Troyan V., Kiselev Y. Statistical Methods of Geophysical Data Processing
Подождите немного. Документ загружается.

Methods for parameter estimation 183
So, we find the matrices Γ for three estimation procedures: “usual” LSM, when
the parameter
θ
θ is unknown and nonrandom
Γ
ii
= γ
i
=
1
σ
i
, i = 1, . . . , S;
the method of statistical regularization for a model with a random parameter vector
Γ
ii
= γ
i
=
σ
i
σ
2
i
+ σ
2
ε
/σ
2
θ
, i = 1, . . . , S;
the method of singular analysis
γ
j
=
1/σ
j
, j = 1, 2, . . . , i
0
σ
i
0
≥ α,
0, j = i
0
+ 1, . . . , S σ
i
0
+1
< α.
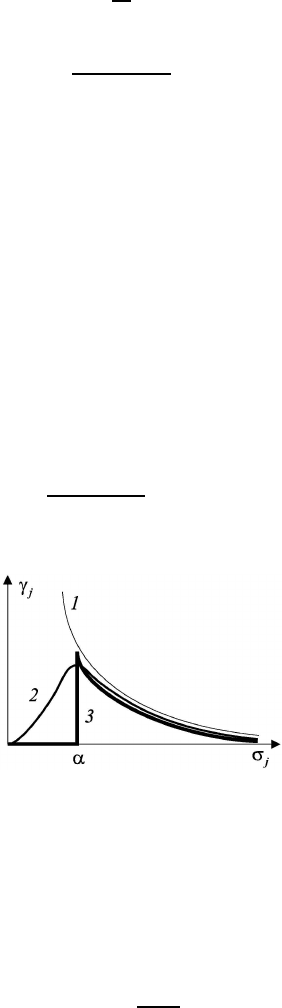
At the small singular numbers σ
i
in comparison with the ratio σ
ε
/σ
θ
(σ
i
σ
ε
/σ
θ
), for the “usual” LSM (the first procedure), corresponding value γ
i
goes up
fast, and it leads to the instability of the solution. In the cases of the statistical
regularization (the second procedure) and the singular analysis (the third procedure)
γ
i
≈ 0 and γ
i
= 0 are valid correspondingly. At a great value of σ
i
(σ
i
σ
ε
/σ
θ
)
all three methods lead to the same result.
It is necessary to point out, that the singular analysis is one of the expedients
of the regularization of the solution, and the basic difference from the estimates
obtained by the statistical regularization in a range of great values of σ
i
, but a little
bit larger than σ
ε
/σ
θ
, is the next: γ
i
= 0 for the singular analysis and it decreases
smoothly as
γ
i
=
σ
i
σ
2
i
+ σ
2
ε
/σ
2
θ
, i = 1, . . . , S,
for the statistical regularization method (Fig. 6.1). The important result of this sec-
Fig. 6.1 Dependence of the elements of matrix Γ (6.54) on eigenvalues σ
j
(6.49) for an estimation
by the methods: LSM (1), statistical regularization (2), singular analysis (3).
tion consists in establishing the connection between the threshold value α, specifying
in the singular analysis using a priori data, and the noise-to-signal ratio (σ
ε
/σ
θ
),
which one is customary for an interpreter and has an explicit physical sense.
The condition measure β, introduced above, can be expressed through the min-
imum and maximum singular numbers
β =
σ
max
σ
min
.
184 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
As it was mentioned, the value β can be used as a measure of the linear de-
pendence of columns of the matrix ψ
T
ψ. If the value of β is close to 1, then the
columns are “practically independent”. If β is sufficiently great, then the columns
are “practically dependent”. Introducing the threshold value α reduces the con-
dition number β up to σ
max
/α, that leads to a more stable determination of the
desired parameters.
6.12.1 Resolution matrix
Let us to consider an additive model
u
u = ψθ +
ε
ε. (6.55)
We introduce the matrix L, which is an “inverse” matrix with respect to the matrix
ψ and it defines a “rule” of the derivation of the estimate
ˆ
θ
θ
θ of the vector
θ
θ using
the vector of measured data u,
ˆ
θ = Lu.
