Middleton W.M. (ed.) Reference Data for Engineers: Radio, Electronics, Computer and Communications
Подождите немного. Документ загружается.

47-30
REFERENCE
DATA
FOR ENGINEERS
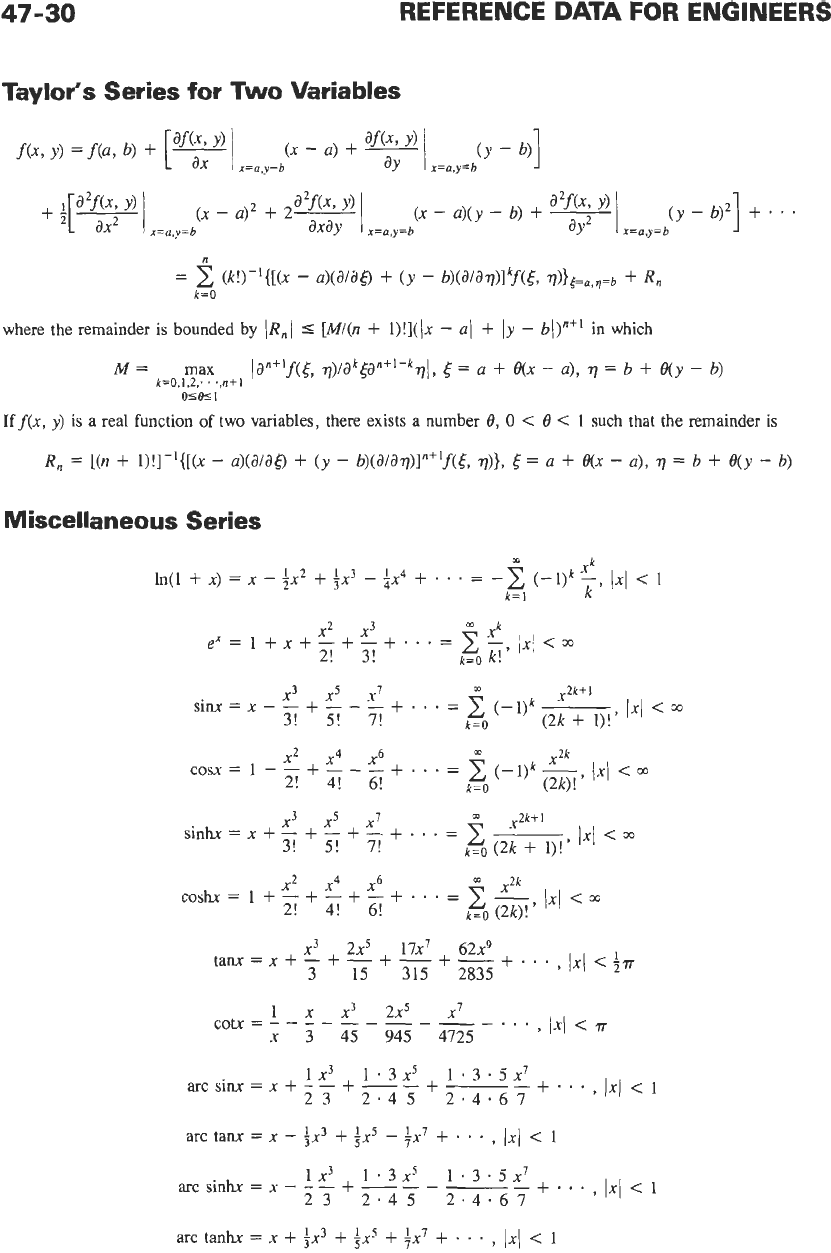
Taylor‘s Series for
Two
Variables
n
k=O
=
C,
(w-I{[(x
-
awao
+
(Y
-
b)(a/a~)i”f(t,
V))t=a,q=b
+
Rn
where the remainder is bounded
by
/Rnl
5
[M/(n
+
l)!]((x
-
a/
+
Iy
-
bont1
in which
M
=
max
lan+lf(&,
V)/aktantl-kv(,
8
=
a
+
-
a),
77
=
b
+
B(y
-
b)
k=0,1,2;
.,ntI
oce5-l
Iff(x,
y)
is a real function of two variables, there exists a number
8,
0
<
0
<
1
such that the remainder is
R,
=
[(n
+
i)!]--l([(x
-
a)(a/a&
+
(y
-
b)(a/a~)]~+If(t,
VI},
5
=
+
B(X
-
u),
71
=
b
+
e(y
-
b)
Miscellaneous Series
m
x3
x5
x7
sinx=x--+---+.
.
.
=
x2
x4
x6
x3
x5
x7
1x1
<
3! 5! 7!
k=O
m
cosx
=
1
-
-
+
-
-
-
+
.
.
.
=
2! 4! 6!
k=O
9
1x1
<
cC
sinb=x+-+-+-+.n.=
3! 5!
7!
k=O
(2k
f
I)!
.=
x4
x6
X2k
2! 4! 6!
k=O
(2k).
coshx
=
1
+
-
+
-
+
-
+
.
.
*
=
y,/xI
<
m
x3 2x5 17x7 62x9
3
15
315 2835
tanx
=
x
+
-
+
-
+
-
+
-
+
*.
.
,
1x1
<
trr
1
x
x3 2x5 x7
cotx
=
-
-
-
-
-
-
-
-
-
-
.
.
*
x
3 45
945
4725
,
1x1
<
iX3
1.3~5 1’3.5~7
acsim=x+
--+--+--+...
,
1x1
<
1
arc tanx
=
x
-
5.’
+
fx’
-
3.’
+ *
-
.
,
1x1
<
1
23 2.45 2‘4.67
1x3 1.3x5 1.3.5x7
,
1x1
<
1
arc sink
=
x
-
-
-
+
-
-
-
___
-
+
. .
