Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

41
,
III
3.
Integration
or
the
Simplified
Equation
or
Motion
:Ci
(V
+
1)
~
Xi(V)
+ F['Pi(V),
'Pi(V
- 1),
...
] ,
(3.27)
w!ln"!! F is a linear combination
of
the
functions
'Pi
at
previous intervals.
'I '
It
ere exists a large
number
of
integration
formulae which differ
in
complex-
il
,y, i.e.
computing
time, sensitivity to numerical
instability
and
accuracy [22].
'l'
lte
ones
best
known
are
square-, trapezoidal-
and
Simpsons-rules, further-
IIl<lr
e
the
Newton-
and
Runge-Kutta-algorithms.
Because
of
its favourable
propertí
es
the
last mentioned
algorithm
is widely usedj
it
is usually avail-
:th\e as a complete
subroutine
so
that
only
the
functions
'Pi
and
the
initial
CO
llditions
Xi(O)
need
to
be inserted as well as
the
integration
interval
Llt
;\,
11<1
the
time
t
2
at
which
the
integration
is
to
be
terminated.
Often
the
in-
Lq
,;ration interval Llt is chosen automatically, depending
on
the
functions
(Pi a
nd
a specified accuracy limito We
are
not
going
to
discuss details of
IIll1nerical integrationj
there
can
be
subtle
problems
interrelating
step
size,
<t.c
cnracy
and
numerical stability. Since a large
number
of
steps
may
have
Lo
he
computed
sequentially, even
minute
systematic
errors
can
accumulate
IIl1d
er unfavourable conditions.
Obvíously
the
two differential equations, Eqs. (2.1), (2.2), correspond
to
I.his
general schemej when
taking
the
angle
of
rotation
into account,
the
order is n =
2,
i.
e.
a very small system
of
differential equations results.
The
,~
Lat
e
v
ar
iables
are
the
rotational
01' linear speed
and
the
angle
of
rotation
or
I.Iw
liJl
ea
r distance.
These
variables represent
storage
effects and, hence,
are
C()lItiJlllOUS.
If
a more
accurate
description is desired,
the
electrical
transients
!Iav
(! to
be
included,
thus
increasing the
number
of
differential
equations
and
sl"d,
(!
variablesj this is discussed in
later
sections.
Wlwll a
tímetable
for a
branch
of
a railway is
to
be computed,
it
is neces-
l:a
l'y 1,0
take
into account
the
mass M
of
the
trains
, including
the
equivalent
ill('rlú
01'
the
wheel sets,
the
speed-dependent
driving forces
of
the
loco-
II
II,
Li
v(!s,
dista
nce-dependent
conditions, such as grades, curves
or
speed re-
Il
l.ricl.io!l
s, as well as
maximum
values for deceleration.
The
task
requires
the
:;i
111111
tancous solutíon
of
the
differential equations for velo city
and
distance
dv
1
-1
--
= M
[JM(V,
t) -
h(s,
v, t)] ,
( t
ds
dt =
V,
wll(!l'('
1M
is
the
internal
driving force of
the
locomotive
and
h is
the
to-
tal
loar!
force, íncluding frictional
and
braking
forces
a.s
well as
gravitational
l'ol'('
cs
Oll
grades.
The
task
of
finding an acceptaiJl('
tillldable
is
an
optimisa-
I,
i(lll
prohlc
lJI
of
cO
Ilside
rable
complexity, sinc(' lIlally cOllstraiJlts
and
bound-
:
lr
,Y
cOlldi(
,
ioIl
S
llIu
st
h(
! tõlken into
aCCOllnl..
'l'llú; indlld,':;
Lhe
Il
S(!
of
th
e
same
Lr:lt'k
I,y
I.r:tills Itavillg diffcrcllt I\.('cdcra(.ioll
:1
,
lId
vl'lociLy
lilllÍts, such
a.'i
in-
L('IT
,
iLy
<lI'
II(
!il
VY
I
~
o()d
:;
(,
nlÍIIH
.
Th
e
pro!'I"11I
(
'!l
1I
lillly
IIl'
Holv"d
I,
y itmatioll,
...
