Аракелян А.К., Афанасьев А.А. Вентильные электрические машины и регулируемый электропривод. Книга 2
Подождите немного. Документ загружается.


381
К j
T
a T T T T
a T T T T
эс
p
т экв экв p
т экв p p
1
1
2 2
2
2 3 3
2
, (12.56)
и подставив значения резонансных частот демпфированных
колебаний
pII
*
,
pIII
*
для заданных
T
и
T
экв
, получим рас-
четные
К
эс
(рис. 12.17, а).
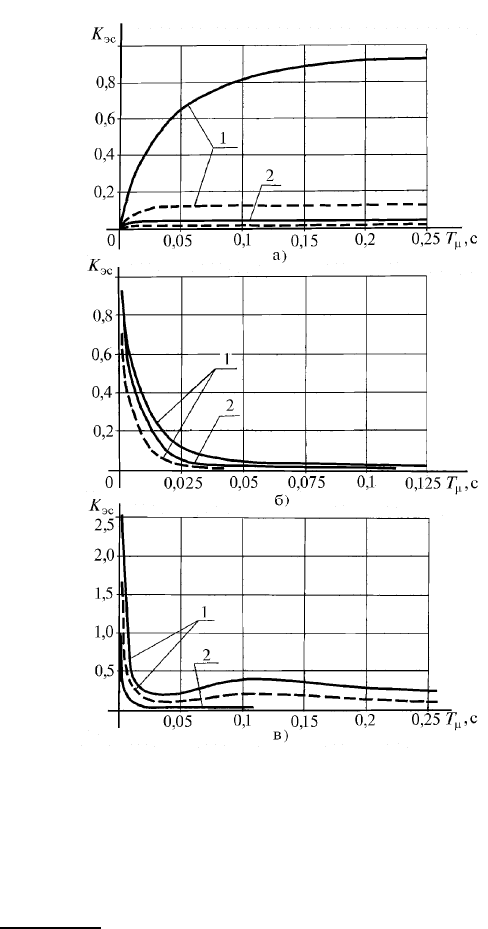
При малых частотах (рис. 12.17, а), т. е. в области возму-
щений, где в разомкнутой САР имеет место интенсивное
демпфирование колебаний электроприводом (табл. 12.3),
электромеханическая связь значительно ослабляется при
сравнительно малых значениях некомпенсированной посто-
янной
T
. При
T
0 01, с и при его увеличении демпфи-
рующая способность ВД возрастает. Это противоречит по-
лученному (рис. 12.16, в) результату, в САР с ИТ—СД опти-
мизация контура тока приводит к замене звена (якоря ВД) с
большой инерционностью интегрирующим звеном с еще
большей постоянной времени Для обеспечения оптимально-
го быстродействия по общепринятым критериям качества
переходных процессов при пуске САР с ВД необходима фор-
сировка напряжения якоря ВД, что достигается подбором
(расчетом) относительно меньшего значения некомпенсиро-
ванной постоянной.
Оценим электромеханическую связь САР ДЭМС с ВД с
оптимизированным контуром скорости, реализуемым с по-
мощью тахогенератора, установленного на стороне электро-
привода. Передаточная функция регулятора скорости для
однократно интегрирующей САР [338]
W p
К T К
К R a a T p
рc
от м ео
ос экв т с
, (12.57)
где
а
с
— коэффициент, характеризующий демпфирование
контура скорости.
382
Рис. 12.17. Коэффициент элеêтромеханичесêой связи (
К
эс
) в опти-
мизированной по быстродействию системе при регулировании тоêа
яêоря в фунêции малого параметра (
T
) (а); при статичесêом регу-
лировании сêорости двигателя в фунêции (
T
) (б); то же при аста-
тичесêом регулировании сêорости (в): 1 — T
экв
с; 0 1, 2 —
T
экв
с 0 175,
рII
*
; - - - - -
рIII
*
383
Пренебрегая внутренней связью ВД по ЭДС с членом
второго порядка оптимизированного замкнутого токового
контура, получим уравнение контура регулирования скоро-
сти:
К W p
E
К a T T T p
M p
оc рc
п
от т м экв
0
1 1
.
Преобразование этого уравнения по известному методу
дает выражение комплексного коэффициента электромеха-
нической связи. Выделив модуль
К
эс
, имеем:
К j
a a T T
a T T T
эс
c т м 01
2
т м экв 01
2
1 1
1 1
2 2
2
.
