Виноградов А.Б. Векторное управление электроприводами переменного тока
Подождите немного. Документ загружается.

эл.б0
эл.б0
б
эл0
эл.б0
эл.б0
бббб
ω
ωω
ω
ω
s
sd
s
sq
s
sqs
s
sq
UU
p
IZ
IR
U
U
Ψ
+
Ψ
+= ;
f
f
ff
f
ff
ff
sf
f
L
L
IR
p
IR
IR
U
U
бб
Ψ
+= ;
бsбб fdf
fdf
б
sdsd
s
sd
IM
IM
IL
IL
+=
Ψ
Ψ
;
бss
sqsq
sб
sq
IL
IL
=
Ψ
Ψ
;
sd
sd
sб
ffd
ff
sdfd
ff
ff
f
f
L
L
IL
IM
IL
IM
IL
IL
б
б
ббб
+=
Ψ
Ψ
.
Учитывая соотношения между базовыми значениями величин, по-
лучим систему уравнений в относительных единицах, описывающих
электромагнитные процессы в синхронном двигателе во вращающейся
с синхронной скоростью системе координат (относительные величины
обозначены теми же символами, которыми они обозначены в абсо-
лютных единицах, но помечены чертой сверху):
)(
0
эл.б0
sqsds
sd
sd
IRUp Ψ+−=Ψ
ωω
;
)(
0
эл.б0
sdsqs
sq
sq
IRUp Ψ−−=Ψ
ωω
;
f
f
f
f
TIUp /)( −=Ψ ;
(4.7)
d
fsdsd
xII /)( −Ψ=
;
q
sqsq
xI /Ψ= ;
sd
d
fff
IxI )1(
σ
−−Ψ= ,
где
0
ω
— относительная частота напряжения на статоре,
;
s
R
— активное сопротивление обмотки статора,
б.000
/
элэл
ωω=ω
б
Z/
s
s
RR = ;
d
x — синхронное сопротивление статора по продоль-
ной оси,
бб
б.0
// LLZLx
sdsd
элd
=ω= ;
q
x — синхронное сопротив-
ление статора по поперечной оси,
бб
б.0
// LLZLx
sqsq
элq
=ω= ;
f
T — постоянная времени обмотки возбуждения,
fff
RLT /
=
;
f
σ
— коэффициент рассеяния в магнитном контуре обмотки возбуж-
61

дения и обмотки статора по оси d, , )/(1
2
sdfdff
LLM−=σ
)/(
2
sdfdf
LLM
— сомножитель, равный )1(
f
σ
− .
При преобразованиях учтено, что сомножитель
1)/(
бб
=
sбfdf
LLIM .
Для электромагнитного момента имеем
)()2/3(
д sdsqsqsdр
IIZM
Ψ
−
Ψ
= .
бб
)2/3(
ssбр
IZM
Ψ
=
Выбрав базовое значение момента равным
и поделив на него обе части этого выражения, получим выражение для
момента в относительных единицах:
)(
д sdsqsqsd
IIM Ψ−Ψ=
.
Основное уравнение механики привода при выбранном и ба-
б
M
зовом значении угловой скорости
рбэл
Z/
.0б
ω
ω
=
может быть пере-
писано в виде
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
б
с
б
д
б
б
б
1
M
M
M
M
M
J
p
ωω
ω
,
или в нормированной форме:
м
сд
/)( TMMp −=
ω
,
где — механическая постоянная времени привода,
м
T
ббм
/ MJT
ω
=
.
