Усольцев А.А. Частотное управление асинхронными двигателями
Подождите немного. Документ загружается.

Приложение 1 91
Приложение 1.
Основное свойство симметричных m-фазных систем
В симметричной -фазной системе m сумма мгновенных значений фазных величин
равна нулю. Это свойство симметрии находит свое отражение в равенстве нулю
суммы всех фазных операторов, т.е.
1
()
11
0
mm
k
mm
kk
−
==
=
=
∑∑
aa
,
где:
– оператор -й фазы;
1
()
k
k
−
=aa
m
k
2
()
qj
m
m
e
π
⋅
=a – оператор системы, а 1, 2qm
=
K
– целое число, определяющее порядок следования фаз.
В этом можно убедиться следующим образом. Запишем сумму фазных опе-
раторов в виде
1
() ()
1
m
m
S
m
−
=+ + +aKa, полагая 1q
=
, т.к. для суммирования поря-
док следования фаз безразличен. Затем умножим обе части равенства на
и,
преобразовав результат с учетом того, что
()m
a
2
20
()
1
mj
mj
m
m
eee
π
⋅
π
j
=
===a , получим
22
() () () () () () ()
1
mm
mmm mmm m
SS
−
+++=+++ +=a=a a a aa aKK
1
0
.
Так как
, то это равенство возможно только при условии .
()
1
m
≠a S =
Приложение 2.
Обобщённый вектор в симметричной m–фазной системе
Обобщённым называется вектор, проекции которого на оси фазных обмоток
в любой момент времени равны мгновенному значению соответствующих фаз-
ных величин. Его можно построить суммированием векторов, направление кото-
рых совпадает с осями фазных обмоток, а модули равны мгновенным значениям.
Назовем эти векторы – фазными. Аналитически операцию
суммирования фазных
векторов (например, векторов тока) можно представить в виде
11
11 22 1 2() () ()
km
s
kk mm m k m m m
ii i i ii i i
−
−
=+ + + =+ + +iaa a a a a aKK K K
где:
– мгновенное значение тока в -й фазе;
k
i
k
1
()
k
km
−
=aa – оператор -й фазы; k
2
()
j
m
m
e
π
=a
– оператор симметричной системы фазных токов.
Пусть для произвольного момента времени задан обобщённый вектор тока
max
j
ie
ϑ
i=
, где () – угол между вектором и вещественной осью. Тогда по
определению фазные токи и фазные векторы равны
Ftϑ= i
[
]
[
]
1 max max max
111
1 1 2 22 2() () ()
cos ; cos ( 1)2 / cos ( 1)2 /
;
km
km
mkkkkmmmm
ii ii k mii m m
iii ii i
−−
=ϑ= ϑ+−π = ϑ+−π
=== == =iiaaiaaia
KK
KK
Отсюда вектор, полученный геометрическим суммированием фазных токов,
будет равен

92 Приложение 2
()
1-
1 2() () max ()
-1
()
-1
max ( )
1
max
2
cos cos
2
cos ( 1)
2
cos ( 1)
2
cos ( 1)
2
cos ( 1)
m
mk
smmm m
m
m
m
k
m
k
t
m
ii i i k
m
m
m
ik
m
ik
m
−
=
1
⎧
π⎫
⎛⎞
ϑ+ ω +γ+ +
⎜⎟
⎪
⎪
⎝⎠
⎪
⎪
⎪
⎪
π
⎡⎤
=+ + + = + ϑ+ − + =
⎨
⎬
⎢⎥
⎣⎦
⎪
⎪
⎪
⎪
π
⎡⎤
+ϑ+−
⎪
⎪
⎢⎥
⎣⎦
⎩⎭
⎧π⎫
⎡⎤
=ϑ+−=
⎨⎬
⎢⎥
⎣⎦
⎩⎭
π
⎡⎤
=ϑ+−
⎢
⎣⎦
∑
a
ia a a
a
a
K
KK
K
K
1
max
1
2( 1)
max
() max
1
22
cos ( 1) sin ( 1)
22
cos sin cos 2( 1) sin 2( 1)
2
222
m
k
m
k
m
jk j
m
k
kjk
mm
i
jkjk
mm
imm
me i e
=
=
ϑ− ϑ
=
⎧⎫
⎧π π
⎡⎤⎡⎤
⋅−+−
⎨⎨
⎥⎢ ⎥ ⎢ ⎥
⎣⎦⎣⎦
⎩⎭
⎩⎭
⎧π
⎡⎤⎡⎤
=ϑ+ϑ+−+−
⎨⎬
⎢⎥⎢⎥
⎣⎦⎣⎦
⎩⎭
⎡⎤
=⋅+ = =
⎢⎥
⎣⎦
∑
∑
∑
ai
⎫
=
⎬⎬
π⎫
=
k
m
(п.2.1)
Последнее преобразование суммы справедливо потому, что множитель 2 в пока-
зателе степени фазного оператора определяет порядок следования фаз и не влия-
ет на результат суммирования, т.е.