Расчетные кривые
К T
эс
(рис 12.17, б) показывают, что
при малых
T
существенно возрастает
К T
эс
по сравне-
нию с
К
эс
,
которое было получено с учетом значений, соиз-
меримых с
T
п
(рис. 12.16, а). Это свидетельствует о том, что,
как и для САР с ДПТ или АД [429], уровень статизма регу-
лировочных характеристик ВД играет существенную роль в
приобретении определенных демпфирующих свойств.
Рассмотрим двукратноинтегрирующую систему, т. е. аста-
тическую систему регулирования. Учтем и внутреннюю об-
ратную связь ВД по ЭДС вращения [338]
К p W p W p K T p
оc рc рт п п
1
1
1
1
E p p R T p
п экв экв0 1
1 . (12.58)
Решая (12.58) совместно с уравнением моментов из
(12.49), определим комплексный коэффициент
К j
эс
, мо-
дуль которого будет

384
К j
a a T T
a T a a T T T a a T
T T T
эс
c т м 01
2
т c т экв 01
2
c т 01
2
01
2
01
2
1
1 1 1 1
2 2 2 2 4
2
2 3
2
.
(12.59)
Расчетные кривые
К T
эс
(рис. 12.17, в) показывают,
что астатическая САР с ВД на базе типового СД также обла-
дает значительной электромеханической связью. Однако эта
связь несколько ниже, чем в аналогичной САР с ДПТ, из-за
сравнительно высокого значения эквивалентной электромаг-
нитной постоянной якорной цепи ВД.
Следовательно, если при синтезе САР с ВД для ДЭМС с
большой податливостью механического звена целесообразно
статическое регулирование скорости или токоограничиваю-
щей характеристики с невысокой степенью точности, то в
ДЭМС со слабодемпфирующим механическим звеном жела-
тельно астатическое регулирование скорости или момента.
В первом случае условия для демпфирования упругих ме-
ханических колебаний электрической частью и возникшие
колебания электропривода от управляющих воздействий бла-
гоприятны. Поэтому специальные меры по обеспечению
демпфирования сводятся к оптимизации регуляторов [501].
При относительно малых
T
(меньших 0,01 с) возникают ус-
ловия, характерные для САР с жесткой электромеханической
связью, в которой демпфирование ослаблено вследствие
чрезмерно жестких механических характеристик ВД. Меха-
нические колебания в этом случае не вызывают изменений
скорости электропривода и отвода энергии колебаний в
якорную цепь [429]. Поэтому следует параметры регуляторов
подбирать такими, чтобы сумма некомпенсированных посто-
янных САР была не меньше 0,01 с.
Выводы
1. Многомассовые электромеханические САР с ВД на ба-
зе типовых СД в линейном приближении обладают большим
диапазоном возможных значений коэффициента электроме-
385
ханической связи, в каждом конкретном случае этот коэф-
фициент может быть рассчитан.
2. Область слабого демпфирования, как правило, охваты-
вает верхний диапазон регулирования, включая и критиче-
скую скорость приводного двигателя. Поэтому САР МЭМС с
ВД по быстродействию может быть оптимизирована на ос-
нове приведенного жесткого (одномассового) механического
звена (т. е.
С
экв12
) известными методами.
3. Область существенной электромеханической связи в
этих САР охватывает область низкочастотного главного ко-
лебания. Поэтому передаточные функции регуляторов при
последовательной либо параллельной коррекции и место ус-
тановки тахогенератора рассчитаны и могут быть выбраны,
например, по [429, 501, 532].
Приложение 12.5
Синхронный турбодвигатель СТД 4000 кВт ;
n
c
3000об мин ;
GD
2
278 кг м
2
;
d
в
0 15, м,
l
в
2 56, м.