В отличие от асинхронного двигателя, в котором при изменении
момента нагрузки на валу изменяется его скорость, в синхронном дви-
гателе изменение нагрузки сопровождается изменением углового по-
ложения ротора и связанного с ним пространственного вектора пото-
косцепления ротора относительно вектора потокосцепления статора
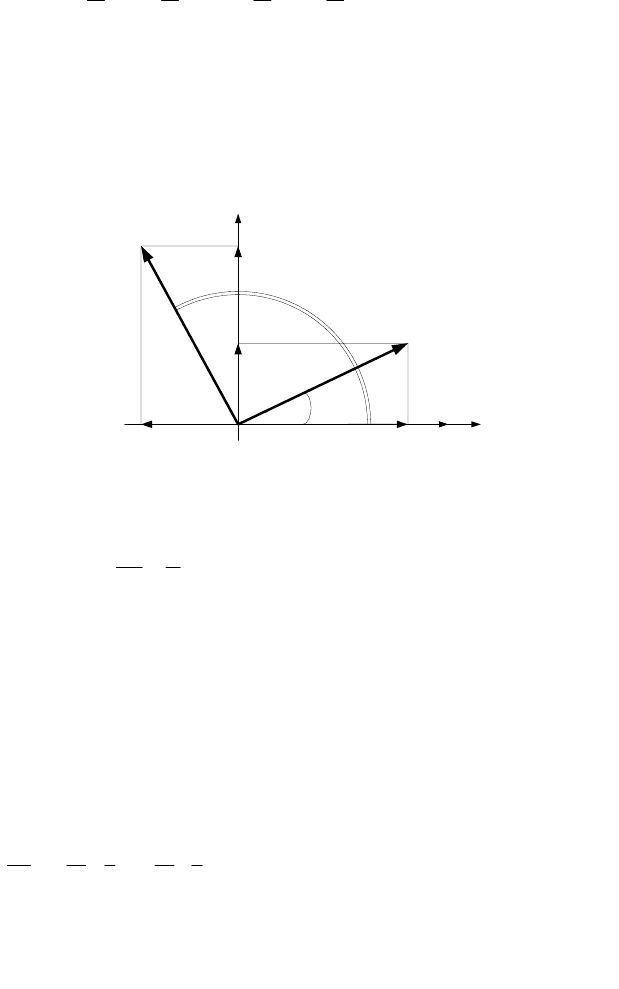
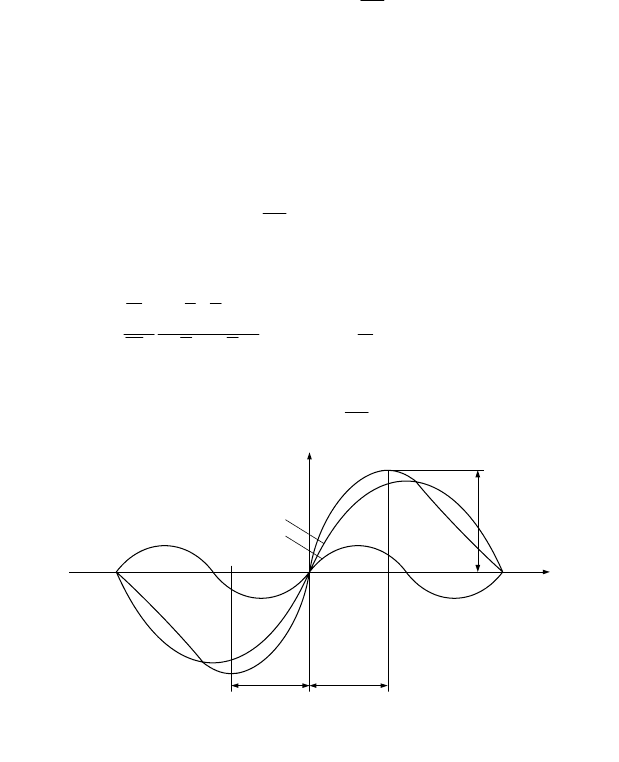
при неизменной скорости. В режиме идеального холостого хода векто-
ры
потокосцепления ротора и статора совпадают в пространстве. Как
показано на рис.4.2, при наличии нагрузки на валу двигателя вектор
потокосцепления ротора отстает от вектора потокосцепления статора
на некоторый угол
θ
, называемый углом нагрузки. Если рассматри-
вать установившийся режим и пренебречь активным сопротивлением
обмотки статора, то, как следует из равенств (4.1) и (4.2), статорное
напряжение представляет собой производную от потокосцепления ста-
тора, и, следовательно, вектор напряжения на статоре опережает век-
тор потокосцепления статора на угол
2/
π
. Изменение нагрузки при
постоянном модуле вектора напряжения
ss
UU =
r
приводит к изме-
нению соотношения между его проекциями на оси вращающейся сис-
62
63
темы координат (
d, q), которые в относительных единицах определя-
ются как
θ
sin
ssd
U−=U ;
θ
cos
ssq
U−=
dtZ
t
р
∫
−=
0
эл0
)(
ωωθ
U .
