Samarskii A.A., Vabishchevich P.N. Numerical Methods for Solving Inverse Problems of Mathematical Physics
Подождите немного. Документ загружается.


196 Chapter 6 Right-hand side identification
DIMENSION VT(M), VY(M), VP(M), VV(M)
+ ,A(N), B(N), C(N), F(N), Y(N), VB(N), FB(N), W(N), Z(N)
C
C PARAMETERS:
C
C XL, XR - LEFT AND RIGHT END POINTS OF THE SEGMENT;
C XD - OBSERVATION POINT;
C N - NUMBER OF GRID NODES OVER THE SPATIAL VARIABLE;
C TMAX - MAXIMAL TIME;
C M - NUMBER OF GRID NODES OVER TIME;
C DELTA - INPUT-DATA INACCURACY;
C VY(M) - EXACT SOLUTION AT THE OBSERVATION POINT;
C VP(M) - DISTURBED SOLUTION AT THE OBSERVATION POINT;
C VT(M) - EXACT TIME DEPENDENCE OF THE RIGHT-HAND SIDE;
C VB(N)) - DEPENDENCE OF THE RIGHT-HAND SIDE ON THE SPATIAL
C VARIABLE;
C VV(M) - CALCULATED RIGHT-HAND SIDE VERSUS TIME;
C
XL = 0.D0
XR = 1.D0
XD = 0.3D0
TMAX = 1.D0
C
OPEN (01, FILE = ’RESULT.DAT’) ! FILE TO STORE THE CALCULATED DATA
C
C GRID
C
H=(XR-XL)/(N-1)
TAU = TMAX / (M-1)
ND = 1 + (XD + 0.5D0
*
H)/H
C
C DIRECT PROBLEM
C
C SOURCE
C
DOK=1,M
T = (K-0.5D0)
*
TAU
VT(K) = (K-0.5D0)
*
TAU
IF (T.GE.0.6D0) VT(K) = 0.D0
END DO
C
C DEPENDENCE OF THE RIGHT-HAND SIDE ON THE SPATIAL VARIABLE
C
DOI=1,N
VB(I) = DSIN(3.1415926
*
(I-1)
*
H)
END DO
C
C SOLUTION OF THE PROBLEM
C
C INITIAL CONDITION
C
T = 0.D0
DOI=1,N
Y(I) = 0.D0
END DO
VY(1) = Y(ND)

Section 6.3 Reconstruction of the time-dependent right-hand side 197
C
C NEXT TIME LAYER
C
DOK=2,M
T=T+TAU
C
C DIFFERENCE-SCHEME COEFFICIENTS
C
DOI=2,N-1
A(I) = 1.D0 / (H
*
H)
B(I) = 1.D0 / (H
*
H)
C(I) = 2.D0 / (H
*
H) + 1.D0 / TAU
END DO
C
C BOUNDARY CONDITIONS AT THE LEFT AND RIGHT END POINTS
C
B(1) = 0.D0
C(1) = 1.D0
F(1) = 0.D0
A(N) = 0.D0
C(N) = 1.D0
F(N) = 0.D0
C
C RIGHT-HAND SIDE OF THE DIFFERENCE EQUATION
C
DOI=2,N-1
F(I) = VB(I)
*
VT(K) + Y(I) / TAU
END DO
C
C SOLUTION AT THE NEXT TIME LAYER
C
ITASK = 1
CALL PROG3 ( N, A, C, B, F, Y, ITASK )
VY(K) = Y(ND)
END DO
C
C DISTURBING OF MEASURED QUANTITIES
C
DO K = 1,M
VP(K) = VY(K) + 2.D0
*
DELTA
*
(RAND(0)-0.5D0)
END DO
C
C INVERSE PROBLEM
C
C AUXILIARY FUNCTION
C
DOI=2,N-1
FB(I) = ( 1.D0 / VB(ND) )
+
*
(VB(I+1)-2.D0
*
VB(I) + VB(I-1)) / (H
*
H)
END DO
C
C SOLUTION OF THE PROBLEM
C
C INITIAL CONDITION
C
T = 0.D0
DOI=1,N
Y(I) = 0.D0
END DO

198 Chapter 6 Right-hand side identification
C
C NEXT TIME LAYER
C
DOK=2,M
T=T+TAU
C
C DIFFERENCE-SCHEME COEFFICIENTS
C
DOI=2,N-1
A(I) = 1.D0 / (H
*
