Van Kreveld M., Nievergelt J., Roos T., Widmayer P. (eds.) Algorithmic Foundations of Geographic Information Systems
Подождите немного. Документ загружается.

2.5 Knowledge Representation: Associative Recall in Random
Nets .............................. 159
2.6 Spatial Data Management: Proximity Access to Objects
Embedded in Space ..................... 160
2.7 Concise Summary of Trends that Shaped the Development
of Data Structures ...................... 160
Basic Concepts and Characteristics of Multi-Dimensional and Spa-
tial
Data Structures ......................... 161
3.1 The Profile of a Data Structure ............... 161
3.2 The Central Issue: Organizing the Embedding Space ver-
sus
Organizing Its Contents ................. 163
The Three Step Model of Spatial Object Retrieval ........ 165
4.1 Cell Addressing: Query q -+ set {(i,j,...)} of Query Cells 166
4.2 Coarse Filter: Set of Query Cells Determines Candidate
Objects ............................ 167
4.3 Fine Filter: Compare Each Object to the Query ..... 167
A Sample of Data Structures and their Space Partitions ..... 168
5.1 General Consideration .................... 168
5.2 Space Driven Partitions: Multi-Dimensional Linear Hash-
ing, Space Filling Curves .................. 169
5.3 Data Driven Partitions: k-d-B-Tree, hB-Tree ....... 172
5.4 Combinations of Space Driven and Data Driven Partitions:
EXCELL, Grid File, Hierarchical Grid Files~ BANG File. 175
5.5 Redundant Data Storage .................. 178
Spatial Data Structures for Extended Objects ........... 178
6.1 Parameter Space Transformations ............. 179
6.2 Clipping ............................ 179
6.3 Regions with Unbounded Overlap: R-Tree ......... 180
6.4 Cells with Bounded Overlap: Multilayer Structures, R-File,
Guard File .......................... 182
6.5 Conclusions Drawn from the Structures Surveyed ..... 185
Summary: Points to Consider When Choosing a Spatial Data
Structure ............................... 186
7. Space Filling Curves versus Random Walks
Edouard Bugnion, Thomas Roos, Roger Wattenhofer,
mayer
1
2
and Peter Wid-
199
Introduction
..............................
199
Foundations .............................. 200
2.1 Space Filling Curves ...................... 201
2.2 Transformation & Query ................... 202
Model of Computation ........................ 203
Performance Analysis ........................ 205
4.1 Number of a-Intervals .................... 205
4.2 Length of a-Intervals ..................... 206
4.3 Final Analysis ........................ 209
×ll
5 Simulation Results
..........................
209
8. External-Memory Algorithms with Applications in GIS
Lars Arge
1
6
7
213
Introduction
..............................
213
1.1 Outline of Chapter ...................... 214
The Parallel Disk Model ....................... 215
RAM-Complexity and t/O-Complexity
...............
217
3.1 Fundamental External-Memory Bounds .......... 218
3.2 Summary
...........................
219
Paradigms for Designing I/O-Efficient Algorithms ......... 219
4.1 Merge Sort .......................... 220
4.2 Distribution Sort ....................... 220
4.3 Buffer Tree Sort ....................... 222
4.4 Sorting on Parallel Disks .................. 225
4.5 Summary ........................... 226
External-Memory Computational Geometry Algorithms ..... 227
5.1 The Orthogonal Line Segment Intersection Problem . . . 229
5.2 The Batched Range Searching Problem
..........
236
5.3 The Red/Blue Line Segment Intersection Problem .... 239
5.4 Other External-Memory Computational Geometry Algo-
rithms ............................. 245
5.5 Summary ........................... 247
TPIE -- A Transparent Parallel I/O Environment ........ 247
Conclusions .............................. 249
9, Precision and Robustness in Geometric Computations
Stefan Schirra
255
1 Introduction
..............................
255
1.1
1.2
1.3
1,4
1.5
Geometric Computation
Precision and Correctness
..................