2( 1) 1
() ()
11
mm
k
m
kk
−
−
==
=
∑
∑
aa
, а из основного свойства
симметричных систем (см. приложение 1) следует, что
1
()
1
0
m
k
m
k
−
=
=
∑
a
.
Таким образом, вектор
s
i
, полученный в результате суммирования, превос-
ходит по модулю обобщённый вектор в раз, поэтому в -фазной системе
для получения обобщённого вектора результат суммирования нужно умножить
на коэффициент , т.е.
.
i /2m m
2/m
2/
s
m=ii
Из выражений (п.2.1) следует, что
max 1
1
2
cos ( 1) Re[ ] cos
22
m
ks
k
m
ik i
m
=
⎧π⎫
⎡⎤
⋅− == ϑ=
⎨⎬
⎢⎥
⎣⎦
⎩⎭
∑
i
m
i
. (п.2.2.)
Приложение 3 93
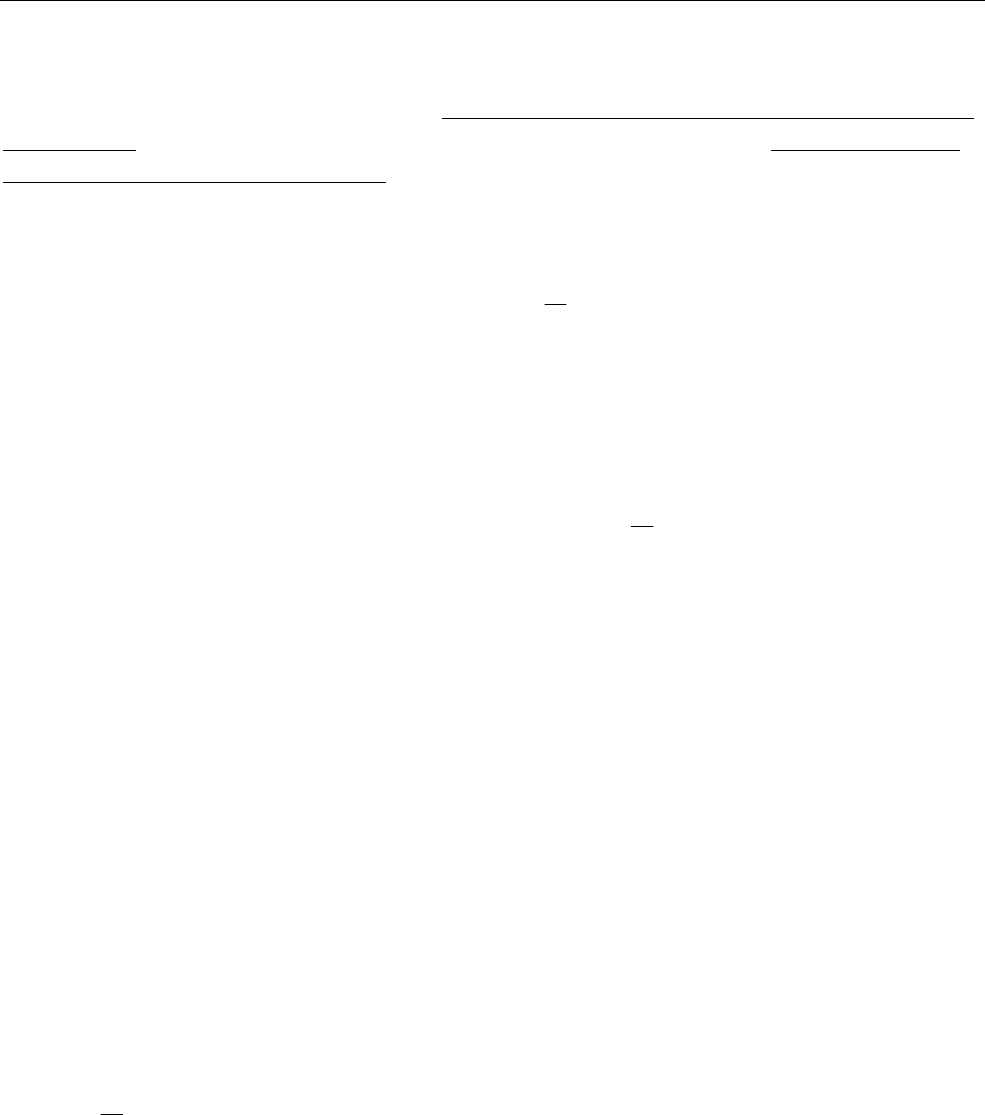
Приложение 3.
