Лекции - Физические основы измерений
Подождите немного. Документ загружается.

ω n
2
S Вт = ε
2
. умножим и разделим ε
2
на Hl.
ε
2
= ω n
2
S Вт · (Hl/ Hl); S Вт = Φ
м;
; Φ
м
/ Hl = 1/ R
м
; Hl= I
1
n
1
.
ε
2 =
ω n
1
n
2
I
1
/ R
X
м
.
R
X
- взаимное магнитное сопротивление.
Если считать Φ
1
= Φ
2
то R
X
м
= R
м
.
Магнитная цепь трансформаторного преобразователя аналогична
магнитной цепи индуктивного, поэтому функция преобразования имеет вид:
ε
2 =
ω n
1
n
2
I
1
µ
0
S (2 δ + lст / µ).
Пренебрегая магнитным сопротивлением стали lст/µ
0
«2 δ, получим:
ε
2
= ω n
1
n
2
I
1
µ
0
S / 2 δ.
ε
2
будет зависеть только от δ, если ток I1 не зависит от перемещения
якоря. Однако, если преобразователь включить к источнику стабильного
напряжения U
1
, то при уменьшении воздушного зазора δ возрастает
индуктивность первичной обмотки (см. индуктивный преобразователь) L
1
и
сопротивление первичной цепи ω L
1
, что ведет к уменьшению тока I1 и
вторичной ЭДС ε
2
. она будет меньше расчетной.
Большей стабильностью первичного тока обладает дифференциальный
преобразователь. У него первичные обмотки соединены последовательно, а
вторичные – встречно. При перемещении якоря сопротивление одного Z1
возрастает, а другого Z2 уменьшается. В целом сопротивление первичной
цепи остается без изменения, а ток I1 – постоянным и равным
I1= U1 / (Z1+ Z2) ≈ U1 / (2ωL
0
),
а ЭДС зависит только от зазора S.
ЭДС дифференциального преобразователя равно разности ЭДС
одинарных, так как они включены встречно
ε
2
= ε
21
- ε
22
.
Чувствительность возрастает в 2 раза относительно одинарного.
Электрические цепи первичной и вторичной развязаны. Все причины
вызывающие погрешности трансформаторных аналогичны индуктивным, но
имеются специфические причины, обусловленные протеканием тока во
вторичных обмотках и изменением их сопротивления. Погрешность
отсутствует при измерении ЭДС ε
2
компенсационным методом.
§4. Тензорезисторы
Измерение малых перемещений можно осуществить с помощью
тензорезисторных преобразователей.
В основе работы тензорезисторов лежит явление тензоэффекта,
заключается в изменении активного сопротивления проводников при их
механической деформации.
Характеристикой тензоэффекта материала является коэффициент
относительной тензочувствительности К, определяемой как отношение
изменение сопротивления материала к изменению суммы проводника:
К = ε
R
/ε
e
;
где: ε
R
=
R
R
- относительное сопротивление материала;
ε
e
=
- относительное изменение длины
Для жидких материалов, практически не меняющих своего объема при
деформации, коэффициент тензочувствительности К = 2.
Это следует из того, что сопротивление проводника при постоянном
объеме зависит от квадрата его длины:
VS
R
2
;
*2
V
R
;
2/
R
R
K
R
,
где: S – площадь поперечного сечения проводника;
V – объем проводника;
ρ – удельное сопротивление.
И для металлов изменение их длины связано с изменением их объема,
причем изменение объема в зоне упругой деформации характеризуется
коэффициентом Пуассона
е
в
;
где:
в
в
в
поперечная деформация.
В этом случае для металлов при
0,24-0,4; к = 1,48-1,8
Но практика показывает, что для металлов к>2, а для полупроводников
к ≈ 100. Значит, при деформации изменяется и ρ.
Зависимость R от относительной деформации E с достаточной
точностью описывается линейным двучленом
)(
0
КRR
где: R
0
– сопротивление без деформации;
К - тензочувствительность.
В технике измерений неэлектрических величин тензорезисторы
используются как для измерения объемного давления, тогда входной
величиной является давления, а выходной изменение активного
сопротивления: так и для измерения растяжения или сжатия, когда входной
величиной является перемещение, а выходной – измерение R.
Конструктивно тензорезистор реализован как тонкий длинный
проводник.