.
23 2.45 2‘4.67
arc tanhx
=
x
+
fx3
+
ix’
+
fx’
+
.
.
.
3
1x1
<
1
MATHEMATICAL EQUATIONS
MATRIX ALGEBRA
47-31
C
=
AB
will have elements
cij
=
2
ajk
bkj, i
=
1,
2,
*
.
.,
rn;
j
=
1, 2,
-
*
.,
p
n
k=
I
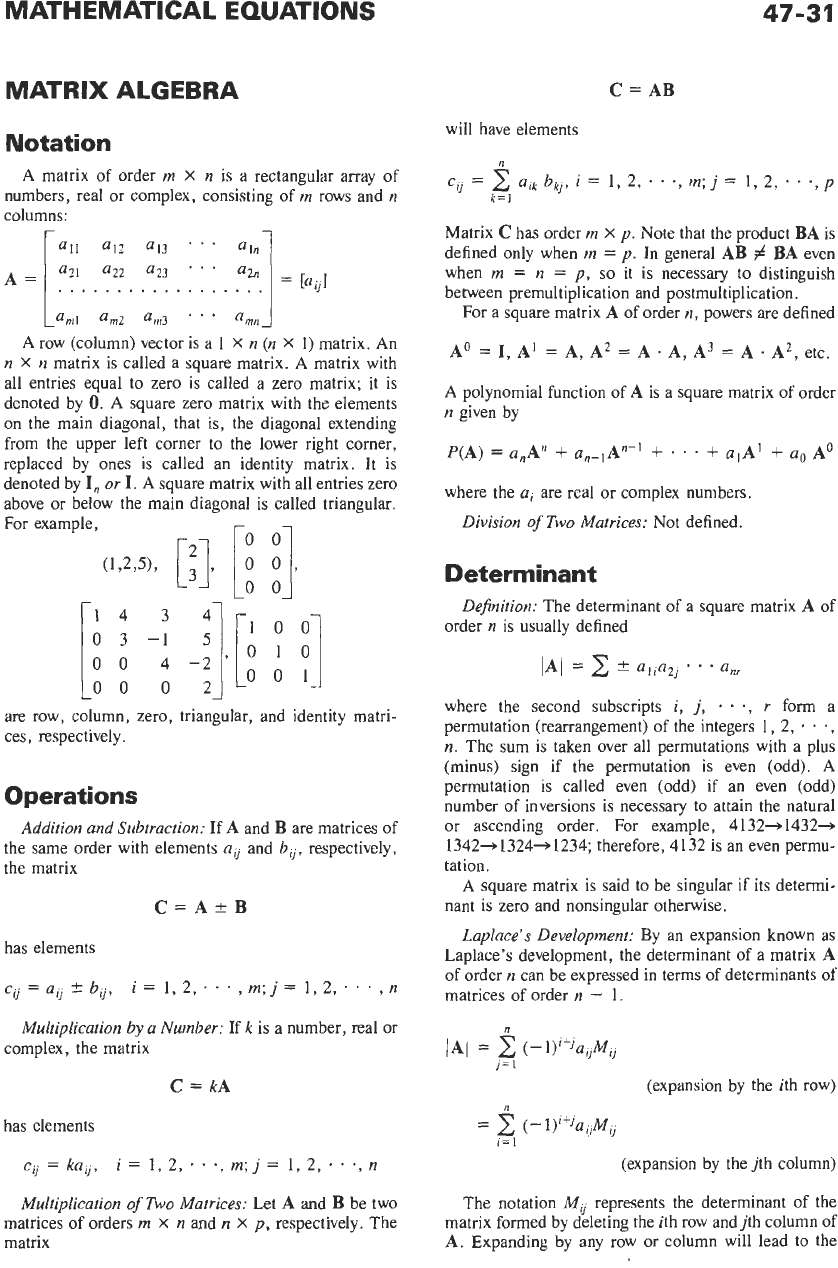
Notation
A
matrix of order
rn
X
n
is a rectangular array of
numbers, real or complex, consisting of
m
rows and
n
columns:
=
[aijl
all
a12
a13
'
'
*
a21
a22
%3
'
*
'
A
row (column) vector is a 1
X
n
(n
X
1) matrix. An
n
X
n
matrix is called a square matrix.
A
matrix with
all entries equal to zero is called a zero matrix; it is
denoted by
0.
A square zero matrix with the elements
on the main diagonal, that is, the diagonal extending
from the upper left corner to the lower right corner,
replaced by ones is called an identity matrix. It is
denoted by
I,
or
I.
A
square matrix with
all
entries zero
above or below the main diagonal is called triangular.
For example,
(123,
[:I,
[!
%].
r"
00
-;
-;],[;
001
;
"I
are row, column, zero, triangular, and identity matri-
ces, respectively.
Operations
Addition and Subtraction:
If
A
and
B
are matrices of
the same order with elements
aij
and
bV,
respectively,
the matrix
C=ArB
has elements
c..
ll
=
a,.
ll
-
f
b..
i
=
1, 2,
'
.
*
,
rn;
j
=
1,2,
*
.
,
n
Multiplication
by
a
Number:
If
k
is a number, real or
complex, the matrix
C
=
kA
has elements
cij
=
kajj,
Multiplication
of
Two
Matrices:
Let
A
and
€3
be two
matrices of orders
m
X
n
and
n
X
p,
respectively. The
matrix
i
=
1, 2,
. .
.,
rn;
j
=
1, 2,
.
.,
n
Matrix
C
has order
rn
X
p.
Note that the product
BA
is
defined only when
m
=
p.
In general
AB
#
BA
even
when
rn
=
n
=
p,
so
it is necessary to distinguish
between premultiplication and postmultiplication.