Питательный насос
ПÝÍ
3200 кВт,
GD
2
21 0 , кг м
2
(при
рециркуляции),
GD
2
54 0 , кг м
2
(при подаче),
d
b
011, м,
l
b
1 6, м. Тахогенератор ТГ—180П,
GD
2 3
1 2 10
, кг м
2
,
зубчатая соединительная муфта —
GD
2
1 0 , кг м
2
,
C
12
5
0318 10 ,
H
м
,
C C
23 34
6
5 288 10 ,
H
м
,
01
2513 1 , с ,
02
3211 с (без жидкости),
02
610 1 с (с
жидкостью),
a
J
J
T T T
1
2
1
п м экв
;
a
J
J
T T T
2
2
1
экв п м
;
a J J J T T T J J T T K T
3 1 2 01
2
2
1
-1
п м экв 1
-1
п м от экв
;
a J J J T T T
4 1 2 01
2
1
-1
м п экв
;
a J J J T T
5 1 2
1
01
2
п экв
; а
0
01
2
;
386
b J J T M M
1 2
1
-1
м c
**
;
b J J M
2 2
1
-1
c
*
;
b J J J T M T M
3 1 2
1
-1
м п c
**
;
b M
0 01
2
c
*
;
c J J T T T M
1 2 01
2
1
-1
п м экв c
*
;
c J J T T T M
2 2 01
2
1
-1
м п экв c
*
;
c J J T M T K M
3 2 01
2
1
1
-1
м м от c
**
;
c M
0 01
2
c
*
;
M K U K R M
*
мо вх у экв
1
;
M S
0
1*
;
S
3
14 5 10
3
,
H
м
;
K K P K L I
ad
f
мо ео сх
2
0
;
K K K R
от от у экв
;
T L R
экв экв экв
-1
;
L L L
экв д я
;
L L L L L
d q d q
я
1
2
3 3 2
1
cos
;
R r r L L L
d d q
экв д
2
3
2
;
T J R K
м экв мо
-2
;
M MM
*
1
;
M M tg
0
2 6 2
sin ;
L
д
*
3 0, ;
L L
ad aq
*
,
*
1 7636 ;
L
*
01178, ;
L L
d q
* *
1 8814, ;
r
д
*
0 0001, ;
L L
d q
* *
01698, ;
r
*
0 0069, ;
K
сх
3 2
1
;
1
30 60 , эл. град; 10 15, эл. град; 30 0, эл. град;
E U
п фи0
1 2
6000 3
В;
0
314 рад/с;
p
1 (число пар полюсов СТД)
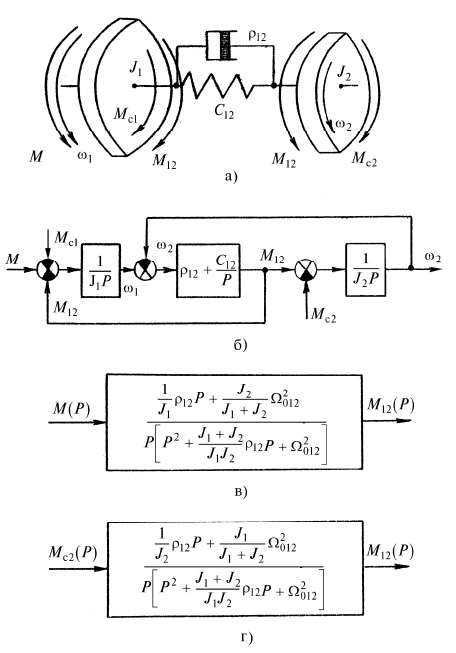
12.6. Оптимизация динамических нагрузок механического
звена электропривода с вентильным двигателем
При синтезе САР электроприводов с ВД возникает задача
о наиболее опасном законе изменения нагрузок и усилий в
механическом звене электропривода с учетом добавочных
колебательных электромагнитных моментов (см. п. 11.3). Ис-
пользуя вариационный метод [354, 469, 550] при заданных
функциях (переменных) механического звена электроприво-
да
M t
12
,
1
t
,
2
t
(рис. 12.18, а)
3
Базовыми являются общепринятые номинальные параметры СД.
387
Рис. 12.18. Расчетная (а) и струêтурные (б—г) схемы двухмассовой
механичесêой системы
и при возмущающих воздействиях
M t
,
M t
c
1
,
M t
c
2
,
при
которых
M t
12
принимает максимальное (минимальное)
значение, получим решение уравнения Эйлера [563].
Далее,
воспользовавшись неопределенными множителями Лагранжа
388
и с учетом налагаемых ограничений, минимизируем уравне-
ние Эйлера [469].
Ниже при анализе нагрузок в механическом звене элек-
тропривода предположим, что средний электромагнитный
момент двигателя и его скорость являются независимыми
функциями времени и поддерживаются на заданном уровне
системой регулирования электроприводом. Это допущение
позволяет исключить демпфирующее влияние электродвига-
теля [429], т. е. не учитывать взаимосвязь механических и
электромагнитных процессов в электромеханической системе
привода.