To define the resolution matrix R as a product of L and ψ
R = Lψ.
For clearing up of a sense of the resolution matrix, we multiply the left hand side
and the right hand side of the equation (6.55) by the matrix L. At tending the
values of the additive noise addend εε to zero, we obtain
ˆ
θθ
ε→0
−→ Rθ.
In case of the solution of the system of the linear equations (6.55) by LSM, the
resolution matrix is an identity matrix:
L = (ψ
T
ψ)
−1
ψ
T
, R = Lψ = I.
In case of the singular decomposition (6.48) of the matrix ψ, we obtain:
R = P Σ
+
Q
T
QΣP
T
= P P
T
= I.
6.13 The Method of Least Modulus
Together with the LSM method, for processing of the geophysical data, the method
of the least modulus is widespread. This method leads to the optimum estimates
of parameters at presence in a random noise of the outliers. With the reference to
the linear model (6.15) the method of least modulus is reduced to the minimization
of the function
λ(
θ
θ) =
n
X
i=1
v
i
|u
i
−
S
X
s=1
ψ
is
θ
s
|,
ˆ
θ
θ = arg min
θθ
n
X
i=1
v
i
|u
i
−
S
X
s=1
ψ
is
θ
s
|. (6.56)
Methods for parameter estimation 185
Let us note, that the method of least modulus is a special case of the maximum
likelihood method with the Laplace distribution of the random parameter vector ε.
The “tails” of the Laplace distribution fall slowly, than the “tails” of the Gaussian
distribution. At the method of least squares the weight multipliers v
j
have a clear
physical sense, they are in inverse proportion to the standard deviations of the
measurements.
To find a minimum of the function λ(θ) two approaches can be used. The first
approach is based on the linear-programming technique. The second one is the
iterative procedure based on the weighted LSM.
Let us consider the second approach in detail.
We introduce a function of two vector arguments θ
θ
θ and ρ
ρ
ρ
λ
1
(θ, ρ) =
n
X
i=1
v
2
i
|u
i
−
S
P
s=1
ψ
is
θ
s
|
2
v
i
|u
i
−
S
P
s=1
ψ
is
ρ
s
|
. (6.57)
If θθ = ρ, then the function (6.57) transforms to the function (6.56):
λ
1
(
θ
θ, θ
θ
θ) = λ(θ
θ
θ).
The presentation (6.56) enables to create an iterative procedure for finding an esti-
mate by the method of least modulus. Let’s an initial approximation for the desired
parameter vector θ
(0)
is given. We substitute the value of θ
(0)
to the expression
(6.57) instead of the vector ρ, then
λ
1
(
θ
θ, θ
(0)
) =
n
X
i=1
v
i
|u
i
−
S
P
s=1
ψ
is
θ
s
|
2
|u
i
−
S
P
s=1
ψ
is
θ
(0)
s
|
, (6.58)
or, introducing the notation
w
0
i
=
v
i
|u
i
−
S
P
s=1
ψ
is
θ
(0)
s
|
, (6.59)
we obtain
λ
1
(θθ, θ
(0)
) =
n
X
i=1
w
(0)
i
|u
i
−
S
X
s=1
ψ
is
θ
s
|. (6.60)
The quadratic form of (6.58), (6.60) explicitly corresponds to the quadratic form of
LSM. The estimate of the desired parameter vector is determined by
ˆ
θ
θ = (ψ
T
W
(0)
ψ)
−1
ψ
T
W
(0)
u
u, (6.61)
where W
(0)
= diag(w
0
1
, w
0
2
, . . . , w
0
n
).