For a square matrix
A
of order
n,
powers are defined
A'
=
I,
A'
=
A,
A2
=
A
.
A,
A3
=
A.
A2,
etc.
A
polynomial function of
A
is a square matrix of order
n
given by
P(A)
=
anAn
+
an-lAn-'
+
*
.
.
+
alA'
'i
a0
A'
where the
ai
are real or complex numbers.
Division
of
Two
Matrices:
Not defined.
Determinant
Definition:
The determinant of a square matrix
A
of
order
n
is usually defined
where the second subscripts
i,
j,
.,
r
form a
permutation (rearrangement) of the integers 1, 2,
*
*
a,
n.
The sum is taken over all permutations with a plus
(minus) sign if the permutation is even (odd).
A
permutation is called even (odd) if an even (odd)
number
of
inversions
is
necessary to attain the natural
or ascending order. For example, 4132+1432+
134241324-1234; therefore, 4132 is an even permu-
tation.
A
square matrix is said to be singular if its determi-
nant is zero and nonsingular otherwise.
Laplace's Development:
By an expansion known as
Laplace's development, the determinant of a matrix
A
of order
n
can be expressed in terms of determinants of
matrices of order
n
-
1.
(expansion by the ith row)
(expansion by the jth column)
The notation
Mij
represents the determinant of the
matrix formed by deleting the ith row and jth column of
A.
Expanding by any row or column will lead to the
47-32
REFERENCE
DATA
FOR ENGINEERS
same value of
[AI.
The
Mij
are in turn evaluated in
terms of determinants of order
n
-
2.
This process is
continued until, say, second-order determinants are
obtained.
A first-order determinant has a value equal to its only
entry.
Mii
is called the minor and
(-
l)itj
X
M..
11
=
A-
11
is
called the cofactor
of
the element
aii.
Laplace's development is valuable for a literal expan-
sion. For numerical evaluation
of
determinants of large
order, say greater than four, the Gauss algorithm
described in the next subsection requires less effort.
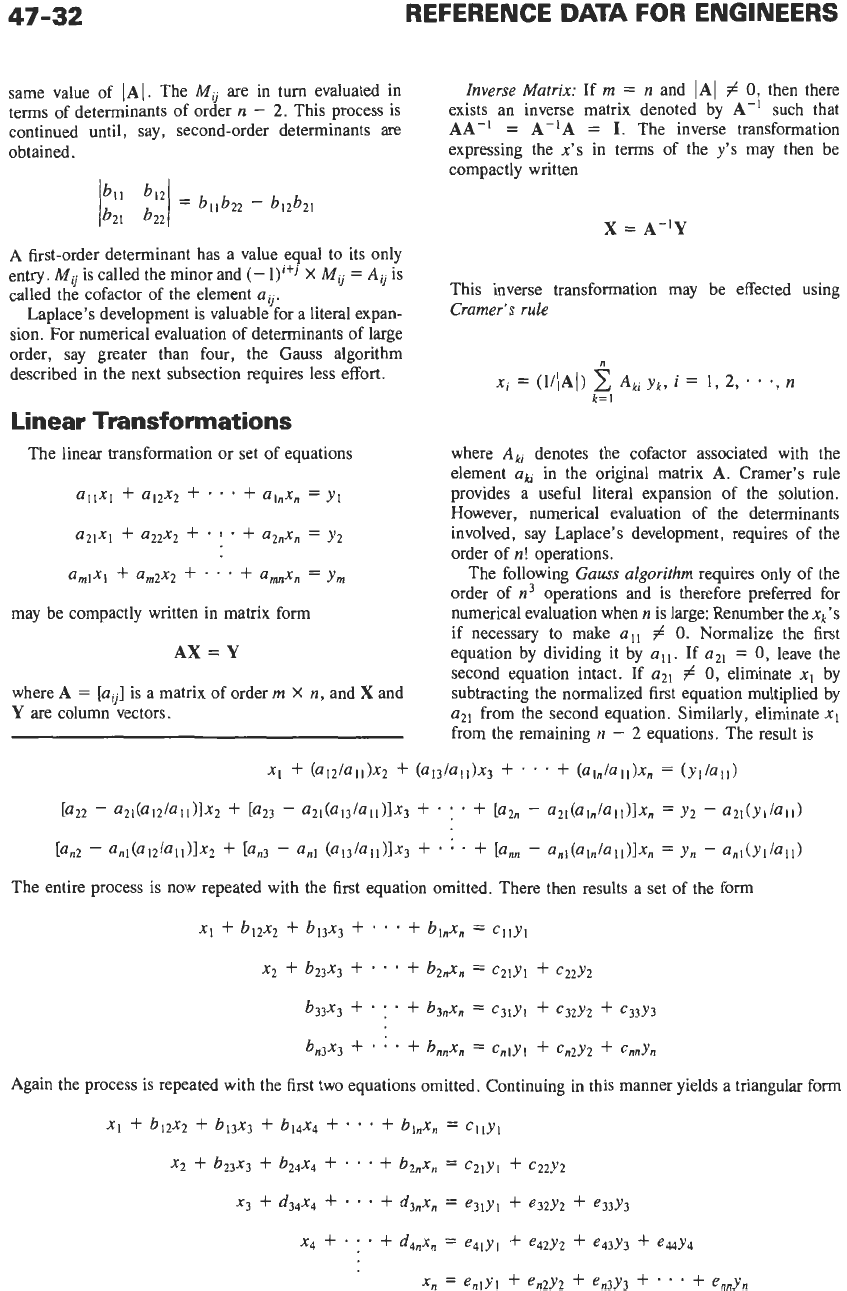
Linear Transformations
The linear transformation
or
set of equations
U1lXl
+
a12x2
+
-
* *
+
al,xn
=
y]
a21x1
+
aZ2x2
+
amlxl
+
am2x2
+
:
-
+
aZnxn
=
y2
*
+
amnxn
=
ym
may be compactly written in matrix form
AX=Y
where
A
=
[aij]
is a matrix of order
m
X
n,
and
X
and
Y
are
column vectors.
