Lazinica A. (ed.) Particle Swarm Optimization
Подождите немного. Документ загружается.

28
Particle Swarms for Continuous, Binary, and
Discrete Search Spaces
Lisa Osadciw and Kalyan Veeramachaneni
Department of Electrical Engineering and Computer Science, Syracuse University
NY, U.S.A.
1. Introduction
Swarm Intelligence is an adaptive computing technique that gains knowledge from the
collective behavior of a decentralized system composed of simple agents interacting locally
with each other and the environment. There is no centralized command or control dictating
the behavior of these agents. The local interactions among these agents cause a global
pattern to emerge from which problems are solved. The foundation of swarming theory was
given in 1969. Two scientists, Keller and Segel, in their paper, “Slime mold aggregation”,
challenged the traditional pacemaker theory [47]. They suggested that the slime mold
aggregation is a result of mutual interactions among different cells rather than the
traditional belief that the aggregation is directed by a pacemaker cell. This theory became
the basis for swarm theory. In emergent systems, an interconnected system of rel- atively
simple agents self-organize to form a more complex, adaptive, higher-level behav- ior. To
attain this complex behavior, these elements follow simple rules (e.g., the rule defined by
the “Social Impact Theory” [18]). Examples of such systems can be found abundant in
nature including ant colonies, bird flocking, animal herding, honey bees, bac- teria, and
many more. These natural systems are optimizing using certain criteria during local
interactions so that the routes optimize as ants trace the way to food. The ants may be
designed to achieve goals other than locating food adding more dimensions to the basic
algorithm. From closely observing these highly decentralized behaviors, a “swarm-like”
algorithm emerges such as the Ant Colony Optimization (ACO) and Particle Swarm Opti-
mization (PSO). The ACO and PSO have been applied successfully to solve real-world
optimization problems in engineering and telecommunication [8, 9]. Swarm Intelligence
algorithms have many features in common with Evolutionary Algorithms. Evolutionary
algorithms are population based stochastic algorithms in which the population evolves over
a number of iterations using simple operations. Like EA, SI models are population- based.
The system is randomly initialized with a population of individuals, i.e., potential solutions.
These individuals move in search patterns over many iterations following sim- ple rules,
which mimic the social and cognitive behavior of insects or animals as they try to locate a
prize or optima. Unlike EA, SI based algorithms do not use evolutionary opera- tors such as
crossover and mutation.
Particle Swarm Optimization algorithm (PSO) was originally by Kennedy and Eber- hart in
1995 [18], and with social and cognitive behavior, has become widely used for optimization

Particle Swarm Optimization
452
problems found in engineering and computer science. PSO was inspired by insect swarms
and has since proven to be a powerful competitor to other evolutionary algorithms such as
genetic algorithms [41].
Comparisons between PSO and the standard Genetic algorithms (another kind of evo-
lutionary algorithms) have been done analytically based on performance in [41]. Com-
pared to Genetic algorithms the PSO tends to converge more quickly to the best solution.
The PSO algorithm simulates social behavior by sharing information concerning the best
solution. An attraction of some sort is formed with these “better” solutions helping improve
their own best solution until all converge to the single “best” solution. Each par- ticle
representing a single intersection of all search dimensions.
The particles evaluate their positions using a fitness that is in the form of a mathemati- cal
measure using the solution dimensions. Particles in a local neighborhood share memo- ries
of their “best” positions; then they use those memories to adjust their own velocities and,
thus, positions. The original PSO formulae developed by Kennedy and Eberhart were
modified by Shi and Eberhart [68] with the introduction of an inertia parameter,
ω
, that
was shown empirically to improve the overall performance of PSO.
The number of successful applications of swarm optimization algorithms is increasing
exponentially. The most recent uses of these algorithms include cluster head identification in
wireless sensor networks in [69], shortest communication route in sensor networks in [9]
and identifying optimal hierarchy in decentralized sensor networks.