186 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
Let’s accept the estimate (6.61) as the first approximation of the estimate for
the least modulus method:
θθ
(1)
=
ˆ
θ,
and to use it for computing the new weight multipliers. To substitute the obtained
estimate to the expression (6.57) instead of
ρ
ρ:
λ
1
(
θ
θ, θ
(1)
) =
n
X
i=1
w
(1)
i
(u
i
−
S
X
s=1
ψ
is
θ
s
)
2
, (6.62)
where
w
(1)
i
=
v
i
|u
i
−
S
P
s=1
ψ
is
θ
(1)
s
|
.
Further, the LSM estimate we find by minimizing of the quadratic form (6.62)
ˆ
θ
θ = (ψ
T
W
(1)
ψ)
−1
ψ
T
W
(1)
u
u.
We accept this estimate as the second approximation of the estimate for the least
modulus method:
θθ
(2)
=
ˆ
θ.
Substituting θ
(2)
to the expression (6.57) instead of θ we find θ
(3)
. The iterative
procedure continues until at k-th step the threshold condition
|θ
(k)
s
− θ
(k−1)
s
|
|θ
(k)
s
|
< δ ∼ 10
−2
÷ 10
−3
is satisfied. Usually the value of δ is a order of 10
−2
–10
−3
.
The main element of the considered procedure is LSM. At each step we make
correction of the weights W
i
in accordance with the LSM estimate obtained at the
previous step.
6.14 Robust Methods of Estimation
Most of the considered estimation algorithms were based on the assumption of
the normal distribution of the random vector ε
ε
ε. If this assumption is not valid,
then estimates obtained by LSM lose the optimality. Besides the LSM estimates
are sensitive to the great errors of observations. Therefore, the creation of the
algorithms, which are stable at deviations from the initial assumptions about the
model, is an actual problem. In mathematical statistics the methods of estimation,
which are stable against the deviations of the supposed distributions of the random
components from a true model are designed. These methods are called the robust
methods. Three robust algorithms will be considered below.
Methods for parameter estimation 187
6.14.1 Reparametrization algorithm
Let us consider the robust estimation algorithm for the parameter vector θθ using
the model (6.15), and based on the reparametrization of an initial model (Meshalkin
and Kurochkina, 1981). As the result of the reparametrization, the new parameters
appear as the stable ones in wide class of the noise at a deviation of their distribution
from the normal distribution. The estimation procedure looks like the next.
(1) To set an initial approach for the parameter vector θ and a variance σ
2
0
. As the
vector
θ
θ
0
an LSM estimate can be used. The variance can be estimated by the formula
σ
2
0
=
(u − ψθθ
0
)
T
(u − ψ
0
0
θ
0
)
n − S
.
(2) In k-th iteration we compute the deviation
e
i
= u
i
−ψψ
T
i
ˆ
θ
(k)
,
where ψ
T
i
is i-th row of the matrix. To determine the weight function
w(ε
i
) = exp
−
ε
2
i
η
2ˆσ
2
k
.
At that we should determine a value of the constant η, which determines a width
of the weight bell-shaped function. Such value may choose by an experimental
determination. With the reference to the processing of geophysical data, this
value is advisable to put η = 0.2.
(3) To find the estimate
ˆ
θ by minimizing of the quadratic form:
λ(θθ) =
n
X
j=1
(u
j
− ψ
T
j
θ)
2
w(e
j
),
ˆ
θ = (ψ
T
W ψ)
−1
ψ
T
W
u
u,
where W = diag(w
1
, w
2
, . . . , w
n
).
(4) To calculate the normalized weighted deviation
Y =
λ(θ)
n
P
i=1
(ε
i
)
.
(5) To find the estimate
ˆ
θ
k+1
and dispersion ˆσ
2
k+1
using the equation
ˆ
θ
θ
k+1
=
ˆ
θθ
k
Y
−1
ˆσ
2
k
(
ˆ
θθ −
ˆ
θθ
k
), (
ˆ
σσ
2
k+1
)
−1
= Y −
η
ˆσ
2
k
.
