Рудаков В.В., Козярук А.Е. Системы управления электроприводов. Прямое управление моментом в электроприводе переменного тока
Подождите немного. Документ загружается.

Федеральное агентство по образованию
Санкт-Петербургский государственный горный институт им. Г.В.Плеханова
(технический университет)
В.В. РУДАКОВ, А.Е. КОЗЯРУК
СИСТЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОВ
Прямое управление моментом в
электроприводе переменного тока
Mq_[gh_ ihkh[b_
САНКТ-ПЕТЕРБУРГ
2007 г.
65
чами. Частота заполнения полуволн выходного напряжения преобра-
зователя частоты с возрастанием выходной частоты снижается. Это
обстоятельство ведет к изменению формы фазных токов в статорных
обмотках асинхронного двигателя.
В математических моделях эти функции преобразуются в ор-
тогональную двухфазную систему координат, неподвижную в про-
странстве (систему координат α - β). Для этого в
моделях предусмот-
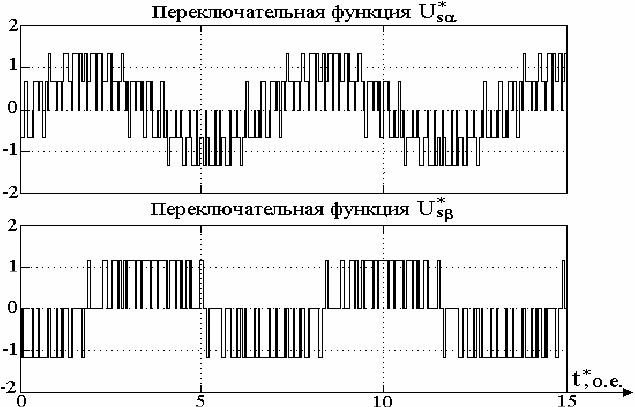
рен формирователь выходных напряжений. В реальных системах это
преобразование выполняется в блоке вычисления ненаблюдаемых
координат для получения переключательных функций U
sα
* и U
sβ
*.
Эти же функции в масштабе представляют собой входные напряже-
ния для асинхронного двигателя в математической модели системы
DTC. Они имеют вид, показанный на рис.3.7
.
Рис.3.7. Переключательные функции системы DTC при ω
уст
= ω
ном
.
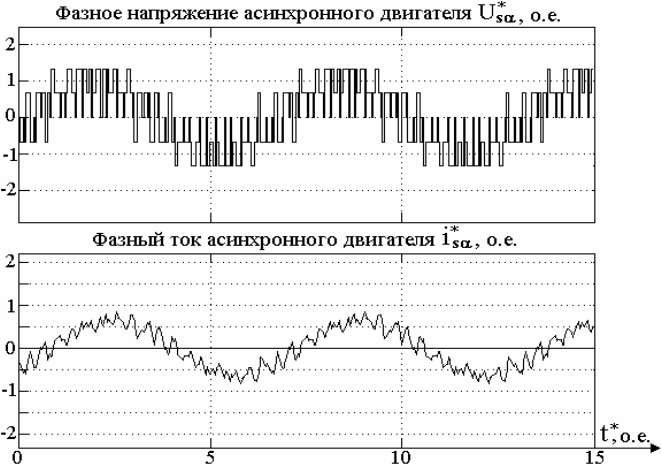
Подавая эти напряжения на вход математической модели
асинхронного двигателя, можно рассчитать электромагнитные про-
цессы в системе DTC. Установившиеся значения фазных токов и на-
пряжений двигателя в системе DTC приведены на рис 3.8.
66
Рис.3.8. Установившиеся значения фазных токов и напряжений асинхронной
машины в системе DTC.
Сигналы на выходе формирователя выходных напряжений
системы DTC, естественно, не в полной мере соответствуют выход-
ным напряжениям преобразователя частоты в реальных системах.
Математические модели строятся в предположении, что силовая
часть преобразователя частоты состоит из идеальных силовых элек-
тронных ключей. В моделях не учитываются электромагнитные про-
цессы в IGBT-транзисторных модулях, которые являются
основным
элементом в силовой преобразовательной технике. Такое допущение
вносит погрешность в результаты моделирования. Однако, для каче-
ственной оценки электромагнитных и электромеханических процес-
сов, протекающих в системах электропривода с системами DTC-
управления, такое допущение оправдано.