255
Robustness and Stability .................. 256
Degeneracy .......................... 257
Attacks on the Precision Problem
..............
258
Floating-Point Arithmetic
..................
258
.......................
260
2.1
2.2
2.3
2.4
2.5
Exact
3.1
3.2
3.3
3.4
3.5
Geometric Problems
.....................
260
Geometric Predicates
....................
261
Arithmetic Expressions in Geometric Predicates ..... 261
Geometric Computation with Floating-Point Numbers . . 262
Heuristic Epsilons
......................
263
Geometric Computation
...................
264
Exact Integer and Rational Arithmetic ........... 265
Lazy Evaluation
.......................
268
Floating-Point Filter
.....................
268
Interval Arithmetic
......................
270
Exact Sign of Determinant
.................
271
XIII

3.6 Certified Epsilons ....................... 271
4 Geometric Computation with Imprecision ............. 275
4.1 Implementation with Imprecise Predicates ......... 275
4.2 Epsilon Geometry ...................... 276
4.3 Axiomatic Approach ..................... 277
5 Related Issues ............................. 278
5.1 Rounding ........................... 278
5.2 Inaccurate Data ....................... 279
5.3 Geometric Algorithms in a Library ............. 280
6 Conclusion .............................. 281
References ............................... 282
×IV

Chapter 1.
Computing:
Software
Introduction to Geometric
From Algorithms to
Jiirg Nievergelt
Dept. of Computer Science
ETH Ziirich
Switzerland
j n~inf, ethz. ch
1 History of Geometry
Geometry started as a practical art for "measuring the earth". Soon it became
the most formal of disciplines that served to define the standard of mathematical
rigor. Later it spawned some of the most abstract mathematical disciplines to
the extent of disavowing its original visual intuition.
Geometry as a computational tool re-emerged in the early days of computer
graphics and computer-aided design. Computational geometry followed as a the-
oretical discipline that created hundreds of elegant and efficient algorithms. It
came as a surprise, however, that "simple" operations such as intersection, when
applied to degenerate configurations, cause conceptual and numerical problems
that make it difficult to certify programs as correct and robust. The current chal-
lenge is to make proven algorithms generally available in the form of portable
library programs. We describe the XYZ GeoBench and Program Library as an
example of a system designed for teaching computational geometry.
1.1 Geometry: A Tool for Processing Spatial Data
Much of the "data" mankind has had to deal with throughout its existence
is spatial in nature: the physical environment with its natural and man-made
objects. Nature responded to man's need for spatial information by evolving
the visual nervous system, a marvelous information-processing engine whose
performance remains unrivaled by any man-made artifact. Man's quest to reason
about space gave rise to the oldest among the mathematical sciences, geometry,
the science of "earth measurement".
The development of science admits many different approaches to the same
problem. The long history of geometry shows all of the styles a mathematical
science can assume, from pragmatic utility to extreme formalism. Let us illustrate
this point with a few early examples of geometry in action.
Computational Geometry during the reign of King Ahusser of the
Hyksos -,~ 1700 B.C. The need to re-partition land after the yearly floods of
the river Nile called for computationally simple and efficent techniques for mea-
suring areas. The crowning jewel of ancient Egyptian geometry is the following
famous formula for squaring the circle.
Extract from the Rhind Papyrus (a copy of earlier papyri dated ~ 1900 B.C.),
Problem 50: "Method for calculating (the area of) a circular piece of ground of
diameter 9 rods. What is its area? Subtract the ninth part of the diameter leaving
8 parts. Multiply 8 × 8 which gives 64. Hence the area is 6 kh£ and 4 setat."
This formula assigns to a circle of diameter 9 the area of a square of side-
length 8. In modern notation it would be written as A = (8/9.2 r) 2 = 256/81 r 2
3.16 r 2, where A is the area of a circle of radius r. This surprisingly accurate
"experimental quadrature of the circle" approximates r r 2 with a relative er-
ror of about 1/2%, an accuracy that certainly exceeded any practical needs 4
millennia ago.