In the next section the particle swarm for continuous search spaces is presented. The
continuous particle swarm optimization algorithm has been a research topic for more than
decade. The affect of the parameters on the convergence of the swarm has been well stud-
ied in. The neighborhood topolgies and different variations are presented extensively in. In
this chapter we will focus on the binary and the discrete version of the algorithm. The
binary version of the algorithm is presented in section 2.2 and the discrete version of the
algorithm is presented in section 2.3. The binary and the discrete version of the algorithm-
make the particles search in the probablistic search space. The infinite range of the veloci-
ties are transformed into a bounded probabilistic space. The transformations and the
algorithms are detailed in this chapter. The affect of the parameters are briefly detailed in
this chapter. The performance of these algorithms are presented on simple functions. The
chapter is accompanied by a code written in MATLAB that can be used by the readers.
2. Particle Swarms for Continuous Spaces
The PSO formulae define each particle as a potential solution to a problem in a D-
dimensional space with the i
th
particle represented as
123
( , , ,....... )
iiii iD
X
xxx x= . Each particle
also maintains a memory of its previous best position, designated as pbest,
123
( , , ,....... )
iiii iD
Pppp p=
, and a velocity along each dimension represented as
123
( , , ,....... )
iiii iD
Vvvv v= . In each generation, the previous best, pbest, of the particle com-bines
with the best fitness in the local neighborhood, designated gbest. A velocity is com- puted
using these values along each dimension moving the particle to a new solution. The portion
of the adjustment to the velocity influenced by the individual’s previous best posi- tion is
considered as the cognition component, and the portion influenced by the best in the
neighborhood is the social component.
In early versions of the algorithm, these formulae are
Particle Swarms for Continuous, Binary, and Discrete Search Spaces
453
(1)
(2)
Constants
1
ψ
and
2
ψ
determine the relative influence of the social and the cognition
components, and the weights on these components are set to influence the motion to a new
solution. Often this is same value to give each component (the cognition and the social
learning rates) equal weight. A constant,
max
V , is often used to limit the velocities of the
particles and improve the resolution of the search space.
The algorithm is primarily used to search continuous search spaces. The pseudocode of the
algorithm for the continuous search spaces is shown in Figure 1.
Algorithm PSO:
For t= 1 to the max. bound of the number on generations,
For i=1 to the population size,
For d=1 to the problem dimensionality,
Apply the velocity update equation:
where P
i
is the best position visited so far by X
i
,
P
g
is the best position visited so far by any particle
Limit magnitude:
Update Position:
End- for-d;
Compute fitness of
;
If needed, update historical information regarding Pi and Pg;
End-for-i;
Terminate if Pg meets problem requirements;
End-for-t;
End algorithm.
Figure 1. Pseudocode for the Continuous PSO Algorithm
Example 1: Continuous PSO on a simple spheres function : Minimize the function
The MATLAB code for the above problem as solved by the particle swarm optimiza- tion
algorithm is provided along with the chapter. In the following solution 10 particles are
Particle Swarm Optimization
454
randomly intialized in the search space. The evolution of the particles after 10, 100 and 1000
iterations in the search space are shown for a 2-D problem.
