Johnson R.S. A Modern Introduction to the Mathematical Theory of Water Waves
Подождите немного. Документ загружается.

124
2
Some
classical
problems in water-wave theory
where
we
have
set
0(x^, h
0
, 0)
=
0,
as we may
always
do.
Now,
for a
finite-amplitude surface wave we must have
T
jr]dt->0
as T
->
0
+
,
o
but
for an
impulse we require
T
j(P
s
-P
a
)dt
0
to have
a
finite
and
nonzero limit
as T -> 0
+
;
this
is the
impulsive
pres-
sure. Hence the required initial condition (for the concentric wave) is that
0(x
x
, h
0
, 0) is to be specified. This condition is to be incorporated into the
determination
of
rj(r,
i)
(where
x
±
=
(r, 0),
and
there
is no
dependence
here
on 0).
It
is
clear that 0(r,
1,0
satisfies
the
same wave equation
as
rj(r,t),
equation (2.14), essentially
by
virtue
of
the boundary condition
cj)
t
+
rj
=
0 on z = 1;
see equation (2.67)
(and
note that
we
have reverted
to our non-
dimensional variables). Thus, immediately,
we
have
the
appropriate
solution
for 0 (cf.
equation (2.30))
as
where
oo
1,
t) =
Jpf(p)
1,0)
= J
cos(t^\j
0
(rp)
dp
pf(p)J
0
(rp) dp =/(r),
o
say,
and
rj(r,
0)
=
—
(p
t
(r,
1, 0)
=
0.
The
impulse that
we use (a
point
impulse)
is
modelled
by
/,
0 < r
<
a
0, r>a~
The
ship-wave
pattern 125
with a -> 0, so that
a
0
(pr)dr
= lfrJ
0
(
—•
la
2
I ydy = -la
2
as a -> 0,
if /a
2
is fixed. (We have written r
—
ay here and used the familiar result
Jo(x) -> 1 as x -> 0.) Thus, with/(p) = \la
2
= & say, we obtain
»7(r,
0 -
-0,(r,
1,
0 = ^//
/2
*in(tJf)Jo(rp)dp (2.114)
o
(from which we can determine the corresponding form taken by
77,(
r
>
0);
cf. Q2.19)). It is this solution, (2.114), for concentric waves on deep water
generated by a point impulse, which we now examine.
This first stage of the calculation follows precisely that presented in
Section
2.1.3.
We introduce the integral representation of J
o
(see equation
(2.31)) and then write
rj
as the real part of the sum of two integrals (as in
equation (2.32). This is transformed according to
and then we use Kelvin's method of stationary phase for a
->•
oo to give
(2.115)
cf. equation (2.36). This calculation, which parallels that described in
Section
2.1.3,
is left as an exercise (Q2.50). Our task now is to incorporate
this result into a description of the waves generated when the point
impulse moves along a prescribed path.
The point impulse - a ship, perhaps - moves on the surface of
the
water
along a path F, described in Cartesian coordinates by
x
±
=
(X(t),
Y(t)l
where t is the time elapsed since the ship (let us call it that) was at the
point P', namely at (X, Y); the ship is now at P, the origin of coordinates.