This formula was presented merely as an empirical fact, without any math-
ematical justification. But whoever was clever enough to have found the superb
pair of integers (8,9) must have wondered whether there might be a "better"
pair. The next pair that yields a more accurate approximation, (23, 26), reduces
the relative error only slightly to .36%. Even if the ancient Egyptians had known
this, they would have been justified in prefering their computationally much sim-
pler formula based on (8, 9) that provided useful results.
Proof-based Geometry: Pythagoras ~ 582-497 B.C. Ancient Egyptian
and Babylonian geometry knew not only individual facts (such as the ratio 8/9
serving to measure the area of a circle), but also general statements that apply
to an infinite class of objects. As an example, the theorem about right triangles,
"a 2 +b 2 = c 2 ", was known as an empirical fact. The more general a statement is,
the harder it is to verify by mere inspection of instances, and the more it calls for
mathematical proof -- a concept added by the Greeks. Pythagoras' innovation
was not the statement of the theorem that goes by his name; rather, it was a
geometric proof independent of numerical verification.
Axiomatic deductive geometry: Euclid ~- 325-? B.C. The concept of
proof soon raised the question as to what deductive steps are admissible. Eu-
clid's main contribution was the first attempt at a rigorous formalization of the
proof process. He showed how all of geometry then known could be derived from

Fig. 1. Any three similar figures erected over the sides of a right triangle obey Pythago-
ras' theorem.
axioms, postulates, and definitions. Examples from Euclid's 'Elements':
Axioms:
- Things equal to the same thing are equal
-
If equals are added to equals, the sums are equal
- If equals are subtracted from equals, ...
- Things which coincide with one another are equal to one another
- The whole is greater than the part
Postulates:
- A straight line can be drawn from any point to any other point
-
A finite straight line can be drawn continuously in a straight line
- A circle can be described with any point as center, and with a radius equal
to any finite straight line drawn from the center
- All right angles are equal to each other
- Given a straight line and any point not on this line, there is, through that
point, one and only one line that is parallel to the given line.
Definition 1: A point is that which has no part.
Although Euclid's aim of formalizing proofs was clear, his tool, natural lan-
guage, was inadequate to reach his ambitious goal. It took more than 2 millennia
until mathematical logic succeeded in substantially improving on Euclid's tech-
nique.
The examples above illustrate three drastically different approaches to geom-
etry, ranging from utilitarian pragmatism to abstract formality. In the course of
several millennia, different branches of geometry have returned many times to
these different styles. Computational or algorithmic geometry, the most recent
branch, shares the concerns of ancient Egyptian geometry for practicality, sim-
plicity and computational efficiency. These characteristics were decisive for the
ancient Egyptian surveyor, and they remain decisive for the programmer who
implements algorithms as robust programs.
3

2 Geometry Enters the Computer Age
Geometry found its way into computing in the late 1950s with the advent of com-
puter graphics, when Ivan Sutherland created the first graphics system, "Sketch-
pad". Pictures that appear on the screen are usually generated "on the fly" from
geometric models of 2-d or 3-d objects. Visibility algorithms that compute the
picture as seen from a given viewpoint ("hidden line and surface removal") were
among the earliest geometric algorithms studied in depth. The second major
application to rely on geometric computation was computer-aided design, CAD.
Here picture generation is less important than determining various geometric re-
lationships among objects located in space (e.g. touching, inside, separates) and
performing geometric operations on them. In "constructive solid geometry", for
example, complex objects are defined by means of boolean (set-theoretic) oper-
ations on simple building blocks. As an example, Fig. 2 shows a perforated slab
obtained as the set-difference of a box-shaped solid and a cylinder.
-~ Comouter
Compu ~"fModels lt~ ~'~ grap~hics~ f ~ ~
tational- if / ~ | [ Pietures//~ff/] ~ "~ Picture
ge°metry~k,~ ~ OS ~ C?mpunter~~--~~ prOcessing
Fig. 2. Four disciplines related to geometric computation and pictures.