3. Binary Search Spaces
The binary version of the Particle swarm optimization is needed for discrete, binary search
spaces. Many variables in the sensor management problems are binary, for example the
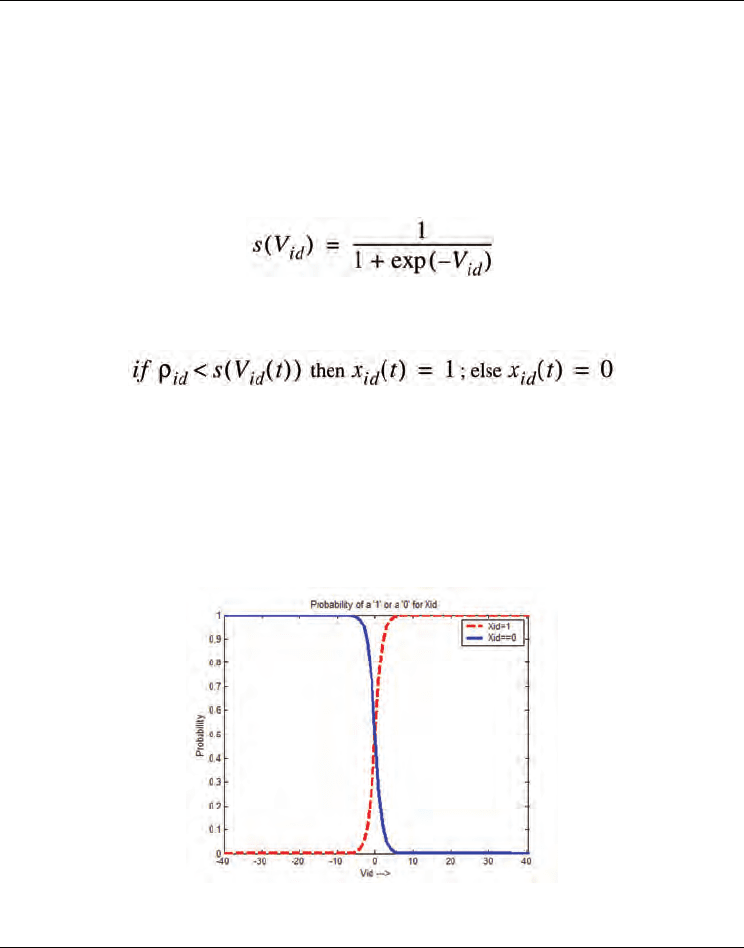
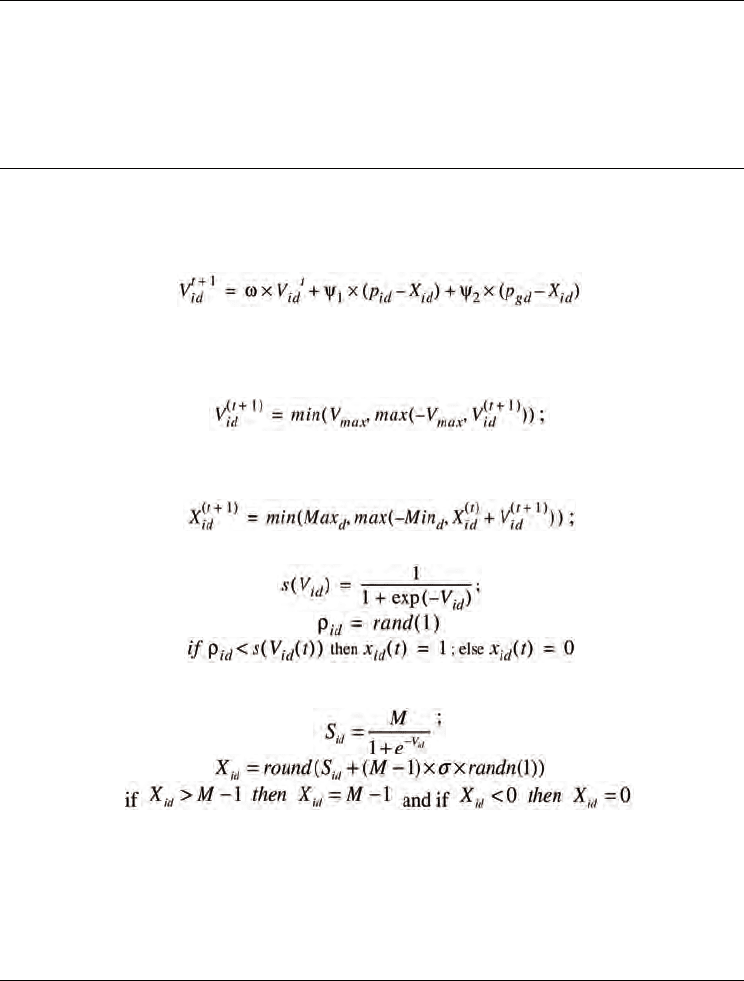
fusion rule for binary hypothesis testing is binary valued. A sigmoid function trans- forms
the infinite range of the velocities to a requisite 0 or 1. The sigmoid function is
(3)
where V
id
is the velocity of the ith particle along the dth dimension. The velocity update
equation remains the same as section 2.1. The position update equation is modified as
(4)
where
id
ρ
is a random number drawn from a uniform distribution between
0,1U
⎡⎤
⎣⎦
.