Inverse
Matrix:
If
m
=
n
and
IAl
#
0,
then there
exists
an
inverse matrix denoted by
A-'
such that
AA-I
=
A-'A
=
I.
The inverse transformation
expressing the
x's
in terms of the
y's
may then be
compactly written
X
=
A-'Y
This inverse transformation may be effected using
Cramer's
rule
where
Aki
denotes the cofactor associated with the
element
aki
in the original matrix
A.
Cramer's rule
provides a useful literal expansion of the solution.
However, numerical evaluation of the determinants
involved, say Laplace's development, requires of the
order of
n!
operations.
The following
Gauss
algorithm
requires only of the
order of
n3
operations and is therefore preferred for
numerical evaluation when
n
is large: Renumber the
xk's
if necessary to make
all
#
0.
Normalize the first
equation by dividing it by
all.
If
aZ1
=
0,
leave the
second equation intact.
If
aZ1
#
0,
eliminate
xl
by
subtracting the normalized first equation multiplied by
az1
from the second equation. Similarly, eliminate
x1
from the remaining
n
-
2
equations. The result is
MATHEMATICAL EQUATIONS
47-33
Note that the last equation gives the value of
n,.
This
may be substituted in the next to the last equation to
obtain
x,-~
and
so
on.
If the
y’s
are literal as shown
above, the process will yield the inverse transformation
X
=
A-‘Y
where
A-‘
is the inverse of the original matrix. If the
y’s
are numerical, labor is saved by combining the
values
on
the right side of each equation at each step of
the algorithm.
Since the determinant of a triangular matrix is equal
to the product of the elements on the main diagonal
IAl
=
a11a22’a33’
* *
annf
where
awr
is the quantity the kth equation is divided by
in the above Gauss algorithm. This is useful for
evaluating determinants of large order since it requires
only of the order of
n3
operations.
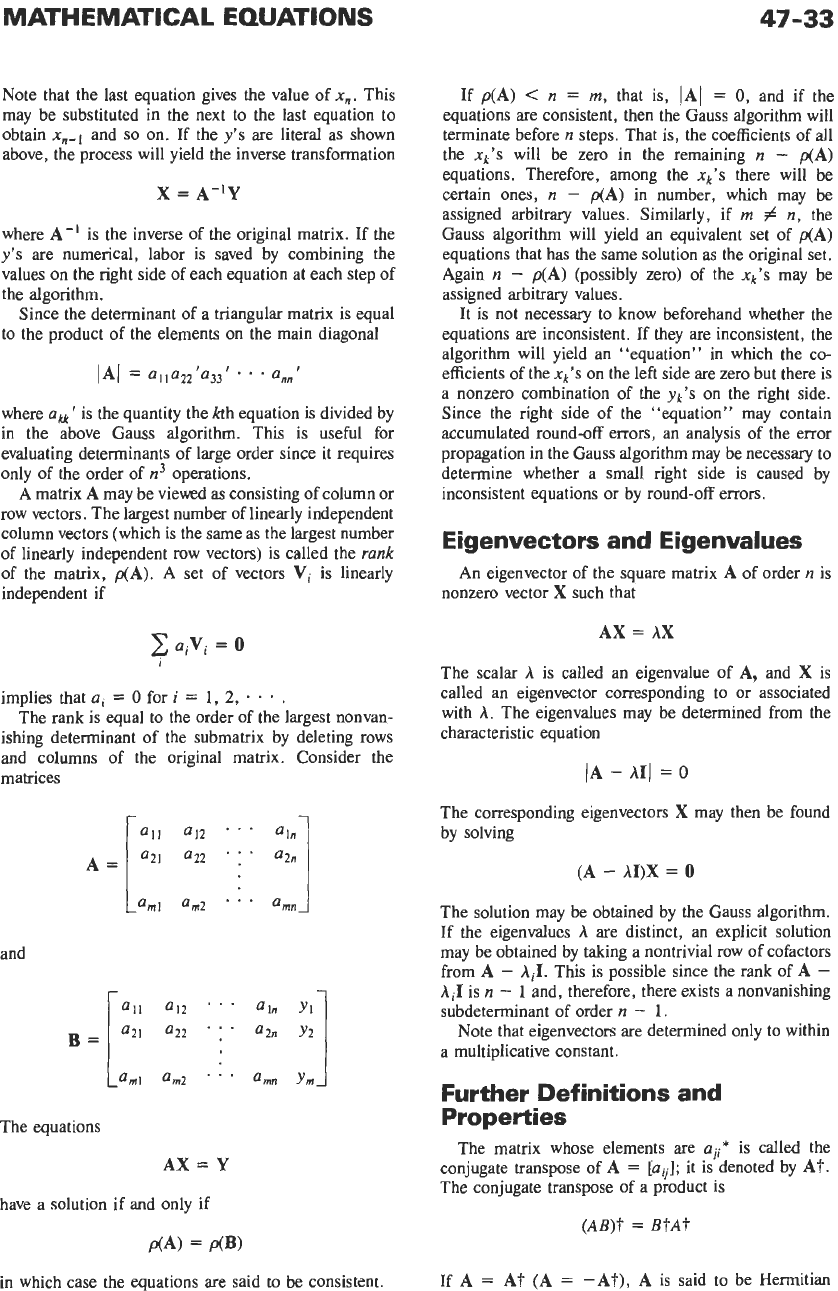
A matrix
A
may be viewed as consisting of column or
row vectors. The largest number of linearly independent
column vectors (which is the same as the largest number
of linearly independent row vectors) is called the
rank
of the matrix,
p(A).
