Шаманова С.И. Электропривод
Подождите немного. Документ загружается.

На рис. 16.5 а при регулировании скорости Ω происходит
компенсация внешнего возмущения электропривода – момента нагрузки
М
с
. На вход электропривода вместе с задающим сигналом скорости U
зс
подаётся сигнал, пропорциональный моменту нагрузки:
U
М
= k
M
M
с
, где
k
М
– коэффициент пропорциональности. В результате управление
электроприводом осуществляется суммарным сигналом
U
∆
, который,
автоматически изменяясь при колебаниях момента нагрузки, обеспечивает
поддержание скорости электропривода на заданном уровне. Этот вид не
нашёл широкого применения из – за сложности создания датчиков
возмущающего воздействия.
Замкнутый электропривод, построенный по принципу отклонения
(рис. 3.5
б), имеет цепи обратной связи ОС, соединяющие выход
электропривода с его входом. В данном случае при регулировании
скорости по цепи обратной связи информация о текущем значении
скорости (сигнал обратной связи
U
ос
= k
ос
Ω) подаётся на вход
электропривода, где он вычитается (или складывается) из сигнала задания
скорости
U
зс
. Управление осуществляется сигналом отклонения U
∆
= U
зс
±
U
ос
(его также называют сигналом рассогласования или ошибки),
который при отличии скорости от заданной соответственно автоматически
изменяется и с помощью системы управления электроприводом устраняет
эти отклонения.
ОС могут быть положительные и отрицательные, линейные и
нелинейные, жёсткие и гибкие.
Положительной называется такая
обратная связь, сигнал которой
U
ос
направлен согласно, то есть
складывается с задающим сигналом
U
зс
. Сигнал же отрицательной связи
направлен ему навстречу.
Жёсткая обратная связь действует как в установившемся, так и в
переходном режимах электропривода. Сигнал
гибкой обратной связи
вырабатывается только в переходных режимах электропривода.
Для