(6) If the difference between the estimates obtained on k-th and (k+1)-th iterations
have an inessential difference, i.e.
max
µ
ˆ
θ
µ
k+1
−
ˆ
θ
µ
k
ˆ
θ
µ
k
≤ δ
1
,
ˆσ
µ
k+1
− ˆσ
µ
k
ˆσ
µ
k
≤ δ
2
,
where δ
1
and δ
2
are the constants of order 10
−2
–10
−3
, then
θ
θ
k
, σ
2
k
are the
desired estimates, otherwise the iterative procedure will be repeated, starting
from the point 2. As it is shown by the numerical simulation, it needs 7–10
iterations.
188 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
(7) The covariance matrix of the estimates of the desired parameters is determined
by the formula
R
ˆ
θ
k
= (ψ
T
W ψ)
−1
ˆσ
2
k
.
Described algorithm may easily be realized on a computer, because its basic
element is the weighted LSM procedure.
Let us consider two robust nonlinear estimators.
6.14.2 Huber robust method
Let’s the random components ε
i
in the model (6.15) are independent and equally
distributed with a symmetric density function. If the probability of a great outlier
is equal to α, then
p(n) = (1 − α)X(e) + αZ(e),
where the supposed distribution X(n) and “weed” Z(e) are the symmetric densities:
X(e) = 1 − X(−e), Z(e) = 1 − Z(−e).
Assuming that the random components have the normal distribution, we come
to a model of the crude errors, which can be applied to the static correction at
processing of seismic data. In that case instead of minimizing of a quadratic form,
for the determination of the parameter vector θθ, it is proposed to solve the next
problem (Huber, 2004):
ˆ
θ
θ
θ = arg min
θ
n
X
i=1
H(u
i
−ψ
ψ
ψ
T
i
θ
θ), (6.63)
where H is the correspondingly chosen function.
In the general case the solution of the problem (6.63) reduces to the system of
nonlinear equations
n
X
i=1
h(u
i
− ψ
T
i
θθ)ψ
is
= 0,
where s = 1, 2, . . . , S, h(ε) = H
0
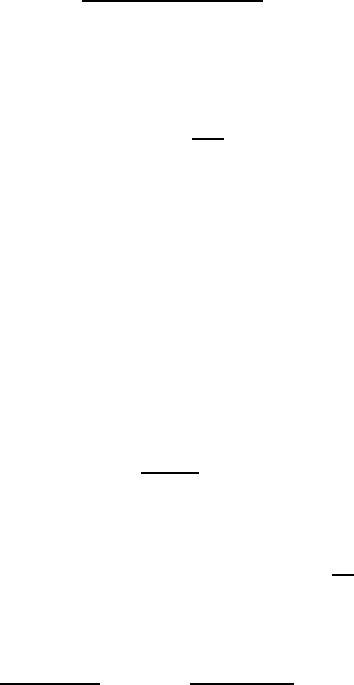
(ε). As the function H we can choose the next
function (Fig. 6.2)
H(ε) =
ε
2
/2, |ε| < c,
c|ε| − c
2
/2, |ε| ≥ c.
Methods for parameter estimation 189
Fig. 6.2 Huber’s proximity function between measured data and model data.
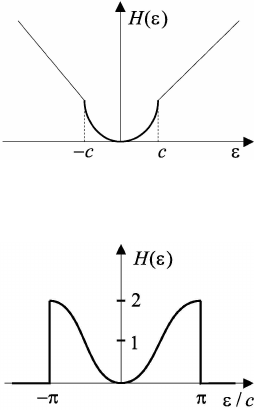
Fig. 6.3 The proximity function between measured data and model data.
6.14.3 Andrews robust method
Let us consider one more robust estimator (Andrews, 1974) where the weighted LSM
method appears as a basic element. To find the estimate of the model parameters
by minimizing the next nonlinear function:
ˆ
θ
θ = arg min
n
X
i=1
H(u
i
− ψ
T
i
θ), (6.64)
where
H(ε) =
1 − cos(ε
i
/c), |ε
i
| < cπ,
0, |ε
i
| ≥ cπ,
(see Fig. 6.3). As the estimate ˆσ we accept a median of the absolute values:
ˆσ = med |u
i
− ψ
T
i
θ|.
