Подождите немного. Документ загружается.

}
}
∆
tr(t + )
r∆∆
t
∆
t
r
v
==
dr
dt
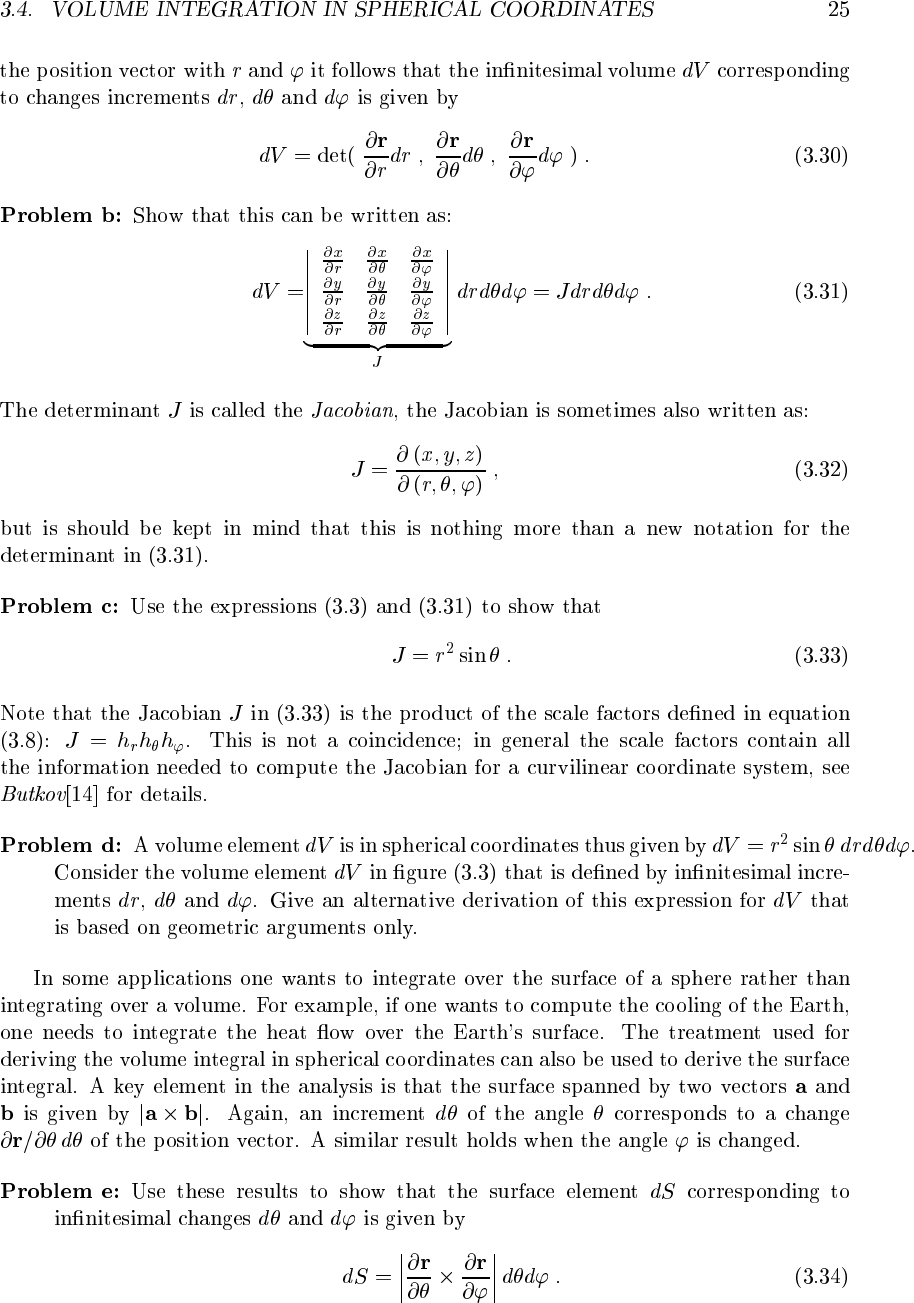
x-axis
y-axis
z-axis
r(t)
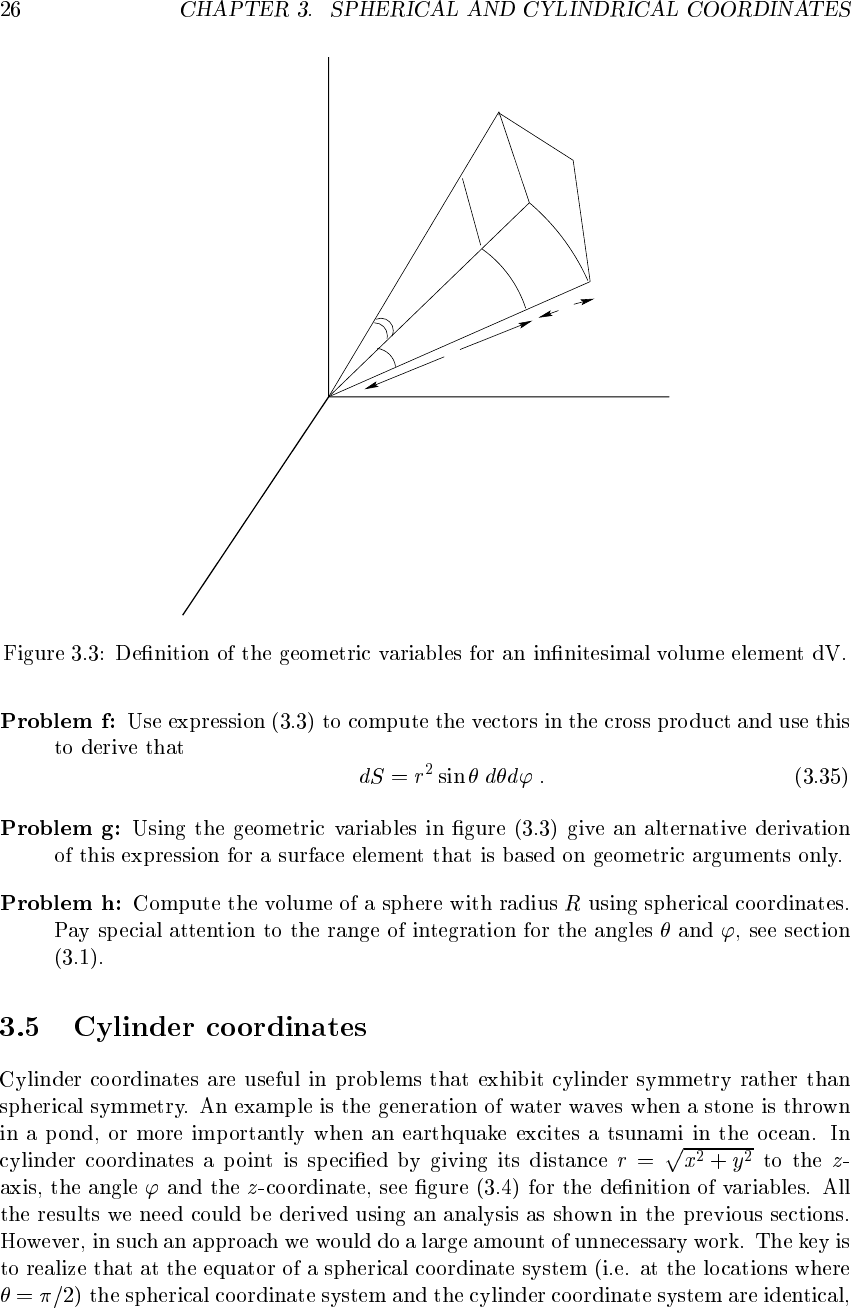
