Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.


damping, (iii) material or solid or hysteretic damping, and (iv) fluid damping.
In all these cases, the damping force is expressed as a function of velocity.
2.4.1 Viscous Damping
When a viscous fluid flows through a slot or around a piston in a cylinder, the
damping force generated is proportional to the relative velocity between the
two boundaries confining the fluid. A common representation of a viscous
damper is a cylinder with a piston head, as shown in Figure 2.20. In this case,
the piston head moves with a speed relative to the cylinder housing, which is
fixed. The damper force magnitude F always acts in a direction opposite to that
of velocity. Depending on the damper construction and the velocity range, the
magnitude of the damper force is a nonlinear function of velocity or can
be approximated as a linear function of velocity. In the linear case, the rela-
tionship is expressed as
(2.46)
where the constant of proportionality denoted by c is called the damping co-
efficient. The damping coefficient c has units of N/(m/s). Viscous damping of
the form given by Eq. (2.46) is also called slow-fluid damping.
In the case of a nonlinear viscous damper described by a function ,
the equivalent linear viscous damping around an operating speed is de-
termined as follows:
(2.47)
Linear viscous damping elements can be combined in the same way that lin-
ear springs are, except that the forces are proportional to velocity instead of
displacement.
Energy Dissipation
The energy dissipated by a linear viscous damper is given by
(2.48)
Parallel-Plate Damper
An example of a viscous damper is shown in Figure 2.21, which is used to il-
lustrate how the damping coefficient c depends on fluid viscosity denoted
by m. The system consists of two parallel plates with a viscous fluid layer of
height h confined between them. The top plate, which moves with a speed
relative to the lower plate, has a surface area A. For the damper construction
shown in Figure 2.21, and assuming that the fluid behaves like a Newtonian
fluid, the shear force acting on the bottom plate is written as
