Лобанов А.Н. Фотограмметрия
Подождите немного. Документ загружается.

Найдем частные производные (16.11)
'г -/
Эф
ь =
Эт'
Эф
дх'
XО
зес
2
т' —
к;
СОЗ
2
X'
81ПТ ;
У1
У о
зес
2
V'
созт'
Теперь вычислим
ЭФ
X
ЭДа
дУ
0
У1
1
соз х'
-г
Уг
дХ
0
ЭДа
Э2,
+
&
2?2 - Ч\
ЭДа ' л:, уг ЭДа
Согласно (9.6) и (9.8)
х
2
+ а
2
г/
2
- а
3
/; У
2
2
= СуХ
2
+ С
2
У
2
а, = соз Да соз Дх
—
зт Да зт
Дсо
зт Дт;
а
2
=
—
соз Да зт Дх
—
зт Да зт
Дсо
соз Дх;
а
3
=
—
зт Да соз Дсо;
Ь
±
= соз
Дсо
зт Дх;
Ь
2
—
соз
Дсо
соз Дх;
Ь
3
=
•
зт Дсо;
Сг
= зт Да соз Дх 4- соз Да зт
Дсо
зт Дх;
с
2
=
—
зт Да зт Дх -р соз Да зт
Дсо
соз Дх;
с
3
= соз Да соз Дсо.
Отсюда
дХ
2
ЭДа
да
г
ЭДа
да
2
ЭДа
да
3
ЭДа
да.
+ 2/2
да
2
-1
да
3
соз т'
-г
X
ЭДа ЭДа ЭДа
•
зт Да соз Дх
—
соз Да зт
Дсо
зт Дх =
—
с
х
;
= зт Да зт Дх
—
соз Да зт
Дсо
соз Дх =
=
—
соз Да
соз
Дсо = — с
3
.
с
2
\
270
(10.14)

Итак,
дх'
дДа
Далее
• дУ'
= —
(
+
с
2^2 —
с
з0 = —
2
2
'
дДа
дс-1
дДа
дс
2
дДа
дс
я
••о,
дг
2 _ дс! , дс
2
дс
3
—
х
г У2 .
— /
дДа ' дДа ' "" дДа ' дДа
соз Да соз Дх
—
зш Да зт Дш зт Дх = а
х
;
=
—
соз Да зт Дх
—
зт Да зт Дш соз Дх = а
2
;
дг'
дДа
Таким образом,
зт Да соз Дм = а
3
,
дДа
= а,х
2
+ а
2
(/
2
-а
3
/=
V'
1
1§т
1
с = —
соз х'
2
2
1
Ч У1
У1
х
2
.
Аналогично вычислим остальные две производные. В резуль-
тате будем иметь
а — — (Х)2
2
+ /Х
2
) зес
2
т — \х
х
У
2
— у
г
Х
2
соз
2
т'
ь
= (^-У^г)
•
соз т'
( ' V \ ,
й
—
— т +
{/[
^
У
- ^ [а
3
(х
2
зт Дх + у
2
соз Дх) —
—
/ зт Да зт
Дш ]
+ Г/ 4
х
\ —^Т
-
! [^з (
х
2
5
'
п
\
СОЗ X
/
-г
СОЗ
Дх] + /
СОЗ
Дш] +
( (/[ — -V,
X ) [с
3
[х
2
31П
Дх +
-- у
2
соз Дх) + / соз Да зт Дш];
V
(16.15)
\ СОЗТ /
(а
2
у
2
— а
2
х
2
) -
С V' \
— / + Ч г (
6
1
У*
— —
(У1
—
Х
1
х
') X
\ соз т )
X
(СуУг
— с
2
х
2
).
271
Эти коэффициенты, как и свободный член I уравнения поправок,
вычисляются по приближенным значениям элементов взаимного
ориентирования.
Если снимки плановые, то в первом приближении можно счи-
тать, что элементы взаимного ориентирования равны нулю, т. е.