Индексы систем координат принятые в пособии
Индекс
системы
Частота
вращения
()mn
ω
Ориентация вещественной оси
Название
системы
αβ
0 по оси обмотки фазы
статора
a
неподвижная
uv
ω
по оси обмотки фазы
ротора
a
синхронная с
ротором
x
y
1
ω
произвольная
синхронная с
магнитным полем
dq
1
ω
по вектору потокосцепления
ротора
синхронная с
магнитным полем
mn
произв. произвольная произвольная
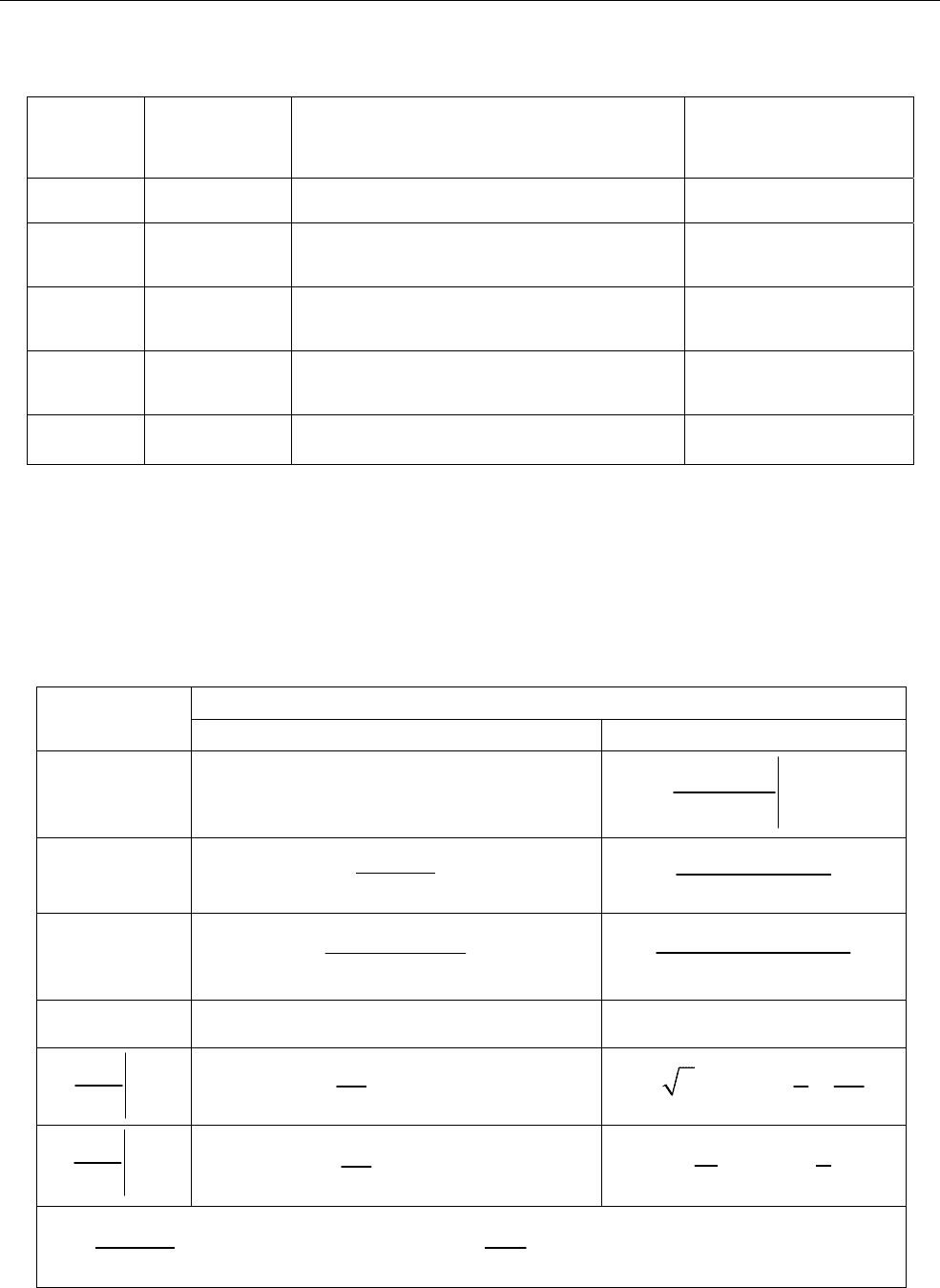
Приложение 4.