·p(
·
II.1.(
·
(lIy
iIlL(
·I'
,I'II
,l.illl',I':qH. (2
.1)
,
('
.l.'2
)
wi1.1t
dl
ll'(
'I'I·lIl. llIl
l.i
lll (·
(lIldil.i(lII
K. 'J'oday
1.1
11
11
1:
1II
t.
,y
piC'
l\.
1
1'1,,1,),
'
111
r"
"
11I111I(
'rk
ld 1
III."
I'
,
I'
/
tI
,ll lI' w
ll
,
1t
I
I,
dil',
d,1I1
(IIHlplll,(·
r.
IIl1
wl'v
\'I . I
II
1.11
,'
1"
1'11
,
11
, I
lI
ld
1.11
I"
,
~iI
,lv,·
,
d
Cl
ll
llil
l/
tll
y
lI
i.
I"I',
1·
.!"I
.1.1<
ItI
1111'111,,,11:.
3.3 Numerical
and
Graphical
Integration
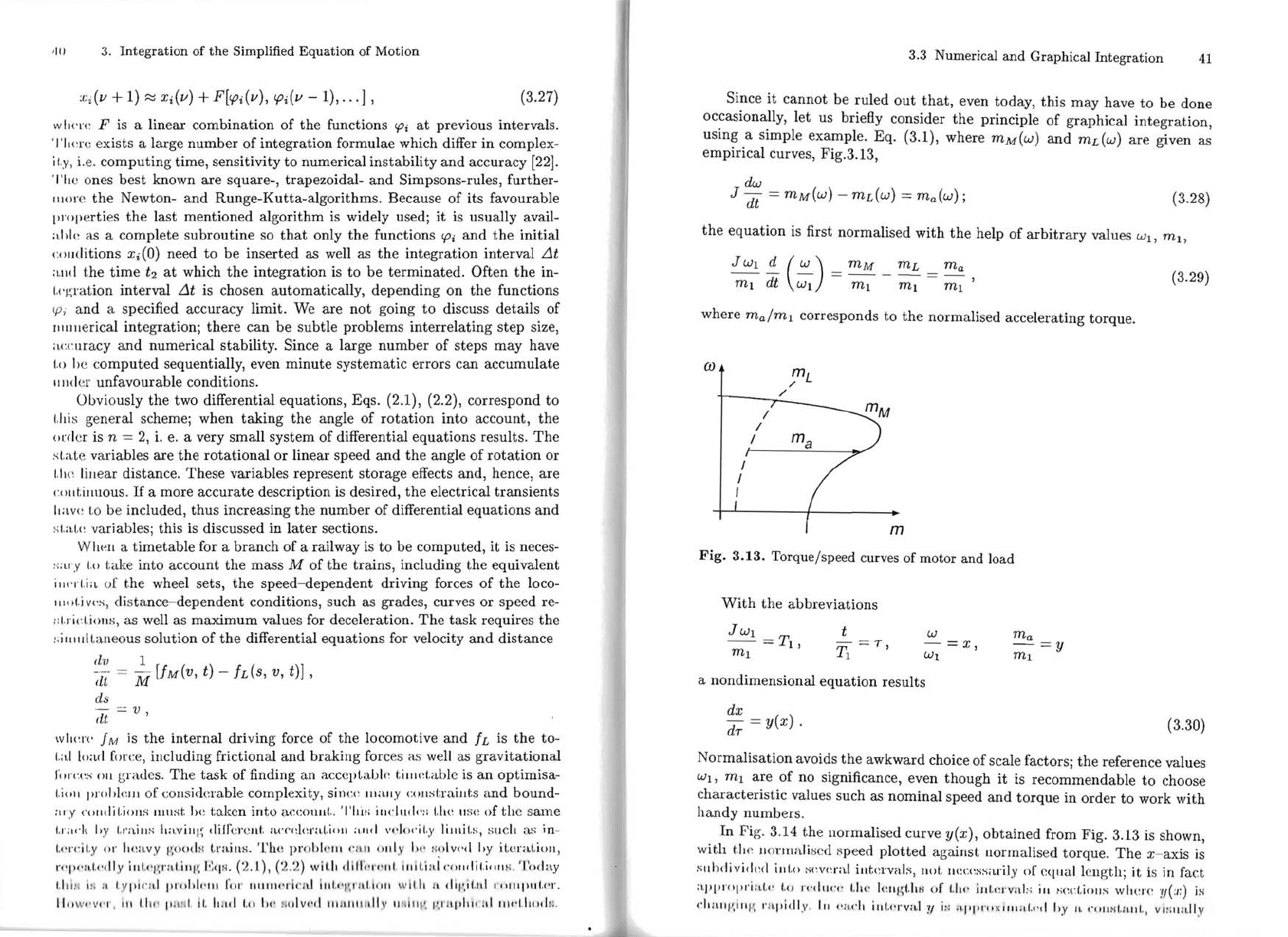
Since
it
cannot
be ruled
out
that,
even today,
this
may have
to
be
done
occasionally, let us briefly consider
the
principIe
of
graphical
integration,
using a simple example. Eq. (3.1), where mM(w)
and
mdw)
are
given as
empirical curves,
Fig
.3.13,
dw
J
di
=
mM(w)
-
mdw)
=
ma(w);
(3.28)
the
equation
is first normalised
with
the
help
of
arbitrary
values
WI,
mI,
J
WI
~
(~)
_
mM
_ mL _
ma
(3
.29)
mI
dt
WI
-
mI mI
-
mI
'
where
ma/mI
corresponds to
the
normalised accelerating torque.
