.
Округляем число зубьев
z
kj
колес всех ступеней, за исключением последней, до
ближайших целых чисел. В последней ступени округление производится таким образом,
чтобы произведение передаточных отношений ступеней наименее отличалось от
заданного
i
ред
. Уточнение передаточных отношений ступеней осуществляется по формуле
i
z
z
ст j
kj
ш
.
= , где j=1…m.
Расчетный модуль зубьев определяется из соотношения:
где диаметр шестерни первой ступени
d
ш1
(мм) выбирается в зависимости от диаметра
вала двигателя
d
в.дв
(мм)
d
ш1
≈ 2.5 d
в.дв
.
По СТ СЭВ 310
−76 принимаем на всех ступенях нормальный модуль m
z
зацепления,
ближайший наибольший к
m
расч
(табл 2.1).
Таблица 2.1.
0.1 0.15 0.2 0.3 0.4 0.5 0.6 0.8 1 1.25 1.5 2 2.5 3 4
ш
ш
расч
z
d
т
1
=
14
В зависимости от значения модуля рекомендуется выбирать ширину шестерни
примерно равной 10
m
z
, колёс ⎯ 5 m
z
, диаметр валов d
в
≈ 10 m
z
, длину валов ⎯ 10d
в
.
15
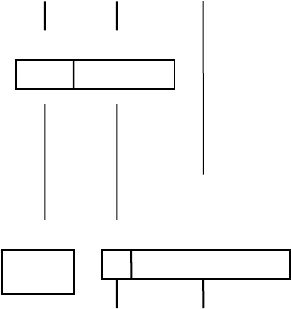
2.4.2.2. Составить кинематическую схему редуктора с числом ступеней m. Пример
кинематической схемы двухступенчатого редуктора показан на рис. 2.1.
Нагр.
z
ш1
z
к1
z
ш2
z
к2
Рис. 2.1.
2.4.2.3. Приняв, что зубчатые шестерни, колеса и валы представляют собой
стальные цилиндры соответствующих размеров, рассчитать момент инерции редуктора
J
ред
, приведенный к валу двигателя.
2.4.3. Для каждой из выбранных пар двигатель
⎯ редуктор рассчитать
максимально возможный момент сопротивления в динамическом режиме
M
max
и
проверить условие (2.3). Момент
M
max
определяется статическими моментами
сопротивления нагрузки и редуктора и моментами инерции всех подвижных частей
привода:
M
max
= M
′
нг
+( J
дв
+ J
′
ред
+( J
′
нг
/η
ред
))⋅ε
нг.max
⋅ i
ред
, (2.5)
где
M
′
нг
⎯ статический момент сопротивления нагрузки, приведенный к валу
двигателя;
J
′
ред
, J
′
нг
⎯ моменты инерции редуктора и нагрузки, приведенные к валу
двигателя;
η
ред
⎯ к.п.д. редуктора (ориентировочно 0.8÷0.9).
Проверить условие (2.3), если оно выполняется, то двигатель отвечает требованиям ТЗ.
Предпочтение следует отдать двигателю меньшей мощности.
х х
Двиг.
х х

16
2.5 Построение механической характеристики выбранного двигателя при
номинальном напряжении управления
2.5.1. Реальные механические характеристики исполнительных асинхронных
микродвигателей являются нелинейными и их жесткость зависит от коэффициента
сигнала
α (α=U
у
/U
у.ном
), где U
у
и U
у.ном
⎯ текущее и номинальное значения напряжения
управления. В первом приближении механические характеристики определяются
уравнением
ММ
дв n.
(( ) ()
)
=⋅−−⋅−⋅
α
αα
μ
ω
ω
μ
ω
ω
114 4
2
0
2
0
2
, (2.6)
где
M
дв
⎯ вращающий момент на валу двигателя;
M
п
α
⎯ пусковой момент при данном сигнале;
ω
0
α
⎯ угловая скорость холостого хода при данном сигнале;
ω
2
⎯ угловая скорость ротора;
μ
⎯ нелинейность механической характеристики.