при вычислении коэффициентов (16.15) полагать Х
2
= х
г
, У
2
=</
2
»
Т
2
— — /, т' = V' = 0. Тогда
а = }[х
1
—х
2
)=1р\ ь = у
{
р
;
с = «/
1
*
2
; а = (
2
+
у
2
^
е = {х
2>
а свободный член согласно (16.13)
= —НУ1—Уг) = — М-
Подставим эти значения коэффициентов и свободного члена
в уравнение (16.12) и заменим неизвестные 6т', д\', 8Аа, 6Асо,
6Ах на т', V', Аа, А©, Ах. В результате получим уравнение взаим-
ного ориентирования пары плановых снимков
рг' РУ' + у*
2
Ла + (/ + Л© + *Ди-<7 -=0. (16.16)
Это уравнение можно составить и другим путем, используя за-
висимость между координатами соответственных точек на горизон-
тальном и плановом снимках. Известно, что поперечный параллакс
на горизонтальных снимках, полученных с одной высоты, равен
нулю. Согласно выражению (9.29) и учитывая, что для левого
снимка а = со = х = 0, напишем
1 0
0
1 =
У\
Уг
У\ = Ух\
П ( у\ .
у2 = у2 —
Да
+1 / + )
Асо
+
х
2
Ан
+'
где 6у — поправка за смещения У
0
и 2
0
центра проекции 5
а
(см.
рис. 191). Из формул (14.4) следует
2/1
= У — = - У 4г>
в г
отсюда
г ^о I и. ^ц , Уг
Ьу
-==••
— Р + У! — « рт' + у- рт'.
Подставив значения у® и в выражение (16.9) получим урав-
нение (16.16).
272
§ 108. Определение элементов взаимного ориентирования
(а\, а
2
, (о'
2
, к
2
).
Для определения элементов взаимного ориентирования снимков
используют уравнения, полученные в предыдущем параграфе. Сна-
чала измеряют координаты не менее пяти точек стереопары, а затем
составляют и решают систему уравнений взаимного ориентирова-
ния. Если число точек больше пяти, то уравнения решают по спо-
собу наименьших квадратов.
Пусть измерены координаты п точек стереопары и требуется
найти элементы взаимного ориентирования а\, а'
2
, 01
2
, х
2
.
Предполагая, что приближенные значения этих элементов из-
вестны (начальное приближение), составим по формуле (16.5) урав-
нения поправок
а
1
ба
1
+ 6[ба
2
+ с
1
бсо
2
+ е
{
&к
2
+
1у
= о,;
а
2
ба
1
+ &
2
6а
2
+ с
2
6ш
2
+ й
2
бх[
—
е
2
6х
2
+
1
2
=
V
2
•
>
а
я
ба
1 +
ь
п
8а
2
+
С
«
бш
2
+
а
п
6х
1 +
2
+
1
П
= °П.
(16.17)
Коэффициенты а;, с
(
-, йс, е,- и свободные члены /
(
- этих урав-
нений вычислим по формулам (16.6) и (16.4), используя измеренные
координаты точек стереопары и приближенные значения элементов
взаимного ориентирования.
Запишем уравнения (16.17) в матричной форме
АХ + Ь = К,
(16.18)
где
а,
С
1
1
Л =
а
2
с
2
й
2
8а,
6а,
6х,
8х„
1.=
" к ~
к
«2
; у =
_ /„ _
«п -
(16.19)
Далее составим систему нормальных уравнений пятого порядка
ВХ + С = о. (16.20)
Здесь
В = А'РА и С = А' РЬ, (16.21)
273
где А' — транспонированная'матрица, а Р — матрица весов,
Рх о ООО
О р
2
о о о
(16.22)
О ООО р
п
В результате решения нормальных уравнений получим поп-
равки к начальному приближению неизвестных и, введя их, най-
дем первое приближение элементов взаимного ориентирования.
Затем, используя уточненные значения определяемых величин,
вновь составим уравнения поправок, нормальные уравнения, ре-
шим их и получим поправки к первому приближению. После вве-
дения этих поправок найдем второе приближение неизвестных.
Так следует действовать до тех пор, пока поправки не будут на-
столько малы, что ими можно пренебречь.