cu
mL
/
/
/
/
/
m
Fig.
3.13.
Torque/speed
curves
or
motor
and
load
With
the
abbreviations
JWI
=
TI,
t
ma
-T=r
W =
X,
mI
mI
=y
1 '
WI
a nondimensional
equation
results
dx
dr
=y(x).
(3.30)
Normalisation
avoids
the
awkward choice
of
scale factors;
the
reference values
WI,
mI
are
of
no significance, even
though
it
is recommendable
to
choose
characteristic
values such as
nominal
speed
and
torque
in
order
to
work with
handy
numbers
.
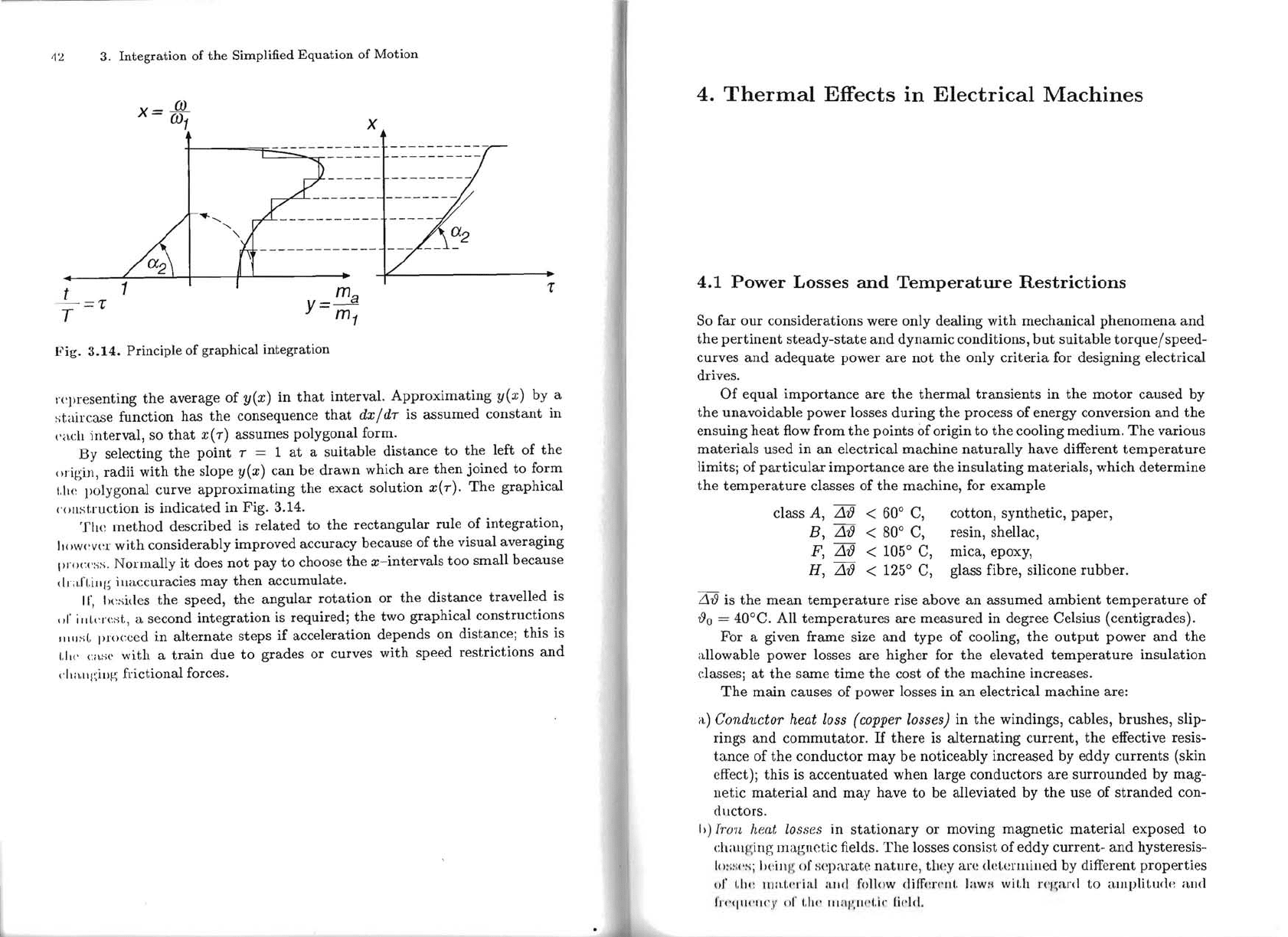
ln
Fig. 3.14
the
normalised curve
y(x),
obtained
from Fig. 3.13 is shown,
with
t.lt
p
lI
ol:llIn
lif
;cd speed
plotted
against Ilormalised torque.
The
x- axis
is
sllbdividcd
illl.o
scv(
~
r;tl
illt(!l'vals,
JlOt,
!)(!cPHsarily
of
c<.J.
l1al
lcn
gt
h; it is in fact
:l.pPl'Opri:i.I
,,'
1.0
/'C'dll('"
1,
111'
1(
!
lIgLhH
01'
1.
I
li'
illkrv:d:;
iII
/;
cdiolJS wheJ'c
y(:,
:) iH
('Ia
ii
"1',1
" I',
I'
lI.
lIidl
y,
111":,,1'11
illl.(·rV:I
,1 y
i:
: ' i.J'I"'
II
'
"II
:
tf
,
(·cJ
h,Y
II,
(·IIII
I<II.
il.III.
,
vl
!i
ll
a
lly
I\~
3.
Integration
of
the
Simplified
Equation
of
Motion
01
x=
01
1
x
-----..........
.......
ma
y=
m
1
t 1
r
T
=r
Fig.
3.14.
PrincipIe
of
graphical
integration
rCJlr
esenting
the
average of y(x) in
that
interval. Approximating y(x) by a
~it.airc
as
e
function has
the
consequence
that
dx
j
dr
is assumed
constant