линейной обратной связи характерна пропорциональная
зависимость между выходным сигналом и сигналом обратной связи
U
ос
,
при реализации же
нелинейной связи эта зависимость нелинейна.
Если в замкнутых электроприводах требуется регулировать
несколько координат, то их схемы управления могут быть с
общим
усилителем
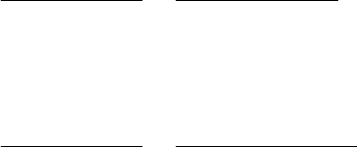
(рис. 3.6) или с подчинённым регулированием (рис. 3.7). В
замкнутом электроприводе с подчинённым регулированием каждая
координата имеет собственный контур обратной связи. Причём
внутренний контур подчинён внешнему контуру.
На рис. 3.6 электродвигатель
ЭД представлен из двух частей:
электрической части
ЭДЭ и механической ЭДМ. В этой схеме сигналы
20
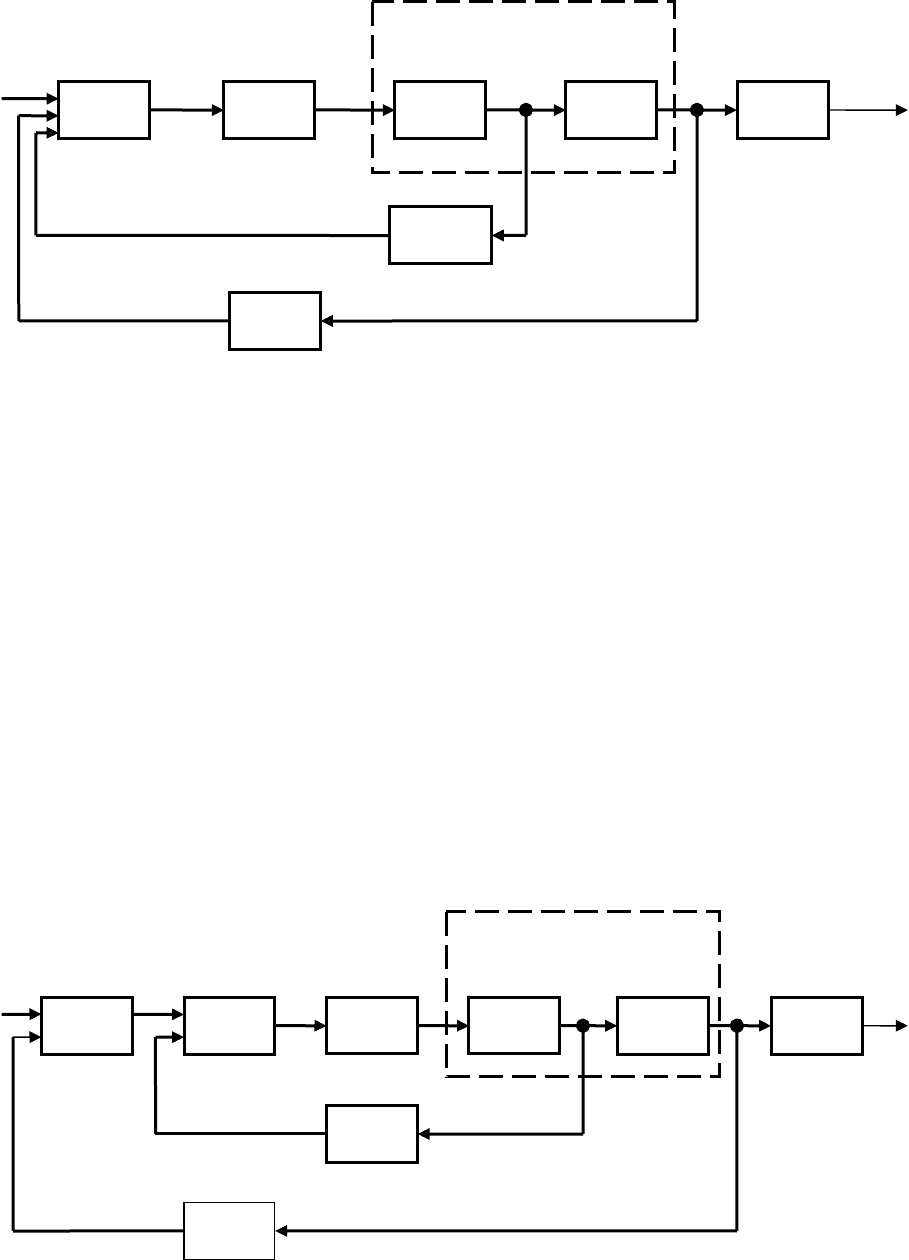
Рис. 3.6. Схема электропривода с общим усилителем
обратных связей по току
U
ос I
и скорости U
ос Ω
подаются на вход
управляющего устройства
УУ вместе с задающим сигналом U
зс
. Схема
проста, но не позволяет регулировать координаты электропривода
независимо друг от друга.
На рис. 3.7 представлена структурная схема электропривода с
подчиненным регулированием, где внутренний контур
ОС по току с
регулятором тока
РТ подчинён внешнему контуру ОС по скорости с
регулятором скорости
РС. Достоинство таких схем заключается в
возможности оптимальной настройки регулирования каждой координаты в
отдельности. Если требуется регулировать координату положения, то надо
ввести дополнительный контур.
Рис. 3.7. Схема электропривода с подчинённым регулированием координат
U
ос
Ω
U
Ω
р
м
U
зс
Ω U
∆
U
ос
I
k
ос
I
Э
Д
УУ
Э
Д
Э Э
Д
М МПУ
I
k
ос
Ω
ЭПУ
Ω
U U
∆
U
зс
Ω
р
м
РС
Э
Д
Э
ЭДМ
МПУ
РТ
ЭПУ
U
з I
ЭД
I
U
ос
Ω
U
о
с
I
k
ос
I
k
ос
Ω
21

Лекция 4
Электрическая часть силового канала электропривода
Электрическая часть силового канала состоит из электродвигателя
ЭД и электрического преобразовательного устройства ЭПУ (рис 4.1).