Угол нагрузки, измеряемый в радианах, определяется через инте-
грал от разности мгновенных значений скоростей поля статора и рото-
ра в электрическом пространстве, существовавшей в течение времени
переходного процесса, связанного с изменением нагрузки:
.
s
U
r
q
sq
U
sd
U
0
2/
π
θ
+
s
Ψ
r
sd
Ψ
r
d
f
Ψ
r
θ
sq
Ψ
r
Рис.4.2. Пространственная векторная диаграмма синхронного двигателя
Через скорости в относительных единицах выражение для угла
θ
в радианах запишется в операторной форме:
p/)(
0эл.б0
ω−ωω=θ .
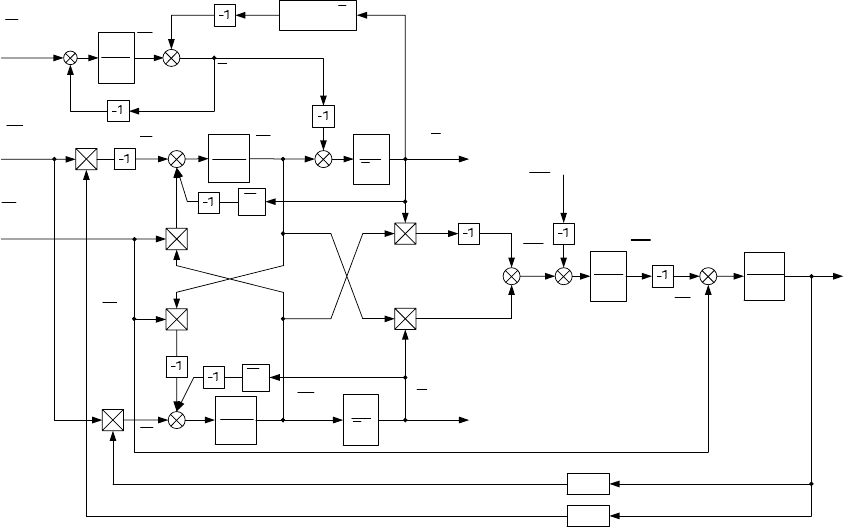
Структурная схема электропривода с синхронным двигателем без
демпферной обмотки во вращающей системе координат и при пита-
нии от источника бесконечной мощности показана на рис.4.3.
4.2. Статические характеристики электропривода
с синхронным двигателем
В основу рассмотрения статических (так называемых угловых) ха-
рактеристик синхронного двигателя, представляющих собой зависи-
мость электромагнитного момента в установившемся режиме от угла
нагрузки, положено выражение для момента двигателя
ssqq
IΨ−
dssd
IМ Ψ=
д
. Поскольку в установившемся режиме ток в
демпферной обмотке отсутствует, выкладки, приведенные далее в
этом разделе, справедливы как для двигателя без демпферной обмотки,
так и для двигателя с демпферной обмоткой.
pТ
f
1
d
df
х)1( σ−
pТ
M
1
cos
sin
f
u
s
U
0
ω
0
ω
0
ω
Д
M
с
M
θ
ω
sd
I
f
I
sd
Ψ
f
Ψ
sd
U
sq
U
sq
Ψ
sq
I
p
бэл.0
ω
p
бэл.0
ω
d
х
1
q
х
1
s
R
s
R
p
бэл.0
ω
Рис.4.3. Структурная схема электропривода с синхронным двигателем без демпферной обмотки во вращающейся системе
координат
64
Подставив в формулу для момента значения проекций вектора то-
ка статора
d
fsdsd
xII /)( −Ψ= и
d
sq
sq
xI /Ψ= , получим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−ΨΨ−
Ψ
=
dq
sqsd
d
fsd
xxx
I
М
11
д
.