2.5.2. Для выбранного двигателя из уравнения (2.5) определить расчетное значение
нелинейности
μ
, при которой механическая характеристика будет проходить через
заданные в каталоге точки холостого хода, пускового момента, номинальной нагрузки при
номинальном напряжении управления (
ω
0
α
, M
п
α
, α).
2.5.3. При рассчитанном значении
μ
рассчитать и построить механическую
характеристику выбранного двигателя при номинальном напряжении управления (число
расчетных точек 5
−7 в диапазоне от 0 до n
0
, где n
0
⎯ частота вращения двигателя при
холостом ходе).
17
2.6. Определение параметров передаточной функции выбранного
двигателя
2.6.1. Механические и регулировочные характеристики исполнительных
асинхронных микродвигателей нелинейные и передаточные функции в общем случае
весьма сложные. Однако, при линеаризации характеристик и пренебрежении
электромагнитными переходными процессами передаточные функции упрощаются и
имеют вид
Wp
p
Up
K
p
у
дв
м
()
()
()
==
+
ω
τ
2
1
, (2.7)
Wp
p
Up
K
pp
у
дв
м
()
()
() ( )
.
==
+
θ
τ
2
1
, (2.8)
где
p ⎯ оператор Лапласа;
θ
2
⎯ угол поворота ротора.
Коэффициент передачи двигателя
K
d
dU
дв
у
.
=
ω
2
, (2.9)
электромеханическая постоянная времени
τ
м
дв
дем
J
K
=
.
.
, (2.10)
где коэффициент внутреннего демпфирования
K
dM
d
дем
дв
=
.
ω
2
. (2.11)
2.6.2. При линеаризации механических и регулировочных характеристик
коэффициент передачи двигателя может быть определен как отношение:
K
K
K
дв
n
дем
.
.
= . (2.12)
Коэффициент пропорциональности между пусковым моментом и напряжением
управления
K
dM
dU
n
n
у
=
α
(2.13)
18
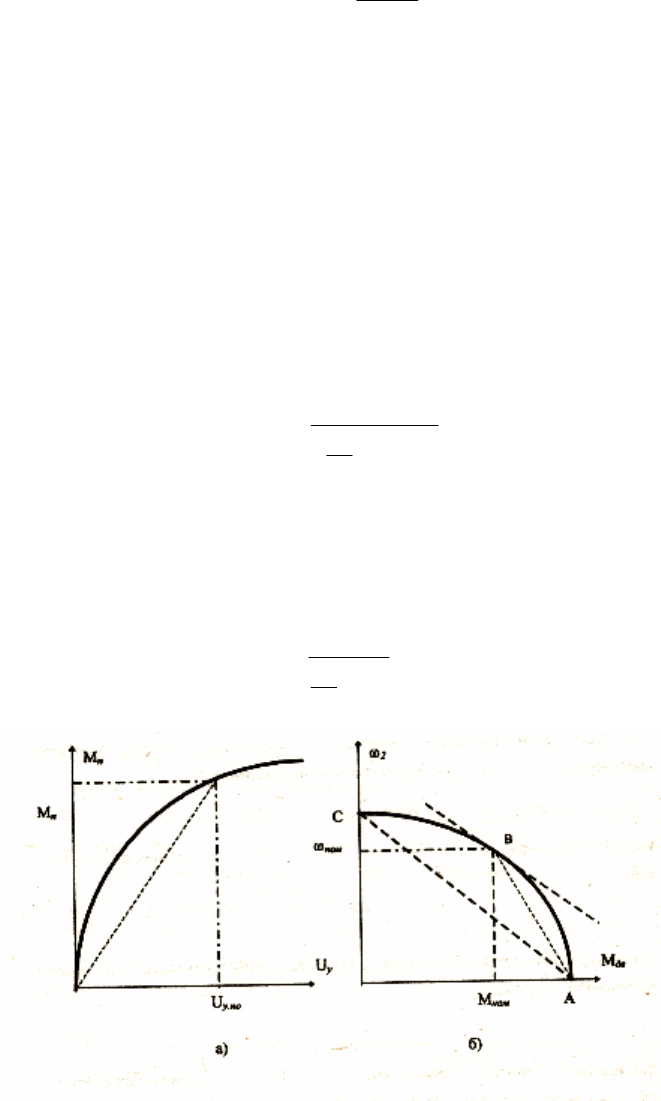
при линеаризации зависимости M
п
α
= f (U
у
) (рис. 2.2.а, пунктирная линия) определяется по
каталожным данным
K
M
U
n
n
уном
=
.