(2.49)
Shear stress acting
on top plate
F1x
#
2 a
mx
#
h
b A
mA
h
x
#
x
#
E
d
Fdx
Fx
#
dt
cx
#
2
dt c
x
#
2
dt
c
e
dF1x
#
2
dx
#
`
x
#
x
#
l
x
#
x
#
l
F1x
#
2
F1x
#
2 cx
#
F1x
#
2
x
#
50 CHAPTER 2 Modeling of Vibratory Systems
c
c
F
x
.
m
m
FIGURE 2.20
Representation of a viscous damper.
⎫
⎬
⎭
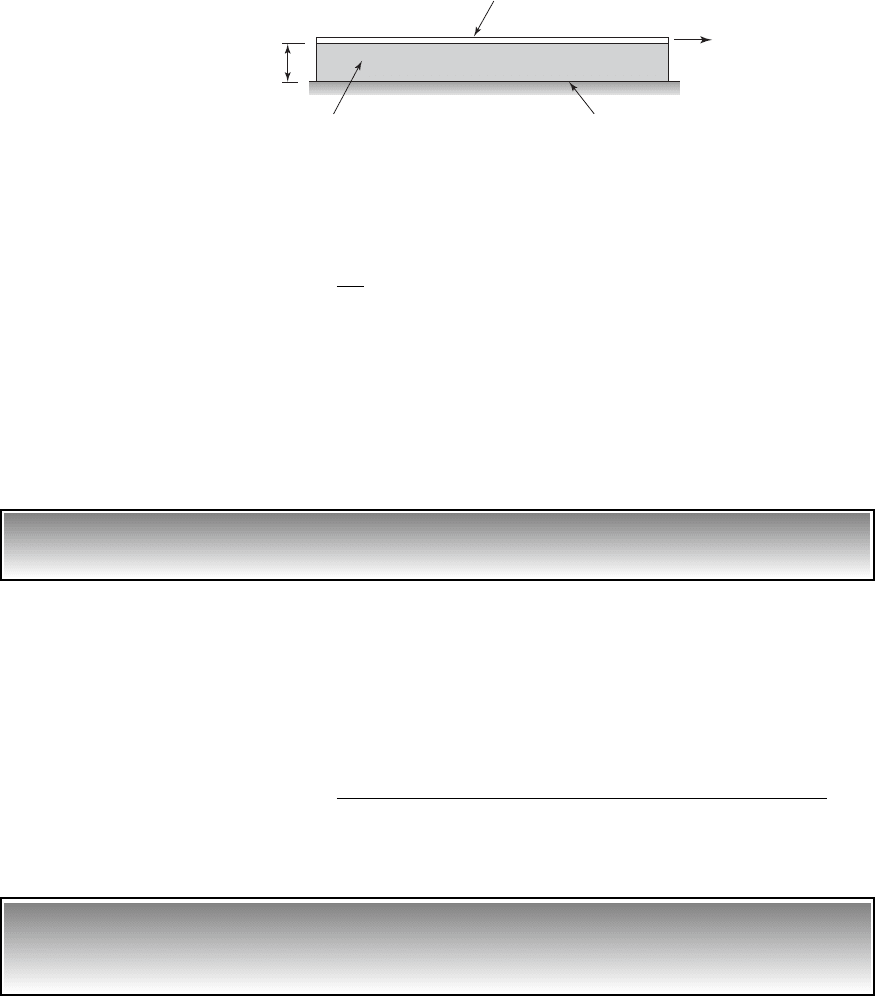
Equation (2.49) has the same form as Eq. (2.46), where the damping co-
efficient c for the parallel-plate construction of Figure 2.21 is given by
(2.50)
From Eq. (2.50), it is clear that the damping coefficient is linearly proportional
to fluid viscosity m, linearly proportional to the surface area A of the top plate,
and inversely proportional to the separation h between the two plates. Thus, as
the area A is increased and/or the separation h is decreased, the damping coef-
ficient is increased. However, there are limits to the area A and the separation h
that one can realize. Hence, alternate damper designs are often used.
EXAMPLE 2.10
Design of a parallel-plate damper
A parallel-plate damper with a top plate of dimensions 100 mm 100 mm is
to be pulled across an oil layer of thickness 0.2 mm, which is confined be-
tween the moving plate and a fixed plate. We are given that this oil is
SAE 30 oil, which has a viscosity of 345 mPa s (345 10
3
Ns/m
2
).
We shall determine the viscous damping coefficient of this system. To
this end, we make use of Eq. (2.50) and substitute the given values into this
expression and find that
EXAMPLE 2.11
Equivalent damping coefficient and equivalent stiffness
of a vibratory system
Consider the vibratory system shown in Figure 2.22a in which the motion of
mass m is restrained by a set of linear springs and linear viscous dampers. A
free-body diagram of this system is shown in Figure 2.22b. In determining the
spring force generated by the springs k
2
and k
3
, we have made use of the fact
these springs are in series and used Eq. (2.18).
17.25 N
#
s/m
c
1345 10
3
N/m
2
#
s2 1100 10
3
m 100 10
3
m2
0.2 10
3
m
##
c
mA
h
2.4 Dissipation Elements 51
FIGURE 2.21
Parallel-plate viscous damper
construction.
h
x
.