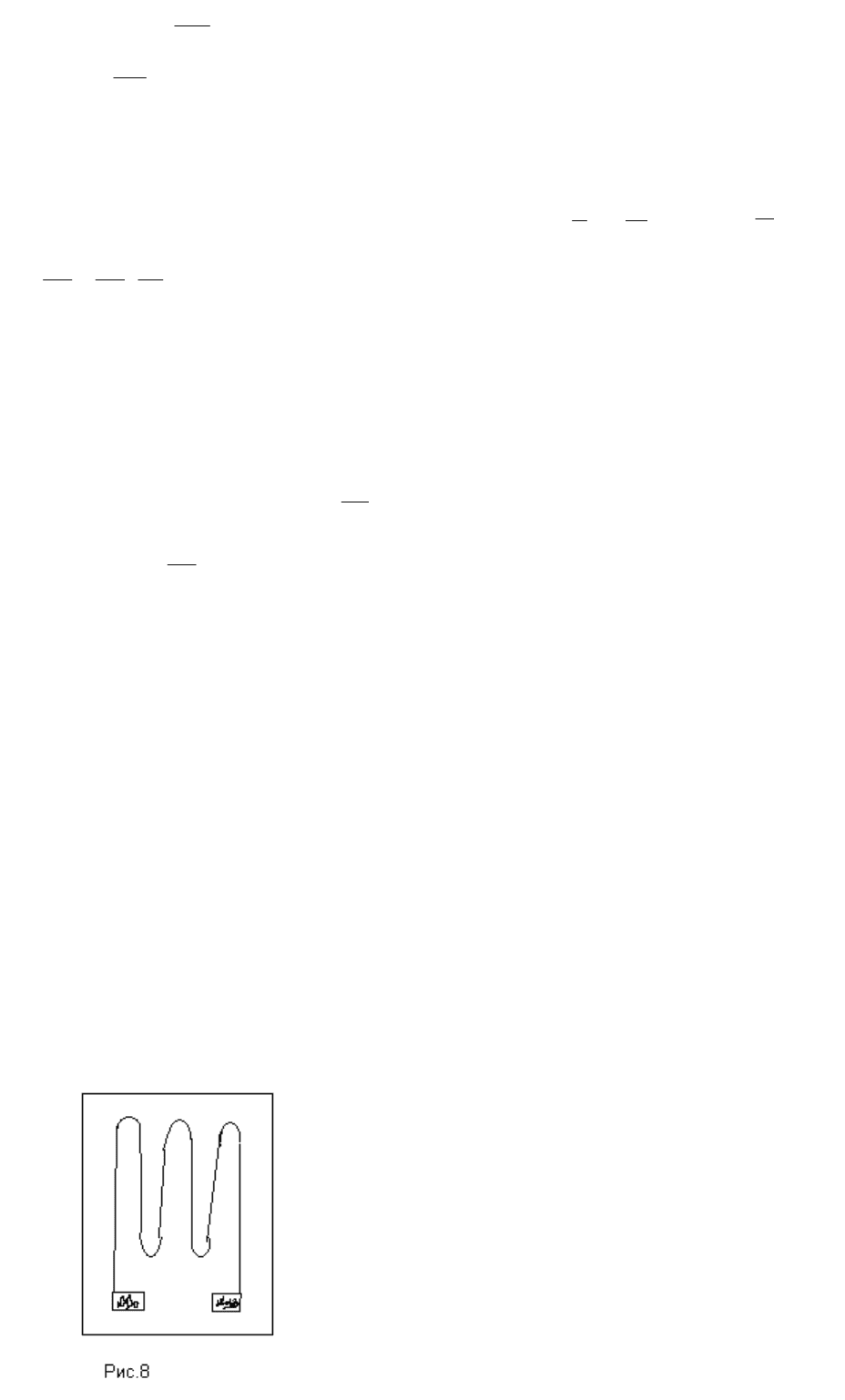
Фальговые тензорезисторы представляют
собой тонкую лаковую пленку, на которую
нанесена фальговая тензочувствительная
решетка толщиной 4-12 мам из константана.
Решетка сверху покрыта лаком. (Рис.8).
Проволочные имеют аналогичное устройство,
но его решетка выполнена из проволоки
диаметром 20 – 50мкм. Фальговые и проволочные тензорезисторы обычно
имеют длину 5-20 мм, ширину 3-10 мм. их номинальное сопротивление
равно 50,100,200,400,800 Ом.