Как следует из векторной диаграммы (см. рис.4.2), проекции век-
тора потокосцепления статора могут быть записаны через модуль век-
тора в относительных единицах
s
s
Ψ=Ψ
r
и угол нагрузки в виде
θ
cos
ssd
Ψ=Ψ ;
θ
sin
ssq
Ψ=Ψ .
С учетом этого выражение для момента при известных токе воз-
буждения и потокосцеплении статора можно определить как сумму
двух слагаемых:
θθ
2sin
11
2
sin
2
д
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
Ψ
+
Ψ
=
dq
S
d
fsd
xxx
I
М
.
(4.8)
Поскольку в неявнополюсном двигателе индуктивные сопротив-
ления по прямой и квадратурной осям равны друг другу (
dq
xx =
), то
первое слагаемое в формуле (4.8) представляет собой электромагнит-
ный момент двигателя с неявнополюсным ротором, а второе получает-
ся вследствие неравенства значений индуктивных сопротивлений по
прямой и квадратурной осям системы координат в явнополюсном дви-
гателе. Из первых двух выражений системы уравнений (4.7) в устано-
вившемся режиме (т.е. при p= 0) и при пренебрежении активным со-
противлением обмотки статора (
0=
s
R
) можно получить связь между
потокосцеплением и напряжением на обмотке статора:
0
/
ω
sd
sd
U−=Ψ ;
0
/
ω
sq
sd
U=Ψ ;
0
/
ω
s
s
U=Ψ ,
где
s
U — модуль вектора статорного напряжения.
Тогда выражение для момента двигателя можно записать в виде
θ
ω
θ
ω
2sin
11
2
sin
2
0
2
0
д
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+=
dq
s
d
f
s
xx
U
x
IU
М
.
(4.9)
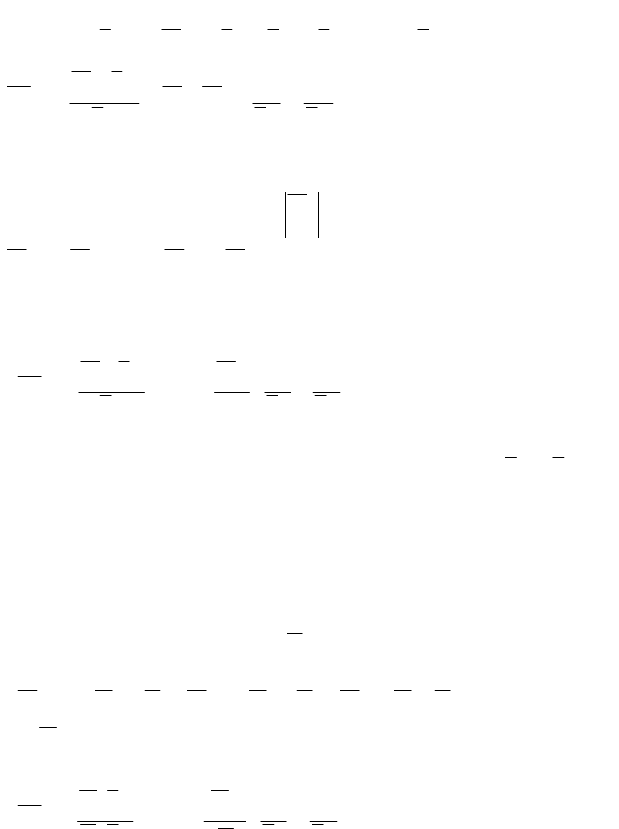
По выражению (4.8) или (4.9) может быть построена угловая ха-
рактеристика синхронного двигателя (рис.4.4). Отмеченная на харак-
теристике точка 0
— точка идеального холостого хода. По мере увели-
чения нагрузки на валу двигателя вектор потокосцепления ротора вме-
сте с ротором сдвигается в электрическом пространстве в сторону от-
65
ставания от вектора потокосцепления статора. Таким образом, угол
θ
является отсчитываемым в электрических радианах во вращающейся
системе координат углом смещения ротора от положения, соответст-
вующего идеальному холостому ходу двигателя.