Top plate of surface area A
Bottom plateViscous fluid
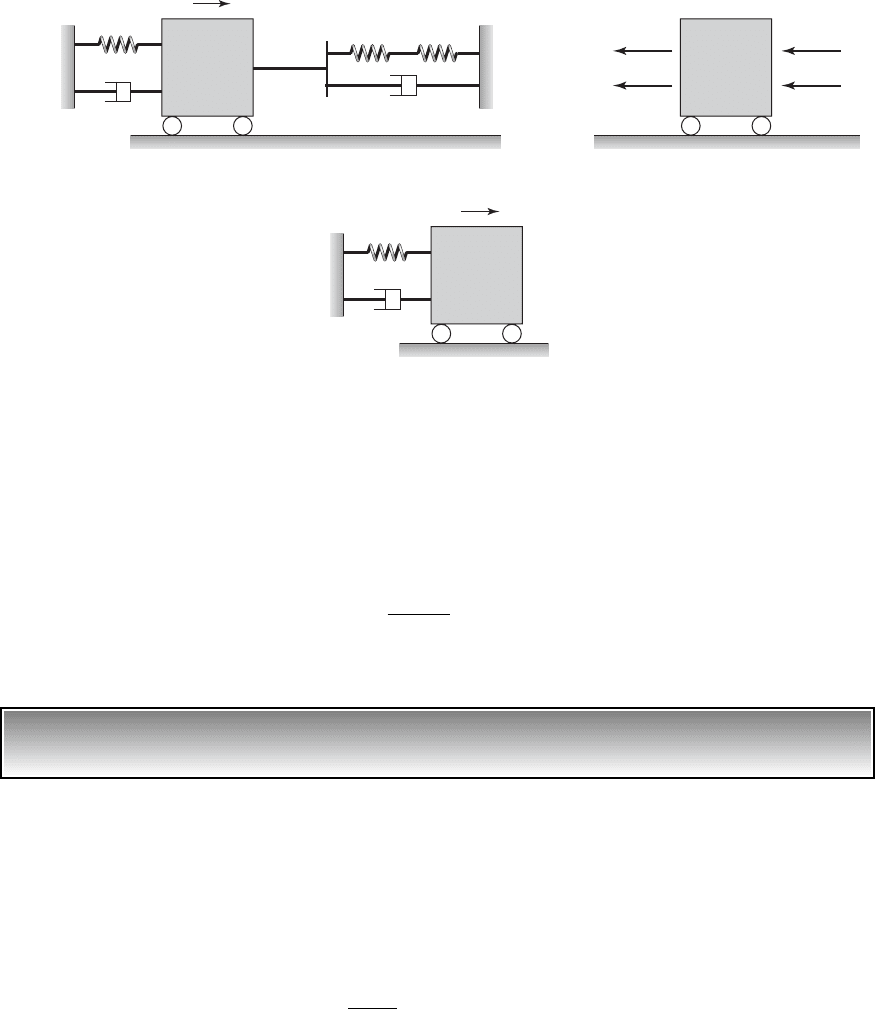
In Figure 2.22c, the springs and dampers shown in Figure 2.22a have
been collected and expressed as an equivalent spring and equivalent damper
combination. Thus, we have
EXAMPLE 2.12
Equivalent linear damping coefficient of a nonlinear damper
It has been experimentally determined that the damper force-velocity rela-
tionship is given by the function
(a)
We shall determine the equivalent linear damping coefficient around an oper-
ating speed of 3 m/s. To determine this damping coefficient, we use Eq. (2.47)
and Eq. (a) and arrive at
(b) 12.1 N
#
s/m
4 N
#
s/m 10.9 N
#
s
3
/m
3
2 13
2
m
2
/s
2
2
c
e
dF1x
#
2
x
#
`
x
#
3 m/s
4 N
#
s/m 10.9 N
#
s
3
/m
3
2x
#
2
0
x
#
3 m/s
F1x
#
2 14 N
#
s/m 2x
#
10.3 N
#
s
3
/m 2x
#
3
c
e
c
1
c
2
k
e
k
1
k
2
k
3
k
2
k
3
52 CHAPTER 2 Modeling of Vibratory Systems
k
1
k
2
k
3
c
1
c
2
(a) (b)
(c)
x
m m
k
e
k
1
xk
2
k
3
/(k
2
k
3
)
x
c
e
x
c
1
x
.
c
2
x
.
m
FIGURE 2.22
(a) Linear vibratory system; (b) free-body diagram of mass m; and (c) equivalent system.