Полупроводниковые тензорезисторы представляют собой пластину
монокристалла кремния или германия длиной 5 – 10 мм, шириной 0,2-0,8 мм.
К её торцам приварены выводы. Чувствительность К= 50 – 150. Их
существенный недостаток – зависимость R от температуры.
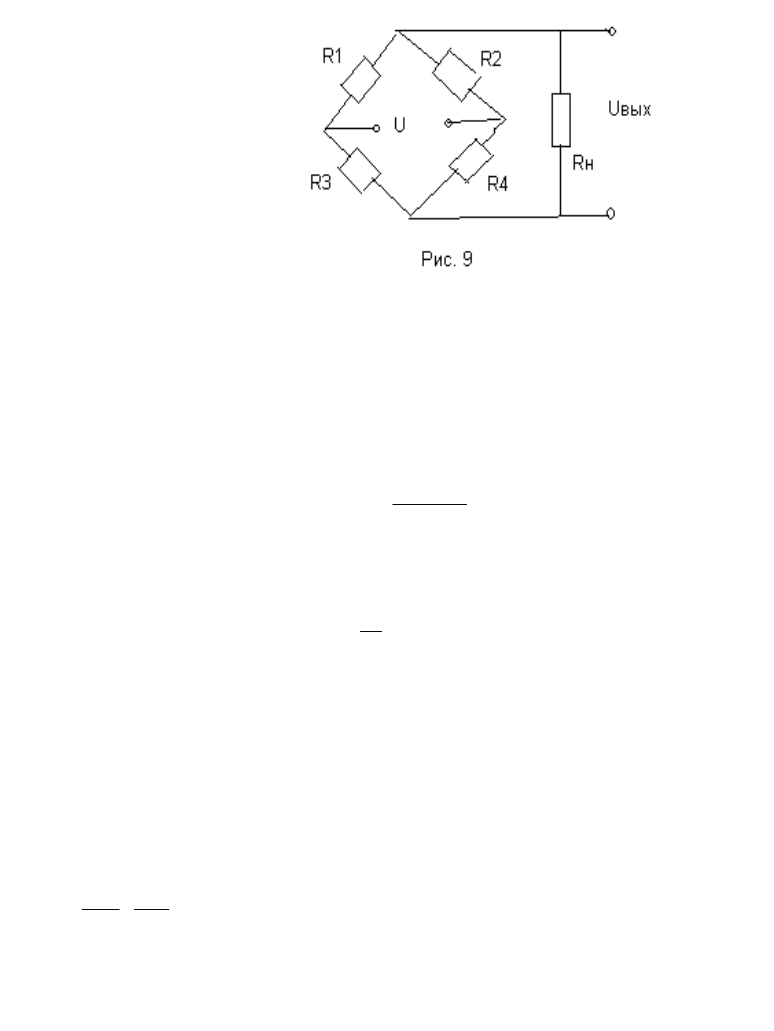
Наиболее часто тензорезисторы включаются в схему неравновесного
моста (Рис. 9).
Если сопротивление нагрузки Rн достаточно велико (режим хх), то
выходное напряжение моста.
))(/()()/()/(
43213241433211
RRRRRRRRURRURRRURUввы
,
где: U - напряжение питания. В качестве R
1
и R
2
включаются
одинаковые тензорезисторы. При отсутствии измеряемой деформации их
сопротивления равны: R
10
=R
20
=R
0
и если R
3
= R
4
, ε=0, U
вых
=0.
когда: ε ≠ 0, R
1
≠ R
2
,
)(2/
21
21
RR
RR
U
Uввы
Мостовая цепь является дифференциальной и при R
1
=R
0
+ ∆R и R
2
=
R
0
выходное напряжение цепи и чувствительность в режиме холостого хода
0
/URRUUввы
,
4
)//(
0
U
RRUввыSх
это схема первого рода.
При схеме второго рода, когда R
1
=R
0
+∆R и R
2
=R
0
-∆R, выходное
напряжение тензорезисторного моста не превышаем 10-20 мВ и для
дальнейшего преобразования требуется усиление.
Расчет тензорезисторов сводится к определению при выбранных их
размерах допускаемой мощности рассеяния. При перегреве расчет
погрешность. Нагрев Q тензорезистора по сравнению с температурой детали,
на которую он размещен, равен
у
о
S
Т
RQ
,
где: Rт – тепловое сопротивление, К/Вт;
Sо – площадь поверхности теплоотдачи резистора, м
2
;
- коэффициент теплоотдачи, Вт/(м
2
.К);
P у∂ - удельная тепловая нагрузка, Вт/м
2
.
