Graziani F. (editor) Computational Methods in Transport
Подождите немного. Документ загружается.

Parallel Solution of the Time-Dependent S
N
Equations 471
1
c∆t
I
n+1
+ Ω ·∇I
n+1
+ κ
t
(ε)I
n+1
−
dΩ
dε
I
n+1
κ
s
(Ω
,ε
,Ω,ε)
=
1
c
S(ε)+
I
n
∆t
(2)
where we have suppressed the arguments of I in the integral term for clarity
and where we use standard finite-difference notation of superscripts to denote
the time at which the time-discretized analog of I is defined:
I
n
≡ I(x,Ω,ε,t
n
) . (3)
We now consider the angular discretization of (2). For the sake of brevity
we restrict ourselves to 1-D geometries such as Cartesian or spherical coor-
dinates where the direction can be characterized by a single angle cosine µ
and (2) simplifies to
1
c∆t
I
n+1
+ µ ·∇I
n+1
+ κ
t
(ε)I
n+1
− 2π
dµ
dε
I
n+1
κ
s
(µ
,ε
,µ,ε)
=
1
c
S(ε)+
I
n
∆t
. (4)
Angular discretization in multi-dimensions is straightforward and the reader
is referred to [LM93] for details. In the discrete ordinates method the con-
tinuous range of the angular cosine, −1 ≤ µ ≤ 1, is replaced by a discrete
set of angular ordinates {µ
k
| k =1,...,N} for which (4) holds true. For
the direction µ
k
the angular integral in (4) is approximated by a compatible
quadrature
dµ
I
n+1
κ
s
(µ
,ε
,µ,ε) ≈
N
=1
w
I
n+1
κ
s
k,
(ε
,ε)(5)
where k and are subscripts denoting directions µ
k
and µ
. The energy
integral can be dealt with similarly by discretizing the spectrum into a series
of groups with energies at the group center given by {ε
g
| g =1,...,M}
and the group widths given by {∆ε
g
| g =1,...,M}. For an energy ε
h
and
direction µ
k
the double integral in (4) is approximated by
dµ
dε
I
n+1
κ
s
(µ
,ε
,µ,ε) ≈
N
=1
M
g=1
∆ε
g
w
I
n+1
κ
s
k,h,,g
(6)
and the discrete analog of (4) becomes
1
c∆t
I
n+1
h,k
+ µ
k
·∇I
n+1
h,k
+ κ
t
h
I
n+1
h,k
− 2π
N
=1
M
g=1
∆ε
g
w
I
n+1
κ
s
k,h,,g
=
1
c
S
h
+
I
n
h,k
∆t
. (7)
472 F.D. Swesty
Equation (7) is referred to as the S
N
equation or the monochromatic, discrete-
ordinates, Boltzmann equation.
In order to numerically solve (7) some form of spatial discretization is
applied to the streaming operator µ
k
·∇. This discretization may require some
sort of closure relationship relating the intensities at adjacent spatial points.
For a detailed description of a variety of spatial discretizations we refer the
reader to [PA92]. For any spatial discretization scheme that is linear in I
n+1
h,k
the set of equations (7) for all spatial zones, together with any linear equations
describing boundary conditions on the computational domain, forms a large,
sparse, linear system of equations that must be solved in order to obtain I
n+1
h,k
at each timestep.
3 Iterative Approaches
The linear systems described in Sect. 2 are sparse and, for multidimensional
problems, extremely large. The sparsity suggests the use of iterative methods
to solve the linear system. Direct solution methods for these linear systems
have been applied in one dimensional problems, e.g. [MB93], but in multi-
dimensional problems the size of the linear systems renders direct solution
methods impractical in most situations.
The iterative methods utilized have fallen into two categories. The first are
source iteration methods, which split the linear systems into parts, solving
a portion of the system directly. This method has been widely utilized by
the neutronics community for many years [LM93]. The second approach has
been the use of Krylov subspace algorithms applied to the full linear system.
This method has seen only limited use in both the astrophysical community
[DM05] and the neutronics community [PH02].