The problem (6.64) leads to the system of linear equations
n
X
i=1
h(ε
i
)ψ
is
= 0, s = 1, . . . , S, (6.65)
h(ε
i
) = H
0
(ε
i
) =
sin(ε
i
/c)/c, |ε
i
| < cπ,
0, |ε
i
| ≥ cπ.
The solution of the system of linear equations using the iterative procedure leads
to the next steps.

190 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
(1) To establish the initial vector θ
θ
θ
0
or to use for its determination LSM.
Let us consider the estimator of
ˆ
θ
θ
θ
k+1
, if the estimates
ˆ
θ
θ
k
, k = 0, 1, . . . are
known.
(2) To calculate the deviation ˆε
ik
= u
i
− ψ
i
ˆ
θ
k
.
(3) To find the estimate ˆσ
k
= med ˆε
ik
.
(4) To calculate the weight function
w
ik
=
[sin(ˆε
ik
/c)/c][ˆε
ik
]
−1
, |ε
ik
|/c < π,
0, |ε
ik
|/c ≥ π.
(5) To solve the system of equations (6.65), which can be represented in the form
n
X
i=1
w
ik
ψ
is
ε
ik
= 0.
n
X
i=1
w
ik
ψ
is
(u
i
− ψ
T
i
θ
(k+1)
) = 0.
Using the weighted LSM to obtain the estimate
ˆ
θ
θ
k+1
= (ψ
T
W
k
ψ)
−1
ψ
T
W
k
u,
where W = diag(w
1
, w
2
, . . . w
n
).
(6) To check an accuracy of the obtained estimates
max
S
|
ˆ
θ
sk+1
−
ˆ
θ
sk
|
|
ˆ
θ
sk
|
≤ δ
1
,
|ˆσ
k+1
− ˆσ
k
|
|ˆσ
k
|
≤ δ
2
,
where δ
1
and δ
2
are the values of the order 10
−2
–10
−3
. If the inequalities are
satisfied, then θ
θ
θ
k
and ˆσ
k
are the desired estimates. If not, we continue the
procedure from the point 2. For the case of the real data the recommended
value of c is 1,5.
The essential difference of this method from the reparametrization algorithm is
that for a great deviation the value of the weight function puts to zero.
6.15 Interval Estimation
We have considered some examples of the point estimation. In practice the interval
estimation, which is intimately connected with the point estimation, is widespread
as well. The interval estimation gives not only a numerical value of parameters,
but also it produces an accuracy and reliability of the estimation. So, for example,
at treating experimental data the great interest is introduced by a problem of the
definition of an interval, in which one the true value of parameter lays with the
given probability. The problems of a such type are solved by the interval estimation
method.
Methods for parameter estimation 191
Let’s the estimate
ˆ
θ is unbiased estimate of the parameter θ. To establish enough
great probability β (β = 0.9, . . . , 0.95), we find an admissible deviation value δ of
ˆ
θ
and θ:
P (|
ˆ
θ − θ| < δ) = β, (6.66)
Moreover, the deviations exceeding on an absolute value of δ, occur with the small
probability 1 −β. The expression (6.66) can be represented as
P (
ˆ
θ − δ < θ <
ˆ
θ + δ) = β. (6.67)
This inequality yields that with the probability β the random interval I
β
= [
ˆ
θ −
δ,
ˆ
θ + δ] covers a true value of the parameter (Fig. 6.4). The probability β is usually
Fig. 6.4 The confidence interval I
β
and estimated parameter
ˆ
θ.
called the confidence probability,, and the random interval [
ˆ
θ − δ,
ˆ
θ + δ] is called
the confidence interval. As it follows from the expression (6.67), to determine the
confidence interval it is necessary to know a probability distribution of the estimate.