The path is assumed smooth (so that both X(t) and Y(t) are (at least)
once-differentiable functions) and then the X-axis is chosen to be tangent
126
2 Some classical problems in water-wave theory
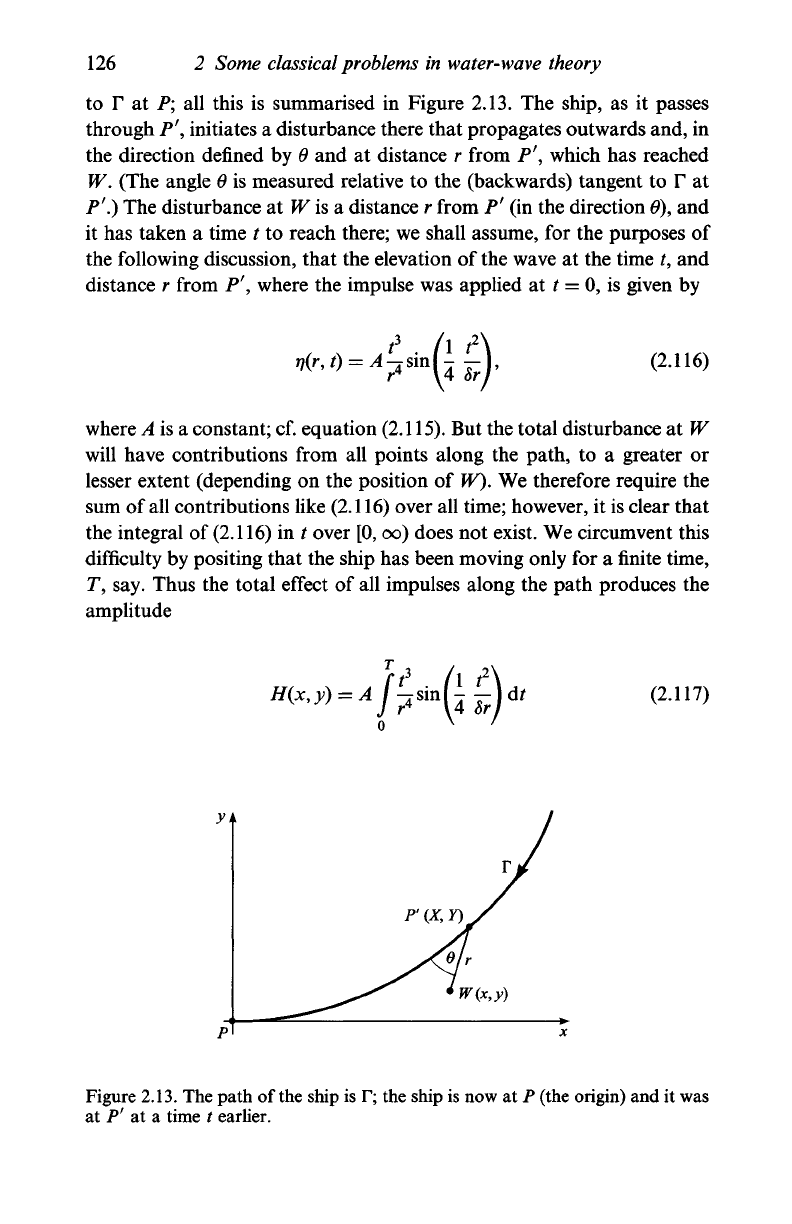
to F at P; all this is summarised in Figure 2.13. The ship, as it passes
through P\ initiates a disturbance there that propagates outwards and, in
the direction defined by 0 and at distance r from P\ which has reached
W. (The angle 0 is measured relative to the (backwards) tangent to r at
P
f
.)
The disturbance at W is a distance r from P' (in the direction
0),
and
it has taken a time t to reach there; we shall assume, for the purposes of
the following discussion, that the elevation of the wave at the time t, and
distance r from P\ where the impulse was applied at t = 0, is given by
r,t) = A-g (2.116)
where A is a constant; cf. equation
(2.115).
But the total disturbance at W
will have contributions from all points along the path, to a greater or
lesser extent (depending on the position of W). We therefore require the
sum of
all
contributions like (2.116) over all time; however, it is clear that
the integral of (2.116) in t over
[0,
oo) does not exist. We circumvent this
difficulty by positing that the ship has been moving only for a finite time,
T, say. Thus the total effect of all impulses along the path produces the
amplitude
(2.117)
Figure
2.13.
The path of the ship is F; the ship is now at P (the origin) and it was
at P' at a time t earlier.