H)
B(I) = 1.D0 / (H
*
H)
C(I) = 2.D0 / (H
*
H) + 1.D0 / TAU
END DO
C
C BOUNDARY CONDITIONS AT THE LEFT AND RIGHT END POINTS
C
B(1) = 0.D0
C(1) = 1.D0
F(1) = 0.D0
A(N) = 0.D0
C(N) = 1.D0
F(N) = 0.D0
C
C RIGHT-HAND SIDE OF THE DIFFERENCE EQUATION
C
DOI=2,N-1
F(I) = FB(I)
*
VY(K) + Y(I) / TAU
END DO
C
C SOLUTION OF THE FIRST SUBPROBLEM AT THE NEXT TIME LAYER
C
ITASK = 1
CALL PROG3 ( N, A, C, B, F, W, ITASK )
C
C DIFFERENCE-SCHEME COEFFICIENTS
C
DOI=2,N-1
A(I) = 1.D0 / (H
*
H)
B(I) = 1.D0 / (H
*
H)
C(I) = 2.D0 / (H
*
H) + 1.D0 / TAU
END DO
C
C BOUNDARY CONDITIONS AT THE LEFT AND RIGHT END POINTS
C
B(1) = 0.D0
C(1) = 1.D0
F(1) = 0.D0
A(N) = 0.D0
C(N) = 1.D0
F(N) = 0.D0
C
C RIGHT-HAND SIDE OF THE DIFFERENCE EQUATION
C
DOI=2,N-1
F(I) = - FB(I)
END DO
C
Section 6.3 Reconstruction of the time-dependent right-hand side 199
C SOLUTION OF THE SECOND SUBPROBLEM AT THE NEXT TIME LAYER
C
ITASK = 1
CALL PROG3 ( N, A, C, B, F, Z, ITASK )
C
VV(K) = (VP(K)-VP(K-1)
+ - (W(ND) / (1 - Z(ND)) - Y(ND) )) / (TAU
*
VB(ND))
DOI=1,N
Y(I) = W(I) + Z(I)
*
W(ND) / (1 - Z(ND))
END DO
END DO
C
C APPROXIMATE SOLUTION
C
WRITE ( 01,
*
) (VV(K), K = 2,M)
WRITE ( 01,
*
) (VT(K), K = 2,M)
CLOSE (01)
STOP
END
6.3.5 Computational experiments
Below, results of calculations are presented which were carried out for the simplest
model inverse problem (6.84)–(6.89). Within the concept of quasi-real experiment, we
consider the direct problem (6.84)–(6.87) with some given right-hand side. For the
equation coefficient and for the initial condition we put:
k(x) = 1, u
0
(x) = 0, 0 ≤ x ≤ 1.
The right-hand side is defined as
ψ(x) = sin (π x), 0 ≤ x ≤ 1,
η(t) =
t, 0 < t < 0.6,
0, 0.6 < t < T = 1.
This problem was solved numerically on a grid with N = 100, N
0
= 100.
Below, we give data obtained by reconstructing the right-hand side from observa-
tions performed at the point x
∗
= 0.3. The calculated data were used to specify the
mesh function ϕ
n
.
In the solution of the inverse problem, the mesh function ϕ(t) was perturbed using
random inaccuracies. We put
ϕ
n
δ
= ϕ
n
+ 2δ(σ
n
− 1/2),
where σ
n
is a random function normally distributed over the interval [0, 1]. The quan-
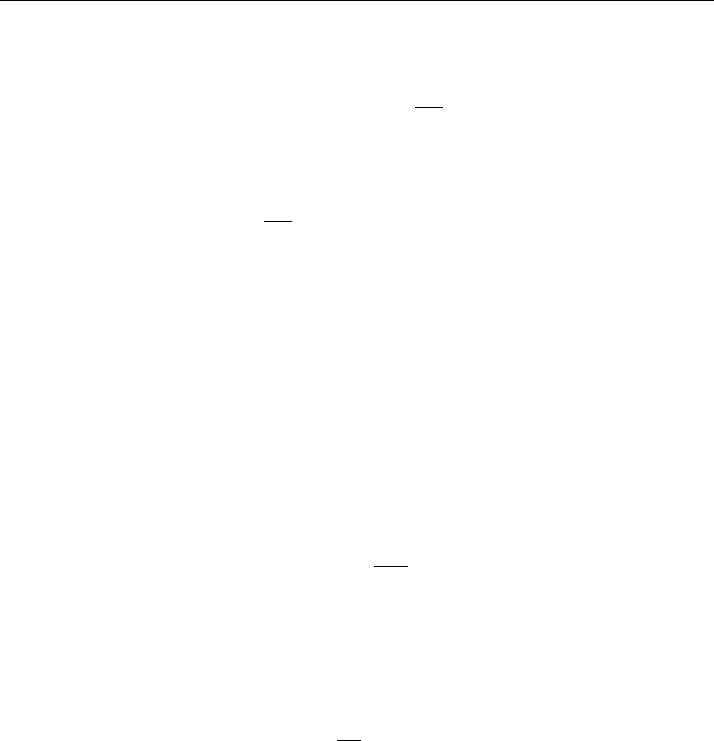
tity δ defines the inaccuracy level. Figure 6.9 presents, as a function of time, the exact
right-hand side and the right-hand side reconstructed by the above algorithm at the
inaccuracy level δ = 0.001.