Тензорезисторы рекомендуется накаливать на деталь, т.к. в этом случае
в деталь отводится в 200-300 больше тепловой энергии, чем при отдаче в
воздух.

Численные расчеты показывает, что при наклейке на металл P у∂ ≈ 50
мВт/мм
2
, а допустимое значение тока
мА
R
SоRу
опУ 205
Погрешность измерения может возникнуть как за счет схемы решений,
так за счет температурных изменений тензорезистора. При изменении
температуры оно изменяется как вследствие изменения удельного
сопротивления константана, так и вследствие изменения натяжения из-за
различных температурных коэффициентов удлинения тензорезистора и
детали.
Температурную погрешность частично можно уменьшить
применением компенсационных размеров, которые накаливаются поперек
детали и не воспринимают продольные деформации, а температура влияния
испытывают. В мостовых схемах их включают в смежные плечи с рабочим
тензорезистором.
§5. Емкостные преобразователи.
Емкостный преобразователь предоставляет собой конденсатор,
электрические параметры которого изменяются под действием входной
величин.
Конденсатор состоит из двух электродов, к которым подсоединены
выводные концы. Пространство между электродами заполняют
диэлектриком. При изменении взаимного положения электродов или при
изменении диэлектрической проницаемости среды межэлектродного
пространства изменяется ёмкость конденсатора.
Для плоского конденсатора ёмкость определяется выражением:
/SС
о
,
где: δ – расстояние между электродами;
S – их площадь;
ε
о
- электрическая постоянная;
ε – диэлектрическая проницаемость диэлектрика.
Изменение любого из этих параметров изменяет ёмкость
конденсатора.
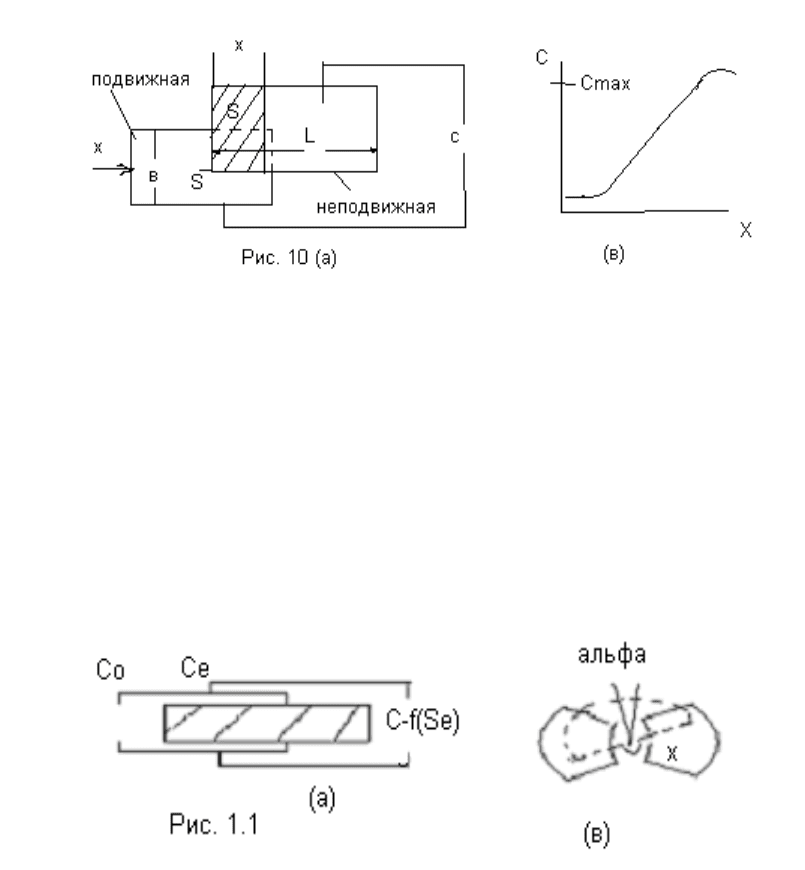
У преобразователя с прямоугольными электродами (Рис.10) S = bx и
имеется некоторый диапазон перемещения пластин Х
1
в котором ёмкость
линейно зависит от Х.
В области линейной зависимости чувствительность такого
преобразователя это чувствительность S
'
//
!