ЭД
ЭПУ
Рис. 4.1. Структурная схема электрической части силового канала
электропривода
Силовой канал электрической части может быть, как вращающийся,
например, в системе "генератор - двигатель" для регулирования
напряжения машин постоянного тока, так и статический, например, в
системе "выпрямитель
- двигатель". Если напряжение не регулируется, то
выпрямитель может быть неуправляемый, а при его регулировании
используется управляемый выпрямитель. В машинах переменного тока,
кроме напряжения, требуется изменение и частоты, поэтому в них
используются инверторы, преобразователи напряжения и частоты и т. д.
Недостатком вращающегося силового канала является увеличение в
несколько раз установленной мощности
системы, низкий КПД,
инерционность процесса регулирования скорости, шум при работе. В связи
с этим всё большее распространение стали находить статические системы
силового канала.
Система ЭПУ - ЭД с машинами постоянного тока
Для регулирования координаты скорости в электроприводах с
машинами постоянного тока, как известно, необходимо изменить величину
магнитного потока, добавочного сопротивления в цепи якоря или
напряжения якоря. Регулирование напряжения также широко используется
для изменения любых координат электропривода. Поскольку основным
источником питания электропривода служит сеть переменного тока, то
регулирование напряжения якоря производится с
помощью управляемого
выпрямителя. Основным типом преобразователей системы "управляемый
выпрямитель – двигатель" (УВ – Д), применяемых в настоящее время в
электроприводах постоянного тока, являются полупроводниковые
статические преобразователи. Это могут быть выпрямители как:
1.
Мостовые схемы или с нулевой точкой.
2.
Реверсивные или нереверсивные.
3.
Однофазные и трёхфазные.
22
Ра реверсивный двухполупериодный
тир сте
.
ание напряжения на двигателе
при
ссмотрим однофазный не
исторный выпрямитель си мы, собранный по нулевой схеме,
представленный на рис. 4.2
а Управляемый выпрямитель включает в себя
согласующий трансформатор
Т, имеющий две вторичные обмотки, два
тиристора
VS1 и VS2, сглаживающий реактор с индуктивностью L и
систему импульсно – фазового управления СИФУ. Обмотка возбуждения
двигателя питается от своего источника.
Выпрямитель обеспечивает регулиров
изменении среднего значения выпрямленной ЭДС
Е
ср
= Е
ср 0
cos α
изменением с помощью СИФУ по сигналу
U
у
угла управления
тиристорами
α (рис. 4.3). При α = 0 или α = 180
0
на якорь двигателя
подаётся полное напряжение, а при других значениях – пониженное.
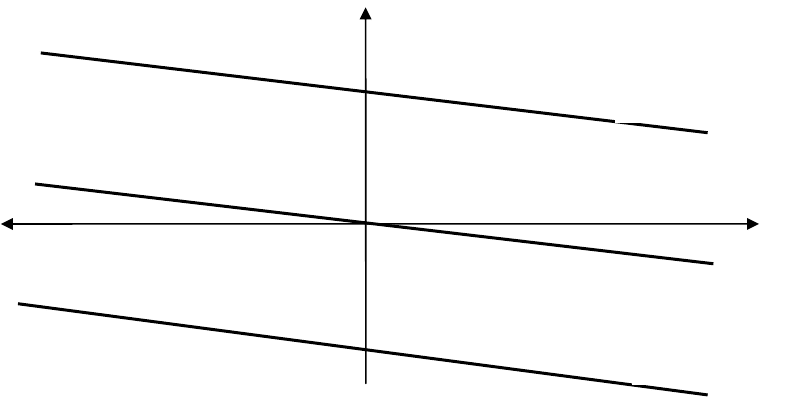
Электромеханические и механические характеристики двигателя в системе
ТРП – Д представлены на рис. 4.2 б, а их уравнения имеют вид
,
)Фk(
)RR(M
Фk
cosE
;
Фk
)RR(I
Фk
cosE
2
пL
0ср
пL
0ср
+
−
α
=Ω
+
−
α
=Ω
где R
п
– эквивалентное сопротивление преобразователя; R
L
– активное
ёта индуктивности нагрузки, а её
н и и ю
в режиме
. Пр
ристики имеет трёхфазный мостовой
при использовании однофазного выпрямителя (рис. 4.5).