3.1 Source Iteration
In this section we will briefly describe the source iteration method in a linear
algebraic context. An alternative, and perhaps more physical, description is
provided in [LM93]. The linear system arising from the S
N
equations can be
written in the form of
Ax = b (8)
where x is a vector containing the unknowns I
n+1
h,k
and b is a vector made up
of the right-hand-sides of (7). The full linear system matrix A can be split
into parts arising from the various operators composing the left-hand-side of
(7)
A = D + T + S. (9)
In (9) D is a matrix arising from the time derivative and total opacity terms
on the left-hand-side of (7) and S is matrix arising from the scattering term.
The matrix T arises from the spatial discretization of the streaming operator.
Parallel Solution of the Time-Dependent S
N
Equations 473
In a 1-D problem, with a lexicographic ordering of variables, these matrices
may take on a very simple form where D may be diagonal or banded, T may
be tridiagonal, and S could consist of blocks of size NM × NM located on,
or adjacent to, the diagonal. In the general case D, T ,andS may be more
complex in structure.
The strategy behind the source iteration scheme is to exploit the splitting
to form an iterative scheme as follows:
1. An initial guess is made for the solution vector x
2. The equation
(D + T )x
= b − Sx (10)
is solved for x
using direct methods applied to the matrix D + T which
is usually banded for simple geometries and meshes.
3. set x = x
and repeat the procedure starting at step 1 until convergence
is obtained.
This simplistic iterative algorithm suffers from two major limitations that
run counter to the desiderata listed in Sect. 2.
The first problem arises from the direct solve in step 2 of the source itera-
tion algorithm. This solve usually exploits the banded structure arising from
simple linear discretizations of the T operator by performing Gaussian elim-
ination via forward and back substitution steps. A physical interpretation
of this process is that one is sweeping in through the mesh in the direction
of radiation travel updating the intensity in the downwind direction. How-
ever, this approach is recursive and is not well suited to parallelization. In
simple Cartesian geometries with sufficiently simple boundary conditions one
can exploit wave-front parallelization techniques [KBA92] to implement this
method on parallel architectures. However, complex boundary conditions and
curvilinear geometries couple equations with differing values of the angular
cosines in a manner that makes such parallelization techniques difficult.
The second problem with source iteration is that the method converges
poorly, or often fails to converge entirely, when the problems are scattering
dominated. The reason for this is obvious from (10) where the dominant
operator S is continually applied to the previous iterate on the right-hand-
side. This problem is not insurmountable in many cases and the convergence
can be hastened or obtained via the use of accelerators which provide better
initial guesses for step 1 of the source iteration algorithm.
There are two major benefits to this algorithm in some circumstances.
First, in optically thin situations where there is little or no scattering the
solution of (10) provides a highly accurate in answer in very few iterations.
The second benefit is that the algorithm requires little in the way of storage
especially if the scattering matrix can be applied in operator form or if it is
trivial as in the case of isotropic scattering.
474 F.D. Swesty
3.2 Full Linear System Solution via Krylov Subspace Iteration
An alternative approach to solving the linear systems arising from the S
N
equations is applying state-of-the-art Krylov subspace algorithms to obtain
the solution of the full linear system (8). The derivations of, and a description
of the features and limitations of various Krylov subspace algorithms are be-
yond the scope of this paper and the interested reader should consult [SA03]
or [BA94] for details. However, we will briefly describe aspects of the algo-
rithms that are relevant to their use in solving the linear systems arising from
the S
N
equations.
There are several advantages to using nonstationary Krylov subspace al-
gorithms for nonsymmetric problems such as GMRES [SS86] or Bi-CGSTAB
[VO92] on the full linear system Ax = b:
• Algorithms can be implemented in operator, or matrix-free, form where
storage of the coefficient matrix A is not required. The matrix-vector
multiply operation required by these algorithms can be implemented by
supplying a subprogram that evaluates the left-hand-side of the S
N
equa-
tion.
• Curvilinear coordinate systems or complex boundary conditions are rela-
tively easy to accommodate.