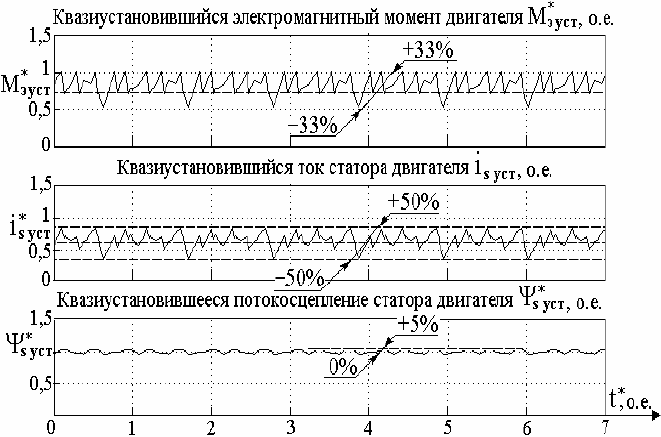
Процессы в электроприводе с прямым управлением моментом
имеют квазиустановившийся характер, поскольку гистерезисные ре-
67
лейные регуляторы потокосцепления статора и электромагнитного
момента двигателя в установившемся режиме работы электропривода
остаются в автоколебательном режиме. Это вызывает высокочастот-
ные колебания электромагнитного момента, тока и потокосцепления
статора двигателя в установившихся режимах работы. Так как часто-
та этих колебаний высока, на частоту вращения двигателя они влия-
ния не оказывают. На
рис. 3.9 приведены квазиустановившиеся кри-
вые изменения электромагнитного момента, тока и потокосцепления
статора двигателя.
Рис.3.9. Квазиустановившиеся значения электромагнитного момента, тока и
потокосцепления статора асинхронной машины в системе DTC.
Амплитуда и частота квазиустановившихся колебаний опре-
деляются настройками релейных регуляторов. При снижении устано-
вившейся частоты вращения частота квазиустановившихся колебаний
электромагнитного момента и тока статора двигателя возрастает, а
амплитуда этих колебаний снижается. Амплитуда колебаний пото-
косцепления статора мало зависит от установившегося значения час-
тоты вращения двигателя, а определяется, главным образом, величи-
ной гистерезисного допуска соответствующего релейного регулятора.
68
Следует отметить, что, несмотря на кажущееся сходство кри-
вых фазных напряжений и токов в системе DTC с системами, в кото-
рых используется широтно-импульсная модуляция выходного напря-
жения автономного инвертора, принцип формирования этих кривых в
системах DTC качественно отличается от того, что имеет место в
ШИМ - инверторах. В системах с широтно-импульсной
модуляцией
выходного напряжения алгоритм модуляции задается извне. Система
регулирования никак не воздействует на процесс модуляции. В сис-
темах DTC характер изменения кривой выходного напряжения опре-
деляется исключительно функционированием таблицы переключе-
ний, то есть является внутренним свойством системы регулирования.
3.4. Расчет переходных процессов в системах
прямого управления моментом
Расчет переходных процессов в
системах DTC выполнен в со-
ответствии с функциональной схемой рис. 3.1. При расчетах во внеш-
нем контуре регулирования скорости был использован П - регулятор.
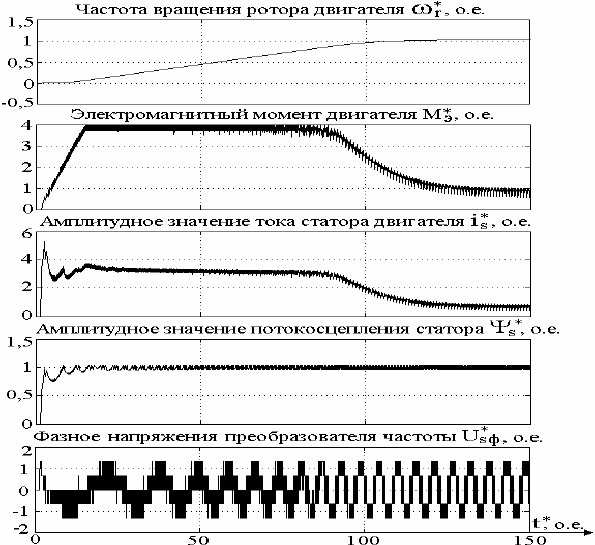
На графики выведены кривые изменения частоты вращения ротора
двигателя ω
r
*, электромагнитного момента двигателя М
э
*, амплитуд-
ного значения тока статора двигателя i
s
*, амплитудного значения по-
токосцепления статора двигателя Ψ
s
* и фазного напряжения на выхо-
де преобразователя частоты U
ф
*.