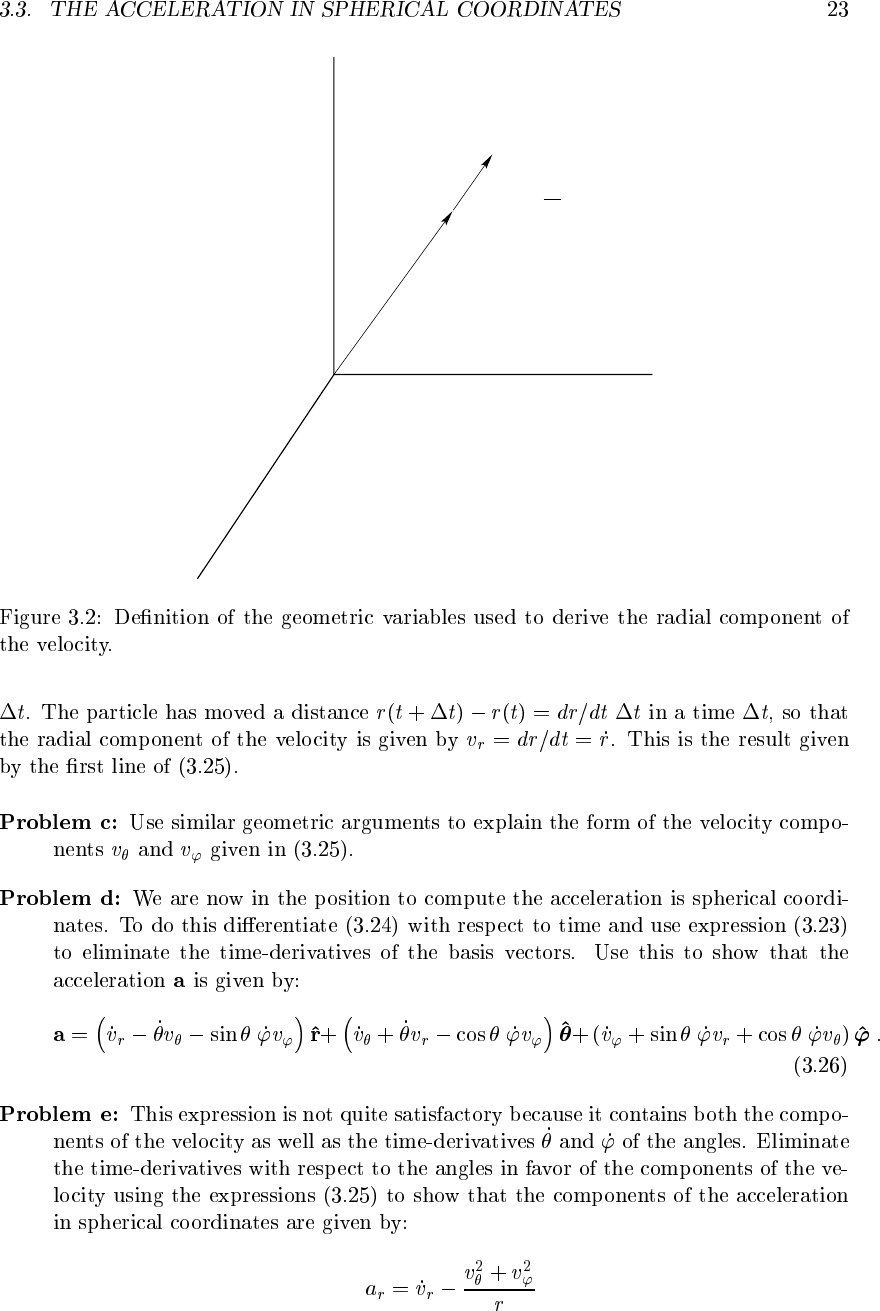
d
ϕ
dθ
x-axis
y-axis
z-axis
dr
r
x-axis
y-axis
z-axis
(x, y, z)
z
ϕ
.