200 Chapter 6 Right-hand side identification
Figure 6.9 Reconstructed right-hand side versus time at δ = 0.001
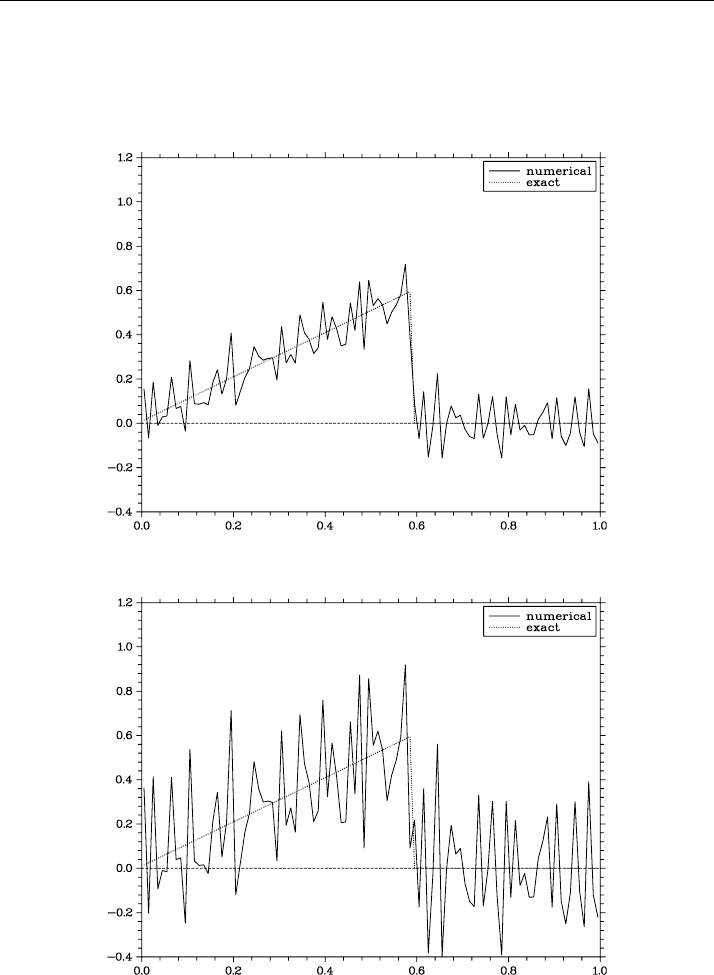
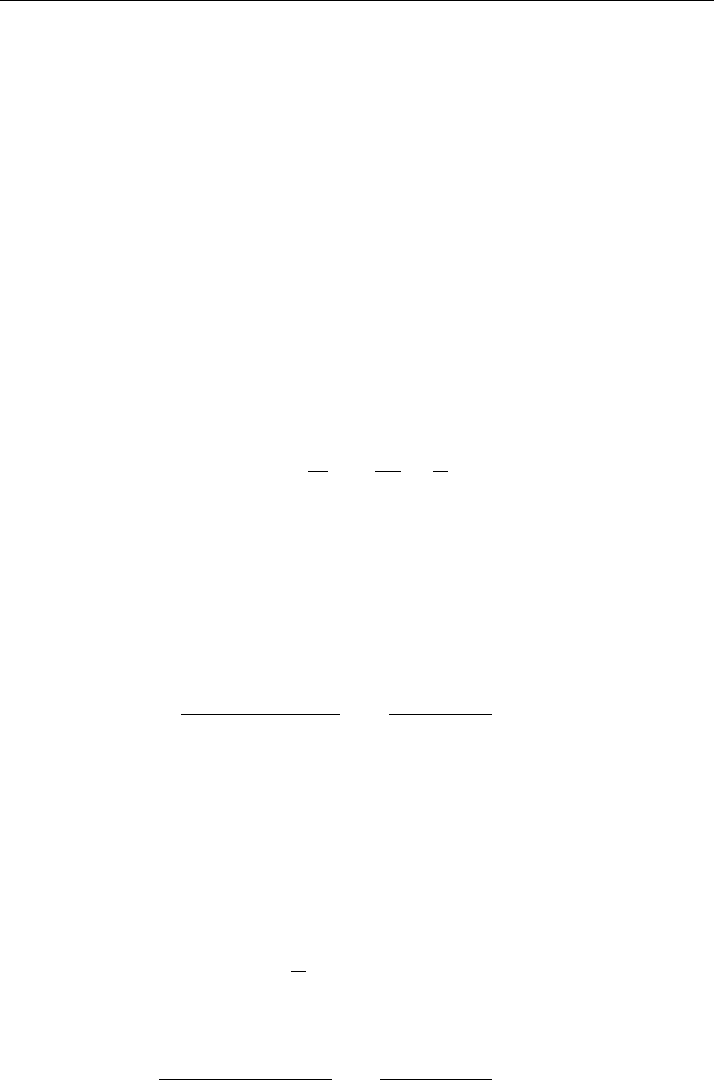
Figure 6.10 Solution of the inverse problem obtained with δ = 0.0025
Section 6.4 Identification of time-independent right-hand side: parabolic equations 201
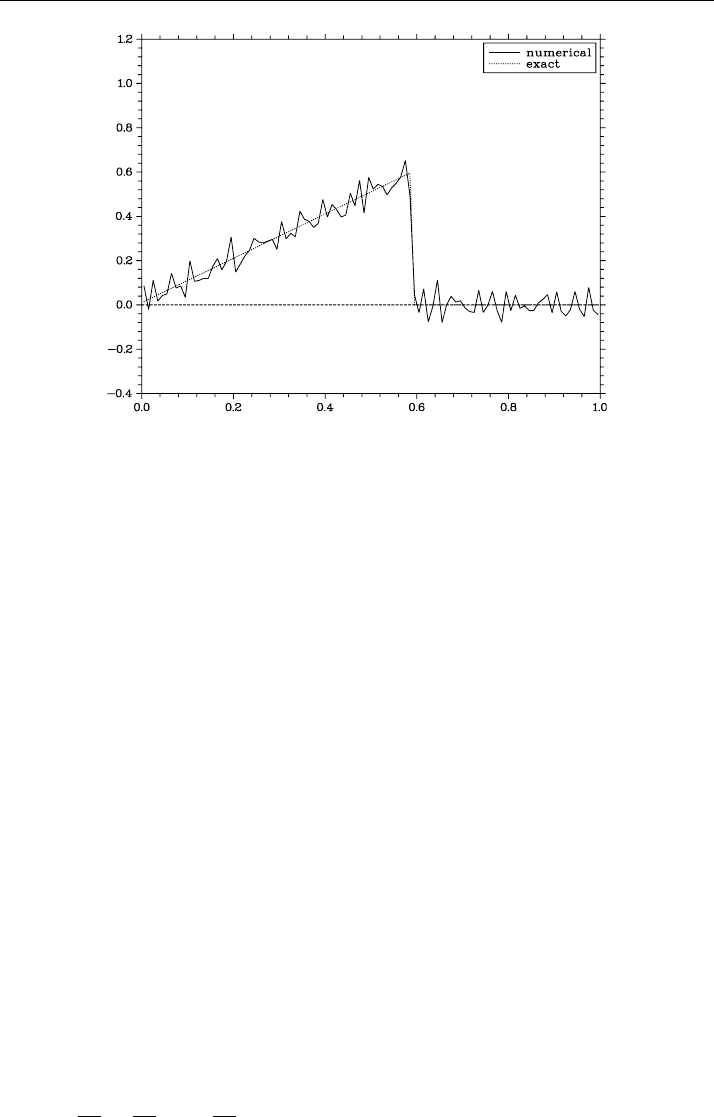
Figure 6.11 Solution of the inverse problem obtained with δ = 0.0005
Correctness of the considered inverse problem is illustrated by calculation data ob-
tained at various inaccuracy levels. Figures 6.10 and 6.11 show the solutions of the
problem obtained with δ = 0.0025 and δ = 0.0005, respectively. The lower is the
inaccuracy level, the more accurately can the solution be reconstructed.