сопротивление сглаживающего реактора.
Кривые на рис. 4.3 построены без уч
наличие изменяет характер процесса в выпрямителе. После открывания
тиристоров
VS1 и VS2 ток в нём и в цепи нагрузки плавно увеличивается
и в магнитном поле индуктивности запасается энергия. За счёт этой
энергии ток в соответствующем тиристоре и в цепи нагрузке не
уменьшается до уля при изменении полярност п та щего напряжения.
Следовательно, интервалы открытого состояния тиристоров возрастут
тем больше, чем больше индуктивность. При некотором
значении
индуктивности ток в цепи нагрузки становится непрерывным.
Заштрихованная область определяет работу двигателя
прерывистого тока, что уменьшает жёсткость характеристик. Из – за
односторонней проводимости преобразователя характеристики
располагаются только в первом и четвёртом квадрантах и
α = 90
0
ЭДС
управляемого выпрямителя равна нулю и двигатель работает в режиме
динамического торможения.
Аналогичные характе
нереверсивный управляемый выпрямитель, представленный на рис. 4.4.
Пульсации тока в цепи якоря при использовании такой схемы меньше, чем
23

U
α
+
–
Т
~ u
c
Рис. 4.2. Система УВ – Д с однофазным нереверсивным
двухполупериодным выпрямителем и характеристики двигателя
Рис. 4.3
М
ОВМ
VS2 VS1
L I
СИФУ
U
у
I, M
Ω
0
б
)
α = 0
0
α = 30
0
α = 60
0
α = 1
а
)
20
0
α = 150
0
α = 180
0
α = 90
0
u
1
u
2
α
Е
ср
u
c
0
t
e
Е
ср 0
u
u
1
u
2
0
t
24
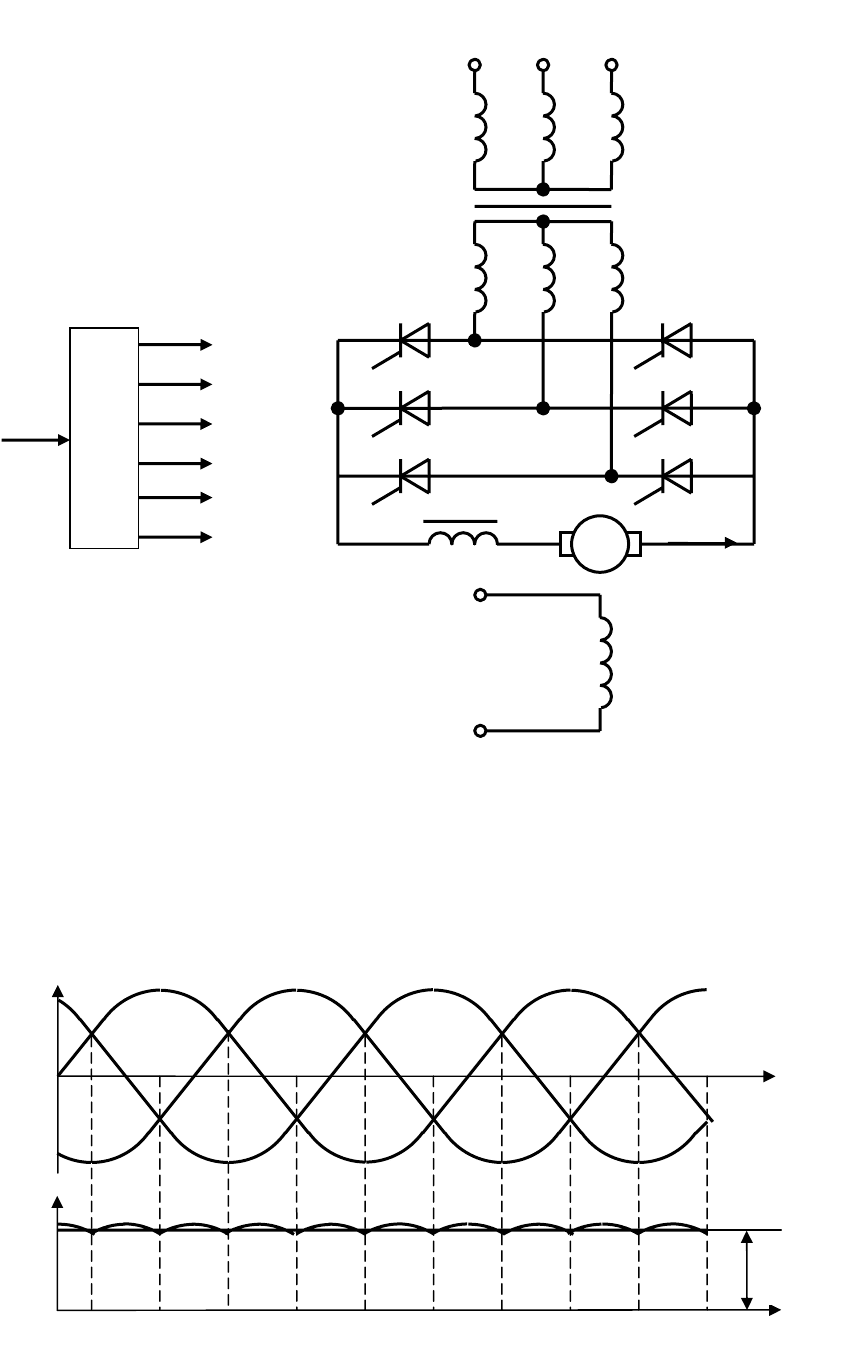
Рис. 4.4. Система ТРП – Д с трёхфазным нереверсивным мостовым
выпрямителем
Рис. 4.5
I
L
3 ~
–
U
у
U
α
VS5
VS2
VS4
VS3
С
М
VS6
VS1
VS2
И
VS3
Ф
VS4
У
VS5
VS6
VS1
ОВ
Д
+
u
0
t
u
a
u
c