Geometry also enters into two other specialty disciplines that involve pic-
tures. Picture processing typically operates on an array of pixels (gray-scale or
colored dots) and modifies this array in some way (e.g. contrast enhancement)
or extracts important features (e.g. boundary detection, medial axis transform).
Computer vision, as used in robotics, attempts to build a 3-d model of a spatial
configuration of objects from one or more pictures.
Computational geometry provides the technical know-how that guarantees an
effective (correct, reliable, efficient) use of geometry in computer applications of
all kinds. In its outlook on the types of problems to taclde and solutions to aim at,
computational geometry has returned to the roots of its history. It studies simple
practical problems, such as computing intersections of straight lines or answering
proximity queries among points. It seeks simple, robust, efficient algorithms, just
like the Egyptians' formula for squaring the circle. But of course the methods
brought to bear on these problems are modern and powerful: the know-how
developed over half a century of research in designing and analysing algorithms
and data structures applies directly to geometric problems. Today we expect
provably correct algorithms and programs, and mathematically rigorous error
bounds.
Developing mathematically rigorous methods is not easy. Geometric software
of the early days was characterized by the most straightforward techniques that
4

appeared to solve a given problem. This often led to unpleasant surprises. Fig. 3
shows a notorious bug in a polygon-painting routine. In scan conversion, the
electron beam is turned on and off as it scans the lines of the screen. Parity is
the simplest approach to keeping track of the inside-outside state of the current
beam position: every time the beam crosses a boundary segment of the polygon,
the on-off state of the beam must change. For this parity technique to work, both
line segments incident to a vertex must be recognized and counted as the beam
visits this vertex. Because of round-off errors in evaluating the linear expression
that determines the intersection between a line segment and the scan line, this
operation is not as trivial as it may appear.
a
b /
c r"
e
I J II
Fig. 3. The parity approach to area filling works for scan lines b and d, but may fail
for a, c, e~ and f.
For a polygon defined by line segments, a vertex is an exceptional boundary
point: a segment ends and another one starts, so the boundary tracing algorithm