These formula are iterated repeatedly over each dimension of each particle, and updating
the pbest vector if a better solution is found. This is similar to the PSO for continuous search
spaces.
By following the above procedure, we transform the entire continuous velocity space,
,−∞ ∞
⎡⎤
⎣⎦
, is transformed into a one or zero for that dimension. The probability of 1
and probability of zero for different velocities is shown in Figure 2.
Figure 2. Probability of X
id
=1 and X
id
=0 given the V
id
Algorithm Binary PSO:
For t= 1 to the max. bound of the number on generations,
For i=1 to the population size,
For d=1 to the problem dimensionality,
Apply the velocity update equation:
Particle Swarms for Continuous, Binary, and Discrete Search Spaces
455
where P
i
is the best position visited so far by X
i
,
P
g
is the best position visited so far by any particle
Limit magnitude:
Update Position:
End- for-d;
Compute fitness of ;
If needed, update historical information regarding Pi and Pg;
End-for-i;
Terminate if Pg meets problem requirements;
End-for-t;
End algorithm.
Figure 3. Pseudocode for the Binary PSO Algorithm
Example 2: Goldberg’s Order-Three Problem
Groups of three bits are combined to form disjoint subsets and the fitness is evaluated using
where each si is a disjoint 3-bit substring of x and
where |si| denotes the sum of the bits in the 3-bit substring
.
2. 3 Particle Swarms for Discrete Multi Valued Search Spaces
Extending this binary model of PSO, a discrete multi-valued particle swarm for any range of
discrete values is described in detail. Many real world optimization problems, including
signal design, power management in sensor networks, and scheduling have vari- ables
which have discrete multi-values. This need is increasing as more problems are being solved
by particle swarm optimization based algorithm [73, 74]. It can be argued instead that
Particle Swarm Optimization
456
discrete variables can be transformed into an equivalent binary representation, and the
binary PSO can simply be used. However, the range of the discrete variables does not
typically correspond to a power of 2 for the equivalent binary representation. This then
generates a range of values exceeding the real range resulting in an unbalanced conver-
gence and more iterations than necessary. For example, a discrete variable ranging from 0
to5 [0,1,2,3,4,5] requires a minimum of three bit binary representation, which ranges
between [0-7]. Special conditions need to be added reducing the algorithms efficiency to
manage the values beyond the original maximum, which in this example is, 6 & 7. Another
important factor is that the Hamming distances between the two discrete values, undergoes
a non-linear transformation using the equivalent binary representation. This often adds to
the complexity to the search process. The inefficiency emerges as an increase in the
dimensions of the particle adding more variables to the search. For these reasons, a discrete
multi valued PSO is more efficient and should be used for discrete ranges greater than 2.
Previously, researchers simply enhanced the performance of the binary PSO to fix the
efficiency. Al-Kazemi, et al. [75], improved the original binary PSO algorithm by modify-
ing the way particles interact. The research on designing a PSO for discrete multi-valued
problems, however, has been sparse. In MVPSO [74], Jim, et al, extended the binary PSO by
creating a multi dimensional particle. Each dimension of the original problem is subdi-
vided into three dimensions for a ternary problem. Each dimension of the particle is a real
valued number and is transformed into a number in the range of [0 1] using the sigmoid
function. After a series of transformations, the three numbers ultimately represent the
probability of having a one of three discrete values for a ternary system. The extra trans-
formations bring us closer to the new discrete multi-valued PSO except many operations are
added. The transition of a particle or position update is probabilistic similar to the binary
PSO.