Если значения момента в двигательном режиме считать положи-
тельными, то двигательному режиму соответствует часть ха-
рактеристики вправо от точки идеального холостого хода, а ге-
нераторному
— влево. Часть характеристики, на которой увеличение
угла
θ
сопровождается ростом момента двигателя (участок 0А), соот-
ветствует устойчивой работе двигателя с синхронной скоростью. Если
после достижения моментом значения
maxд
М момент нагрузки еще
возрастет, то электромагнитный момент двигателя не увеличится, а
уменьшится, и двигатель выпадет из синхронизма. Для генераторного
режима устойчивый режим характеризуется участком
ОВ. Для двига-
теля с неявнополюсным ротором критическим углом нагрузки являет-
ся угол
2/
max
π
θ
±
= . Для двигателя с явнополюсным ротором значе-
ние критического угла нагрузки может быть определено из выражения
(4.9) в результате исследования его на экстремум. Приравнивая нулю
частную производную
θдMд /
д
и имея в виду, что
, можно получить квадратное уравнение для оп-
ределения критического угла нагрузки:
1cos22cos
2
−=
θθ
0
2
1
cos
)(2
cos
max
0
max
2
=−
−
+
θ
ω
θ
qd
q
f
s
xx
xI
U
.
(4.10)
При найденном значении
max
θ
по формуле (4.9) можно опреде-
лить значение максимального момента
maxд
М .
2/
π
−
π
−
2/
π
π
М
θ
А
В
2
1
0
)(
1
θ= fМ
)(
2
θ
=
fМ
max Д
M
Рис.4.4. Угловые характеристики привода с синхронным двигателем при
постоянных напряжении на статоре и токе возбуждения:
1 — генераторный режим; 2 — двигательный режим
66
Оценивая результат, надо иметь в виду, что он содержит неко-
торую погрешность, связанную с пренебрежением активным со-
противлением статорной обмотки.
Часто выражение для момента двигателя в абсолютных единицах
записывают в виде
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+=
dq
s
d
ms
р
xx
U
x
EU
Z
M
11
2
sin
3
2
0эл
д
θ
ω
,
где
— амплитудное значение ЭДС вращения,
m
E
эл0
ω
fmdm
ILE
=
.
4.3. Математическое описание синхронного двигателя
с демпферной обмоткой
Наличие демпферной обмотки существенно усложняет математи-
ческое описание двигателя, так как к уже рассмотренной магнитной
связи между статорной обмоткой и обмоткой возбуждения добавляют-
ся магнитные связи этих обмоток с демпферной обмоткой. Аналогично
тому, как это было сделано с обмоткой статора при описании син-
хронного двигателя во вращающейся системе координат (см.