must switch from one formula to another. A vertex is a locally degenerate con-
figuration for a data set of line segments. Two line segments in general position
either don't intersect, or they intersect in a point which is interior to both seg-
ments. But a vertex forces them to intersect at a common endpoint, thus causing
a degeneracy.
Degeneracy was again revealed as a source of trouble in the next major ap-
plication of geometric computation, CAD. Technical designs are often described
as boolean expressions over simple building blocks. For example, a window can
be considered as a hole in a wall, and the resulting surface may be described as
the difference (walt - window). If the window reaches all the way to the ground,
the wall and the window may have a common edge, a degenerate configuration.
Assume our building blocks are rectangles taken as closed point sets, i.e. all of
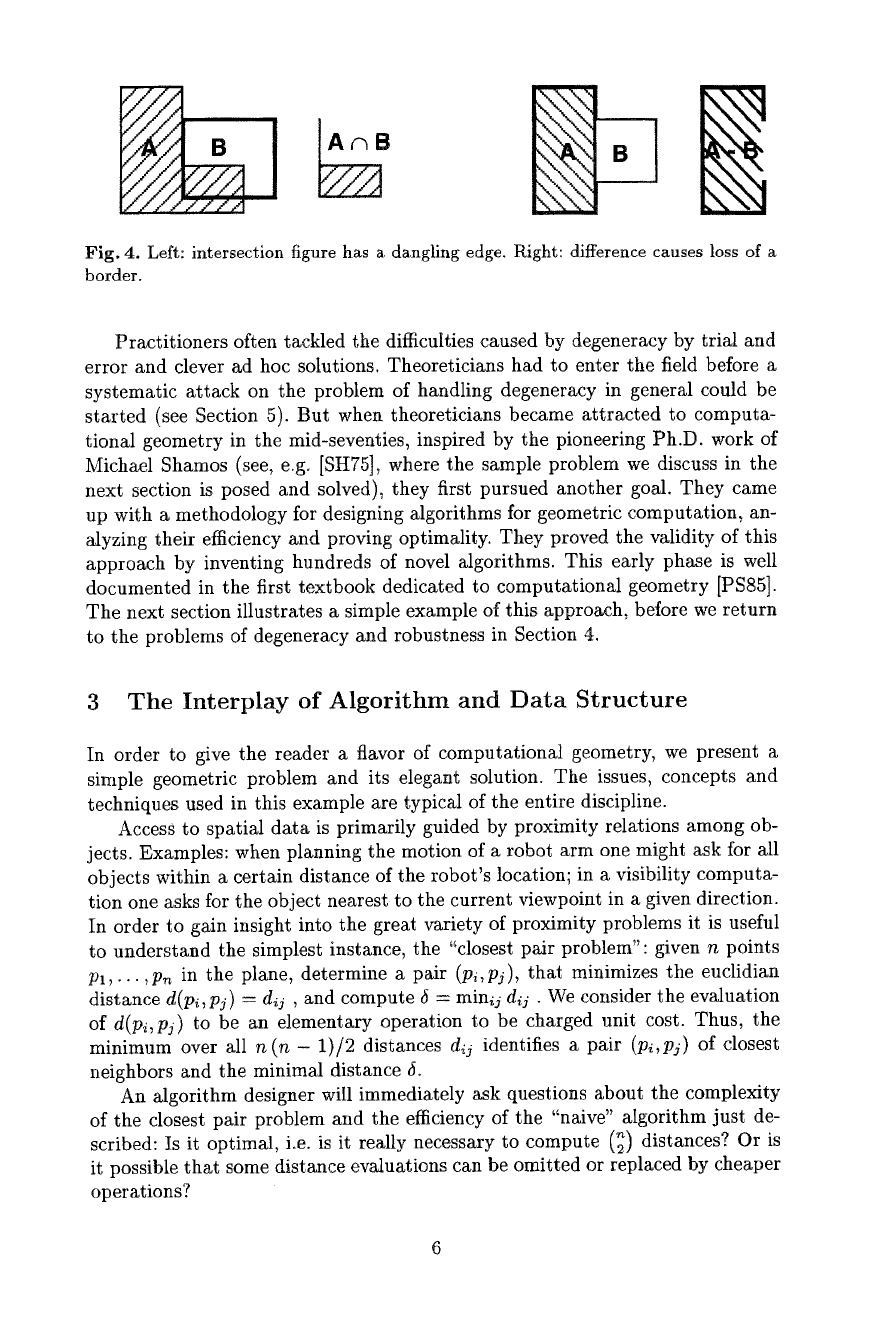
its boundary points belong to an object. Fig. 4 shows the result of set operations
on objects in degenerate position. The object resulting from the intersection has
an infinitely thin spike -- not a desirable model of a physical object, considering
that this design may control a metal cutting machine. The result of a difference
operation has lost part of its boundary. A sophisticated "calculus of regulariza-
tion" had to be developed in order to obtain a consistent theory of "constructive
solid geometry".
B
///A
Fig. 4. Left: intersection figure has a dangling edge. Right: difference causes loss of a
border.
Practitioners often tackled the difficulties caused by degeneracy by trial and
error and clever ad hoc solutions. Theoreticians had to enter the field before a
systematic attack on the problem of handling degeneracy in general could be
started (see Section 5). But when theoreticians became attracted to computa-
tional geometry in the mid-seventies, inspired by the pioneering Ph.D. work of
Michael Shamos (see, e.g. [SH75], where the sample problem we discuss in the
next section is posed and solved), they first pursued another goal. They came
up with a methodology for designing algorithms for geometric computation, an-
alyzing
their efficiency and proving optimality. They proved the validity of this
approach by inventing hundreds of novel algorithms. This early phase is well
documented in the first textbook dedicated to computational geometry [PS85].
The next section illustrates a simple exarnple of this approach, before we return
to the problems of degeneracy and robustness in Section 4.