Передаточные функции и переходные характеристики при различных
настройках регулятора скорости в трансвекторной системе
Тип регулятора
Функции
П ПИ
рс
()Wp
K
м
2
(1 )
KT
Kp
p
τ=
+τ
τ
у
()Wp
1
1
K
Tp+
22
2(1 )
22
p
pp
+τ
τ
+τ+
в
()Wp
()
1
1
K
CK T p+
()
2
22
22
p
Jp p
τ
τ+τ+
(
)
*
,
c
mωω
(
)
*
1/
K
Tω− Θ
*
ω
*
*
()t
∆ω
ω
ω
()
/
11
K
tT
K
T
e
−
⎛⎞
−⋅−
⎜⎟
Θ
⎝⎠
/
3
12 cos
4
t
t
e
−τ
π
⎛⎞
+−
⎜⎟
τ
⎝⎠
*
()
c
m
t
∆
ω
ω
()
/
11
K
tT
K
T
e
−
−−
Θ
/
1sin
t
t
e
−τ
τ
⎛⎞
−
⎜⎟
Θτ
⎝⎠
2
2
2
3
2
pd
z
C
r
ψ
= ;
;
M
/TJ= C
M
/
K
J
TTK
CK
==;
*
/
c
JmΘ= ω

94 Содержание
Содержание
Введение .....................................................................................................................................3
1.
Асинхронный двигатель как объект управления..............................................................4
1.1 Математическое описание процессов преобразования энергии в электрической ма-
шине ...................................................................................................................................4
1.1.1
Понятие обобщённого пространственного вектора ..........................................4
1.1.2
Потокосцепления электрической машины.........................................................10
1.1.3
Уравнения статора и ротора в векторной форме...............................................13
1.1.4 Обобщённая электрическая машина...................................................................15
1.2 Асинхронный короткозамкнутый двигатель ..............................................................17
1.2.1 Уравнения коротокозамкнутого АД ...................................................................17
1.2.2 Статические характеристики АД при питании от источника напряжения.....18
1.2.3
Динамические характеристики АД при питании от источника напряжения .21
1.2.4 Статические характеристики АД при питании от источника тока ..................25
1.2.4.1
Круговая диаграмма АД при питании от источника тока .......................25
1.2.4.2
Токи намагничивания и ротора ..................................................................27
1.2.4.3
Электромагнитный момент.........................................................................28
1.2.5
Динамические характеристики АД при питании от источника тока...............30
1.2.6 Модель АД при импульсном питании ................................................................32
2.
Частотное управление АД...................................................................................................34
2.1 Модульное управление .................................................................................................34
2.1.1 Влияние частоты питания на электромагнитные процессы в АД....................34
2.1.2
Закон М.П. Костенко ............................................................................................37
2.1.3
Разомкнутые системы частотного управления ..................................................39
2.1.3.1
Управление по закону U/f=const................................................................40
2.1.3.2
Управление с постоянным критическим моментом.................................43
2.1.4
Замкнутые системы частотного управления......................................................45
2.1.4.1
IR-компенсация ............................................................................................47
2.1.4.2
IZ-компенсация ............................................................................................48
2.2
Векторное управление...................................................................................................50
2.2.1
Трансвекторное управление (FOC).....................................................................50
2.2.1.1
Выбор уравнения электромагнитного момента и системы координат ..51
2.2.1.2
Модель АД, управляемого током статора.................................................54
2.2.1.3
Модель АД, управляемого напряжением статора ....................................56
2.2.1.4
Информационная часть систем трансвекторного управления ................57
2.2.1.5
Особенности настройки регулятора скорости ..........................................64
2.2.2
Прямое управление моментом (DTC).................................................................65
2.3
Преобразователи частоты для асинхронного электропривода .................................71
2.3.1
Основные типы преобразователей......................................................................71
2.3.2
Широтно-импульсные преобразователи ............................................................74
2.3.2.1
ШИП с синусоидальной модуляцией напряжения...................................74
2.3.2.2
ШИП, формирующие фазные токи............................................................76
2.3.2.3
Пространственно-векторная модуляция....................................................78
2.3.3
Современные преобразователи для электропривода широкого применения.83
2.3.3.1
Подключение преобразователя ..................................................................84
2.3.3.2
Основные характеристики и функции.......................................................86
Список литературы.......................................................................................................................90
Приложение 1. Основное свойство симметричных
m-фазных систем....................................91
Приложение 2. Обобщенный вектор в симметричной
m-фазной системе..............................91
Приложение 3. Индексы систем координат, принятые в пособии ..........................................93
Приложение 4. Передаточные функции и переходные характеристики при различных на-
стройках регулятора скорости в трансвекторной системе ............................93

Содержание 95