u
b
t
0
Е
0
0
e
25
Для получения характеристик двигателя во всей четырёх квадрантах
.
а
ый реверсивный управляемый
L е
в
п в м
)
ричной обмотки трансформатора и
ыпря
Рис. 4.6
(рис 4.6) используются реверсивные управляемые преобразователи.
Получить характеристики в четырёх квадрантах можно также и при
использовании нереверсивного преобразователя счёт изменения
направления ток возбуждения двигателя.
На рис. 4.7 представлен трехфазн
выпрямитель с нулевым выводом, состоящий из двух нереверсивных
выпрямителей. В нём используются
два основных принципа управления
этими выпрямителями:
совместное и раздельное. Совместное управление
предусматривает подачу импульсов управления от СИФУ одновременно
на тиристоры обоих комплектов – VS1, VS3, VS5 (катодная группа) с
углом регулирования
α1 и VS2, VS4, VS6 (анодная группа) с углом
регулирования
α2. При этом за счёт наличия угла сдвига между
импульсами управления тиристорами двух групп, близкого к
π, одна из
них работает в выпрямительном режиме, и ток проводит, а другая группа
не проводит. За счёт разности мгновенных значений ЭДС между группами
тиристоров протекает уравнительный ток, и для его ограничения
используются уравнительные реакторы L1 и 2. Раздельно управление
используется для полого исключения уравнительных токов между
группами реверсивного управляемого ыпрямителя. В этом случае
импульсы одаются только на одну из групп, которая данный омент
проводить ток. На другую группу импульсы не подаются, и она не
работает (тиристоры закрыты .
Кривые напряжения вто
в мленной ЭДС при подаче полного напряжения на двигатель
показаны на рис. 4.8.