The
ship-wave
pattern
127
at
W,
where
r
2
= (x - X{i)f + (y - Y(i)f. (It is
clear that this integral
also does
not
exist
for
points on
the
ship's path, where
r =
0; however,
the
method
of
stationary phase that
led to
(2.115)
has
already been inter-
preted only
for
points away from
r =
0:
we are
seeking
the
wave pattern
as seen some distance from
the
ship.)
To proceed,
we
express (2.117)
in the
form
H(x,y)
= AA
/^exp(U
2
/4Sr)df
1,
(2.118)
and
we
have previously used
a
—
P'/Sr
-» oo;
thus
we may
apply
the
method
of
stationary phase
yet
once more!
The
point(s)
of
stationary
phase occur where
m--
for
r = r(0,
UM r /
at fixed
x,
y: thus
? =
-•
(2-119)
At
t
v J
(The fact that
we are
treating
o =
cr(t),
and a -> oo is
required
for the
method
of
stationary phase,
is
irrelevant
in the
application
of the
method.)
But
from
we have
(at
fixed
(JC,
y))
_dt' dt)
= rU(t)cosO,
where
U{i)
(= ^(dX/dtf + (dY/dtf) is the speed of the ship, so (since
^=UcosO. (2.120)
Thus
the
condition
of
stationary phase, (2.119), becomes
= ^Utcos$,
(2.121)
128
2 Some classical problems in water-wave theory
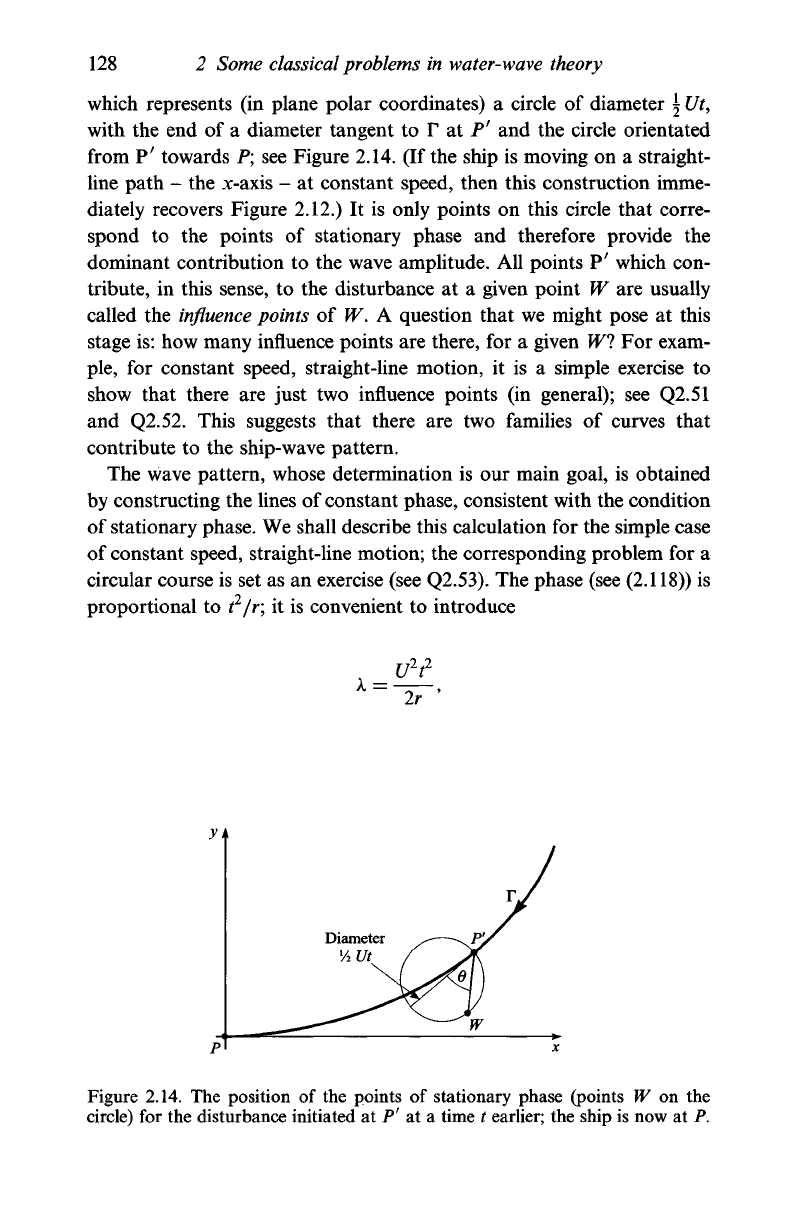
which represents (in plane polar coordinates) a circle of diameter \ Ut,
with the end of a diameter tangent to r at P
r
and the circle orientated
from P' towards P; see Figure 2.14. (If the ship is moving on a straight-
line path - the x-axis - at constant speed, then this construction imme-
diately recovers Figure 2.12.) It is only points on this circle that corre-
spond to the points of stationary phase and therefore provide the
dominant contribution to the wave amplitude. All points P' which con-
tribute, in this sense, to the disturbance at a given point W are usually
called the
influence
points of W. A question that we might pose at this