В качестве критерия точности определения элементов взаимного
ориентирования можно использовать поправки V или остаточные
поперечные параллаксы
=•• ?? - (
16
-
23
>
вычисляемые в конце каждого приближения для всех точек, по ко-
торым находятся неизвестные. В формуле (16.23) у\ и у° — транс-
формированные ординаты соответственных точек левого и правого
снимков. Они вычисляются по формуле (9.27). При этом в качестве
направляющих косинусов берутся значения их, полученные по
формуле (9.8) в процессе составления уравнений поправок: для ле-
вого снимка по углам а!, со! = 0 и щ, а для правого — по углам
а
2
, а'
2
и к
2
.
Если поправка V или остаточный поперечный параллакс 8
<7
на
любой точке не выходит за пределы допустимой ошибки измерения
координат точек стереопары, то нет необходимости переходить к
следующему приближению.
Испытания изложенного выше способа, выполненные по макет-
ным снимкам и аэроснимкам, показали, что он позволяет опреде-
лять элементы взаимного ориентирования перспективных и плано-
вых снимков с высокой точностью в результате двух-трех прибли-
жений.
В табл. 14 приведены значения элементов взаимного ориентиро-
вания пары макетных перспективных снимков холмистой местно-
сти, полученные этим способом при помощи электронной вычисли-
тельной машины. Элементы найдены по девяти точкам, равномерно
расположенным в пределах стереопары. Начальные значения не-
известных отличались от действительных на величины, не превы-
шающие 3°.
Величины элементов взаимного ориентирования, полученные
в третьем приближении, точно совпали с действительными их зна-
чениями, выбранными при расчете макетных снимков. Остаточные
поперечные параллаксы 8(7 после первого приближения достигали
274

Таблица 14
V
V
X
Элементы взаимного ориентирования
Остаточ-
ные
попереч-
ные па-
раллаксы
^
о
д.
С
а
2
со
2
«2
б
?тах,
мкм
1-е
2-е
3-е
0° 52' 25"
0 59 56
1 00 00
— 1° 55' 42"
— 1 59 57
—2 00 00
—3° 07' 38"
—2 59 59
—3 00 00
22° 0Г 46"
22 00 21
22 00 00
1° 03' 03"
0 59 52
1 00 00
29,5
7,6
0,1
29,5 мкм, после второго — не превышали 7,6 мкм, а после третьего—
0,1 мкм.
В результате испытаний также установлено, что уклонения на-
чальных величин элементов взаимного ориентирования, достигаю-
щие 10°, вызывают увеличение числа приближений до пяти. Если
же эти уклонения доходят до 20°, то число приближений возрастает
до восьми. При этом точность способа не снижается.
Избыточное количество точек позволяет повысить точность оп-
ределения элементов взаимного ориентирования. Если число то-
чек увеличивается с 6 до 12, то точность определения элементов
возрастает приблизительно на 50 %. Дальнейшее увеличение числа
точек дает небольшое повышение точности определения элементов,
но значительно увеличивает объем работ по измерению снимков.
Поэтому можно считать, что оптимальное количество точек для
решения задачи взаимного ориентирования снимков не должно
превышать 12.
Рассмотренный выше способ является строгим и пригоден для
определения элементов взаимного ориентирования любых сним-
ков. В случае плановой аэрофотосъемки, когда углы а, со и я малы,
для определения элементов взаимного ориентирования снимков
можно использовать приближенное уравнение (16.8).
Для этого на паре плановых снимков выберем шесть точек так,
чтобы обеспечить возможно высокую точность определения элемен-
тов и наиболее простой вид уравнений.