M
,
I
0
α
1
= π / 2
α
2
= π / 2
α
2 max
α
2 min
Ω
α
max
α
min1
1
26

Рис. 4.7. Система ТРП – Д с трёхфазным реверсивным мостовым
выпрямителем с нулевым выводом
Рис. 4.8
E
0
t
u
0
t
u
a
u
c
u
b
e
0
0
L2 L1
3 ~
–
U
у
U
α
VS5
VS2
VS4
VS3
С
М
VS6
VS1
VS2
И
VS3
Ф
VS4
У
VS5
VS6
VS1
ОВ
Д
+
L
I
27
Система ЭПУ - Э хронными машинами
ак же, как и в машинах постоянного тока, система ЭПУ – АД может
быть
п в
ена нереверсивная система ТРН – АД и
механ
характеристики асинхронного двигателя
Д с асин
Т
управляемой и неуправляемой, реверсивной или нереверсивной. При
регулировании координаты скорости в асинхронных машинах, как было
показано выше, применяют частотное регулирование, изменяют
подводимое напряжение, число ар полюсо , а в двигателях с фазным
ротором можно ещё изменять и сопротивление в
цепи ротора. В ЭПУ с
регулируемым напряжением на статоре могут быть использованы
различные электромеханические устройства, а также тиристорный
регулятор напряжения ТРН.
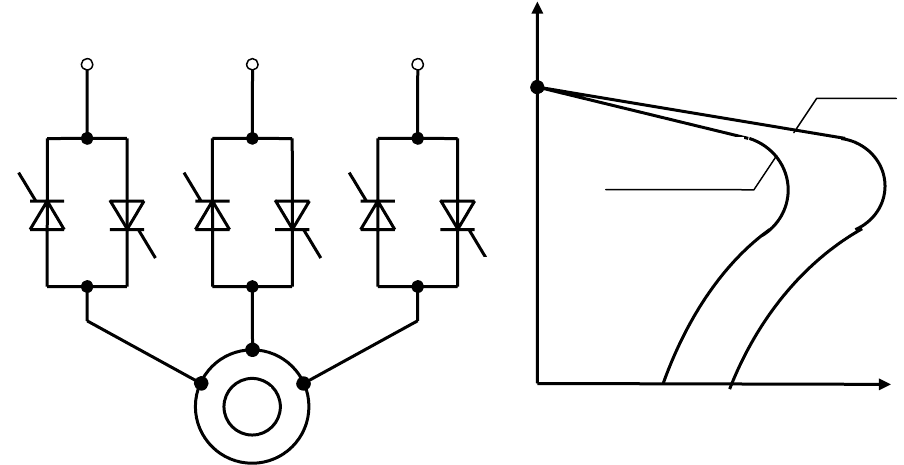
На рис. 4.9 представл
ические характеристики асинхронного двигателя при различных
величинах напряжения питающей сети
U
сети
. Здесь силовая часть одной
фазы образована двумя тиристорами, собранными по
встречно –
параллельной
схеме, которая обеспечивает протекание тока в оба
полупериода напряжения сети. Тиристоры получают импульсы управления
U
α
от СИФУ, которая обеспечивает их сдвиг на угол управления α в
функции внешнего сигнала управления
U
у
. Изменяя с помощью СИФУ
угол
α в пределах от 0 до π, можно регулировать напряжение от
максимальной величины до нуля. На рис. 17.10 показано регулирование
напряжения для одной фазы обмотки статора, где приведена первая
гармоническая напряжения
ν = 1.
Рис. 4.9. Нереверсивная трёхфазная система ТРН – АД и механические
C
1
0
C
3
C
2
М
M
Ω
U < U
ном
U
ном
VS4
Ω
1
VS1
VS2
VS3
VS6
VS5
~ U
сети
28

Рис. 4.10
Для осуществления ревер няется пять пар встречно –
араллельно включённых тиристоров (рис. 4.11).
са приме
п
Рис. 4.11. Реверсивная трёхфазная система ТРН – АД
~ U
сети
C
1
C
3
C
2
М
VS4
VS1
VS2
VS3
VS6
VS5
VS8
VS7
VS10
VS9
1
2 3
4
5
u
ν
= 1
рег
α
u
cети
0
t
u
u
u
рег
t
0
29