For discrete multi valued optimization problems, the range of variables lie between 0 and
M-1, where ‘M’ implies an M-ary number system. The same velocity update and par- ticle
representation are used in this algorithm. The position update equation is, however, change
as follows.
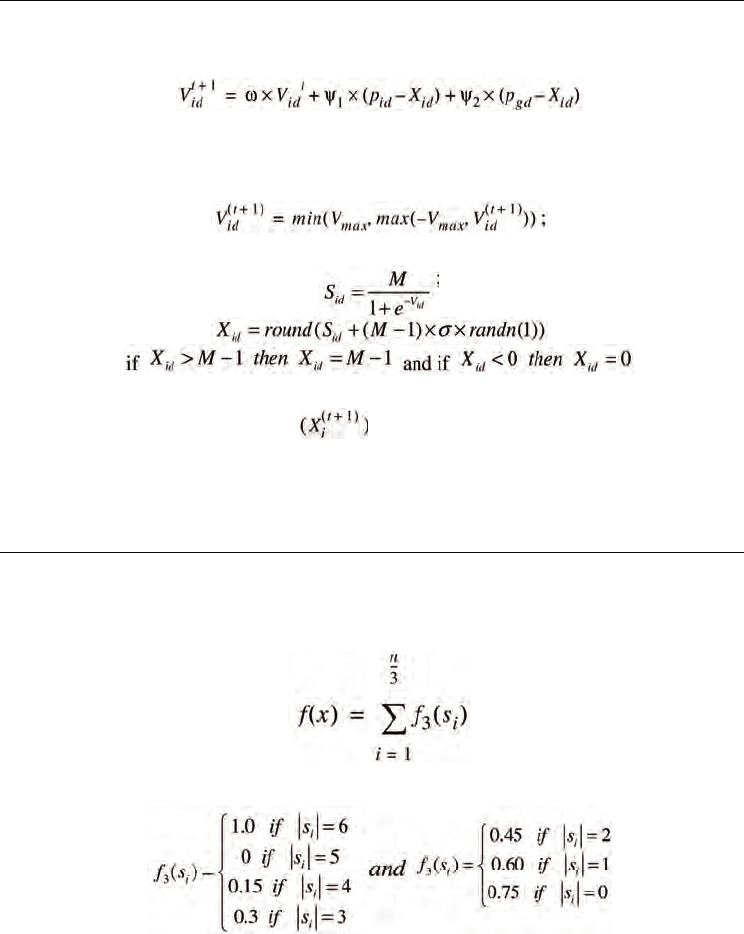
1. Transform the velocity using
(5)
2. A number is the generated using a normal distribution with
id
S=
μ
and
σ
as
parameters.