Такая модель двухмассовой системы при попеременном
защемлении одного конца вала и возмущении на другом
конце позволит определить сравнительно просто ориентиро-
вочную (иногда достаточно близкую с истиной) динамиче-
скую нагрузку в гибкой части соединения валов (рис. 12.18,
б).
Так как отклонения режима движения электропривода
механизма от установившегося принимаем малыми, то, раз-
ложив уравнения движения электромеханической системы в
ряд и отбросив члены высшего порядка малости, уравнения
возмущенного движения запишем в виде:
M M J p
M M J p
c
12 12 1 2 1 1
12 12 1 2 2 2
;
,
(12.60)
а задачу определения наиболее опасного динамического воз-
действия в механическом звене сводим, согласно правилу
множителей Лагранжа, к задаче о минимуме промежуточного
линейного функционала, для которого необходимым услови-
ем экстремума является решение двух уравнений Эйлера
[469].
В системе (12.60)
M
— приращение электромагнитного
момента приводного электродвигателя, Н. м;
M C
12 12 12
— приращение момента на концах упругого валопривода
элемента (муфта);
C J Gl
p
12
1
— коэффициент жесткости
для муфты при скручивании, Нм;
l
— длина упругой части
389
муфты валопривода, м;
J D
p
4 1
32 — момент инерции
поперечного сечения упругой части вала, м
4
;
G
— модуль
упругости кручения вала, Па;
12 1 2
— угловая
деформация упругого элемента валопривода муфты;
1 2
,
— приращения скоростей концов валов двигателя и меха-
низма, соответственно, рад/с;
12
V
— коэффициент вяз-
кого трения упругого элемента вала, Н
.
м
.
с/рад; — динами-
ческая вязкость, коэффициент внутреннего трения, Н
.
с/м
2
;
V
—
объем, м
3
;
J J
1 2
, — моменты инерции соответственно
электродвигателя и приведенного механизма, Н
.
м
.
с
2
;
M
c c
— приращение момента сопротивления меха-
низма (в общем, случае
—1, 0, 1, 2;
c
— жесткость ста-
тической характеристики механизма). Из (12.60) находится
уравнение, записанное относительно угловой деформации
упругого элемента
12
:
p p
J
M
J
M
c
2
012
2
12
1
2
2
1 1
, (12.61)
где
12
1 2
1 2
1
J J
J J C
, — коэффициент демпфирования упру-
гой муфты;
012
12 1 2
1 2
01
2
02
2
C J J
J J
— собственная угловая
частота свободных колебаний двухмассовой системы ва-
лов;
01
12 1
1
C J
— угловая частота свободных колебаний
маховой массы ротора (якоря) двигателя;
'
02
12 2
1
C J
— угловая частота свободных колебаний
маховой массы рабочей машины.
Возмущающим моментом в (12.61) может являться либо
M
, либо
M
c
, вызывающий максимальное отклонение уп-
ругого момента при защемлении одного из валов. По-

390
этому приведем формулу (12.61), например, к виду (см.
рис.12.18 в, г):
p p M M
c
2
012
2
12 02
2
2 . (12.62)
Относительно внешнего возмущающего момента в (12.62)
M
c
делаем допущение, заключающееся в ограничении по
модулю
M M
c
c макс
, (12.63)
поскольку за исключением особых случаев (аварийных), воз-
мущения со стороны двигателя представляются относительно
медленно меняющимися временными функциями, кроме до-
бавочных электромагнитных моментов, связанных с комму-
тационным процессом в инверторе тока.
Ищем наиболее опасное для соединительной муфты зна-
чение
M
12
, подчиненное ограничению (12.63), воздействие
M t
с
, при котором деформация муфты и, следовательно,
момент нагрузки на валу двигателя от упругой деформации
M t
12
в некоторый момент
t
T
достигают наибольшего
значения по сравнению с деформациями, вызываемыми лю-
быми другими воздействиями механизма или двигателя, под-
чиненными этому же ограничению.
Ограничение по (12.63) можно рассмотреть как предел
ограничений
M t
M
dt T
с
T
c макс
0
или
M t
M
dt T
T
макс
0
(12.64)
при некотором вещественном корне уравнения Эйлера для
функции
M t
с
или
M t ,
m
, а требование максиму-
ма момента в упругом звене (или упругой деформации муф-
ты)
M t
12
в момент
t
T
трактовать как требование дости-
жения максимума интеграла [469],