Рассмотрены следующие режимы работы частотно- управляе-
мого электропривода с системой прямого управления моментом:
- пуск двигателя из неподвижного состояния до номинальной
частоты вращения (ω
r
* = 1 о.е.);
- торможение двигателя от номинальной частоты вращения
(ω
r
* = 1 о.е.) до полной остановки;
- реверс двигателя от номинальной частоты вращения в на-
правлении "вперед" (ω
r
* = 1 о.е.) до номинальной частоты вращения в
направлении "назад" (ω
r
* = -1 о.е.).
- наброс двукратной нагрузки от М
с
* = 1 о.е. до М
с
* = 2 о.е.;
- сброс нагрузки до 10% от М
с
* = 1 о.е. до М
с
* = 0,1 о.е
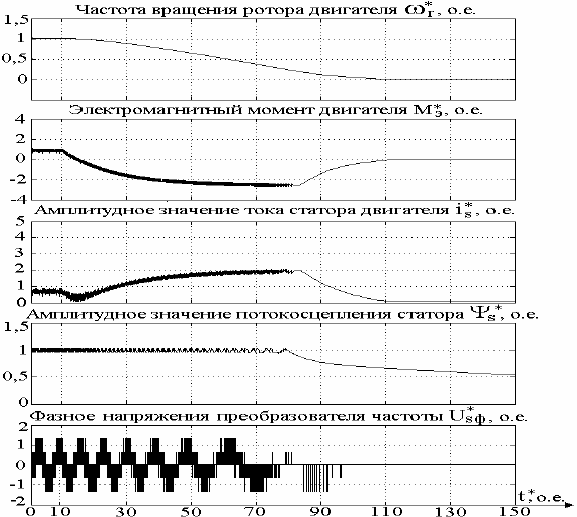
На рис.3.10 приведены пусковые характеристики электропри-
вода при пуске от нуля до номинальной частоты вращения.
69
Рис.3.10. Пуск асинхронного двигателя от нуля до номинальной
частоты вращения асинхронного двигателя в системе DTC.
Ограничение максимального значения электромагнитного
момента двигателя определяется настроечными параметрами релей-
ного регулятора момента. В данном примере ограничение электро-
магнитного момента было установлено на уровне 4М
э ном
.
Торможение в частотно-управляемом электроприводе, незави-
симо от принятой системы регулирования, осуществляется либо элек-
тродинамическим способом - при наличии в цепи постоянного тока
неуправляемого выпрямителя, либо рекуперативным способом - при
наличии в цепи постоянного тока управляемого, так называемого,
активного выпрямителя.
На рис.3.11. показан режим торможения асинхронного двига-
70
теля при частотном управлении с системой DTC от установившейся
скорости ω
r ном
* = 1 до полной остановки ω
r ном
* =0.
Рис.3.11. Торможение асинхронного двигателя от номинальной частоты до
полной остановки в системе DTC.
Характер переходных процессов при торможении несущест-
венно зависит от выбранного типа регулятора скорости. При стрем-
лении задающего сигнала к нулю в ноль обращаются по завершении
переходного процесса все основные переменные.
Для реверсирования электропривода в системе DTC не требу-
ется дополнительных средств. Реверс осуществляется путем измене-
ния знака задающего сигнала на
входе регулятора скорости. При за-
дании сигнала на реверс система сначала переходит в тормозной ре-
жим, а при достижении нулевого значения частоты вращения - в дви-
71
гательный режим. При этом изменение порядка следования фаз вы-
ходного напряжения преобразователя частоты обеспечивается за счет
изменения порядка следования импульсов с выхода определителя фа-
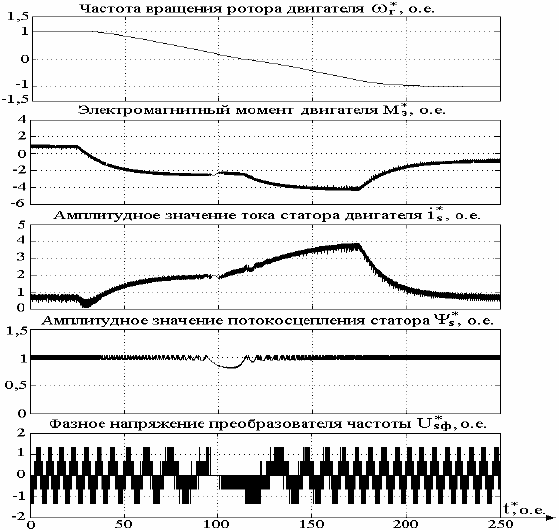
зового сектора. На рис. 3.12 приведена реверсивная характеристик
электропривода от полной частоты вращения в направлении "вперед"
до полной частоты вращения в направлении "назад".