A
set of vectors
Vi
is linearly
independent if
2
a,vi
=
0
1
implies that
ai
=
0
for
i
=
1,
2,
* *
+
.
The rank is equal to the order of the largest nonvan-
ishing determinant of the submatrix by deleting rows
and columns of the original matrix. Consider the
matrices
and
The equations
AX
=
Y
have a solution if and only if
d-4)
=
p(B)
in which case the equations are said to be consistent.
If
p(A)
<
n
=
m,
that is,
[AI
=
0,
and if the
equations are consistent, then the Gauss algorithm will
terminate before
n
steps. That is, the coefficients of all
the
nk’s
will be zero in the remaining
n
-
p(A)
equations. Therefore, among the
xk’s
there will be
certain ones,
n
-
p(A)
in number, which may be
assigned arbitrary values. Similarly, if
m
#
n,
the
Gauss algorithm will yield an equivalent set of
p(A)
equations that has the same solution as the original set.
Again
n
-
p(A)
(possibly zero) of the
xk’s
may be
assigned arbitrary values.
It is not necessary
to
know beforehand whether the
equations are inconsistent. If they are inconsistent, the
algorithm will yield an “equation” in which the co-
efficients of the
xk’s
on the left side are zero but there is
a nonzero combination of the
yk’s
on the right side.
Since the right side of the “equation” may contain
accumulated round-off errors, an analysis
of
the error
propagation in the Gauss algorithm may be necessary to
determine whether a small right side is caused by
inconsistent equations or by round-off errors.
Eigenvectors and Eigenvalues
An eigenvector of the square matrix
A
of order
n
is
nonzero vector
X
such that
AX
=
AX
The scalar
A
is called an eigenvalue of
A,
and
X
is
called an eigenvector corresponding to or associated
with
A.
The eigenvalues may be determined from the
characteristic equation
(A
-
AI1
=
0
The corresponding eigenvectors
X
may then be found
by solving
(A
-
AI)X
=
0
The solution may be obtained by the Gauss algorithm.
If the eigenvalues
A
are distinct, an explicit solution
may be obtained by taking a nontrivial row of cofactors
from
A
-
A,I.
This is possible since the rank of
A
-
AiI
is
n
-
1
and, therefore, there exists a nonvanishing
subdeterminant of order
n
-
1.
Note that eigenvectors are determined only to within
a multiplicative constant.
Further Definitions
and
Properties
The matrix whose elements are
aji*
is called the
conjugate transpose of
A
=
[aij];
it is denoted by
A?.
The conjugate transpose of a product is
(AB)?
=
BtA?
If
A
=
At
(A
=
-At),
A
is said to be Hermitian
47-34
REFERENCE
DATA
FOR
ENGINEERS
(skew-Hermitian). If
AtA
=
I,
A
is called unitary. If
AIA
=
AAt,
A
is called normal, Diagonal, unitary,
Hermitian, and skew-Hermitian matrices
are
special
cases of normal matrices. If the matrix
A
is real (that is,
all entries are real), the terms Hermitian, skew-
Hermitian, and unitary are usually replaced by symmet-
ric, skew-symmetric, and unitary, respectively. The
eigenvalues of Hermitian, skew-Hermitian, and unitary
matrices are real, pure imaginary, and of unit absolute
value, respectively.
The inner product of vectors
x
and
y
is
n
i=
I
XtY
=
xi*yi
where
xi*
is the complex conjugate of
xi.
(A
square
matrix of order one is considered here as a scalar.)
The length of a vector is given by
Two vectors are said to be orthogonal if
xtY
=
0
Orthogonality corresponds to perpendicularity in two
and three dimensions. Inner products obey the follow-
ing inequalities
IXtYI
5
llXllllYll
(Schwarz)
IIX
-t
Y/I
5
llxll
+
IIYII
(Triangle)
Two matrices
A
and
B
are called similar if there
exists a nonsingular matrix
C
such that
B
=
CAC-I
Of particular interest is the case in which matrix
B
is
diagonal
The diagonal elements
hi
are the eigenvalues of the
matrix
A.
Not all matrices are similar to diagonal ones.
However, if a matrix of order
n
has
n
linearly indepen-
dent eigenvectors, as is the case with normal matrices
or when all its eigenvalues
are
distinct, it can be
diagonalized. This may be done as follows: Let
Then
0
A2
0
0
0
0
A,
J
The matrix formed from the eigenvectors is nonsingular
since the eigenvectors are linearly independent. Hence
If a matrix
A
is reducible to diagonal form, polyno-
mial functions of
A
are readily calculated
f(A)
=
f(C-’BC)
Matrices can always be reduced to the Jordan canoni-
cal form, in which the eigenvalues are on the main
diagonal and there are ones in certain places just above
the main diagonal, and zeros elsewhere. In this form,
operations such as polynomial functions are simplified.
Hermitian Forms
A
Hermitian
form
is
a polynomial
where
A
is a Hermitian matrix. Hermitian forms are
real-valued and satisfy the inequality
h,l(X112
5
XIAX
5
hlIjXl(2
in which
A,
and
A,
are the largest and smallest eigen-
values of
A.
By a suitable change of variable
Y=TX
any Hermitian form
XtAX
may be reduced.
MATHEMATICAL EQUATIONS
47-35
n
XtAX
=
YSTATtY
=
AilyiI2
i=l
by choosing
T
to be that unitary matrix which diag-
onalizes
A.
The maximum value of
XtAX
for all unit vectors
X,
that is,
llXll
=
1,
is the largest eigenvalue of
A,
say
AI.
A
vector yielding this largest value will be a correspond-
ing eigenvector, say
XI.
The maximum of
XtAX
overall unit vectors orthogonal to
XI
will be another
eigenvalue, say
A2.