stage is: how many influence points are there, for a given Wl For exam-
ple,
for constant speed, straight-line motion, it is a simple exercise to
show that there are just two influence points (in general); see Q2.51
and Q2.52. This suggests that there are two families of curves that
contribute to the ship-wave pattern.
The wave pattern, whose determination is our main goal, is obtained
by constructing the lines of constant phase, consistent with the condition
of stationary phase. We shall describe this calculation for the simple case
of constant speed, straight-line motion; the corresponding problem for a
circular course is set as an exercise (see Q2.53). The phase (see (2.118)) is
proportional to t
2
/r; it is convenient to introduce
u
2
?
2r '
Figure 2.14. The position of the points of stationary phase (points W on the
circle) for the disturbance initiated at P' at a time t earlier; the ship is now at P.
The
ship-wave pattern
129
where U is the constant speed of the ship, and then
A
= constant yields
the curves of constant phase. But the condition of stationary phase, from
(2.121),
yields
rUt =
-U
2
t
2
cos 0
= kr
cos 0
so
Ut = kcosO,
and then
r = -UtcosO = -Acos
2
0.
(2.122)
(In fact, the equations (2.122) are valid for any path and, indeed, in the
construction of
these
equations we may allow U =
U(t).)
The path here is
simply
X = Ut, Y = 0,
and then any point W is
x = Ut
—
r
cos 0,
y =
—r
sin 0,
where r and
0
are shown in Figure
2.13.
Thus, using equations (2.122), we
obtain directly
x = A(cos0--cos
3
0), y = - - k
cos
2
0 sin
0,
(2.123)
which are the parametric equations (parameter
0)
for the dominant con-
tribution to the wave pattern, each wave crest/trough being associated
with a fixed value of
X.