Пусть все элементы взаимного ориентирования, за исключением
одного, например к'
2>
равны нулю. Тогда уравнение (16.8) примет
вид
Х
2
Х
2 — 9 = 0
>
отсюда
х
2
= <?/л;
2>
Ошибка определения элементов взаимного ориентирования сним-
ков зависит главным образом от ошибки измерения поперечных
275
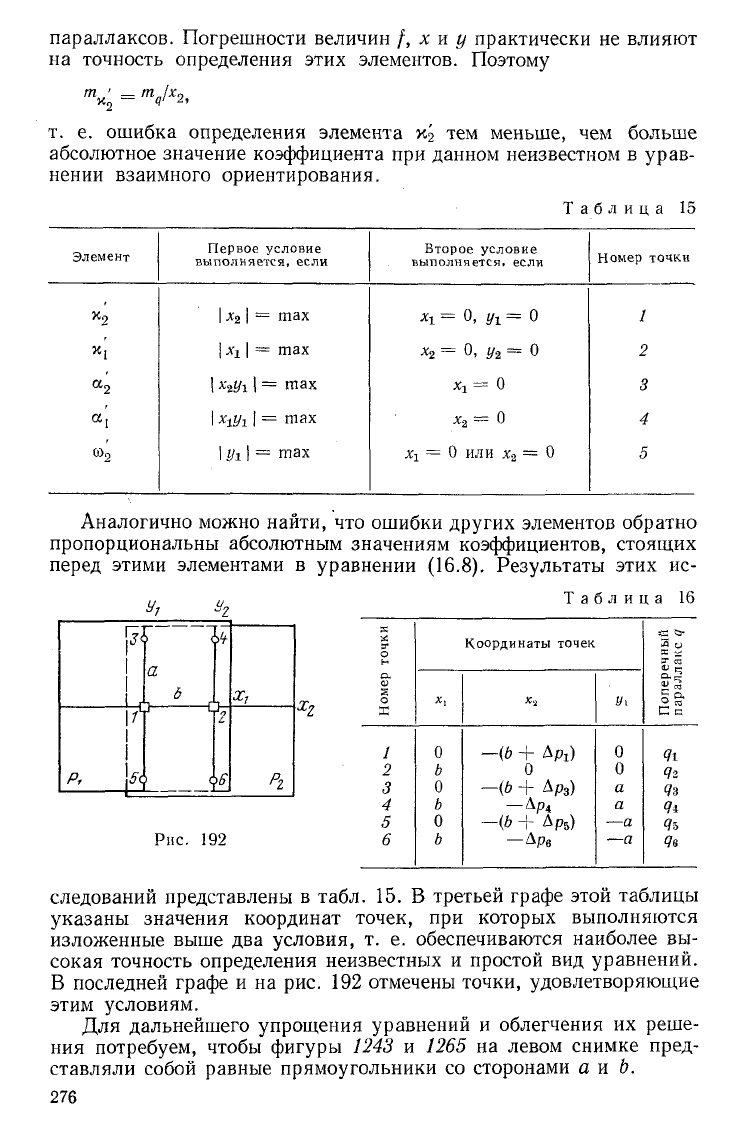
параллаксов. Погрешности величин /, х и у практически не влияют
на точность определения этих элементов. Поэтому
т
я
2
=
т. е. ошибка определения элемента тем меньше, чем больше
абсолютное значение коэффициента при данном неизвестном в урав-
нении взаимного ориентирования.
Таблица 15
Элемент
Первое условие
выполняется, если
Второе условие
выполняется, если
Номер точки
х
2
1
х
2
| = тах
= 0, у
г
= 0
1
X,
| х
г
| = тах
х
2
= 0, у
2
= 0
2
а
2
!
ЧУ\
1
= тах
х
г
= 0
3
а,
1
НУг
1
= тах
х
2
= 0
4
ю
2
| у
х
| = тах
XI = 0 или х
2
= 0 5
Аналогично можно найти, что ошибки других элементов обратно
пропорциональны абсолютным значениям коэффициентов, стоящих
перед этими элементами в уравнении (16.8). Результаты этих ис-
У1 У?
Таблица 16
а
р,
й-
^
х,
х?
Рис. 192
X
V
Координаты точек
2 о
О
Н
Координаты точек
В" го
а.
<" го
2
о х,
У 1
5»
X С
С
1
0
-(Ь + Лй)
0
<71
2 Ь
0
0
<72
3
0
—(ь + Дрз)
а
Яз
4
Ь
— Др
4
а
<?4
5
0
~(Ь + Лр
5
)
—а
6
ь
—Дрв
—а
<7в
следований представлены в табл. 15. В третьей графе этой таблицы
указаны значения координат точек, при которых выполняются
изложенные выше два условия, т. е. обеспечиваются наиболее вы-
сокая точность определения неизвестных и простой вид уравнений.
В последней графе и на рис. 192 отмечены точки, удовлетворяющие
этим условиям.
Для дальнейшего упрощения уравнений и облегчения их реше-
ния потребуем, чтобы фигуры 1243 и 1265 на левом снимке пред-
ставляли собой равные прямоугольники со сторонами а и Ь.