2.4.2 Other Forms of Dissipation
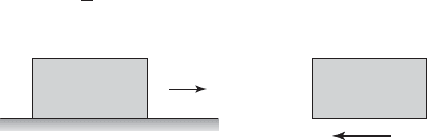
Coulomb Damping or Dry Friction
This type of damping is due to the force caused by friction between two solid
surfaces. The force acting on the system must oppose the motion; therefore,
the sign of this force must have the opposite sense (direction) of velocity as
shown in Figure 2.23. If the kinetic coefficient of friction is m and the force
compressing the surfaces is N, then
(2.51)
where sgn is the signum function, which takes on the value of 1 for positive
values of the argument ( in this case), 1 for negative values of the argu-
ment, and 0 when the argument is zero. If the normal force is due to the sys-
tem weight, then N mg and we have
(2.52)
The energy dissipated in this case is given by
(2.53)
Although dry friction can result in loss of efficiency of internal combus-
tion engines, wear on contacting parts, and the loss of position accuracy in
servomechanisms, it has been used to enhance the performance of turboma-
chinery blades, certain built-up structures, and earthquake isolation.
10
Fluid Damping
This type of damping is associated with a system whose mass is vibrating in
a fluid medium. It is often referred to as velocity-squared damping.
11
This
force always acts in a direction opposite to that of the velocity of the mass.
The magnitude of the damping force is given by
(2.54)
where
(2.55)c
d
1
2
CrA
F1x
#
2 c
d
x
#
2
sgn1x
#
2 c
d
0x
#
0x
#
mmg
sgn1x
#
2x
#
dt
E
d
Fdx
Fx
#
dt
F1x
#
2 mmgsgn1x
#
2
x
#
F1x
#
2 mNsgn1x
#
2
2.4 Dissipation Elements 53
10
A. A. Ferri, “Friction Damping and Isolation Systems,” ASME J. Vibrations Acoustics, Special
50th Anniversary Design Issue, Vol. 117, pp. 196–206 (June 1995).
11
This type of damping is also referred to as turbulent-water damping; see J. P. Hartog, ibid.
x
.
.
F(x)
m
m
FIGURE 2.23
Dry friction.

and C is a drag coefficient, A is the projected area of the mass in a direction
normal to , and r is the mass density of the fluid. In Example 6.6, the fluid-
damping model is used to study a car seat.
The energy dissipated is
(2.56)
Fluid damping of the form given by Eq. (2.54) is often referred to as fast-fluid
damping.
Structural or Solid or Hysteretic Damping
This type of damping describes the losses in materials due to internal friction.
The damping force is a function of displacement and velocity and is of the form
(2.57)
where b
h
is an empirically determined constant. The energy dissipated is
(2.58)
From the discussions of Sections 2.4.1 and 2.4.2, it is clear that the damp-
ing force is linearly proportional to velocity for linear viscous damping, and
the damping force is a nonlinear function of velocity for nonlinear viscous
damping, Coulomb damping, and fluid damping. The structural damping
model is used only in the presence of harmonic excitation, as discussed fur-
ther in Section 5.8. Although damping models were presented only for trans-
lational motions, they are equally valid for rotational motions.
2.5 MODEL CONSTRUCTION
2.5.1 Introduction
In this section, four examples are provided to illustrate how the previously de-
scribed inertia, stiffness, and damping elements are used to construct system
models. Modeling is an art, and often experience serves as a guide in model
construction. In this section, the examples are drawn from different areas, and
are presented in a progressive order proceeding from the use of discrete iner-
tia, stiffness, and damping elements in a model to distributed elements, and
finally, to a combination of distributed and discrete elements.