рис.4.1),
демпферную обмотку можно тоже представить в виде двух обмоток,
оси которых направлены по осям
d и q. При этом должны быть учтены
взаимные магнитные связи между статорной обмоткой по оси
d, демп-
ферной обмоткой по оси
q и обмоткой возбуждения, а также между
статорной и демпферной обмотками по оси
q. Наличие демпферной
обмотки не влияет на уравнения равновесия напряжений (4.1), (4.2) и
(4.3), которые могут быть без изменения использованы при описании
синхронного двигателя с демпферной обмоткой. К ним должны быть
добавлены уравнения равновесия напряжений для демпферной обмот-
ки и выражения для потокосцепления всех пяти фигурирующих в мо-
дели обмоток. В абсолютных единицах эти
уравнения записываются
так:
DDD
pIR
Ψ
+=0
;
QQQ
pIR
Ψ
+=0
;
DdDfdfsdsdsd
IMIMIL
+
+
=Ψ ;
QqQsqsqsq
IMIL +=Ψ ;
DfDsdfdfff
IMIMIL
+
+=Ψ
;
fDfsdDdDDD
IMIMIL
+
+=Ψ ;
67
sqQqQQQ
IMIL +=Ψ ,
где — активное сопротивление демпферной обмотки;
QD
RR =
D
Ψ
,
Q
Ψ , , — потокосцепления и токи демпферной обмотки соот-
D
I
Q
I
ветственно; , — коэффициенты взаимной индукции между
dD
M
Dd
M
обмоткой статора и демпферной обмоткой по оси d; , —
qQ
M
Qq
M
коэффициенты взаимной индукции между обмоткой статора и демп-
ферной обмоткой по оси q;
DffD
MM
=
— коэффициент взаимной ин-
дукции между обмоткой статора и демпферной обмоткой по оси d и
обмоткой возбуждения; , — индуктивности демпферной об-
D
L
Q
L
мотки по осям d и q.
Для перехода к относительным единицам надо выбрать базовые
значения величин, относящихся к демпферной обмотке:
базовый ток демпферной обмотки по оси
d
dD
MI /
sбDб
Ψ
=
;
базовый ток демпферной обмотки по оси
q
qQ
MI /
sбQб
Ψ
=
;
базовое потокосцепление демпферной обмотки по оси
d
;
DбDDб
IL=Ψ
базовое потокосцепление демпферной обмотки по оси q
бб QQQ
IL=Ψ .
Значение базового тока демпферной обмотки по оси d выбрано та-
ким, что при протекании его по обмотке создалось бы потокосцепле-
ние статорной обмотки по той же оси, равное базовому
sб
Ψ
. Базовое
потокосцепление демпферной обмотки по оси d выбирается равным
потокосцеплению, создаваемому базовым током . Аналогичным
Dб
I
образом выбраны базовые значения для демпферной обмотки по оси q.
Действуя так же, как в разд. 4.1, можно получить описание элек-
тромагнитных процессов в нормированном виде:
)(
0
эл.б0
sqsds
sd
sd
IRUр Ψ+−=Ψ
ωω
;
)(
0
эл.б0
sd
sq
s
sq
sq
IRUр Ψ−−=Ψ
ωω
;
f
f
f
f
TIUр /)( −=Ψ ;
D
DD
TIр /−=Ψ
;
Q
QQ
TIр /−=Ψ ;
68

69
d
Dfsdsd
xIII /)( −−Ψ= ;
q
Qsqsq
xII /)( −Ψ= ;
D
f
sd
d
f
ff
IIxI
µσ
−−−Ψ= )1( ;
sd
d
D
f
D
DD
IxII
µσ
−−−Ψ= )1(
;
sq
q
Q
QQ
IxI )1(
σ
−−Ψ=
)/()(
dDfdfDff
MLMM=
;
µ
;
)/()(
dfDdDDfD
MLMM=
µ
,
где ,T — постоянные времени демпферной обмотки по осям d и q
D
T
Q
соответственно;
)1(
D
σ
−
, )1(
Q
σ
−
— коэффициенты связи между
статорной и демпферной обмотками по осям d и q соответственно,
)/()1(
2
sdDdDD
LLM=−
σ
)/()1(
2
sqQdQQ
LLM=−
σ
D
, ;
σ
,
Q
σ
—
коэффициенты рассеяния демпферной обмотки по осям d и q ответст-
венно;
f
µ
,
D
µ
— коэффициенты связи между обмоткой возбуждения
и демпферной обмоткой по оси d соответственно.