276
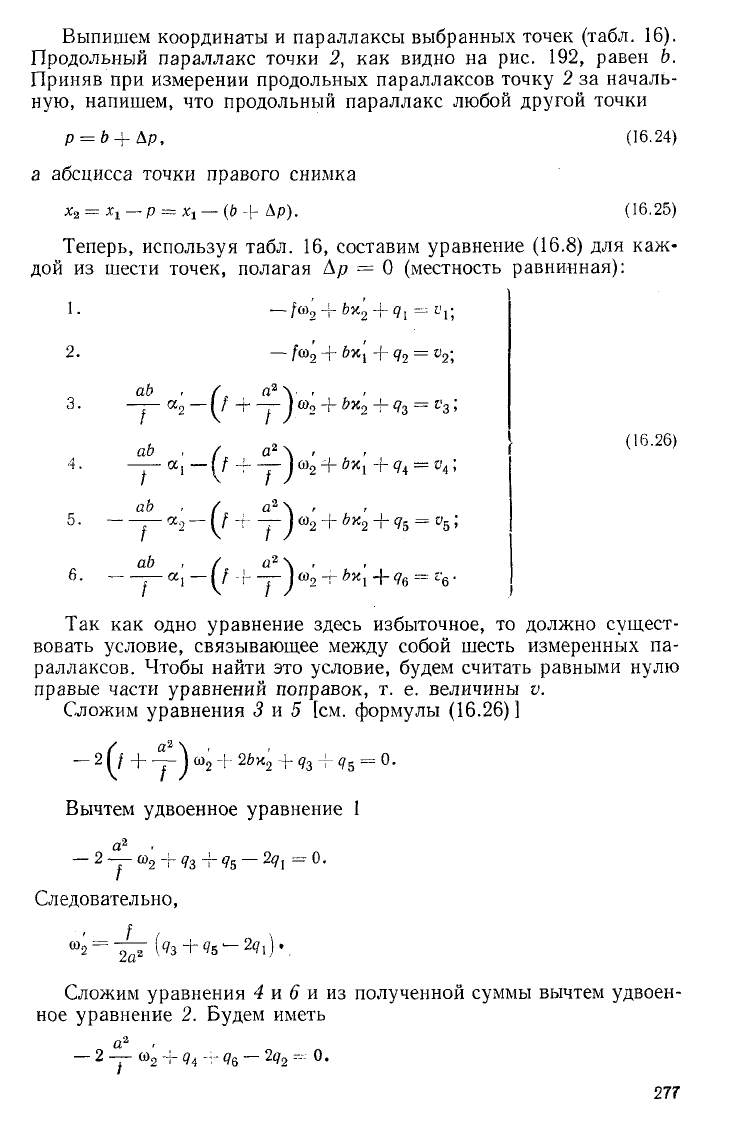
Выпишем координаты и параллаксы выбранных точек (табл. 16).
Продольный параллакс точки 2, как видно на рис. 192, равен Ь.
Приняв при измерении продольных параллаксов точку 2 за началь-
ную, напишем, что продольный параллакс любой другой точки
р = Ь + Ар,
а абсцисса точки правого снимка
=
Х
1 —
Р
~ — (Ь -Н Ар).
(16.24)
(16.25)
Теперь, используя табл. 16, составим уравнение (16.8) для каж-
дой из шести точек, полагая Ар = О (местность равнинная):
1.
2.
3.
— /со, -
-К
аЬ
т
аЬ
Ьх.
2
4-
==
с'ц
Ьх[ 4
<?2
= Н
Ьх2 4-
<?з
= с
3
;
6.
аЬ , / а
2
\ ,
— а, — 4 у ^
ш
2
+ ^ 4
<?
4
= :
аЬ , ( а
2
\ ,
—
«2
-
-Г"
у ^
Ш
2
+ + =
"б
;
'1 —
(/
"Г
у)
®2 "Г
^ + =
Е'
6
•
/
(16.26)
Так как одно уравнение здесь избыточное, то должно сущест-
вовать условие, связывающее между собой шесть измеренных па-
раллаксов. Чтобы найти это условие, будем считать равными нулю
правые части уравнений поправок, т. е. величины V.