• Parallelism derives from the parallel nature of the sparse linear algebraic
operations involved in the Krylov subspace algorithm.
• Algorithms require only a few basic linear algebraic operations which
can usually be encoded using BLAS (Basic Linear Algebra Subprograms)
operations or their equivalents. Some of these operations such as vector
additions are embarrassingly parallel. Under a spatial domain decompo-
sition scheme the matrix-vector multiplies require only nearest-neighbor
communication within a process topology. Vector inner products can be
accomplished via global reduction operations supplied by the message
passing interface (MPI).
There are also drawbacks associated with the use of nonstationary Krylov
subspace algorithms. These algorithms require the use of temporary vectors
to hold intermediate results. Each of these vectors are identical in size to
the vector of unknowns x. Typically this means that the algorithms may re-
quire, at a minimum, 5–8 vectors worth of memory in addition to the memory
associated with the vector of unknowns. Some algorithms such as GMRES
require a number of vectors that grows as the iteration process progresses.
This growth in memory utilization can be mitigated in some cases by restart-
ing the iteration process anew (see [BA94] for details). For this reason we
restrict ourselves to discussing the Bi-CGSTAB algorithm for the remainder
of this paper.
Another drawback that nonstationary Krylov subspace algorithms share
with the source iteration process is that of non-convergence or slow
Parallel Solution of the Time-Dependent S
N
Equations 475
convergence in some circumstances. We briefly examine these issues in the
next section.
4 Speeding Up and Obtaining Convergence
There are techniques to improve the iterative convergence of both the source
iteration method and the full linear system solution method. Since our focus
for the remainder of this paper is on the use of the full linear system solution
method we will only briefly discuss techniques for improving the convergence
of source iteration. In the case of the full linear system solution we will
discuss one class of preconditioners that holds promise for use on parallel
architectures.
4.1 Accelerators
In the context of the source iteration approach improvements to iterative con-
vergence are usually sought by means of accelerators which provide a better
estimate for the vector of unknowns x for insertion into the right-hand-side
of (10) on each iterative step. The calculation of this estimate is achieved
via some algorithm that is usually referred to as an accelerator. There is
an entire body of literature on the development of accelerators. Readers are
urged to consult the excellent review article [AL02] for details. We confine
ourselves here to a brief discussion of one broadly utilized class of accelera-
tors referred to as diffusion synthetic acceleration (DSA) techniques [AL77].
In these methods a discretized diffusion equation that is consistent with the
S
N
equation is solved for the energy density which is then used to evaluate
the scattering term on the right-hand-side of (10). This process accelerates
the convergence of source iteration in optically thick or optically translu-
cent situations. DSA schemes are usually derived for the case of isotropic
scattering but the can be extended to the anisotropic case as well [MO82].
Another challenge to the construction of effective accelerators is that it is
often difficult to construct a discretized diffusion equation that is consistent
with the S
N
equation. Larsen [LA82] has developed a four-step process for
constructing DSA accelerators but the construction can be complex for many
schemes [PA92].
4.2 Preconditioners
The convergence of the full linear system solution can be improved through
the use of preconditioners. The idea behind preconditioning is deceptively
simple. A dominant factor in the convergence of a nonstationary Krylov sub-
space algorithm is the condition number of the coefficient matrix A. Precon-
ditioning seeks to improve the conditioning of the system by solving
476 F.D. Swesty
M
L
AM
−1
R
M
R
x = M
L
b (11)
instead of solving (8). The matrices M
L
and M
R
are referred to as left and
right preconditioners respectively. A clever choice of preconditioners may
provide a coefficient matrix M
L
AM
−1
R
that has a better condition number
than does A.
As with accelerators there exists a vast body of literature on precon-
ditioners which is well beyond the scope of this paper. A recent review
by Benzi [BE02] provides a fairly comprehensive bibliography for this sub-
ject. The desire for parallel scalability restricts the choice of precondition-
ers to those that are parallelizable. Many traditional preconditioning tech-
niques that are used with Krylov subspace methods are inherently sequential.