вdхdсS
о
постоянная и увеличивается с уменьшением δ.
Если изменяется δ функция преобразования C=f (δ) представляет собой
гиперболическую функцию. Чувствительность преобразователя
δ’=dC/dδ=εε
0
S/δ
2
.
Если перемещать диэлектрическую пластину в зазоре плоского
конденсатора (рис. 1.1), то можно получить преобразователь с переменной
диэлектрической проницаемостью.
Ёмкость такого преобразователя определяется как ёмкость двух
параллельно включенных конденсаторов. Функция преобразования
описывается выражением
C=Ce+Co=ε
o
[CS+S
ε
(ε-1)]/ δ , см. рис. 1.1
Емкостные преобразователи могут выполняться по
дифференциальной схеме (мостовой). Схема дифференциального
преобразователя углового перемещения α с переменной площадью
электродов приведена на рис. 1.1 (в). В таких преобразователях средний
подвижный электрод является общим для двух смежных плеч моста.
Емкостной преобразователь включается в измерительную цепь, при
этом изменение его ёмкости преобразуется в изменение напряжения или тока
либо в частоту, а входной величиной является перемещение линейное или
угловое.
Наиболее простой измерительной схемой является мостовая.
Номинальная ёмкость обычно лежит в пределах до сотен Пикофарад. На
частоте 50 Гц внутреннее сопротивление достигает до 10
7
Ом. Для
уменьшения таких сопротивлений частоту увеличивают до Мегагерц.
Погрешность емкостных преобразователей складывается из
температурных (температура) можем изменить размеры электродов), влияния
окружающих металлических предметов, емкостей измерительной цепи,
вибраций и др.
К достоинствам можно отнести простоту конструкции, малую массу
и размеры. Его подвижные электроды могут быть достаточно жёсткими, с
высокой собственной частотой, что дает возможность измерять
быстропеременные величины. Заданием конфигурации электродов можно
получить заданную функцию преобразования.[4]
§6 Индукционные преобразователи.
Индукционные преобразователи основаны на использовании
явления электромагнитной индукции. Согласно этому закону, ЭДС в контуре
определяется формулой е=-dФn/dt, где Ф – магнитный поток, n – число
витков контура.
Таким образом, выходной величиной является ЭДС, а входной –
скорость изменения потока.
В общем случае индукционный преобразователь представляет
собой катушку с сердечником или без сердечника, находящуюся в магнитном
поле. При изменении одного из параметров: катушки, сердечника,
магнитного поля; в катушке наводится ЭДС.
Для катушки без сердечников уравнения для преобразования
упрощаются и для основных видов преобразователей сводятся к следующим:
а) для неподвижной катушки в переменном магнитном поле
(В=В
m
cosωt)
e= ωnB
m
sinωt;
б) для катушки, вращающейся с частотой Ω в постоянном магнитном поле с
индукцией В
о
e=Ω nSB
o
sinωt,
где S- площадь катушки;
в) для контура, отдельные части которого линейно перемещаются в
магнитном поле В, изменяя площадь потока, сцепленная с катушкой,
e=-dФ∕dt=-nBв(dx/dt),
где в и x- размеры катушки, x изменяется, т.к. часть катушки выходит
из магнитного поля. dx/dt- линейная скорость перемещения или dα/dt-
угловая скорость относительно магнитного потока.
г) для отрезка длиной L, движущегося в однородном магнитном поле
со скоростью V так, что направления векторов L, B и V взаимно
перпендикулярны,
e=VBL.
Индукционные преобразователи являются генераторными
преобразователями и преобразуют механическую энергию в электрическую.
Различают ряд типов преобразователей.
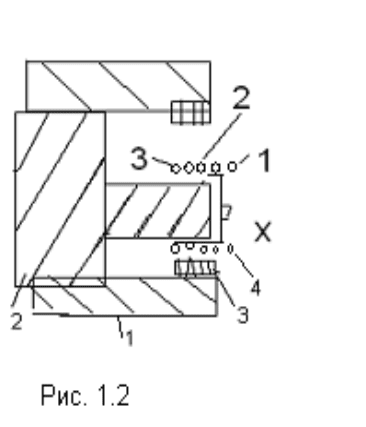
Преобразователь скорости вибрации (рис. 12)
Преобразователь имеет кольцевой магнит 1,
ярмо 2, магнитный поток замыкается через 2, 3 и воздушный зазор, в котором
находится катушка 4, которая может перемещаться по направлению Х.