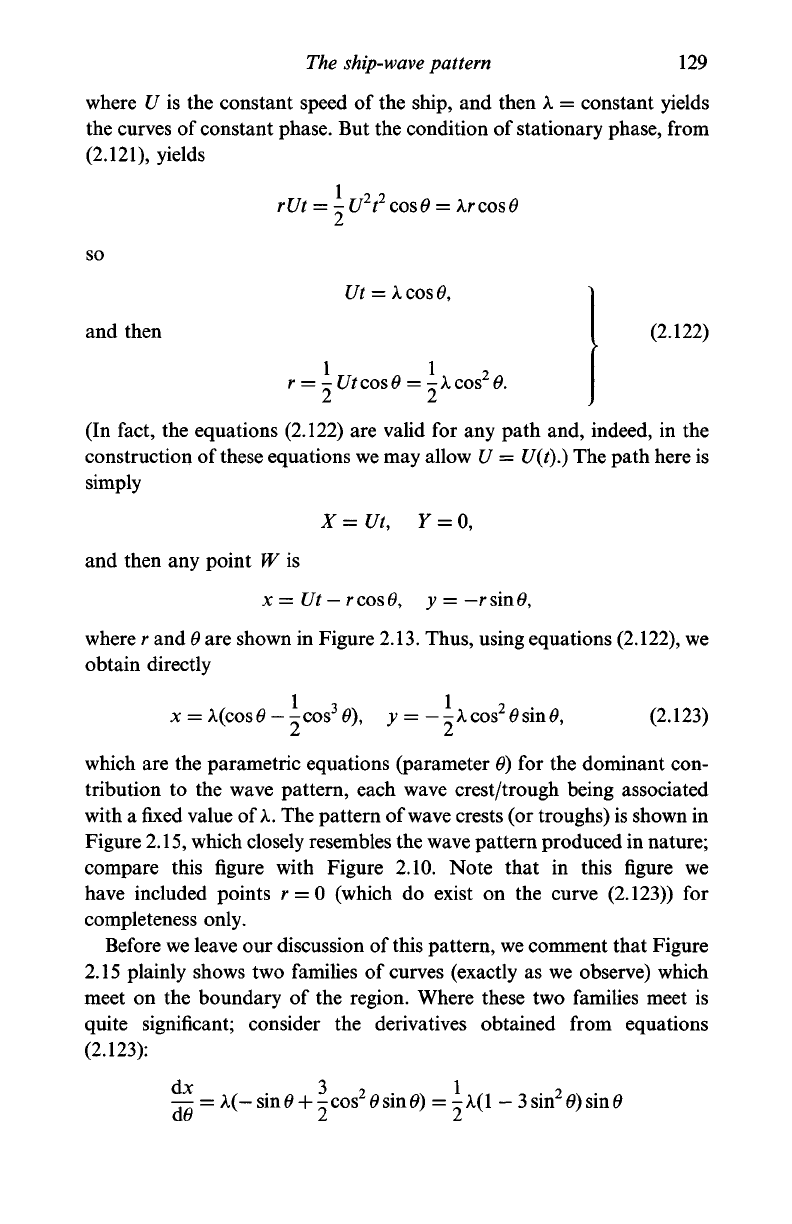
The pattern of wave crests (or troughs) is shown in
Figure
2.15,
which closely resembles the wave pattern produced in nature;
compare this figure with Figure 2.10. Note that in this figure we
have included points r = 0 (which do exist on the curve (2.123)) for
completeness only.
Before we leave our discussion of
this
pattern, we comment that Figure
2.15 plainly shows two families of curves (exactly as we observe) which
meet on the boundary of the region. Where these two families meet is
quite significant; consider the derivatives obtained from equations
(2.123):
dx 3 i 1 i
— = X(-
sinO
+ -cos
2
0sin0) = -A(1 - 3sin
2
6)sin0
Q.0 2 2
130 2 Some classical problems in water-wave theory
y
0.3-
0.2-
o.i-
Transverse system
0.2 0.4
0.6 0.8
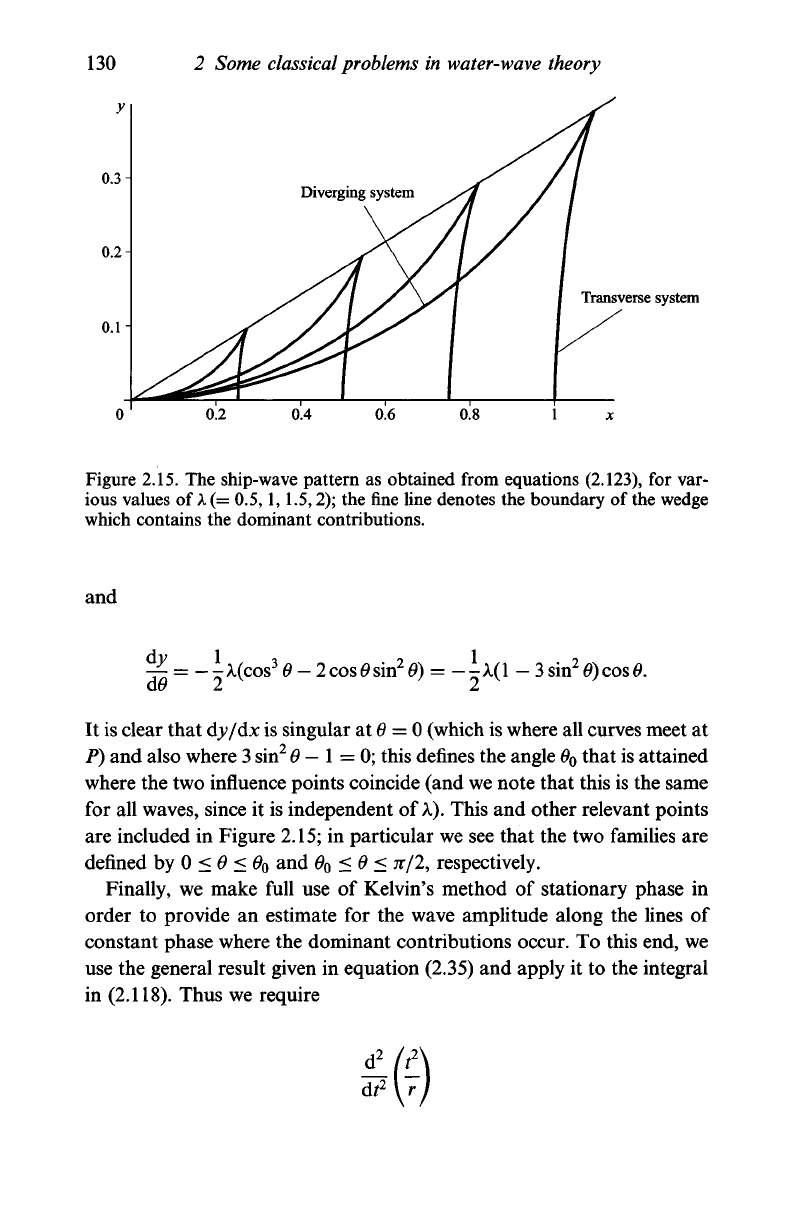
Figure 2.15. The ship-wave pattern as obtained from equations (2.123), for var-
ious values of k
(=
0.5,1,1.5,2); the fine line denotes the boundary of the wedge
which contains the dominant contributions.
and
^ = -1 A,(cos
3
0 - 2 cos 0 sin
2
0) = - \k{\ - 3 sin
2
6)
cos 0.
&0
2 2
It is clear that dy/dx is singular at 0 = 0 (which is where all curves meet at
P) and also where 3 sin
2
0—1=0; this defines the angle
0
O
that is attained
where the two influence points coincide (and we note that this is the same
for all waves, since it is independent of
A).
This and other relevant points
are included in Figure 2.15; in particular we see that the two families are
defined by 0 < 0 < 0
0
and 0
0
< 0 <
TT/2,
respectively.
Finally, we make full use of Kelvin's method of stationary phase in
order to provide an estimate for the wave amplitude along the lines of
constant phase where the dominant contributions occur. To this end, we
use the general result given in equation (2.35) and apply it to the integral
in (2.118). Thus we require
The ship-wave pattern 131
evaluated at the points of stationary phase; first we have
dt
2
\ r) ~ dt\
r
r
2
dt) r r
2
dt
+
r
3
\dt) r
2
dt
2
which, on lines dr/dt = 2r/t (equation (2.119), for stationary phase),
yields the expression
-A.