(6)
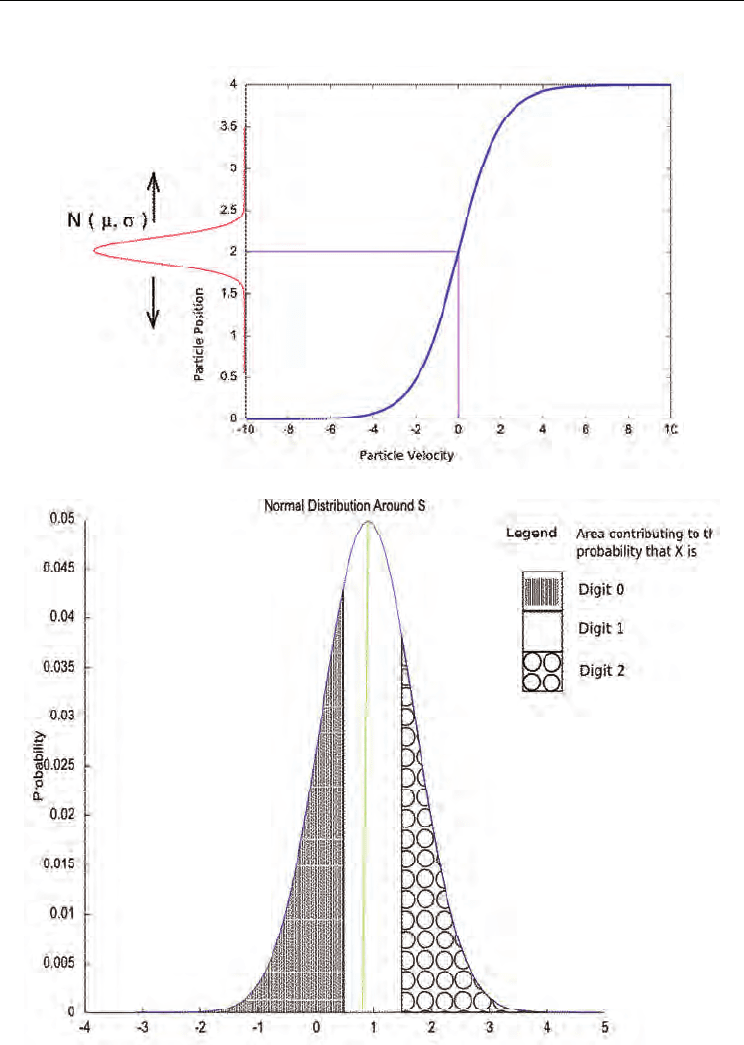
3. The number is rounded to the closest discrete variable with the end points fixed.
(7)
(8)
4. . The velocity update equation remains the same as (1). The positions of the particles are
discrete values between 0 and M-1. Now for any given S
id
, we have an associated
probability for any number between [0, M-1]. However, the probability of drawing a
num- ber randomly reduces based on its distance from S
id
according to the Figure 4. In
Particle Swarms for Continuous, Binary, and Discrete Search Spaces
457
the subsection, the relation between Sid and the probability of a discrete variables is
given.
Figure 4. Transformation of the Particle Velocity to a Discrete Variable
Figure 5. Probabilities of Different Digits Given a Particular S
Particle Swarm Optimization
458
Probability of a discrete value ‘m’: For a given S, a number is generated using a normal
distribution with the mean as S and standard deviation
σ
for an M-ary system. Based on
this normal distribution and equation (7), the probability for a specific discrete variables
given S can be calculated based on the area under that region of the Gaussian curve. For
example for a ternary system, given an S = 0.9 and
σ
= 0.8, the areas of the Gaussian curve
that will contribute to different digits are shown in Figure 5. For a S
id
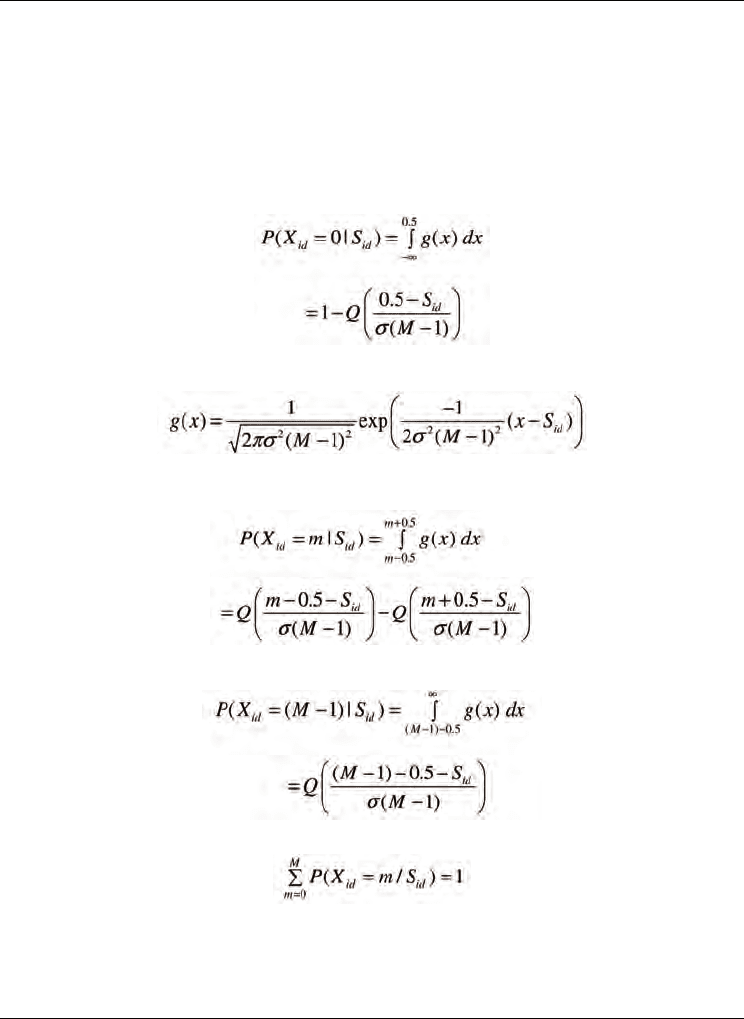
, the probability of a
discrete variable having a value ‘m’ is given by:
m=0,
(9)
where Q is the error function. The function g(x) is
(10)
with m in the range 1 to M-2, the conditional probability of achieving X
id
given a previous
S
id
value is
(11)
For m = M-1, the conditional probability is
(12)
Note that
(13)
One can significantly control the performance of the algorithm using these equations. For
example, controlling the
σ
controls the standard deviation of the Gaussian and, hence, the
probabilities of various discrete variables.
Algorithm Discrete PSO:
For t= 1 to the max. bound of the number on generations,
For i=1 to the population size,
Particle Swarms for Continuous, Binary, and Discrete Search Spaces
459