3 The Interplay of Algorithm and Data Structure
In order to
give
the reader a flavor of computational geometry, we present a
simple geometric problem and its elegant solution. The issues, concepts and
techniques used in this example are typical of the entire discipline.
Access to spatial data is primarily guided by proximity relations among ob-
jects. Examples: when planning the motion of a robot arm one might ask for all
objects within a certain distance of the robot's location; in a visibility computa-
tion one asks for the object nearest to the current viewpoint in a given direction.
In order to gain insight into the great variety of proximity problems it is useful
to understand the simplest instance, the "closest pair problem": given n points
Pl,...,Pn in the plane, determine a pair (pi,Pj), that minimizes the euclidian
distance
d(p~,pj) = d~j
, and compute 5 = min~j
d~j .
We consider the evaluation
of
d(p~,pj)
to be an elementary operation to be charged unit cost. Thus, the
minimum over all n (n - 1)/2 distances
d~j
identifies a pair
(p~,pj)
of closest
neighbors and the minimal distance ~.
An algorithm designer will immediately ask questions about the complexity
of the closest pair problem and the efficiency of the "naive" algorithm just de-
scribed: Is it optimal, i.e. is it really necessary to compute (~) distances? Or is
it possible that some distance evaluations can be omitted or replaced by cheaper
operations?

• ~8 Pi Pn•
Pl Pjo
• •
Fig. 5. input data and result of a closest pair problem.
A rough sketch of a better algorithm [HNS88] shows that 5 n distance eval-
uations always suffice to determine a closest pair. This remarkable reduction
from O(n 2) geometric operations down to <9(n), however, is not entirely free. It
requires more complex data management, such as sorting, in order to carefully
keep track of all the relevant information that can be deduced from the few dis-
tance evaluations actually performed. As we will see, the resulting trade-off "less
geometry at the cost of more book-keeping" is beneficial. It leads to an
O(n
log n)
algorithm which is a clear improvement over the naive O(n 2) algorithm.
The algorithm to be presented is of a type called plane sweep or line sweep, a
paradigm that works well for many 2-dimensional problems. A vertical line, the
"moving front", sweeps across the data from left to right, without ever backing
up, processing "events" as it "sees" or encounters them. Sweep algorithms rely
on an invariant characteristic of incremental algorithms: at all times, the front
has accumulated the answer to the problem defined by the subset of data already
seen. Once it has scanned all the data, the answer to the entire problem is at
hand.
This algorithm schema is tailored to the closest pair problem as follows. The
n points Pl,...,Pn are the events to be processed, sorted by x-coordinate. The
sweep invariant Ik, for 2 < k < n, states: when the front has processed the events
Pl,... ,pk we know a closest pair
(Pi,Pj)
among the subset {Pl,... ,Pk} and its
distance 6 =
did.
The invariant I2 is initialized with 6 = d12. At termination,
k = n, I~ solves the closest pair problem. The essence of a sweep algorithm, as
in a proof by induction, is the step from k to k + 1.
Fig. 6 illustrates how an event p is processed. The minimal distance 6 among
the k points to the left of the front is known. The current event, the (k + 1)-
th point p, either changes the value of 6, or doesn't, depending on the data
configuration in its immediate vicinity. Specifically, a new closest pair and a new
6 come into existence iff there exists a point r within a semi-circle to the left of
the front with center p and radius 6. Imagine the plane covered by a sheet of
paper into which a semi-circular hole of the right shape and size has been cut,
positioned with its center over p. This window defines a semi-circular query. The
response to this query, i.e. all the points visible through the window, must be
examined. If there are none, the event p leaves the previous solution unchanged.
If any point r is visible, a new closer pair and a new value of 6 emerge.
We can now substantiate the claim stated earlier: "5 n distance evaluations
always suffice to determine a closest pair". How many points can be seen through
the semi-circular window? The sweep invariant implies that points to the left of
the front must have a distance > 6; and the window has radius 6. Clearly, only