A
vector yielding
A,
will be a
corresponding eigenvector, say
Xz.
The process is
repeated considering unit vectors orthogonal to both
X
and
X2.
In this way, the eigenvalues of any Hermitian
matrix may be found.
VECTOR-ANALYSIS
EQUATIONS
Rectangular Coordinates
type.)
(In
the following, vectors are indicated in bold-faced
Notation:
a
=
ai
a
=
magnitude of
a
i
=
unit vector in direction of
a
Associative Law:
For addition
a
+
(b
+
c)
=
(a
+
b)
+
c
=
a
+
b
+
c
Commutative Law:
For
addition
a+b=b+a
Scalar or “Dot” Product (Fig.
21
1:
a.b=b.a
=
ab
cos6
where
0
=
angle included by
a
and b.
i
Fig.
21.
“Dot”
product.
Vector or
“Cross”
Product:
ax
b= -bxa
=
absin0ir
where,
0
=
smallest angle swept in rotating
a
into b,
f
=
unit vector perpendicular to plane of
a
and b,
and directed in the sense of travel of a
right-hand screw rotating from
a
to b through
the angle
6.
Distributive Law for Scalar Multiplication:
a-(b+ c)
=
a-b
+
a.c
Distributive Law for Vector Multiplication:
a
X
(b
+
c)
=a
X
b
+
a
X
c
Scalar Triple Product:
a.
(b
X
c)
=
(a
x
b)
.
c
=
c
-
(a
X
b)
=
b (c
x
a)
Vector Triple Product:
a
x
(b
X
c)
=
(a c)b
-
(a b)c
(a
x
b)
.
(c
x
d)
=
(a
.
c)(b
.
d)
-
(a
-
d)(b
.
c)
(a
x
b)
x
(c
x
d)
=
(a
X
b
*
d)c
-
(a
x
b
.
c)d
Del Operator:
V
=
i(a/ax)
+
j(a/ay)
+
k(d/az)
where
i,
j,
k
are unit vectors in the directions of the
x,
y,
z
coordinate axes, respectively.
Gradient:
grad4
=
V4
=
i(d+//ax)
+
j(a@dy)
+
k(&$//az),
in Cartesian coordinates
Divergence:
diva
=
V
.
a
=
(aa,/ax)
+
(da,/dy)
+-
(aa,/az),
in Cartesian coordinates
where
a,,
uy,
a,
are components of
a
in the directions
of the
x,
y,
z
coordinate axes, respectively.
div(a
+
b)
=
diva
+
divb
div(c#Ja)
=
c#J
diva
+
a
grad4
Curl:
curla
=
V
x
a
47-36
I
REFERENCE DATA FOR ENGINEERS
coordinates
curl(a
+
b)
=
curla
+
curlb
curl(&)
=
grad4
X
a
+
@curla
curl grad4
=
0
div curla
=
0
div(a
x
b)
=
b
-
curla
-
a
.
curlb
Laplacian
V2
=
V
V
v24
=
(a2yax2)
+
(a2@ay2)
+
(a2@az2),
in Cartesian coordinates
curl curla
=
grad diva
-
=
V(V
a)
-
(iV2ax
+
jV 2ay
+
kV 2az)
Va
Directional Derivative:
Derivative of
4
in the direc-
tion of
s
Integral Relations:
In the following equations,
T
is a
volume bounded by a closed surface,
S.
The unit vector
n
is normal
to
the surface and
is
directed outward. The
symbol
dS
represents an element
of
surface area.
If
the
surface is represented by
z
=
f(x,
y)
then
ds
=
[i
+
(af/axl2
+
(af/axl2
+
dx dy
where
alan
is the derivative in the direction of
n
(Green’s theorem).
In the two following equations,
S
is an open surface
bounded by a contour
C,
with distance along
C
represented by
s.
I,
(V
x
a)
-
ndS
=
a
*
ds
(Stokes’ theorem)
I,
where,
s
=
s3,
3
is the unit tangent vector along
C.
Gradient, Divergence, Curl, and Laplacian
in
Coordinate
Systems Other Than Rectangular
grad$
=
V$
=
(a+/ap)j5
+
p-’(a$/a@$
+
(aX/az)k
Cylindrical Coordinates:
(p,
4,
z),
unit vectors
j5,
6,
k,
respectively
Let
a
=
app
+
as6
+
a,k.
Then
diva
=
V
a
=
p-’(a/ap)(pa,)
+
p-’(aas/&$)
+
(aaJaz)
curla
=
V
x
a
=
[p-l(aa,/a@
-
(a~,pz)]j5
+
[(aa,/dz)
-
(aa,/ap)]&
+
[p-l(a/ap)(pa+)
-
p-i(a~,/a+)lk
v2q
=
p-l(a/ap)[~(a$/ap)i
+
p-2(a2$/a42)
+
(aZ$/az2)
Spherical Coordinates: (r,
0,
4),
unit vectors
i,
6,
6
r
=
distance to origin
MATHEMATICAL EQUATIONS
47-37
0
=
polar
angle
4
=
azimuthal angle
grad$
=
V$
=
(aJ//ar)i
+
r-’(a$/ae)8
+
(r
sine)-’(a$/a4)&
Let
a
=
a,f
+
ud6
+
a,+..
Then
diva
=
V
-
a
=
r-’(a/ar)(r2a,)
+
(r sine)-l(alae)(a, sine)
+
(r
sine)-’(aa,la4)
curla
=
V
x
a
=
(r sine)-’[(a/aO)(a, sine)
-
(aas/a4)]i
Space
Curves
A
curve may be represented vectorially as
r=r(s).
A
unit tangent
t
is then given by
See Fig.
22.
t
=
drlds
The principal normal
n
is
given by
n
=
(l/k)(dt/ds)
where
k
is the curvature. The radius of curvature
R=
Ilk.