The considered computational algorithm for solving the inverse problem can be used
to solve more general problems. In particular, multi-dimensional problems, problems
with many observation points, etc. can be treated much in the same manner. Fun-
damental difficulties (ill-posedness) arise when we pass to problems with localized
sources, with abandoned assumption ψ(x
∗
) = 0.
6.4 Identification of a time-independent
right-hand side of a parabolic equation
Below, we consider an inverse problem in which it is required to reconstruct the time-
independent right-hand side of a parabolic equation. Additional measurements are
assumed to be performed at the end time.
6.4.1 Statement of the problem
Consider a process governed by a second-order one-dimensional parabolic equation.
We assume that the dynamics of interest is defined by a time-independent, spatially
distributed source, so that
∂u
∂t
=
∂
∂x
k(x)
∂u
∂x
+ f (x), 0 < x < l, 0 < t ≤ T. (6.110)

202 Chapter 6 Right-hand side identification
We supplement this equation with first-kind homogeneous boundary conditions:
u(0, t) = 0, u(l, t) = 0, 0 ≤ t ≤ T. (6.111)
The initial state is defined by the condition
u(x, 0) = 0, 0 < x < l. (6.112)
With given coefficient k(x) and right-hand side f (x), relations (6.110)–(6.112) define
the direct problem.
Consider an inverse problem in which the unknown quantity is the right-hand side
f (x) of equation (6.110). We assume that the function f (x) can be reconstructed from
the known end-time solution; i.e., this function can be represented as
u(x, T ) = ϕ(x), 0 < x < l. (6.113)
To begin with, obtain an a priori estimate for the solution u(x, t) of the problem that
proves the solution to be stable with respect to weak perturbations of ϕ(x).
6.4.2 Estimate of stability
The simplest approach to the inverse problem (6.110)–(6.113) consists in elimination
of the unknown function ϕ(x). To this end, we differentiate the equation (6.110) with
respect to time:
∂
2
u
∂t
2
=
∂
∂x
k(x)
∂
2
u
∂x∂t
, 0 < x < l, 0 < t < T. (6.114)
For the latter equation, two boundary conditions, (6.112) and (6.113), are given for the
variable t.
For the problem (6.111)–(6.114), we use the operator notation that can be used to
study more general problems. We introduce a Hilbert space L
2
() with the following
scalar product and norm:
(v, w) =
v(x)w(x) dx, v
2
= (v, v) =
v
2
(x) dx.
For the functions v(x, t), w(x, t) from H = L
2
(Q
T
),weput
(v, w)
∗
=
T
0
(v, w) dt =
T
0
v(x)w(x) dx dt, v
∗
= ((v, v)
∗
)
1/2
.
On the set of functions satisfying the conditions (6.111), we define the operator
Au =−
d
dx
k(x)
du
dx
.
Section 6.4 Identification of time-independent right-hand side: parabolic equations 203
Among of the main properties of A in L
2
(), the following property deserves mention:
A = A
∗
≥ mE, m > 0.
Using the settings introduced, reformulate the problem (6.111)–(6.114) as the fol-
lowing boundary value problem:
d
2
u
dt
2
+ A
du
dt
= 0, 0 < t < T, (6.115)
u(0) = 0, u(T ) = ϕ. (6.116)
We pass from (6.115), (6.116) to a problem with homogeneous boundary conditions.
To do so, we represent the solution as
u(t) = w(t) +
t
T
ϕ. (6.117)
For the function w(t), we obtain the problem
d
2
w
dt
2
+ A
dw
dt
=−ψ, 0 < t < T , (6.118)
w(0) = 0,w(T ) = 0, (6.119)
where
ψ =
1
T
Aϕ.
To derive a simplest a priori estimate for the solution of problem (6.118), (6.119),
we scalarwise multiply equation (6.118) in H by w:
d
2
w
dt
2
,w
∗
+
A
dw
dt
,w
∗
=−(ψ, w)
∗
. (6.120)
Consideration of the constancy of A and the homogeneous boundary conditions
(6.119) gives
A
dw
dt
,w
∗
=
1
2
T
0
d
dt
(Aw, w) =
1
2
(Aw, w)
T
0
= 0.