Nevertheless these preconditioning techniques can at times be utilized suc-
cessfully in a parallel context [DM05].
Development of inherently parallel preconditioners is on ongoing area of
research. For this reason we will only briefly mention one particular class
of preconditioners, sparse parallel approximate inverses (SPAI) which have
desirable scalability properties. SPAI preconditioners have been utilized suc-
cessfully on a variety of problems including radiation transport in the flux-
limited diffusion approximation [SS04]. The idea behind SPAI preconditioners
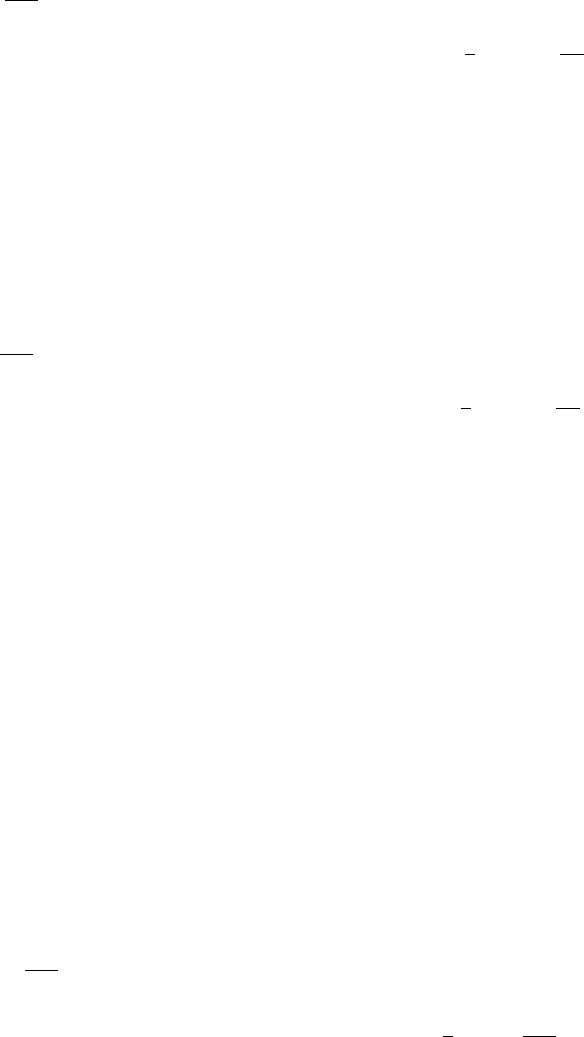
is quite simple. One wishes to exploit the sparsity pattern and the structure
of the coefficient matrix to find an effective approximation to the inverse that
is sparse. The sparsity pattern of an example system arising from the dia-
mond difference spatial closure is shown in Fig. 1 which depicts an 80 × 80
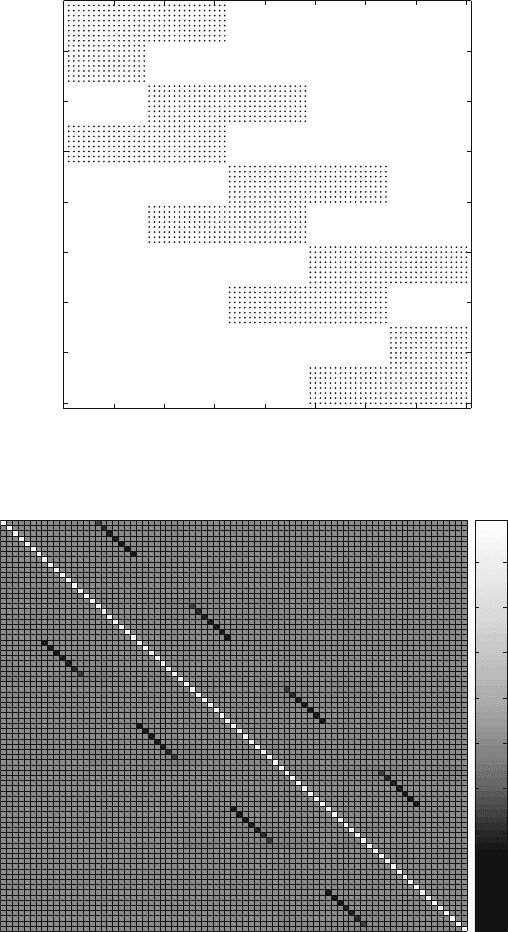
section of the upper left corner of the coefficient matrix A. The values of the
elements in this matrix section are shown as a grayscale map in Fig. 2. The
coefficient matrix A has been row scaled so that the diagonal elements have
a value of unity. Figure 2 clearly shows that dominant off-diagonal elements
lie in bands spaced a distance equal to the number of ordinates (N =16in
this case) away from the diagonal.