For a plane curve
y=f(x),
the curvature may be
computed from
k=
ly”l/[l
+
(Y’)~]~’?
The binormal is defined by
b=t
x
n
These vectors satisfy Frenet’s equations
dnlds
=
-kt
+
rb
dblds
=
-rn
X
\
J
Fig.
22.
Space
curve.
where
T
is the torsion. The torsion
is
zero everywhere if
and only if the curve lies in a plane.
47-38
REFERENCE DATA FOR ENGINEERS
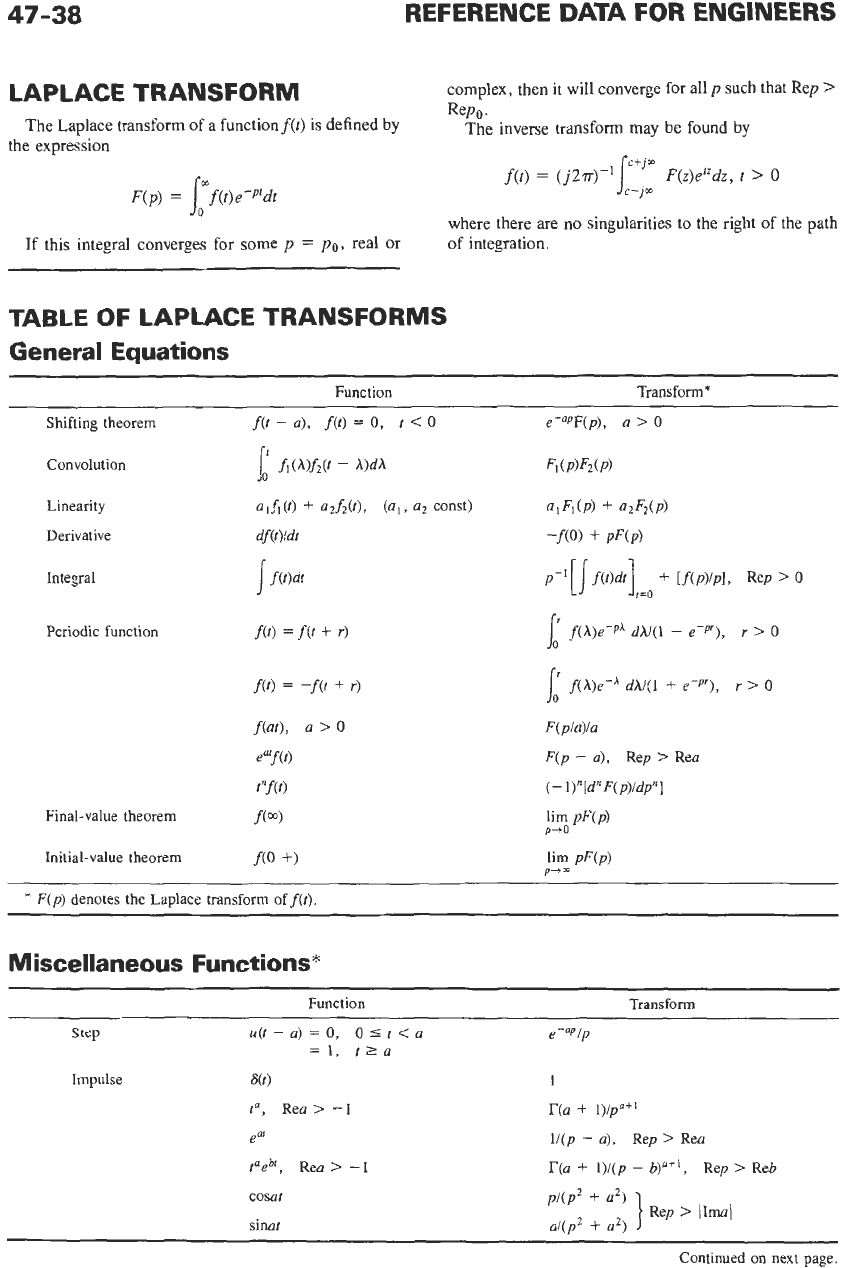
complex, then it will converge for all p such that Rep
>
RePo.
LAPLACE TRANSFORM
The Laplace transform of a functionf(t) is defined by
The inverse transform may be found by
the expression
ctjw
c-jm
f(t)
=
(jZr)-l/
F(z)erzciz,
t
>
o
F(p)
=
f(t)e-Prdt
where there are no singularities to the right of the path
of integration.
I,"
If
this integral converges for some
p
=
po,
real
or
TABLE OF LAPLACE TRANSFORMS
General Equations
~~~ ~
Function Transform*
Shifting theorem
f(t
-
a),
f(t)
=
0,
t
<
0
e-"PF(p),
a
>
0
Convolution
id
fi(hlfi(t
-
Ndh
FI
(PF2
(P)
Linearity
Derivative
Integral
Initial-value theorem
f(0
+)
F(p/a)la
F(p
-
a),
(
-
1)"
[d"
F(p)idp"
1
Rep
7
Rea
*
F(p)
denotes the Laplace transform
off(?).
~~
Miscellaneous Functions*
Function Transform
Step
u(t-a)=O,
o=tca
-
-1,
??a
Impulse
1
tu,
Rea
>
-1
r(a
.t
l)/poi'
e
"
l/(p
-
a),
Rep
>
Rea
t'ebt,
Rea
>
-1
r(a
$.
l)l(p
-
b)OT', Rep
>
Reb
cosat
sinat
>
Continued
on
next page.