.
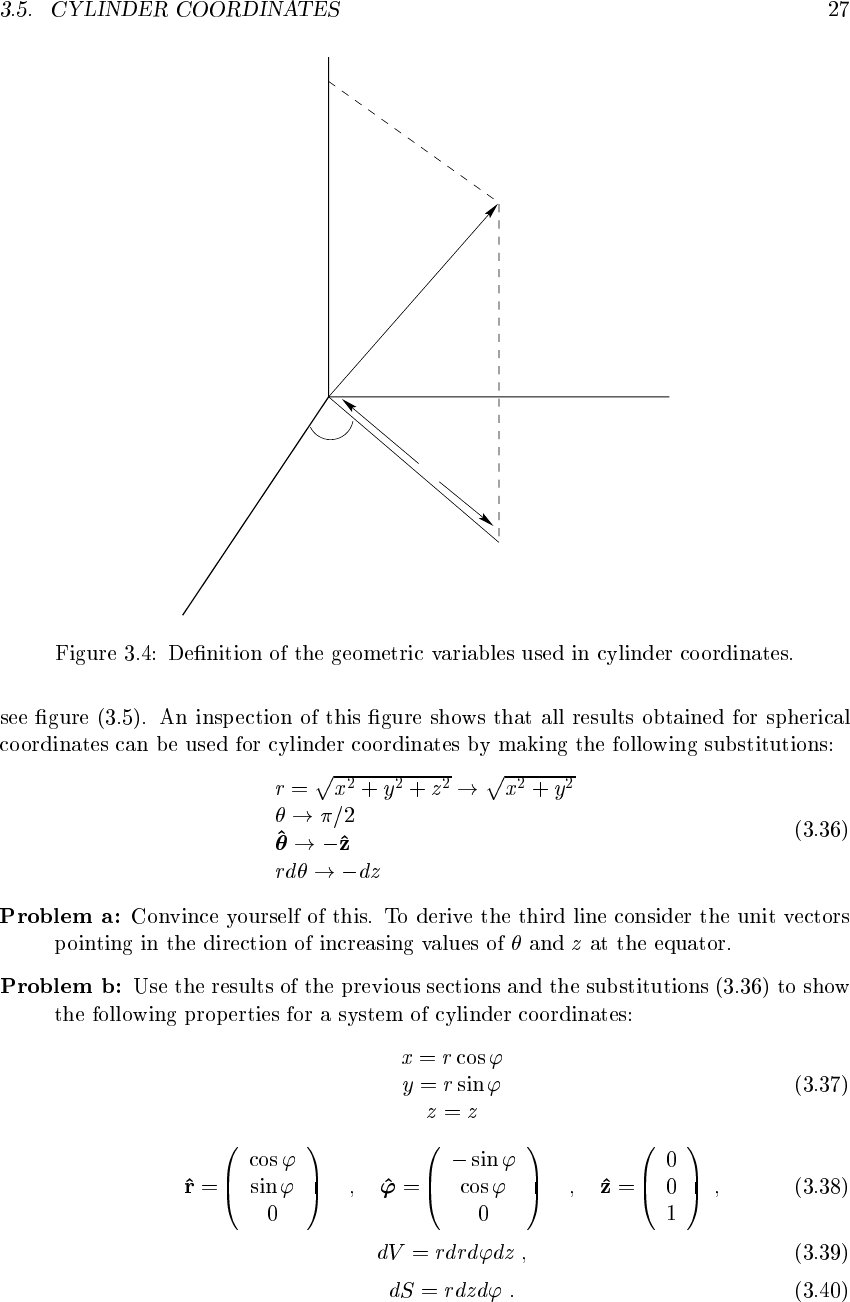
r
22
x + y = constant
2
constant
22
x + y + z =
θ = π
2
x-axis
y-axis
z-axis