(1,24)
But on these lines we also have, (2.120),
which gives
dr
— = UcosO,
dt
d
2
r
TT
d0 . „
dt
2
dt
since U = constant; now we must find dO/dt.
For the straight-line course (along y = Y = 0), at constant speed U, we
see that (cf. Figure 2.13)
0 + arctanf—-—\ =
TC
\Ut - x)
with X = Ut. Thus, at fixed (x, y), we obtain
dO yU
= Q
dt
(x-utf+y
2
and we also have sin(7T
—
0) = —y/r where r
2
= (x
—
Ut)
2
+y
2
; hence
and so
dO U .
— = sin 0
dt r
d
2
r U
2
.
2
-—.
= —sin 0.
dt
2
r
The expression (2.124) therefore becomes
= -(1 - 3 sin
2
6)/cos
2
6, (2.125)
132
2
Some classical problems
in
water-wave theory
which
we
observe
is
zero
at
0
=
0
O
(=
±arcsin(l/\/3)) where
the two
families of wave crests/troughs meet. Further, we must include two domi-
nant contributions
to the
wave amplitude
- one
from each family
(although, perhaps,
we may
find that
one of
these dominates
the
other).
Since
the two
families
are
generated
(in y > 0) by 0 < 0
< 6
0
and 0
0
<0
<
n/2,
respectively, we see from (2.125) that
and
—j
l-\ < 0 for
<9
0
< 0 <
7r/2.
For
a
given point,
W, we let the
contribution
in the
range
0 < 0
< 0
0
-
usually called the
transverse
wave system
-
be designated by the subscript
t, and for the
other contribution, usually called
the
diverging
system,
we
shall write
the
subscript d; this terminology
is
used
in
Figure 2.15.
The
two
terms that provide
the
dominant asymptotic behaviour
(as
t
2
/8r
->
oo), according
to
Kelvin's result (2.35), therefore yield (after
a
little manipulation)
±1
.
fn cos
0
t
Gxp{i(r/8a
2
+
TT/4)}
A
^
r
a]yj\ -
3 sin
2
0
t
fn cos 0
d
exp{i(r/8o% -
TV/4)}
-1
(2.126)
Here, we have substituted
for
time
t
from (2.121)
and
written
1.
2'
a
q
=-UcosO
q
(q
= t,d).
The solution expressed by (2.126) is the final result that we present in this
section.
We see
that both contributions
are of
the same order, that
the
amplitude decays like r~
1/2
away from the ship's path, but that the ampli-
tude
is
undefined where
the two
families meet
(at 0
t
=
6
d
=
0
0
= arcsin(l/>/3)).
(The
amplitude
is
also undefined where
0
d
= n/2, but
this
is at
P, the origin, and is
to
be expected because
of
the nature
of
our
point impulse model.)