Удобная для моделирования в среде МАТLАВ Simulink нормиро-
ванная структурная схема электропривода с синхронным двигателем,
имеющим демпферную обмотку, во вращающейся сиcтеме координат
и при питании от источника бесконечной мощности приведена на
рис.4.5. Она может быть использована для расчета переходных про-
цессов, связанных с изменением напряжения и частоты источника пи-
тания, момента нагрузки и напряжения возбуждения в пределах, когда
эти изменения таковы, что двигатель работает при малых отклонениях
значений переменный от их начальных значений, соответствующих
синхронному режиму. Это означает, что при расчете переходных про-
цессов в синхронном двигателе на выходах интеграторов, входящих в
состав структурной схемы, надо предварительно установить значения
начsd
Ψ ,
начsq
Ψ ,
начf
Ψ ,
начD
Ψ ,
начQ
Ψ ,
нач
ω
нач
,
θ
, соответствую-
щие выбранному начальному синхронному режиму. За начальный
удобно выбрать режим идеального холостого хода, при котором
0нач
ω=ω 0
нач
,
=
θ .
Этим будет обеспечено нулевое начальное значение угла нагрузки.
Кроме того, надо иметь в виду, что в установившемся режиме токи в
демпферных обмотках отсутствуют, т. е. 0
нач
=
Dнач
=
Q
II , а напря-
жение и ток возбуждения в относительных единицах равны друг
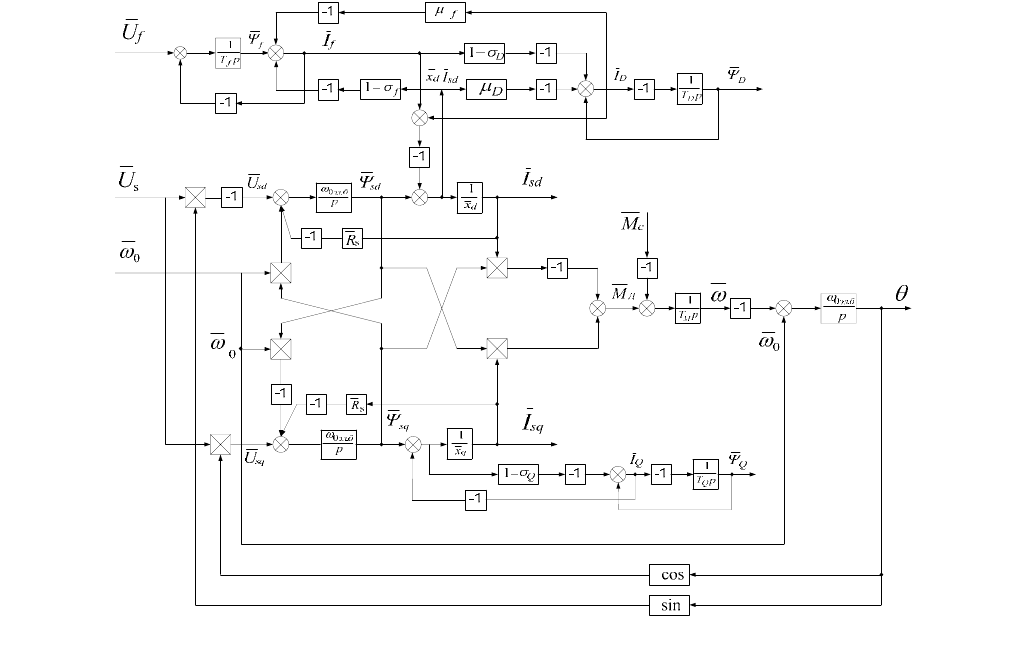
Рис.4.5. Структурная схема электропривода с синхронным двигателем с демпферной обмоткой во вращающейся
системе координат
70