A pattern is chosen for the non-zero elements in the approximate inverse.
The choice of pattern may or may not be influenced by the values of the
elements in the true inverse A
−1
. Ideally we would like to find a left or right
approximate inverse by choosing values for the non-zero elements such that
M
L
≈ A
−1
or M
−1
R
≈ A
−1
. The values of the non-zero elements are in
general over-determined but we can find an optimal set of values by doing a
least squares fit to determine the values of the non-zero elements in each row
of M
L
or column of M
−1
R
. For details of this procedure consult [BE02] and
references therein. The inverse A
−1
may have structure that can be exploited
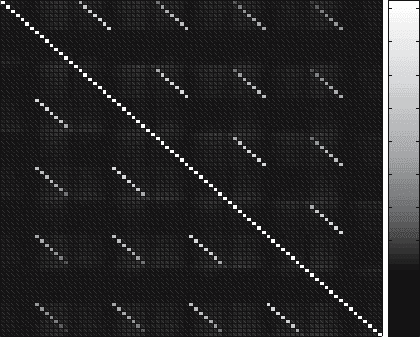
in forming the sparse approximate inverse. An example of this is illustrated in
Fig. 3 where the grayscale image shows the value of each element of the upper-
left 80×80 corner of the inverse of the matrix shown in Fig. 2. One can clearly
see that the dominant elements of the inverse lie along the diagonal and in
bands that are spaced a distance equal to integer multiples of the number of
angular ordinates away from the diagonal. This inverse structure is typical for
Parallel Solution of the Time-Dependent S
N
Equations 477
0 10 20 30 40 50 60 70 80
0
10
20
30
40
50
60
70
80
Fig. 1. A diagram of the sparsity pattern of the coefficient matrix A arising from
the diamond differenced S
N
equations for N =16
70
60
50
40
30
20
10
0
706050403020100
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Fig. 2. A grayscale map of the elements in the upper left 80 × 80 corner of the
coefficient matrix A arising from the diamond differenced S
N
equations for N =16
478 F.D. Swesty
706050403020100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
70
60
50
40
30
20
10
0
Fig. 3. A grayscale map of the elements in the upper left 80 × 80 corner of the
inverse coefficient matrix A
−1
arising from the diamond differenced S
N
equations
for N =16
the inverse of matrices arising from partial differential equations with local
spatial coupling [SM05]. The size of the off-diagonal elements decays slightly
as one moves away from the diagonal.
The time dependence of the Boltzmann equation also factors into struc-
ture of the inverse. In simulations where the time evolution is being carried
out with small CFL number timesteps the D matrix will dominate the coeffi-
cient matrix A. In this case the system is likely to be diagonally dominant. In
the case of diagonal dominance of a matrix that can be formulated in a block
tridiagonal form the inverse has elements that decay in size exponentially as
one moves away from the diagonal (see [AX96] Sect. 8.6 for details ). Such a
situation is ideal for approximate inverse preconditioners since the inverse can
be effectively approximated with only a few bands. If the timestep sizes are
increased eventually the behavior of the S
n
equation becomes more elliptic
and the decay behavior in the inverse becomes less pronounced. In the inverse
depicted in Fig. 3 the decay of the elements is slight as there is no time de-
pendence in this problem. However, even in the large CFL number timestep
limit simple SPAI preconditioners can continue to preform remarkably well.