As it was already mentioned, in the case of the normal distribution an error vector
of the estimates obtained by LSM in case of the linear model (6.15) have the normal
distribution, i.e.
h
ˆ
θ
s
i = θ
s
, R
ˆ
θ
s
= σ
2
ε
[(ψ
T
W ψ)
−1
]
ss
s = 1, 2, . . . , S.
Each component of the estimating parameter vector
ˆ
θ
s
has the normal distribution
with the mathematical expectation θ
s
and the variance σ
2
ε
[(ψ
T
ψ)
−1
]
ss
:
ˆ
θ
s
− θ
s
σ
ε
[(ψ
T
W ψ)
−1
]
1/2
ss
∈ N (0, 1). (6.68)
To introduce the deviation vector
ˆε
ε =
u
u−ψ
ˆ
θ
θ and the quadratic form of deviation
ˆ
εε
T
W
ˆε
ε. The random vector
ˆ
θ is S-dimensional normal vector, and the random vector
ˆ
εε is (n−S)-dimensional normal vector. These vectors are independent. The random
value
1
σ
2
ˆε
ε
T
W
ˆ
ε
ε
ε (6.69)
has the distribution χ
2
n−S
and does not dependent on
ˆ
θ.
Using the relations (6.68) and (6.69), to build the variable
t
n−s
=
ˆ
θ
s
− θ
s
[(ψ
T
W ψ)
−1
]
1/2
h
ˆ
εε
T
W
ˆ
εε/(n − S)
i
1/2
=
ˆ
θ
s
− θ
s
h
(ψ
T
W ψ)
−1
ˆ
ε
T
W
ˆ
ε/(n − S)
i
1/2
,
192 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
which is a ratio of a random variable with the normal distribution (N(0, 1)) and a
sum of squared normally distributed variables with a number of degrees of freedom
n − S. Such variable has the Student’s distribution with a number of degrees of
freedom n − S and it enables to create the confidence interval for θ
s
.
To specify the confidence probability β. For given dimensions of the observed
data vector and the desired parameter vector S to determine a number of degrees of
freedom k = n − S. The values of k and β are an input data for the determination
of γ, such that
P [|t
n−S
| ≤ γ] = β.
The confidence interval with the confidence probability β describes by the formula
I
β
=
"
ˆ
θ
s
± γ[(ψ
T
W ψ)
−1
]
1/2
ss
ˆ
εε
T
W
ˆ
εε
n − S
1/2
#
,
or, taking into account, that
ˆσ
ε
=
ˆ
ε
T
W
ˆ
ε
n − S
, ˆσ
θ
s
= ˆσ
ε
[(ψ
T
W ψ)
−1
]
ss
,
we obtain
I
β
= [
ˆ
θ
s
± γˆσ
θ
s
]. (6.70)
From an analysis of the formula (6.70) follows that the confidence interval de-
termines both the confidence probability and an accuracy of the estimate. Together
with the interval estimations of the parameters, a practical importance possesses es-
timation of the confidence bounds for an approximated function. Let’s deterministic
component of a model with a true parameter vector is written as
ff = ψθθ, (6.71)
where the estimate of the function f, obtained by the substitution to the right hand
side of equality (6.71) the LSM estimate of the vector
θ
θ, can be written as
ˆ
ff = ψ
ˆ
θθ.
Let’s note, that
ˆ
ff does not depend on
ˆ
ε
T
W
ˆ
ε. To define the function t
n−S
as a
ratio of the variable
ˆ
f
i
− f
i
σ
ε
[ψ(ψ
T
W ψ)
−1
ψ
T
]
1/2
ii
with the normal distribution and the variable
1
σ
s
ˆ
ε
ε
ε
T
W
ˆε
ε
n − S
=
1
σ
ˆσ
ε
.
The square of this variable belongs to χ
2
n−S
distribution with n − S degrees of
freedom:
t
n−S
=
ˆ
f
i
− f
i
[ψ(ψ
T
W ψ)
−1
ψ
T
]
1/2
ii
[
ˆε
ε
T
W
ˆε
ε/(n − S)]
1/2
∈ St (t
k
).