Рис.3.12. Реверс асинхронного в системе DTC.
В момент изменения направления частоты вращения двигате-
ля в кривой изменения амплитуды потокосцепления статора наступа-
ет кратковременный провал, который достаточно быстро устраняется.
Рассмотренные переходные процессы в системе DTC пред-
ставляют собой реакцию системы на изменение управляющего воз-
действия. Представляет интерес также реакция системы на изменение
72
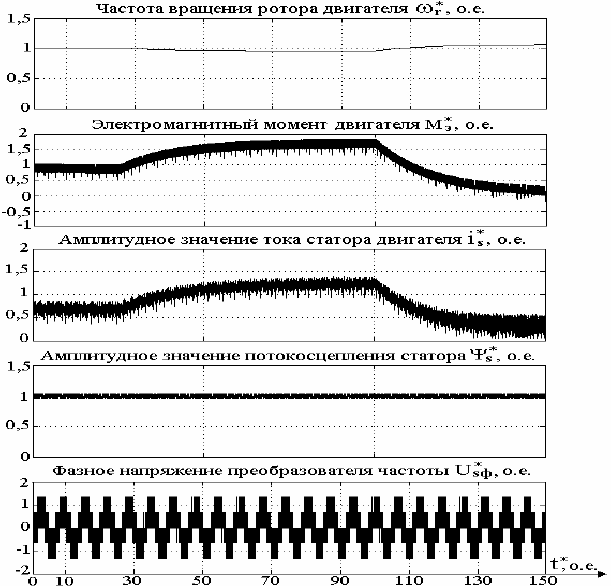
возмущающего воздействия. Оценка реакции системы на 100% на-
брос нагрузки и на сброс нагрузки до 10% номинальной показала, что
отработка возмущающих воздействий происходит достаточно Интен-
сивно. Отклонения скорости от установившегося значений не велики.
Рис.3.13. Наброс и сброс нагрузки в асинхронном электроприводе при номи-
нальной частоте вращения в системе DTC.
Таким образом, результаты анализа переходных процессов в
системе DTC показали, что система работоспособна во всех типовых
для электроприводов гонных машин режимах и обладает высокими
показателями качества переходных процессов, как с точки зрения бы-
стродействия, так и сточки зрения плавности регулирования.
73
ЗАКЛЮЧЕНИЕ
С помощью микропроцессорных средств в современных сис-
темах автоматического регулирования электроприводами переменно-
го тока с частотным управлением можно реализовать весьма сложные
алгоритмы управления. В то же время, для обеспечения высоких ста-
тических и динамических показателей объекта регулирования не все-
гда требуется алгоритм управления повышенной сложности. Поэтому
создание компактных
и эффективных алгоритмов управления являет-
ся актуальной задачей при разработках программного обеспечения
новых современных систем электроприводов. Одним из таких реше-
ний может служить способ прямого управления моментом асинхрон-
ного двигателя (принцип DTC-управления).
Разумеется, принцип прямого управления моментом приме-
ним отнюдь не всегда. Подобные системы целесообразно использо-
вать для электроприводов механизмов
и технологических комплек-
сов с тяжелыми условиями эксплуатации и жесткими требованиями
по быстродействию.
Тем не менее, системы прямого управления моментом можно
и необходимо выделить в отдельный класс систем частотно-
управляемого электропривода переменного тока. Об этом косвенно
свидетельствует большое количество публикаций в мировой научно-
технической периодике. В прилагаемом списке литературы присутст-
вует лишь малая толика того, что опубликовано на эту тему в послед-
ние годы.
В некоторых публикациях [21] системы прямого управления
моментом объединяются с системами нечеткого управления электро-
приводом. Использование FUZZY-логики при построении системы
управления частотным электроприводом переменного тока действи-
тельно обладают рядом свойств, подобных системам прямого управ-
ления моментом. Даже
предложена новая аббревиатура - FDTC
(Fuzzy Direct Torque Control). Такой подход вызывает сомнение, так
как, несмотря на некоторую схожесть результатов, системы нечеткого
управления частотно-управляемым электроприводом переменного
тока заслуживают того, чтобы быть выделенными в отдельную груп-
пу комплектных систем.