With (6.119) taken into account, for the first term in (6.120) we obtain
d
2
w
dt
2
,w
∗
=−
dw
dt
,
dw
dt
=−
T
0
dw
dt
2
dt, 1
.
Then, substitution into (6.20) yields:
T
0
dw
dt
2
dt, 1
= (ψ, w)
∗
. (6.121)
204 Chapter 6 Right-hand side identification
The left-hand side of (6.121) can be estimated by invoking the Friedrichs inequality
T
0
v
2
dt ≤ M
0
T
0
dw
dt
2
dt.
By virtue of this, we have
T
0
dw
dt
2
dt, 1
≥ M
−1
0
(w
∗
)
2
.
For the right-hand side of (6.121), we use the estimate
(ψ, w)
∗
≤ψ
∗
w
∗
.
This allows us to obtain from (6.121) the desired inequality
w
∗
≤ M
0
ψ
∗
, (6.122)
which shows that the solution of problem (6.118), (6.119) is stable with respect to the
right-hand side.
With allowance for (6.122) and (6.117), for the solution of problem (6.115), (6.116)
we obtain
u
∗
≤ϕ
∗
+
M
0
T
Aϕ
∗
. (6.123)
Thus, in the inverse problem (6.115), (6.116) the solution u(t) continuously depends
on the conditions at t = T .
With the function u(t) found from the solution of the well-posed problem (6.115),
(6.116), the sought right-hand side f is given by
f =
du
dt
+ Au. (6.124)
A complete study of well-posedness of the inverse problem for the pair of functions
{u, f } poses the question how the functions u and f depend on the input data (on the
function ϕ). Above, we have restricted ourselves to obtaining the simplest estimate
(6.123) only for u.
6.4.3 Difference problem
The difference problem (6.110)–(6.113) reduces to the non-classical boundary value
problem (6.111)–(6.114). It makes sense to consider specific features of the computa-
tional algorithm, with special emphasis placed to the matter of time discretization. For
the mesh functions we use the same notation as for the continuous-argument functions.
For spatial discretization, we use a uniform grid ¯ω with a grid size h over the interval
¯
= [0, l]:
¯ω ={x | x = x
i
= ih, i = 0, 1,...,N, Nh = l},
Section 6.4 Identification of time-independent right-hand side: parabolic equations 205
where, as usual, ω is the set of internal nodes and ∂ω is the set of boundary nodes. In
the mesh Hilbert space L
2
(ω), we introduce the norm via the relation y=(y, y)
1/2
,
where
(y,w) =
x∈ω
y(x)w(x)h.
At internal nodes, we approximate the differential operator A with second order,
with the difference operator
Ay =−(ay
¯x
)
x
, x ∈ ω, (6.125)
where, for instance, a(x) = k(x − 0.5h).
On the set of functions vanishing on ∂ω (see (6.111)) for the self-adjoint operator A
under the constraints k(x) ≥ κ>0 and q(x) ≥ 0 there holds the estimate
A = A
∗
≥ κλ
0
E (6.126)
with a constant
λ
0
=
4
h
2
sin
2
πh
2l
≥
8
l
2
.
Over time, we use the uniform grid
¯ω
τ
= ω
τ
∪{T }={t
n
= nτ, n = 0, 1,...,N
0
,τN
0
= T }
and let y
n
= y(t
n
).
To approximate equation (6.114) with second order over time and space, we can
naturally use the difference equation
u
n+1
− 2u
n
+ u
n−1
τ
2
+ A
u
n+1
− u
n−1
2τ
= 0,
x ∈ ω, n = 1, 2,...,N
0
− 1.
(6.127)
This equation is supplemented with the boundary conditions (see (6.112), (6.113))
u
0
= 0, u
N
0
= ϕ, x ∈ ω. (6.128)
The difference problem (6.127), (6.128) can be examined analogously to the differ-
ential case. We represent (see (6.117)) the difference solution as
u
n
= w
n
+
t
n
T
ϕ, n = 0, 1,...,N
0
. (6.129)
The analogue of (6.118), (6.119) is the problem
w
n+1
− 2w
n
+ w
n−1
τ
2
+ A
w
n+1
− w
n−1
2τ
=−ψ,
x ∈ ω, n = 1, 2,...,N
0
− 1,
(6.130)