Сложим уравнения 3 и 5 [см. формулы (16.26)]
Вычтем удвоенное уравнение 1
—
2
у
®2 "Г <?3
+
%
~
2
Я\ =
Следовательно,
!
2 а
2
93
+
95 —
2
"?!
Сложим уравнения 4 и 6 и из полученной суммы вычтем удвоен-
ное уравнение 2. Будем иметь
-
2
—
И
2 + Я
А
-г
<?
6
—
2(
?2
277
Отсюда
'/в" Ч.
1
2 а
2
Сопоставляя два выражения, найденные для определения эле-
мента «г, напишем
<?3
+
<?5 — 2?!
=
<74
+
9в — 2?2
или
2<?1—2<?а —+ + = 0. (16.27)
Уравнение (16.27) выражает условие, связывающее поперечные
параллаксы на стандартно расположенных точках плановых сним-
ков равнинной местности.
Если бы измерения поперечных параллаксов были безошибочны,
то правая часть этого уравнения действительно была бы равна
нулю. Но вследствие ошибок измерений в правой части будет не
нуль, а невязка до. Таким образом, при невязке
2?!
— 2<7
2
— <7з
+
<?
4
+ + д
в
=
ш
(16.28)
условное уравнение поперечных параллаксов будет
2
Ух — 2О
2
— г;
3
+
—1-5
+ +
ш
= 0.
Уравненные поперечные параллаксы найдем методом коррелат,
известным из способа наименьших квадратов. В данном случае
коррелата
к=
—
ш/12,
а поправки к измеренным параллаксам
у
1=
_®/6; у
3
= щ)/12; и
5
= ву/12;] )
} (16.29)
у
2
= ш/6; у
4
= —ш/12; у
в
= —ш/12. )
Придав эти поправки к измеренным параллаксам, получим урав-
ненные параллаксы.
Учитывая, что элемент сог найден, определим и остальные че-
тыре элемента, используя уравнения поправок (16.26).
Вычтем из уравнения 4 [см. формулы (16.26) ] уравнение 6
2-у
«1
+
^4
—?б =
0
- О/б-^)-
Из уравнения 3 вычтем уравнение 5
2у-«2 + '?3-?5 =
0
-
°°2
= ~^
(<?5
-
<?3>
Из уравнений 1 я 2 следует
х,'= ———; = —со1—
1
&
2
Ь
2
Ь
2
Ь
278
При вычислении неизвестных по полученным выше формулам
необходимо в измеренные параллаксы ввести поправки (16.29).
Учитывая это, окончательно найдем
(16.30)
Для оценки точности определения элементов взаимного ориен-
тирования вычислим [и
2
]. Как следует из равенств (16.29),
[о
2
] == т
2
/\2,
отсюда ошибка единицы веса
Имеется только одно избыточное измерение, поэтому ошибка
единицы веса получается неуверенно. Для нее следует взять не-
которое среднее значение из полученных при определении элемен-
тов взаимного ориентирования нескольких пар, представляющих
собой более или менее однородный материал.
Теперь подсчитаем средние квадрэтические ошибки определе-
ния элементов взаимного ориентирования, используя для этого
формулы (16.30). Получим
Отсюда следует, что при одинаковой ошибке т
ч
элементы вза-
имного ориентирования снимков, полученных короткофокусными
фотокамерами, находятся с большей точностью, чем элементы сним-
ков, полученных длиннофокусными фотоаппаратами. При данном
значении фокусного расстояния фотоаппарата ошибки элементов
будут тем меньше, чем величины а и Ъ будут больше (см. рис. 192).
Поэтому точки 3, 4, 5, 6 надо выбирать по возможности дальше от
начального направления. Однако расстояние от этих точек до краев
снимка должно быть не меньше 2 см, так как при меньшем расстоя-
нии не всегда можно выдержать стандартное расположение точек
вследствие углов поворота снимков. Кроме того, по мере прибли-
жения к краям снимков снижается точность измерения, поскольку
качество изображения в этих местах хуже, чем в центральной части.
В табл. 17 представлены ошибки определения элементов взаим-
ного ориентирования, вычисленные по формулам (16.32) для раз-
ц = у [V
2
] = т/2 V3 .
(16.31)
т ,
А,
(16.32)
279