An
analysis
can be
performed,
by
taking Kelvin's
method
of
stationary phase
to the
next order,
for the
case
9
t
=
0
d
=
0
0
;
The
ship-wave pattern
133
the wave amplitude can then be shown to be
finite
but now it behaves like
r~
1/3
away from the ship's path. This goes some way to explaining why
the waves near the edge of the wedge-shaped region are observed so
readily: they are larger than those nearby and on each of the families
separately. Finally, we note that the two systems of waves, transverse and
diverging, have a phase difference of n/2 even when ct
t
« a
d
. Thus we
anticipate that near the edge of the wedge, where a
t
and a
d
are nearly
equal, a phase difference will be evident; this is, indeed, seen in well-
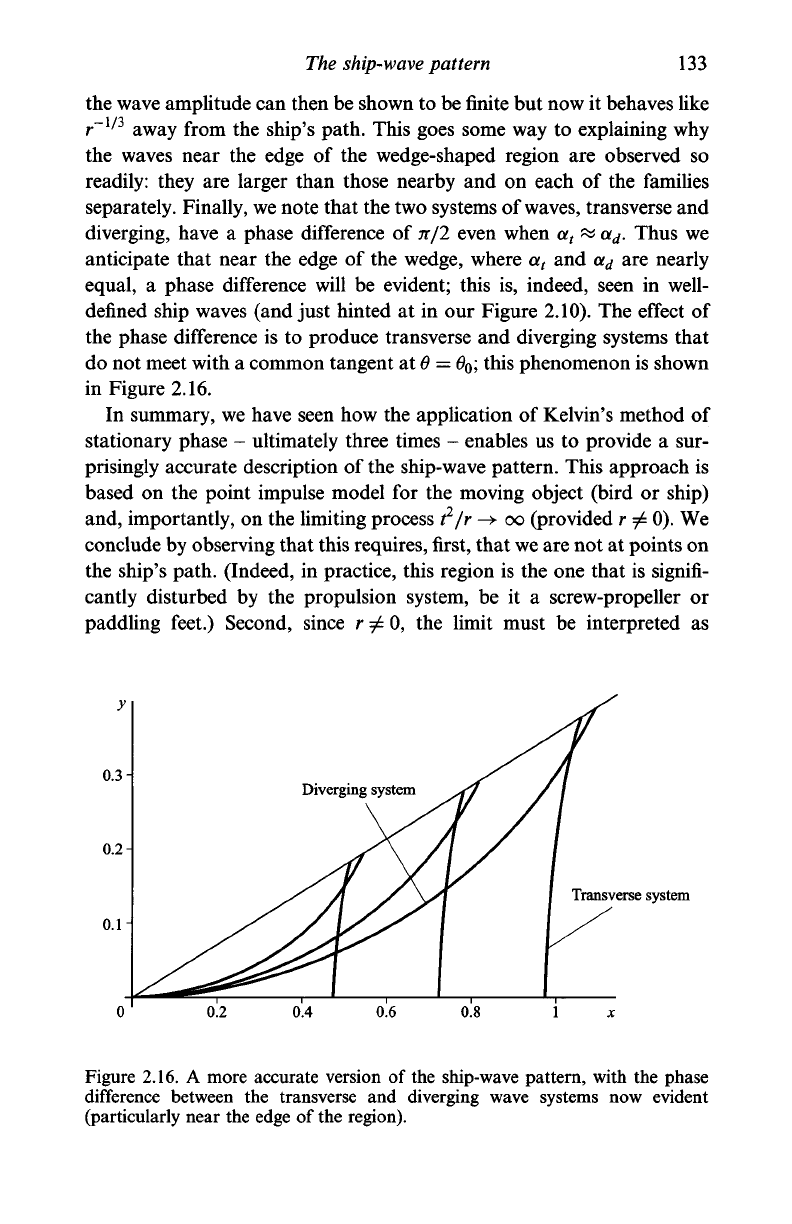
defined ship waves (and just hinted at in our Figure 2.10). The effect of
the phase difference is to produce transverse and diverging systems that
do not meet with a common tangent at
6
=
0
O
;
this phenomenon is shown
in Figure 2.16.
In summary, we have seen how the application of Kelvin's method of
stationary phase - ultimately three times - enables us to provide a sur-
prisingly accurate description of the ship-wave pattern. This approach is
based on the point impulse model for the moving object (bird or ship)
and, importantly, on the limiting process t
2
/r -» oo (provided r ^ 0). We
conclude by observing that this requires, first, that
we
are not at points on
the ship's path. (Indeed, in practice, this region is the one that is signifi-
cantly disturbed by the propulsion system, be it a screw-propeller or
paddling feet.) Second, since r ^ 0, the limit must be interpreted as
Transverse system
0.2 0.4 0.6 0.8
Figure 2.16. A more accurate version of the ship-wave pattern, with the phase
difference between the transverse and diverging wave systems now evident
(particularly near the edge of the region).