in
('<l.c!t
interval, so
that
x( r) assumes polygonal
formo
By selecting
the
point
r = 1
at
a suitable distance
to
the
left of
the
origin,
radii with
the
slope y(x)
can
be drawn which are
then
joined to form
Lhe
Jlolygonal curve
approximating
the
exact solution x( r).
The
graphical
(,()Ilst
,ruction is indicated in Fig. 3.14.
Tlt
e
method
described is related
to
the
rectangular
rule of integration,
"Ow(
'
v(
~
r
with
considerably improved accuracy because of
the
visual averaging
pro
('.
('
:.;s.
Normally
it
does
not
pay
to
choose
the
x-intervals
too
small because
dri
lJl.illg
illaccuracies may
then
accumulate.
I
r,
I
)(
~s
i<l
e
s
the speed,
the
angular
rotation
or
the
distance travelled is
"r
iril
,
('r<
:s
t, a second
integration
is required;
the
two graphical constructions
rlllr~il
procced in
alternate
steps if acceleration depends on distance; this
is
1.11<'
<:il
,s
e with a
train
due
to
grades or curves with speed restrictions
and
cltil,lI
g
ill
g frictional forces.
4.
Thermal
Effects
in
Electrical
Machines
4.1
Power
Losses
and
Temperature
Restrictions
80 far
our
considerations were only dealing with mechanical
phenomena
and
the
pertinent
steady-state
and
dynamic conditions,
but
suitable
torquejspeed-
curves
and
adequate
power
are
not
the
only
criteria
for designing electrical
drives.
Of
equal
importance
are
the
thermal
transients
in
the
motor
caused by
the
unavoidable power losses during
the
process of energy conversion
and
the
ensuing
heat
flow from
the
points of origin
to
the
cooling medium.
The
various
materiais used in
an
electrical machine
naturally
have different
temperature
limits; of
particular
importance
are
the
insulating materiais, which determine
the
temperature
classes of
the
machine, for example
class
A,
Lh9
< 60° C,
cotton, synthetic,
paper,
B,
Lh9
< 80° C,
resin, shellac,
F,
Lh9
< 105° C,
mica, epoxy,
H,
Lh9
< 125° C,
glass fibre, silicone rubber.
..119
is
the
mean
temperature
rise above
an
assumed ambient
temperature
of
19
0
= 40°C. All
temperatures
are measured in degree Celsius (centigrades).
For a given frame size
and
type
of cooling,
the
output
power
and
the
allowable power losses
are
higher for
the
elevated
temperature
insulation
classes;
at
the
sarne
time
the
cost of
the
machine increases.
The
main
causes of power losses in
an
electrical machine are:
a)
Conductor
heat loss (copper losses) in
the
windings, cables, brushes, slip-
rings
and
commutator.
If
there
is
alternating
current,
the
effective resis-
tance
of
the
conductor
may
be noticeably increased by eddy
currents
(skin
e
fFect);
this
is
accentuated
when large conductors
are
surrounded by mag-
netic
material
and
may have
to
be alleviated by
the
use of
stranded
con-
ductors.
h) Irou heat losses in
stationary
or moving magnetic
material
exposed
to
dl<tll
ging mar;nctic fields.
The
losses consist of eddy current-
and
hysteresis-
I()
~~;
('s;
IwiJl
I
~
of
separat.c natllfe, tlH!y are
<i(~L
e
nllilled
by different properties
III'
I,h.,
llIi1.!.nr·ild n
lld
follow
dirfmerr!.
la.
W:l
wil.h n :
gard
to
;,
unplit.udn
I\.m!
/'''',!II.'rH'
,V'
"r t.llI'
Itl
n
/',rrdi
..
lidd
.
45
,1,1
4.
Thermal
Effects
in
Electrical Machines
I' )
I,~,.ú;tion
lasses,
including
bearing-,
brush-
and
ventilation
losses.
'I'he various
types
of
losses
depend
in
complicated
fashion
on
the
oper-
:d.iollal
state
of
the
machine.
The
main
factors
of
influence
are
speed
and
lo:ul
torque,
as
well
as
voltages
and
currents
with
their
RMS-values
and
w:wdorms.
111
order
to
indu
ce
heat
flow from
the
points
of
origin
to
the
cooling
::llrf'aces, a
temperature
gradient
arises inside
the
machine
determining
the
<ii
rl'ct.ion
and
intensity
of
the
heat
flow .
The
temperatures
are
usually
highest
i
II
I.I\(~
windings
because
the
loss
density
in
the
conductors
being covered
by
illslII<üing
material
is high; also
the
windings
are
partly
embedded
in
slots
and
tlIIIS
are
not
directly
exposed
to
the
cooling air.
The
hot-spot
temperature
wiUt
cla
ss B
insulation
could
be, for
example,
1?max
=
L119
+
(Ll-!9
max
-
L119)
+ {)o
40°C =
130°C.
WlwlI
operating
the
machine
at
elevated
ambient
temperatures,
e.g.
in
the
I.ropies,
the
power
rating
may
have
to
be
reduced.
An
accurate
prediction
of
the
heat
flow
and
the
temperature
distribution
iII
:w
dect.rical
machine
is exceedingly difficult;
this
is
due
to
the
complex
I';(
'
ollldrical
s
hapes,
the
use
of
heterogeneous
and
anisotropic
materiaIs
(lam-
ill:J!,I'd
irou,
insulation),
furthermore
the
complicated
laws
ofheat
generation
wiLh
n'sl)(~d
to
space
and
time,
as
well
as
the
different cooling
conditions.
A b "
Lhe
l)(~al.
conductivity
of
the
various
materiaIs
does
not
differ by
orders
II/"
1I1:J.1',lIiLlldc',
as
is
the
case
with
electrical
or
magnetic
fields. As a
result,
ti
... 1."II'IWra(.llre
distribution
can
only
be
computed
in
restricted
sections
and
wli,1I
(·oll.'ii(krable simplifications.
TI",
IISI~r
(Ir
dectrical
drives
has
normally
little
influence
on
the
tempera-
1.111'"
di
:-
;(
.rihlll.ioll
within
the
machine.
He
must
be
confident
that
the
designer
II
/lS
dlllSI'1I
slIHiciently
large
conductors
and
cooling
channels
so
as
not
to
I· F
I"'.!
LClllpl~rature
limits
under
specified
operating
conditions.
With
this
IU
il'i
lllll(.Lioll
iI.
is
usually
adequate
to
drastically
simplify
the
thermal
model
,,(
Lili'.
"lllOlor"
by
regarding
it
as
a
homogeneous
body
exhibiting
thermal
: i
L()ril-f.'.I~,
whose
internal
transients
are
unknown
and
of
no
interest.
Naturally,
::<,,'11
a I:rude rnodel
cannot
offer
any
detailed
information
on
specific
internal
I.I11'I'IIlal
I ~
ollditions.
f
1.~
LIeating
of
a
Homogeneous
Body
'I'I,,~
:;illlplifi(~d
l
,
hl
~
J'lllallII()dd
is
charactl'~ris('d
hy l.hc followiug aSSlIlllptiolls,
I
"i
'
r',
. ,I. I ;
fi
hll
I
IIOI
'l
"lIf'IIII
II
1""lv
wil.lt
tllI'
:illr(",("I
'
11,
1.1
... I'. I 11'1'1
II
ii.
I
(':Ip
:u '
il
'.y
(),
1111':1.
t.
lIlI'd
iII
\lV
II '
C,
1
111..1
1.1
..
'
1111'
1
1.11
::111
/'
lI,('
I'
1."1111'('.
,,
"
1,111"
,
,'I
I;
: 1.... \.
1"'1
I"v
I.
hl
' illjlllL
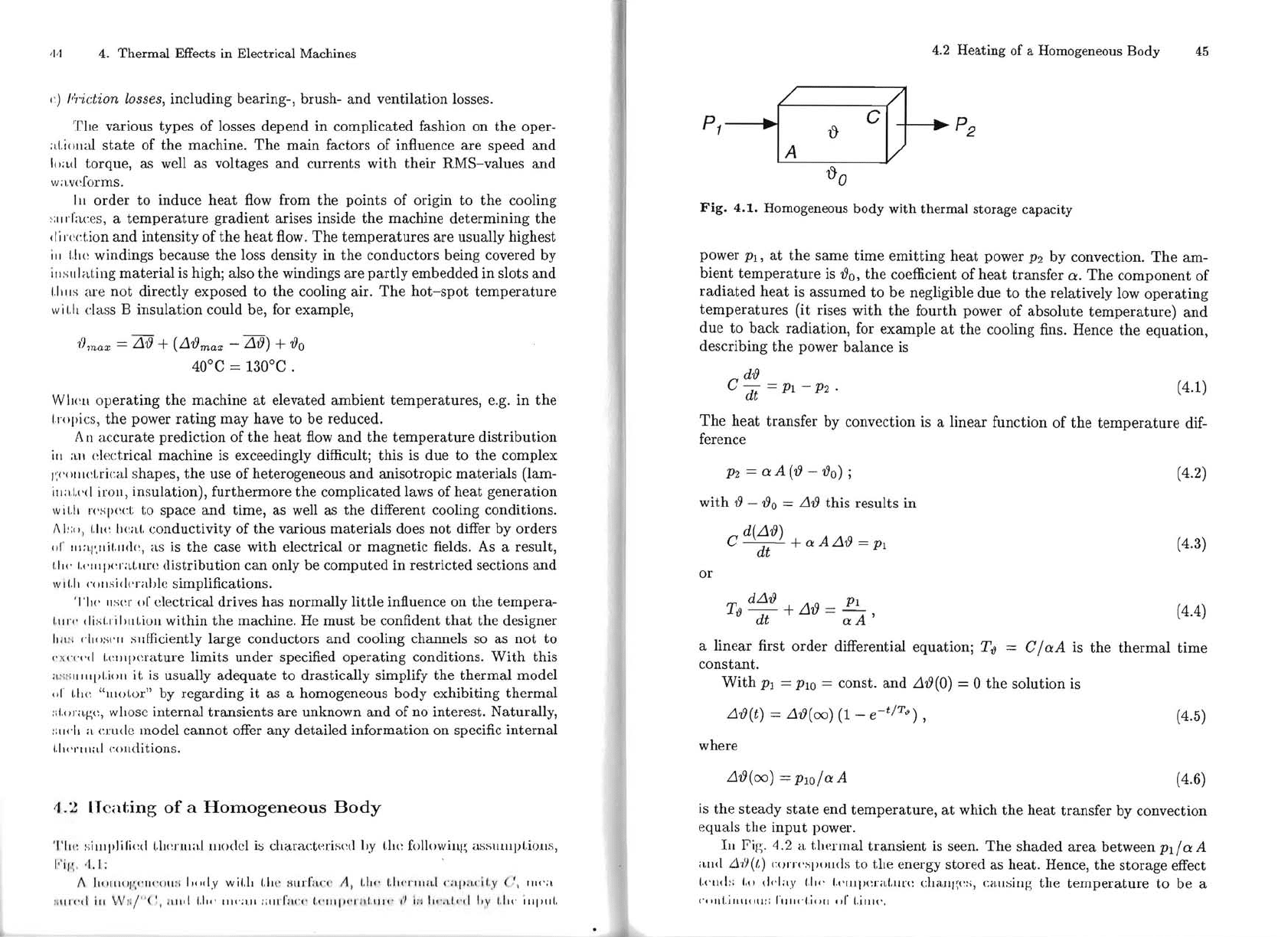
4.2
Heating
or
a Homogeneous
Body
[ o
Pj
~IA
t)
C
~P2
t}O
Fig.
4.1.
Homogeneous
body
with
thermal
storage
capacity
power
Pl,
at
the
same
time
emitting
heat
power
pz
by
convection.
The
am-
bient
temperature
is
{)o,
the
coefficient
of
heat
transfer
a.
The
component
of
radiated
heat
is
assumed
to
be
negligible
due
to
the
relatively
low
operating
temperatures
(it rises
with
the
fourth
power
of
absolute
temperature)
and
due
to
back
radiation,
for
example
at
the
cooling
fins. Hence
the
equation,
describing
the
power
balance
is
d{)
C-
=Pl
-P2.
(4.1)
dt
The
heat
transfer
by
convection
is a
linear
function
of
the
temperature
dif-
ference
pz = a A
({)
- {)o) ;
(4.2)
with
{)
- {)o = L1{)
this
results
in
d(L1{))
+ a A L1{) =
Pl
C~
(4.3)
or
T
dL1{)
L1{) =
~
(4.4)
{)
dt
+ a A '
a
linear
first
order
differential
equation;
T{)
=
C/
aA
is
the
thermal
time
constant.
With
Pl =
PlO
=consto
and
L1{)(O)
=O
the
solution
is
L1{)(t)
=
L1{)(oo)
(1
-
e-t/T~)
,
(4.5)
where
L1{)(oo)
= PlO/a A
(4.6)
is
the
steady
state
end
temperature,
at
which
the
heat
transfer
by
convection
equals
the
input
power.
lu
Fir;. 4.2 a
tlwrrnal
transient
is seen.
The
shaded
area
between
pI/a
A
aud
Lh'l(t,)
c()ITI',~p()llds
to
the
energy
stored
as
heat.
Hence,
the
storage
effect
1.1'
11(1:
:
1.11
dc'I:I,)'
1.
11f'
1
.
l'llll)(~l'at.lIn!
chaJlg(!:;, ea.llsiJlp;
the
temperature
to
be
a
(""lIl.illllllll~:
1'11111'1.;1111
III'
1.
;1111',

47
~
ti
4.
Thermal
Effects
in
El
e
ctrical
Machines
P10
L1~
\
I
~
L
W(oo)
=
aA
L1~(O)
Change
of
stored thermal
energy
T
JJ
heating transient
T
JJ
cooling-off transient
Fig.
4.2.
Thermal
transients
The
approximation incurred with this simple model is mainly due to
the
assumption
of
evenly
distributed
heat
sources
in
the
homogeneous
body
and
t\w
Il
eglect
of
an
internal
heat
flow;
hence,
transportation
delays are
not
rOlltained
in
the
simplified model.
A rough
estimate
of a typical
thermallag
may
be
derived from
the
data
sll('d. of
an
enclosed 100
kW
standard
induction
motor
cooled by
an
external
\';\.
1I
(TEFC):
100 k
W,
nominal power
M
~
OO
kg, mass
, I
0.92, nominal efliciency
. I,
,')
('
x
,)
GO
°C
is
the
steady-state
temperature
rise due
to
the
losses
PI
at
)'
/I
11<IIlIill:d
p()w(~r
1'1
1'"
(~-1)
LIli'
C
(l
lI
v(
'
cl.ive
heat conductivity is
PI
Ir
11.
L119(oo)
-:"c
J\
h
S
lllllill~
that
the
motor
consists
of
solid iron having
the
specific
heat
CFe,
I.
!tI
,
hea.L
capacity
is
c =
Cl"e
M.
'I'
hi
s y
idds
the
thermal
time
constant
~
= C/"e M
Ll19(oo)
= 0.48 kWsj kgOC 800 kg 50°C
~
34
mino
"
;'
}
n
11.
.!.::.'L
p . 9 kW
71
11.
'l'y
pi
ra
ll
y,
Lhcl'lllal
Lrll.llsj('lI(.s
ar(:
IIl1l
ch I;!ow(:r I.
hall
d(
,ct. rj(·:t! 01' J11(·('hallica.!
1'1\',
'
1'1.
::
()I'
((1111 ::" , 1.
111'\'"
1
1.1
'
('
(·:
x('(:p\.j(lIl
H :1
111'11
I
II
'
di
/l
l(
1II(1(.tll
·H,
wlll'l'!
' 1.
111'
nr
-
111
:.1.
111"
Wl
ll
d i
JlI'
, Irl
I'
Ji
ui<'d di
,.,·(
·l.Iy
(III
!III
I
lI
li
lllll
,I,I
II
P, dllllt I
UIfI
IJl
IIIIH'IIIII ':I
V('I
'y
4.2
Heating
of
a Homogeneous
Body
little
thermal
storage capacity.
The
following
time
scales are usually valid
with
electrical machines:
electromagnetic mechanical
thermal
transients
0.1 - 100 ms
10
ms -
10
s 10 - 60 min
Travelling wave
phenomena
in
windings are
not
considered; they are faster
yet by several orders of magnitude.
The
large difference
of
more
than
a factor
of 100 between
the
time
scales of mechanical
and
thermal
transients usually
permits
a
separate
treatment
which results
in
considerable simplification.
The
heat
transfer by convection from a ventilated surface depends strongly
on
the
velocity of
the
cooling air;
the
usual range
of
the
transfer coefficient is
a=
50t0500WtCm
2
at
Ll79
=
50
°C this results in a power
flow
by convection
of
P2c
j 2
A = 2.5 to
25
kW
m ;
the
dependence of
the
heat
transfer on
the
velo city of
the
cooling air
has
the
consequence
that
self-cooled motors exhibit
at
standstill a cooling
time
constant
that
is
much longer
than
the
thermal
time
constant
of
the
motor
when running. Larger
motors
operating
at
variable speed
and
load are usually
provided
with
separate
forced cooling, causing
the
motor
speed
to
have
little
effect
on
the
cooling conditions.
To show
that
the
heat
transfer by
radiation
can normally be neglected, a
rough
estimate
of
the
power
flow
by radiation is given for comparison.
A "black
body"
emits
to
the
environment power by
radiation
according
to
Boltzmanns
law,
PR
=
uT
4
,
A
where
2
u =
5.710-
8
W
jK
4
m
is
the
coefficient
ofradiation
and
T
the
absolute
temperature.
With
19
= 70°C,
i.e. T
=
343
K,
the
power
flow
due
to
radiation
is
2
PR
=0.
77kWjm
.
A
This
relatively small
amount
is
further
reduced by inverse radiation. AIso,
the
ra
cli
ation coefficieIlt of a
motor
surface
is
much lower
than
that
of
a "black
hod
y" .
- 2008 — 2024 «СтудМед»