.
(2.14)
Линеаризацию механической характеристики можно осуществить различными способами
(рис. 2.2.б, пунктирная линия). Наиболее часто используются следующие три способа.
Если установившийся режим работы
⎯ вращение двигателя с угловой скоростью
близкой к номинальной, то линеаризацию целесообразно провести посредством
касательной к точке B. При этом
K
дем
может быть определен по графически заданной
механической характеристике.
Если угловая скорость изменяется в диапазоне от нуля до номинальной, то
линеаризацию целесообразно проводить посредством секущей AB. При этом
K
MM
n
дем
n ном
ном
.
.
=
−
⋅
π
30
. (2.15)
Если угловая скорость изменяется во всем диапазоне от нуля до скорости
холостого хода, то линеаризацию можно провести посредством секущей AC. Это
наиболее грубый способ линеаризации, при нем
K
M
n
дем
n
.
=
⋅
π
30
0
.
19
Рис.2.2
2.6.3. Рассчитать для выбранного значения двигателя значения K
дв
и
τ
м
при трех
указанных в п. 2.6.2. способах линеаризации механической характеристики. При расчете
использовать каталожные данные и расчетную механическую характеристику (п. 2.5.).
3. ВЫБОР ШАГОВОГО ДВИГАТЕЛЯ (ШД) ДЛЯ ДИСКРЕТНОГО
ЭЛЕКТРОПРИВОДА
3.1 Особенности работы ШД предъявляют весьма жесткие требования к
согласованию параметров выбираемого двигателя с заданной нагрузкой. Это особенно
актуально в разомкнутых системах дискретного привода, когда пропуск двигателем хотя
бы одного управляющего импульса приводит к ошибке преобразования электрического
сигнала управления в угол, которую система исправить не в состоянии.
Проверку на нагрев
шаговых двигателей обычно не производят, так как они
расчитаны на длительный режим прохождения импульсов тока по обмоткам управления.
3.2. Предварительный выбор ШД с использованием автоматизированной системы,
реализованной на ПЭВМ.
3.2.1. Предварительный выбор заключается в определении ограниченного
множества двигателей, принадлежащих к выбранным сериям и удовлетворяющих
требованиям ТЗ по напряжению питания, приемистости, моменту нагрузки
и угловой
скорости.
3.2.2. Предварительный выбор ШД осуществляется студентом-разработчиком в
режиме диалога с ПЭВМ. При этом студент вводит в ПЭВМ данные, указанные в п.3.2.1.,
и ему выдается список двигателей, удовлетворяющих требованиям п. 3.2.1.
3.2.3. Для предварительно выбранных ШД студент должен распечатать или
записать технические данные. В таблицу данных ШД входят:
- тип
двигателя;
- шаг α
ш
;
- число обмоток управления;
- максимальный синхронизирующий момент;
- номинальный момент нагрузки;
- момент инерции ротора двигателя;
- номинальный момент инерции нагрузки;
20
- приемистость двигателя при холостом ходе;
- приемистость двигателя при номинальной нагрузке f
ш.дв
;
- потребляемая мощность;
- габаритные размеры;
- масса;
- диаметр вала двигателя;
- напряжение управления.
3.3. Выбор передаточного отношения редуктора и расчет приведенных моментов
сопротивления и инерции нагрузки.
3.3.1. Для каждого из выбранных двигателей определить передаточное отношение
редуктора i
ред
, обеспечивающее заданную максимальную угловую скорость
исполнительной оси при номинальной частоте приемистости
i
f
ед
шшдв
нг
р .
..
.max
=⋅
⋅
π
α
ω
180
. (3.1)
Проверить, обеспечит ли это передаточное отношение заданную статическую точность
отработки угла поворота исполнительной оси
Δθ
нг
, то есть выполняется ли условие
i
ед
ш
нг
р .
.
≥
α
θ
Δ
. (3.2.)
Если условие 3.2. выполняется, то двигатель оставляется для последующих этапов
выбора.