Катушку можно условно разделить на три части Ι-ΙΙΙ. Ι – находится вне
магнитопровода, ΙΙ - находится в воздушном зазоре, где магнитный поток
постоянен. Часть ΙΙΙ находится вне воздушного зазора, но внутри магнитной
системы.
Магнитный поток здесь постоянен, но при вибрации изменяется число
витков, изменяется потокосцепление и наводится ЭДС, пропорциональная
скорости вибрации.
Тахометрические преобразователи. Примером их могут служить
электромашинные генераторы. Частота ЭДС их определяется соотношением
f=np/60,
где n- частота вращения;
p- число пар полюсов.
На принципе работы индукционных преобразователей построено и
ряд других датчиков: измерение числа импульсов, индукционные
расходомеры, измерители индукции магнитных полей.
Погрешности индукционных преобразователей в значительной
степени зависят от условий их работы (температура, внешние механические
вибрации, внешнее магнитное поле) и от режима работы. Наибольшая
погрешность возникает в режиме, при котором через нагрузку течет
значительный ток, т.е. при конечных значениях сопротивления нагрузки.
Наименьшая погрешность – в режиме холостого хода или когда нагрузкой
являются электронные устройства с большим входным сопротивлением.[4]
§7 Пьезоэлектрические преобразователи.
Пьезоэлектрическими называются кристаллы и текстуры,
электризующиеся под действием механических напряжений (прямой
пьезоэффект) и деформирующиеся в электрическом поле ( обратный
пьезоэффект ). Пьезоэффект обладает знакочувствительностью, т.е.
происходит изменение знаков заряда при замене сжатия растягиванием и
изменение знака деформации при изменении направления поля.
Пьезоэлектрическими свойствами обладают многие вещества: кварц,
турмалин, ниобат лития, сегнетова соль и др., а также специальные
пьезокерамики: титанат бария, титанат свинца, цирконат свинца и др.
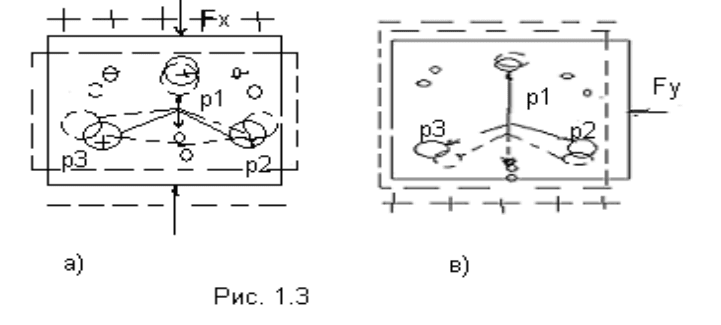
Физическую природу рассмотрим на примере кристалла кварца. На
рис. 1.3 показана форма элементарной ячейки кристаллической структуры
кварца.[5]
Ячейка в целом электрически нейтральна, однако в ней можно
выделить три направления,
проходящие через центр и соединяющие два разнополярных иона. Эти
направления называются электрическими осями и по ним направлены
векторы поляризации P
1
, P
2
, P
3
.
Если к кристаллу приложить силу F
x
, равномерно распределённую
по грани то в результате деформации ячейки её электрическая нейтральность
нарушится. Как показано на рис. 1.3 в деформированном состоянии ячейки
сумма проекций векторов P
2
и P
3
на ось X становится меньше (при сжатии)
или больше (при растяжении) вектора P
1
. В результате появляется
равнодействующая вектора поляризации. Ей соответствуют
поляризационные заряды на гранях, знаки которых показаны на рис. 1.3.
Образование поляризационных зарядов на гранях,
перпендикулярных оси X, при действии силы по оси X называется
продольным пъезоэффектом.
При механических напряжениях вдоль оси Y (её называют
механической осью) геометрическая сумма проекций векторов P
2
и P
3
на ось
Y равна нулю, и на гранях пъезоэлемента, перпендикулярных оси Y, заряды
не образуются. Но сумма проекций векторов P
2
и P
3
на ось X оказывается не
равной вектору P
1.
В результате на нижней грани образуются положительные
заряды, а на верхней – отрицательные. Этот механизм называется
поперечным пъезоэффектом. Поэтому при равномерном нагружении со всех
сторон кристалл кварца остается нейтральным. При нагружении по оси Z,
перпендикулярной оси X и Y, называемой оптической осью, кристалл
остаётся нейтральным. При механическом напряжении сдвига в отдельных
вариантах возможно образование зарядов.