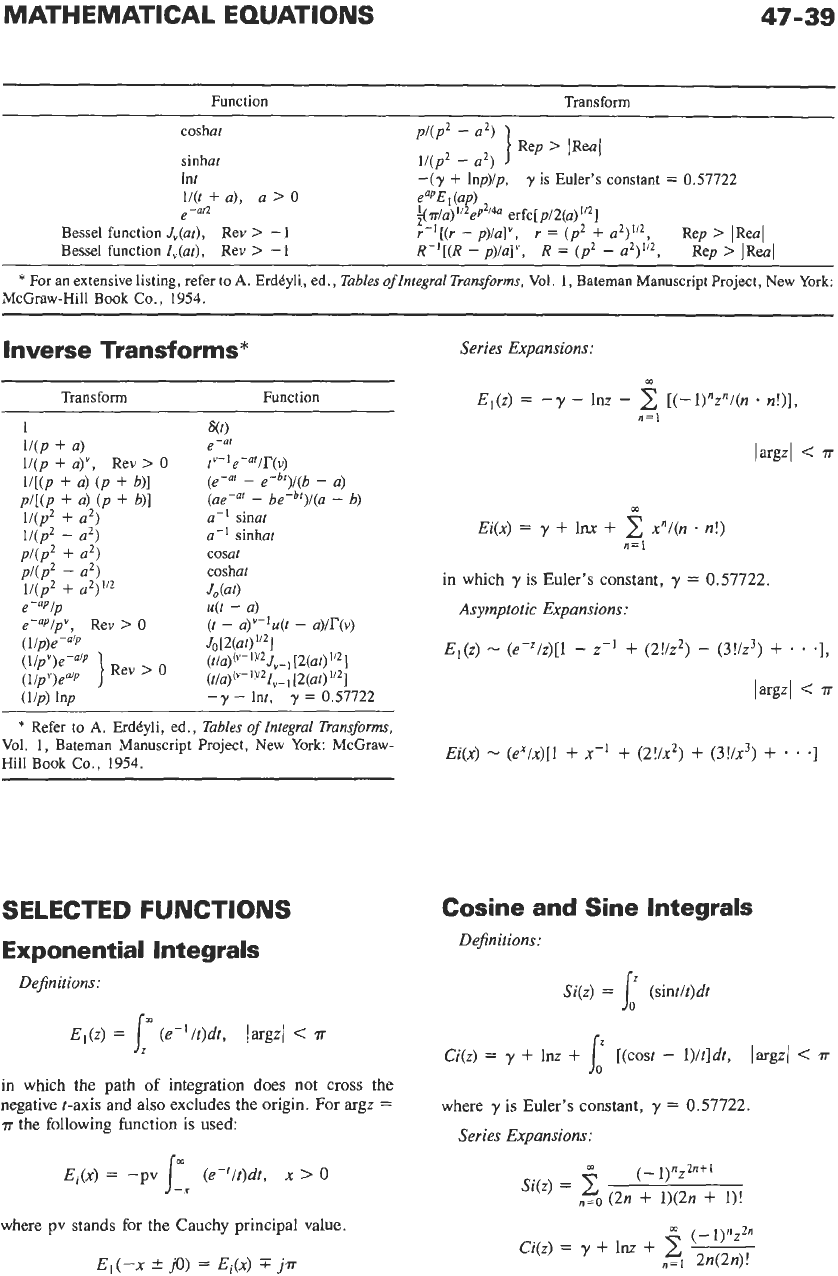
MATHEMATICAL EQUATIONS
47-39
Function Transform
pi(p2
-
")
1
Rep
>
lReu1
coshat
sinhat
ll(p2
-
a2)
Int
-(y
+
lnp)/p,
y
is
Euler's constant
=
0.57722
Il(t
+
a),
a
>
0
eapE1 (up)
e
-at2
$z-/a)
1'2ep2/40
erfc[p/2(a)
1/21
Bessel function
J,(at),
Rev
>
-
1
r-'[(r
-
p)/a]",
r
=
(p2
+
u~)"~, Rep
>
[Real
Bessel function I,(at),
Rev
>
-
1
R-'[(R
-
p)/a]",
R
=
(p2
-
a2)112,
Rep
>
lReul
*
For an extensive listing, refer
to
A.
ErdCyli, ed., Tables oflntegral Transforms, Vol.
1,
Bateman Manuscript Project, New York:
McGraw-Hill Book
Co.,
1954.
Inverse Transforms*
Transform Function
s(t)
e-nt
tv-l
-af
(e-0r
-
edb')/(b
-
a)
@el-"'
- -
b)
a-
sinat
.-I
sinhat
cosat
coshat
J,
(at)
u(t
-
a)
e
iT(v)
*
Refer to
A.
ErdCyli, ed., Tables
of
Integral Transforms,
Vol.
1, Bateman Manuscript Project, New York: McCraw-
Hill Book
Co.,
1954.
SELECTED FUNCTIONS
Exponential Integrals
Dejinitions:
E,(z)
=
JIP
(e-'/t)dt, largz/
<
r
in which the path of integration does not cross
the
negative t-axis and
also
excludes the origin. For argz
=
T
the following function is used:
where pv stands for the Cauchy principal value.
E,(-x
&
j0)
=
Ei(x)
7
j.rr
Series Expansions:
m
El(z)
=
-y
-
lnz
-
2
[(-l)"zn/(n
*
n!)],
n=l
in which
y
is
Euler's constant,
y
=
0.57722.
Asymptotic Expansions:
E,(z)
-
(e-'/z)[I
-
z-'
+
(2!/z2)
-
(3!/z3)
+
*
-1,
largzl
<
r
Ei(x)
-
(e"/x)[l
+
x-l
+
(2!/x2)
f
(3!/x3)
+
*
.
.]
Cosine and Sine Integrals
Dejnitions:
si(z)
=
(sint/t)dt
Ci(z)
=
y
+
lnz
+
where
y
is Euler's constant,
y
=
0.57722.
[(cost
-
l)/t]dt,
largz/
<
T
l
Series
Expansions: