AckermannTh. (ed) Wind Power in Power Systems
Подождите немного. Документ загружается.


//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 631 – [629–652/24]
17.12.2004 10:51PM
system will respond in the analysed state to incremental changes in the state variables.
The results of the frequency domain analysis consist of the following:
.
An overview of the system’s eigenvalues; in case of complex eigenvalues, the damping
and frequency of the corresponding oscillation can be calculated from the eigenvalue,
whereas in case of real eigenvalues the associated time constant can be calculated.
.
An overview of the participation factors for each of the eigenvalues or at least those
eigenvalues that are considered of importance, because their damping is low, for
instance; the participation factors contain information on the relationship between
the calculated eigenvalues and the system’s state variables. This information can be
used to identify the state variables that can be used to affect a certain eigenvalue.
For more detailed information on the frequency domain analysis of a power system,
including the calculation and the use of participation factors, see, for example, Kundur
(1994).
The two methods mentioned are complemen tary. Dynamics simulation can analyse
the complete response of a system to a disturbance. However, the simulation contains
information on the system’s response only to the specific disturbanc e that is studied. For
other disturbances new simulations have to be carried out. Frequency domain analysis,
in contrast, yields a complete overview of the response to an incremen tal change in any
of the system’s state variables for the system in its current operating state. However,
owing to the nonlinear ity of a power system, the results are valid only for the invest i-
gated power system topology and for small changes in the state variables. If the
topology of the power system is changed or the state variables change significantly
(e.g. by connecting or disconnecting a load or a line or by changing the operating points
of the generators) different eigenvalues will result, because if the chan ges in state
variables are large the linearised representation of the system will no longer be valid.
28.3 Actual Wind Turbine Types
The vast majority of wind turbines that are currently being installed use one of three
main types of electromechanical conversion system. The first type is known as the
Danish concept. In Chapter 4, the Danish concept is introduced as Type A.
(1)
An
(asynchronous) squirrel cage induction generator is used to convert the mechanical
energy into electricity. Owing to the different operating speeds of the wind turbine rotor
and the generator, a gearbox is necessary to match these speeds. The generator slip
slightly varies with the amount of generated power and is therefore not entirely con-
stant. However, because these speed variations are in the order of 1%, this wind turbine
type is normally referred to as a constant-speed or fixed-speed wind turbine. The
Danish, or constant-speed, design is nowadays nearly always combined with stall
control of the aerodynamic power, although pitch-controlled constant-speed wind
turbine types have been built, too.
(1)
For definitions of wind turbine Types A–D, see Section 4.2.3.
Wind Power in Power Systems 631

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 632 – [629–652/24]
17.12.2004 10:51PM
The second type uses a doubly fed induction generator instead of a squirrel cage
induction generator, introduced in Chapter 4 as Type C. Similar to the previous
type, it needs a gearbox. The stator winding of the generator is coupled to the grid
and the rotor winding to a power electronic converter, nowadays usually a back-to-
back voltage source converter with current control loops. In this way, the electrical
and mechanical rotor frequencies are decoupled, because the power electronic
converter compensates the difference between mechanical and electrical frequency
by injecting a rotor current with variable frequency. Variable-speed operation
becomes possible. That means that the mechanical rotor speed can be controlled
according to a certain goal function, such as energy yield maximisation or noise
minimisation. The rotor speed is controlled by changing the generator power in
such a way that it equals the value derived from the goal function. In this type of
conversion system, the control of the aerodynamic power is usually performed by
pitch control.
The third type is called the direct-drive wind turbine because it does not need a
gearbox. It corresponds to Type D in Chapter 4. A low-speed multipole synchronous
ring generator with the same rotational speed as the wind turbine rotor converts the
mechanical energy into electricity. The generator can have a wound rotor or a rotor with
permanent magnets. The stator is not coupled directly to the grid but to a power
electronic conv erter. This may consist of a back-to-back voltage source converter or a
diode rectifier with a single voltage source converter. The electronic converter makes it
possible to operate the wind turbine at variable speed. Similar to the case for Type C
wind turbines, pitch control limits the mechanical power input. The three main wind
turbine types are illustrated in Figure 19.2 (page 421).
Apart from the wind turbine types depicted in Figure 19.2, other types have been
developed and used. They include wind turbines with directly grid-coupled synchronous
generators and with conventional synchronous as well as squirrel cage induction gen-
erators combined with a gearbox and coupled to the grid with a full-scale power
electronic converter. Currently, there are hardly any of these wind turbine types on
the market, though, and we will not take them into consideration here.
28.4 Impact of Wind Power on Transient Stability
28.4.1 Dynamic behaviour of wind turbin e types
28.4.1.1 Constant-speed wind turbines
Constant-speed wind turbines (Type A) use a directly grid-coupled squirrel cage induc-
tion generator to convert mechanical into elect rical power. The behaviour of a constant-
speed wind turbine is determined by the intrinsic relationship between active power,
reactive power, terminal voltage and the rotor speed of the squirrel cage induction
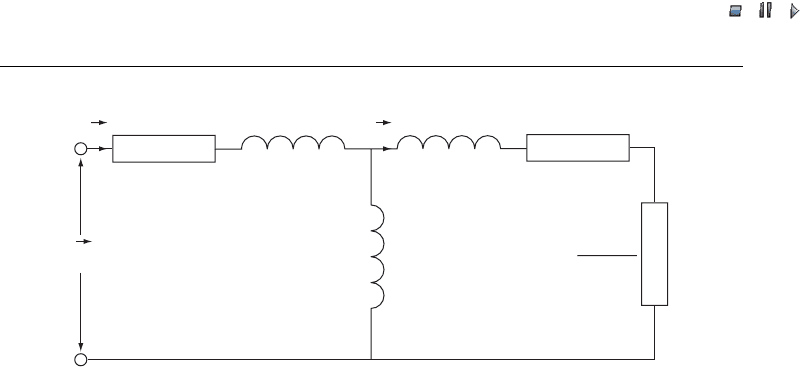
generator. This relationship can be studied using the network equivalent, depicted in
Figure 28.1 (Kundur, 1994). In this figure, U is the voltage, I is current, s the slip, R the
resistance and L the reactance. The indices s, t, s, m and r stand for leakage, terminal,
stator, mutual and rotor, respectively. The values of the generator parameters are given
in Table 25.3 (page 567).
632 Impacts on Power System Dynamics
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 633 – [629–652/24]
17.12.2004 10:51PM
Squirrel cage induction generators are likely to become unstable after a voltage drop
(Van Cutsem and Vournas, 1998). The explanation for this is as follows. Figure 19.3
(page 422) illustrates the relationship between active power output and rotor slip as well as
between reactive power consumption and rotor slip with the terminal voltage U
t
as a
parameter. It shows that:
.
The lower the terminal voltage, the larger the absolute value of the rotor slip that
corresponds to a certain amount of active power generation.
.
The larger the rotor slip, the larger the reactive power consumption.
If the generator terminal voltage drops (e.g. because of a fault) only a small amount of
electrical power can be fed into the grid because the generated electrical power is
proportional to the terminal voltage. However, the wind continues to supply mechanical
power. Owing to the resulting imbalance between supplied mechanical power and
generated electrical power, the generator speeds up. This results in a decreasing slip.
Once the fault is cleared, the squirrel cage induction generator draws a large amount of
reactive power from the grid because of its high rotational speed, as can be seen in
Figure 19.3(b). Owing to this reactive power consumption, it can happen that the
terminal voltage recovers only relatively slowly after the fault is cleared.
However, if the generator terminal voltage is low, the electrical power generated at a
given slip is lower than that at nominal terminal voltage, as shown in Figure 19.3(a)
(page 422). If the rotor accelerates faster than the terminal voltage is restored, the
reactive power consumption continues to increase. This leads to a decrease in the
terminal voltage and thus to a further deterioration of the balance between mechanical
and electrical power and to a further acceleration of the rotor. Eventually, the voltage at
the wi nd turbine will collapse. It may then be necessary to disconnect the turbine from
the grid to allow the grid voltage to restore.
Depending on the design and the settings of its protection system, the wind turbine
will either be stopped by its undervoltage protection or accelerate further and be
stopped and disconnected by its overspeed protection. It can only be reconnected after
U
t
l
t
L
s
R
r
jL
sσ
jL
m
jL
rσ
l
r
R
r
(1 – s)
s
Figure 28.1 Network equivalent of squirrel cage induction generator. Note: U ¼voltage;
I ¼current; s ¼slip; j ¼
ffiffiffiffiffiffiffi
1
p
; L ¼reactance; R ¼resistance; subscripts s, t, s, m and r refer to
leakage, terminal, stator, mutual and rotor, respectively
Wind Power in Power Systems 633

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 634 – [629–652/24]
17.12.2004 10:51PM
restoration of the grid voltage in the affected parts of the network. That may take
several minutes, particularly if other protection systems were activated during the
disturbance too. The exact quantitative behaviour of the terminal voltage and the
required restoration time depend on the actual wind speed, wi nd turbine characteristics,
network topology and protection system settings.
Wherever possible, a fault should be removed from the system before the wind
turbine becomes unstable because of the mechanism pointed out above. Otherwise, a
large amount of generation may be lost. The fault should be cleared quickly in order to
limit the overspeeding and, consequently, to limit the amount of reactive power that is
consumed for restoring the voltage. The time that is available to clear the fault before
it leads to voltage and rotor speed instability is called the critical clearing time.
Akhmatov et al. (2003) propose a number of countermeasures to prevent instability of
constant speed wind turbines (see also Chapter 29):
.
Constant-speed wind turbines, which are usually stall-controlled, can be equipped with
pitch drives that quickly increase the pitch angle when an acceleration of the rotor is
detected. This reduces the mechanical power and consequently limits the rotor speed
and the reactive power consumption after the fault, thus reducing the risk of instability.
.
The wind turbines can be equipped with a controllable source of reactive power [e.g. a
static condenser (STATCON) or static VAR compensator (SV C)] to deliver the
reactive power required to increase the speed at which the voltage is restored.
.
Mechanical and/or electrical parameters of the wind turbine and the generator can be
changed, but this often has the disadvantage of increased cost, reduced efficiency and
a more complicated mechanical construction.
These measures aim either at reducing the amount of overspeeding during the fault or at
supplying reactive power to accelerate voltage restoration after the fault. Although the
measures mitigate the problem, they do not completely solve it: it originates from the
working principle of an induction generator, which is not principally changed by the
above measures.
It should be noted that co nstant-speed wind turbines may become unstable at times
other than after a fault. The above sequence of events may also be initiated by a
relatively small drop in terminal voltage. This may be the result of a nearby synchronous
generator tripp ing or a highly inductive load switching in, for instance. When the wind
turbine delivers its nominal power and the terminal voltage drops slightly, rotor speed
will increase, because a larger slip is required to deliver nominal power at a terminal
voltage below nominal. This leads to an increase in the reactive power consumption,
which in turn results in a further decrease in terminal voltage. This can lead to a voltage
collapse that is not preceded by a short circuit. This is an example of voltage instability.
The response of a squirrel cage induction generator to changes in grid frequency is
similar to that of synchronous generators. The frequency of the stator field is identical to
the grid frequency divided by the number of pole pairs of the generator. If this frequency
changes, the mechanical rotor frequency changes as well. The change in energy stored in
the rotating mass, which is caused by the rotor speed change is either fed into the system
(in the case of a drop in grid frequency) or drawn from the system (in the case of an
increase in grid frequency).
634 Impacts on Power System Dynamics

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 635 – [629–652/24]
17.12.2004 10:51PM
However, there is an important difference in the responses of synchronous generators
in power plants and of squirrel cage induction generators that are used in constant-speed
wind turbines. In conventional power plants, a controllable prime mover is used. If there
is a frequency drop, the mechanical power app lied to the generator can be adjusted in
order to counteract this frequency drop. When the frequency increases, the prime mover
power is reduced, whereas when the frequency decreases, the prime mover power is
increased. In wind turbines, this is not possible because the wind cannot be controlled.
Thus, although constant-speed wind turbines tend to damp frequency deviations by
either releasing energy from or storing energy in the rotating mass, the effect is weaker
than in the case of synchronous generators in power plants. We would like to stress here
that the different responses are not due to the different generator types but to the fact
that in power plants the prime mover can be adjusted to counteract frequency changes.
This is normally not possible in wind turbines.
28.4.1.2 Variable-speed wind turbines
The dynamic behaviour of variable-speed wind turbines is fundamentally different from
that of constant-speed wind turbines. Variable-speed wind turbines use a power electro-
nic converter to decouple mechanical frequency and electrical grid frequency. This
decoupling takes place not only during normal operation but also during and after
disturbances.
Power electronic components are very sensitive to overcurrents because of their very
short thermal time constants, as mentioned in Chapter 25. When a drop in terminal
voltage occurs, the current through the semiconductors increases very quickly. The
controller of the power electronic converter samples many quantities, such as terminal
voltage, converter current, grid frequency and so on, at a high sampling frequency, in
the order of kilohertz. A fault is therefore noticed instantly by the power electronic
converter. The variable-speed wind turbine is then quickly disconnected in order to
prevent damage to the converter.
If a power system has a high penetration of wind power from variable-speed turbines,
this effect is naturally undesirable. If the variable-speed wind turbi nes are disconnected
at a relatively small voltage drop, a large amount of generation might be lost. Such a
situation may arise when a fault in the high-voltage transmission grid causes a voltage
drop in a large geographical region. This would lead to severe problems with the power
balance in the associated control area or even on the system level.
Therefore, grid companies with large amounts of wind power presently revise their
connection requirements for wind turbines, and are starting to require wind turbines to
remain connected to the grid during a fault (E.On Netz, 2001; see also Chapter 7). This
does not seem to be a major problem, though. The literature presents approaches where
the semiconductors are controlled in such a way that during voltage drops the current is
limited to the nominal value (Petterson, 2003; Saccomando, Svensson and Sannino,
2002). Presently, most variable-speed wind turbines are not equipped with current
controllers for a continued operation during voltage drops. However, if system interac-
tion were to require variable-speed wind turbines to have current controllers this would
not be a very complicated issue.
Wind Power in Power Systems 635

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 636 – [629–652/24]
17.12.2004 10:51PM
When the fault is cleared, variable-speed wind turbines must resume normal opera-
tion. In contrast to the case for directly grid-coupled generators, for variable-speed
turbines there are various degrees of freedom to switch them back to normal operation.
They are not governed by the intrinsic behaviour of the generator. It would be possible,
for instance, to generate extra reactive power when the voltage starts to increase again,
in order to accelerate voltage restoration.
Another question that must be answered is what to do with the energy that is stored in
the rotating mass because of the imbalance between mechanical power supplied and
electrical power generated during the fault. One possibility is to feed the energy into the
system. This would mean that shortly after the fault the constant-speed wind turbines
would generate more power than before the fault and more than would be possible given
the actual wind speed. After a while, the wind turbines would return to normal oper-
ation where generated power was in line with wind speed. The exact course of the
transition would depend on the design of the controllers. Another possibility would
be to let the turbine generate its prefault amount of power while using the pitch
controller to slow down the rotor. The tuning of the fault response of a variable-speed
wind turbine is similar to that of a high-voltage direct-curren t (HVDC) link, which is
described extensively in the literature (Kundur, 1994).
The decoupling of mechanical rotor frequency and electrical grid frequency in variable-
speed wind turbines also affects the response of variable-speed wind turbines to changes in
grid frequency. If the grid frequency changes because of a mismatch between generation
and load, the mechanical frequency of a variable-speed wind turbine does not change.
Thus, no energy is stored in or withdrawn from the rotating mass and drawn from or
supplied to the system, as would be the case with a constant-speed wind turbine.
Rather, the controllers of the power electronic converters compensate changes in grid
frequency, and the mechanical rotor frequency is not affected. It would be possible,
however, to equip a variable-speed wind turbine with additional controllers that change
the active power based on the measured value of the grid frequency. The response would
then be similar to the intrinsic behaviour of directly grid-coupled generators, within the
limits imposed by the actual value of the wind speed, though.
28.4.2 Dynamic behaviour of wind farms
Increasingly, wind turbines are being or will be grouped in wind farms, either onshore or
offshore. Gen eral reasons behind this are the desire to use good wind locations effect-
ively and to concentrate the visual impact of wind turbines to a limited area. Modern
wind turbines can reach a total height of 150 m if one of the blades is in a vertical
position. Wind farms tend to be located offshore because the turbulence intensity is
lower, wind speeds are higher, noise problems are less severe and the visual impact is
even further redu ced if the wind farm is locat ed far away from the coastline.
There is a number of wind farm configurations that are feasible (Bauer et al., 2000). All
possible configurations share certain characteristics regarding the interaction between the
wind farm and the grid, namely those that are inherently associated with using wind
turbines for power generation. Examples of such characteristics are fluctuating output
power and poor controllability and predictability of generated power. However, the
636 Impacts on Power System Dynamics

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 637 – [629–652/24]
17.12.2004 10:51PM
response of the wind farm to voltage and frequency disturbances strongly depends on the
wind farm’s configuration. Therefore, we will discuss the response to a terminal voltage
drop associated with a fault and to a frequency change separately for the various wind
farm configurations.
If conventional AC links and transformers are used for implementing both the
infrastructure within the wind farm and the grid connection, the response of the wind
farm to disturbances is determined by the wind turbines, because the connections
themselves are passive elements. In this case, the response to voltage and frequency
changes depends on the wind turbine type used. The main distinction here is between
constant-speed and variable-speed turbines, as discus sed in Section 28.4.1. If a DC link
is used to connect the wind farm to the grid, the wind turbines are electrically decoupled
from the analysed system. The response of the wind farm is governed by the technology
used for implementing the DC connection rather than by the wind turbine concept.
Thus, the differences between the various wind turbine types, pointed out in Section
28.4.1, become large ly irrelevant.
The DC connection can be of a current source type or of a voltage source type.
Conventional HVDC technology based on thyristors is a current source type of DC
connection (see also Chapters 7 and 22). Power electronic AC/DC converters based on
thyristors always have a lagging current and thus consume reactive power. Capacitors
can be installed to compensate for this reactive power. With this type of DC link,
additional technological components become necessary in order to control reactive
power, similar to the case of constant-speed wind turbines.
If there is a voltage drop caused by a fault in the power system the response of a
current source HVDC connection can be summarised as follows (Kundur, 1994). Dur-
ing a voltage drop, even in the case of only small dips, commutation failures are likely to
occur. That means that the current does not transfer from one semiconductor switch to
another. If the voltage stays below nominal, but increases sufficie ntly to clear the
commutation failure, the system may continue to operate at a lower DC voltage, thus
transferring less power. If the voltage stays low and commutation failures continue to
occur, the inverter is bypassed by shorting its input and blocking its out put. Once the
voltage is restored, the inverter is reconnect ed. The time of recovery is in the range of
100 ms to several seconds, de pending on the control strategy and the characteristics of
the grid to which the inverter is connected. It should be stressed that the disconnection
and reconnection of a HVDC link leads to transient phenomena in the wind farm and in
the power system to which it is connected.
In a voltage source type of DC connection, integrated gate bipolar transistor (IGBT)
or metal oxide semiconductor field effect transistor (MOSFET) switches are used. Suc h
technology is often referred to as HVDC Light
TM
or HVDC Plus, depending on the
manufacturer of the system.
(2)
The interaction of a voltage source HVDC connection
with the grid is similar to that of a variable-speed wind turbin e with a direct-drive
generator. The technology of both is essentially identical. This means that the con verter
sets the limits to the reactive power control. It is possible to limit the converter current
(2)
HVDC Light
1
is produced by ABB, HVDC Plus is produced by Siemens.
Wind Power in Power Systems 637

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 638 – [629–652/24]
17.12.2004 10:51PM
during faults to the nominal value in order to keep the converter grid connected. For
this, the semiconductors have to be controlled accordingly.
With respect to the factors that determine the response of a wind farm to frequency
changes, the conclusions that can be drawn are similar to those regarding individual
wind turbines, presented in Section 28.4.1. First, in case of a wind farm consisting
completely of passive AC components, the response to frequency changes is determined
by the turbines. The response of constant-speed and variable-speed wind turbines to
frequency changes was described in Section 28.4.1. If a DC link is used to connect the
wind farm to the grid, the wind turbines in the wind farm will not ‘notice’ changes in
grid frequency, because the HVDC connection decouples the internal frequency of the
wind farm and the grid frequency. It depends, therefore, on the control of the converter
at the grid side of this connection whether the wind farm responds to a change in grid
frequency by changing the amount of generated power or not.
28.4.3 Simulation results
In this section, simulations are used to provide a quantitative illustration of the quali-
tative analysis of the impact that wind power has on the transient behaviour and
stability of a power system. The widely known power system dynamics simulation
program PSS/E
TM
was used for these simulations.
(3)
The New England test system,
consisting of 39 buse s and 10 generators, was used as the test system to which wind
turbine models were connected (Pai, 1989). The reasons for using a test system, rather
than a model of a real power system, are:
.
Models of real power systems are not very well documented and the data are pa rtly
confidential. This tends to shift the focus from using the model to investigate certain
phenomena towards improving the model itself. In contrast, all parameters of test
systems are given in the literature, which makes them convenient to use.
.
Models of real power systems tend to be very big, which makes the development and
calculation of numerous scenarios cumbersome and time-consuming and complicates
the identification of general trends.
.
The results obtained with models of real systems are less generic than are those
obtained with general purpose test systems, and such test systems can be more easily
validated by and compared with the results of other investigations.
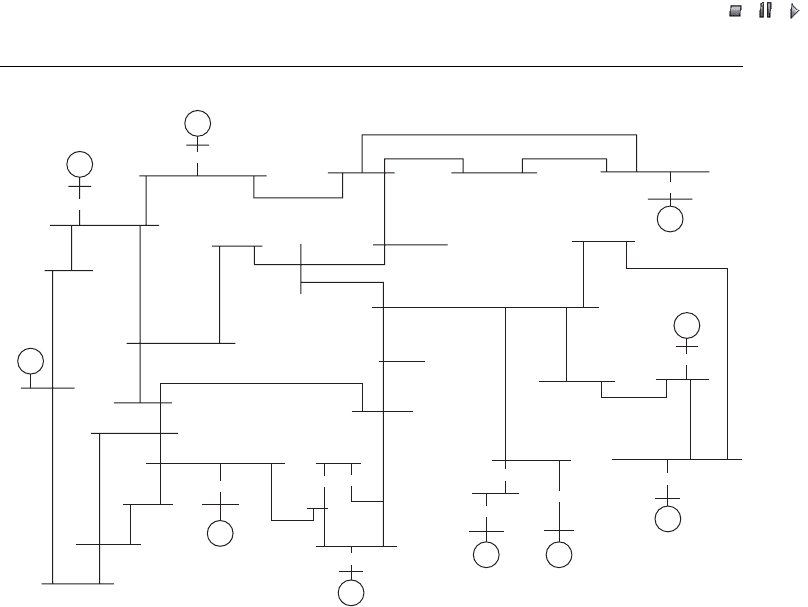
A one line diagram of the New England test system is depicted in Figure 28.2.
An aggregated model was used to rep resent the wind farms in order to avoid model-
ling each wind turbine individually and including the internal infrastructure of the wind
farm (Akhmatov and Knudsen, 2002; Slootweg et al., 2002; see also Chapter 29).
Further, both types of variable-speed wind turbine were represented with a single model,
a general variable-speed wind turbine model (Slootweg et al., 2003b). As their interaction
(3)
PSS/E
TM
(Power System Simulator for Engineers) is a registered trademark of Shaw Power Technologies
Inc. (PTI), New York.
638 Impacts on Power System Dynamics
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 639 – [629–652/24]
17.12.2004 10:51PM
with the power system is governed mainly by the controllers of the power electronic
converter, both types can be assumed to show very similar behaviour if the control
approaches are identical.
28.4.3.1 Response to a drop in terminal volt age
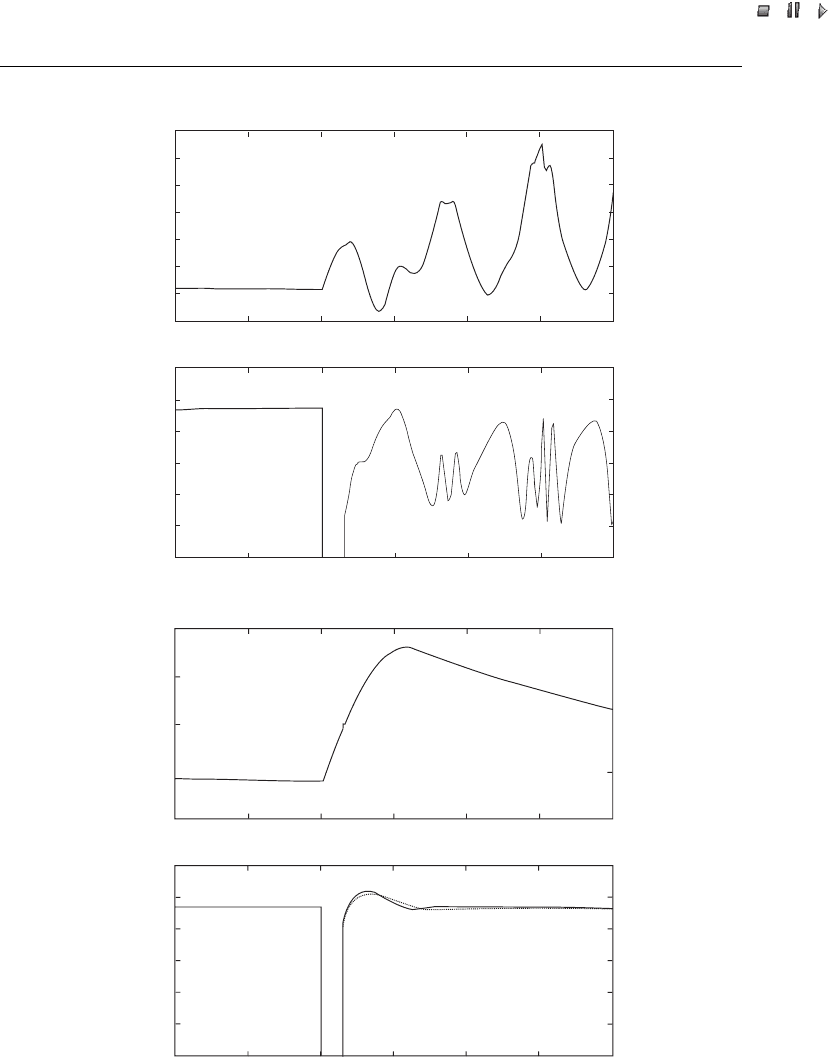
This sectio n looks at the mechanisms that lead to voltage and rotor speed instability.
First, the synchronous generator at bus 32 of the test system is replaced with a wind
farm with constant-speed wind turbines, and a 150 ms fault occurs at bus 11. Figures
28.3(a.i) and 28.3(a.ii) depict the rotor speed and the voltage at bus 32 of the constant-
speed wind turbines, respectively. Figure 28.3(a.ii) shows that the voltage does not
return to its predisturbance value. Instead, the voltage oscillates. The oscillation is
caused by the relatively soft shaft of the wind turbine. The shaft softness causes a large
angular displacement between the two shaft ends and a significant amount of energy is
stored in the shaft. When the fault occurs, this energy is released and rotor speed
increases quickly. Although the voltage is restored, the shaft causes the oscillation that
can be seen in Figure 28.3(a.ii)
Then, the synchronous generator at bus 32 is replaced with a wind farm with variable-
speed wind turbines, either with (dotted line) or without (solid line) terminal voltage or
reactive power control. The same fault is applied. Figures 28.3(b.i) and 28.3(b.ii) depict
the results. Figure 28.3(b.ii) show that the terminal voltage behaves more favourably for
10
1
21
22
23
24
26
27
28
29
2
3
4
5
6
7
8
9
10
1
2
3
45
6
7
8
9
30
31
32
33
34
35
36
37
38
39
11
12
13
14
15
16
17
18
19
20
25
w
w
w
w
w
w
w
w
w
w
w
w
Figure 28.2 The New England test system. Note: 1–39 ¼buses; 1–10 ¼generators
Wind Power in Power Systems 639
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 640 – [629–652/24]
17.12.2004 10:51PM
0.30
0.25
0.20
0.15
0.10
0.05
–0.05
0.00
2.50.0 0.5 1.0 1.5 2.0 3.0
2.50.0 0.5 1.0 1.5 2.0 3.0
1.2
1.0
0.8
0.6
0.4
0.2
0
Time (s)
Time (s)
Rotor speed (p.u.)Voltage (p.u.)
(a) Constant-speed
(ii)
(i)
0.99
0.98
0.97
0.96
0.95
0.0 0.5 1.0 1.5 2.0 2.5 3.0
1.2
1.0
0.8
0.6
0.4
0.2
0
0.0 0.5 1.0 1.5 2.0 3.02.5
Time (s)
Time (s)
Voltage (p.u.) Rotor speed (p.u.)
(b) Variable-speed
(ii)
(i)
Figure 28.3 (i) Rotor speed and (ii) voltage at bus 32 for (a) constant-speed wind turbines and
(b) variable-speed wind turbines after a 150 ms fault at bus 32 (see Figure 28.2). In part (b.ii), the
dotted and solid lines correspond to variable-speed wind turbines operating at unity power factor
or in terminal voltage control mode, respectively
640 Impacts on Power System Dynamics