При продольном пьезоэффекте на гранях, перпендикулярных оси X,
появляются заряды
q= d
11
Fx, где
d
11
– пьезоэлектрический модуль, равный 2,31*10
-12
К/н. (Кулон на
Ньютон),
d
11
- практически постоянен до температуры 200
0
_
С а затем с
увеличением температуры немного уменьшается.
Предельная рабочая температура составляет 500
0
С. При
температуре 573
0
С (температура Кюри) кварц теряет пьезоэлектрические
свойства. Диэлектрическая проницаемость ε кварца=4,5,удельное объёмное
сопротивление ~10
12
Ом.
При поперечном пьезоэффекте заряд может быть увеличен
соответствующим выбором длин ребёр x и y:
q=S
1
d
12
F
2
/S
2
d
12
S
1
=d
12
F
2
y/x
Область применения пьезоэлектрических преобразователей весьма
обширна.
1.Преобразователи,в которых используется прямой пьезоэффект,
применяются в приборах для измерения силы, давления, ускорения.
2.Преобразователи, где используется обратный пьезоэффект,
применяются в качестве излучателей ультразвуковых колебаний.
3.Преобразователи, в которых используются прямой и обратный
пъезоэффекты - пъезорезонаторы, применяются в качестве фильтров,
пропускающих очень узкую полосу частот на резонансной частоте.
Выходная мощность этих преобразователей очень мала, поэтому на
выходе преобразователя может быть включён усилитель с большим входным
сопротивлением.
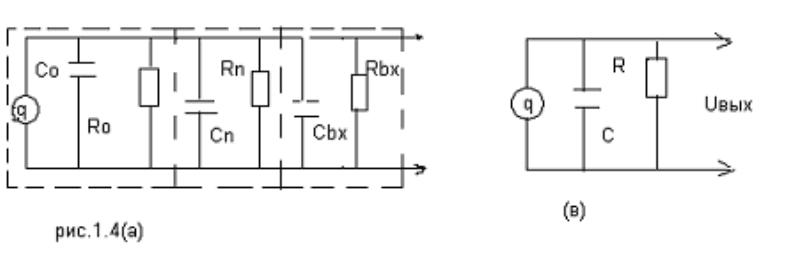
Эквивалентная схема преобразователя, соединённого кабелем с
измерительной цепью представлена на рисунке 14, на котором
C
o
-ёмкость между гранями пъезоэлемента;
C
n
-ёмкость кабеля между жилой и экраном;
C
bx
-входная ёмкость измерительной цепи;
R
o
-сопротивление преобразователя;
R
n
- сопротивление изоляции кабеля;
R
bx
-сопротивление измерительной цепи.
Эквивалентную схему мощность упростить(рис.14 в ),где
сопротивление R равно сопротивлению параллельно соединённых всех R и
ёмкость C=Co+Cn+bx..
При синусоидальной силе f=Fmsinωt/dt.Выходное сопротивление
преобразователя вместе с цепью составляет
Uвых=I[(R/jωc)/(R+1/(jωc))], где
I=jωd
11
F; тогда Uвых=d
11
FωR/(1+ωRC).
Как видно из последнего выражения, амплитуда напряжения и
сдвиг фаз зависят от частоты:
U вых = ( d
11
Fm/C)/ ( ωRC /√ (1+ω
2
R
2
C
2
)); φ=π/2+arctgωRC
Из приведенных выражений следует, что напряжение на выходе не
будет зависеть от частоты только при высоких частотах ω>1/RC и будет
равно U
вых
=d
11
F/C, т.е Uвых
зависит от ёмкости. Поэтому ,если включить парвллельно
преобразователю ёмкость можно расширять частотный диапазон, но
уменьшить Uвых. Увеличить R технически сложнее, т.к. оно и так велико,
порядка 10
9
÷10
10
Ом .
Достоинствами пьезоэлектрических преобразователей являются
малые габариты, простота конструкции, надёжность в работе, широкий
частотный диапазон, высокая точность преобразования механических
величин в электрические. Эти достоинства и позволяют использовать
пьезодатчики для датчиков давлений, ускорений, сил, а обратный эффект -
для создания генераторов ультразвуковых колебаний.
ГЛАВА ΙΙ.