A major advantage of the procedure for forming the SPAI preconditioner
is that under a spatial domain decomposition the least squares fit of each
row or column of the preconditioner can be performed in parallel with only
nearest-neighbor communication if the sparsity pattern involves elements cor-
responding to only nearby spatial zones. In general for the S
N
equation this
is true as the spatial discretization usually couples only a few neighboring
zones. This localized structure of the linear system can thus be exploited to
yield fairly effective parallel preconditioners for the S
N
equation.
Parallel Solution of the Time-Dependent S
N
Equations 479
4.3 A Brief Comparison of Approaches
In this section we offer a brief comparison of the source iteration and full
linear system solution approaches on a series of 1-D test problems with and
without reflective boundaries that illustrate a few of the points mentioned
in Sects. 4.1 and 4.3. For the sake of simplicity we consider the diamond-
difference scheme in Cartesian or slab geometry. The details of the source
iteration method and the DSA accelerator for this case are fully documented
in [AL77].
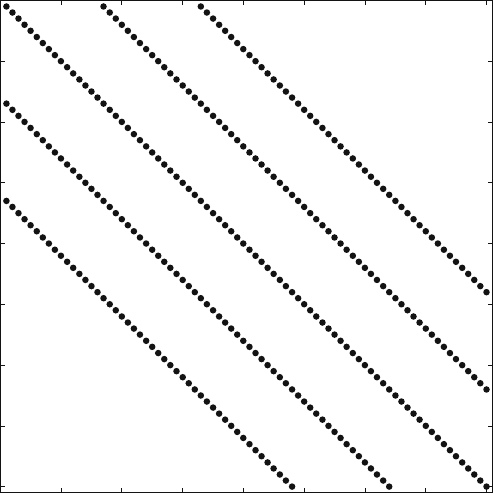
The full linear system solution is accomplished with the Bi-CGSTAB
algorithm. We consider a SPAI preconditioner with five non-zero elements
per row. The sparsity pattern for this preconditioner is shown in Fig. 4 where
we show the upper-left 80 × 80 corner of A
−1
. This preconditioner is easily
implemented and the values of the elements need only be computed once and
stored in an array. The storage cost of the vector is approximately the cost
of 5 unknown vectors.
The first problem we consider is a 1-D translucent slab with incoming
boundary conditions on either end. The problems is zoned into 1024 uniform
0
1
0
2
0 30
4
0 50 60
7
0 80
0
10
20
30
40
50
60
70
80
Fig. 4. A diagram of the sparsity pattern of the approximate inverse preconditioner
used in the comparison for N = 16. The spacing between the bands is equal to the
number of quadrature points

480 F.D. Swesty
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
Fig. 5. Number of Iterations versus the number of angular quadrature points for the
slab geometry problem. Circles denote the unaccelerated source iteration method.
Squares denote the unpreconditioned Bi-CGSTAB method. Triangles indicate the
Bi-CGSTAB preconditioned with a simple SPAI preconditioner with 5 non-zero
elements per row. Diamonds indicate source iteration with DSA acceleration
width zones and the opacity is such that each zone has an optical depth of
0.1. There are no sources and no time-dependence in the problem.
The comparative performance of the source iteration and Bi-CGSTAB
applied to the full linear system are shown in Fig. 5. The unpreconditioned Bi-
CGSTAB converges in substantially fewer iterations than does the source iter-
ation method. However, with the addition of a DSA accelerator the source it-
eration method converges in far fewer iterations than the Bi-CGSTAB+SPAI
combination. Also, the behavior is clearly independent of the angular resolu-
tion.
The second problem is almost identical to the first with the exception
that it has a reflective boundary on the right end of the computational do-
main. In this case results shown in Fig. 6 the Bi-CGSTAB+SPAI combination
proves superior converging in substantially fewer iterations than the source
iteration+DSA combination.
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
0
500
1000
1500
2000
2500
3000
3500
0 5 10 15 20 25 30
Iterations
Number of Quadrature Points
Fig. 6. Same as Fig. 5 but for the reflecting boundary problem