For d=1 to the problem dimensionality,
Apply the velocity update equation:
where P
i
is the best position visited so far by X
i
,
P
g
is the best position visited so far by any particle
Limit magnitude:
Update Position:
End- for-d;
Compute fitness of
;
If needed, update historical information regarding Pi and Pg;
End-for-i;
Terminate if Pg meets problem requirements;
End-for-t;
End algorithm.
Figure 6. Psuedo Code for Particle Swarms for Discrete Multi Valued Search Spaces
Example 3: Sastry-Veermachaneni-Osadciw Function for Ternary Systems
Groups of three digits are combined to form disjoint subsets and the fitness is evalu- ated using
where each s
i
is a disjoint 3-bit substring of x and
where |s
i
| denotes the sum of the digits in the 3-digit substring.
2.4 Particle Swarms for Mixed Search Spaces
Mixed search spaces imply that the solution to the problem is composed of binary, dis- crete
and continuous variables. The solution can be any combination of two. The particle swarm
Particle Swarm Optimization
460
optimization algorithms operators work independently on each dimension making it
possible for mixing different variable types into one single particle. In Genetic algo- rithms,
however, the crossover operator needs to be designed independently for the differ- ent
variable types. The swarm algorithm will call upon the different position update formulae
based on the type of the variable. The pseudo code is given in the following fig ure.
Algorithm PSO for Mixed Search Spaces:
For t= 1 to the max. bound of the number on generations,
For i=1 to the population size,
For d=1 to the problem dimensionality,
Apply the velocity update equation:
where P
i
is the best position visited so far by X
i
,
P
g
is the best position visited so far by any particle
Limit magnitude:
Update Position:
if X
id
is continuous valued
else if X
id
is binary valued
elseif X
id
is discrete valued
End- for-d;
Compute fitness of (X
i
t
+ 1
);
If needed, update historical information regarding Pi and Pg;
End-for-i;
Terminate if Pg meets problem requirements;
End-for-t;
End algorithm.
Figure 7. Pseudo code for mixed search spaces