As discussed in the subsequent chapters, the mass, stiffness, and damping
of a system appear as parameters in the governing equations of the system.
kpb
h
sgn1x
#
20x 0x
#
dt
E
d
Fdx
Fx
#
dt
F kpb
h
sgn1x
#
20x 0
c
d
sgn1x
#
2x
#
3
dt
E
d
Fdx
Fx
#
dt
x
#
54 CHAPTER 2 Modeling of Vibratory Systems
When only discrete elements are used to model a physical system, the associ-
ated system of governing equations is referred to as a discrete system or a
lumped-parameter system. In these cases, as will become evident in later chap-
ters, since a finite number of independent displacement or rotation coordinates
suffice to describe the position of a physical system, discrete systems are also
referred to as finite degree-of-freedom systems. When a distributed element is
used to model a physical system, the associated system of governing equations
is referred to as a distributed-parameter system or a continuous system. In this
case, one or more displacement functions are needed to describe the position of
a physical system. Since a function is equivalent, in a sense, to specifying the
displacement at every point of the physical system or the displacements at an
infinite number of points, distributed-parameter systems are also referred to as
infinite degree-of-freedom systems.
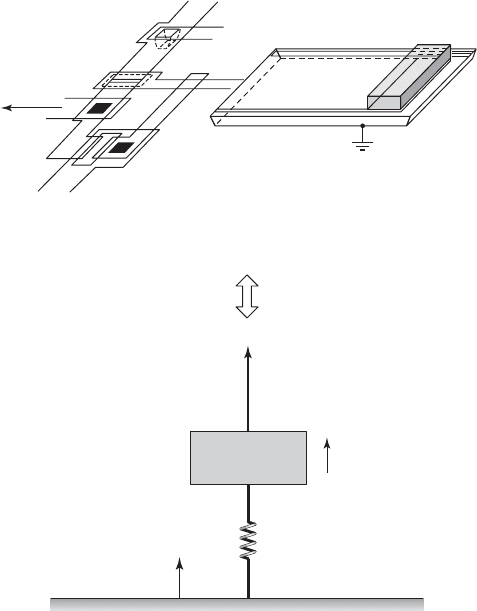
2.5.2 A Microelectromechanical System
In Figure 2.24, a microelectromechanical accelerometer
12
is shown along with
the vibratory model of this sensor. In this sensor, the dimensions of the can-
tilevered structure are of the order of micrometers and the weight of the end
mass is of the order of micrograms. A coating on top of the structure serves as
one of the faces of a capacitor and another layer below the structure serves as
another face of the capacitor. The gap between the capacitor faces changes in
response to the accelerations experienced by the sensor, and the change in volt-
age across this capacitor is sensed to determine the acceleration.
In constructing the vibratory model, the inertia of the cantilevered struc-
ture is ignored and this structure is represented by an equivalent spring with
stiffness k. The mass of the cantilevered structure is assumed to be negligible
and the end mass is modeled as a point mass of mass m. Consequently, the mo-
tion of this inertial element is described by a single generalized coordinate x,
and the model is an example of a single degree-of-freedom system. The elec-
trostatic force due to the capacitor acts directly on the mass, while the acceler-
ation to be measured acts at the base of the vibratory model. The electrostatic
force that acts directly on the inertial element is an example of a direct excita-
tion, while the acceleration acting at the base is an example of a base excita-
tion. In a refined model of the system, the mass of the cantilevered structure
can also be lumped together with that of the end mass to obtain an effective
point mass. No damping elements are used in constructing the vibratory model
because the physical system has “very low” damping levels.
Single degree-of-freedom systems are treated at length in Chapters 3
to 6. In particular, the response of a single degree-of-freedom system subjected
to a base excitation or direct excitation such as that shown in Figure 2.24 is dis-
cussed in Section 5.5.
y
$
2.5 Model Construction 55
12
K. E. Petersen, A. Shartel, and N. F. Raley, “Micromechanical accelerometer integrated with
MOS detection circuitry,” IEEE Transactions of Electronic Devices, Vol. ED-29, No. 1,
pp. 23–27 (1982).
56 CHAPTER 2 Modeling of Vibratory Systems
x
End mass m
Electrostatic
force F
e
Output
Ground
Fixed end Free end
End mass m
Physical system
Equivalent structure
stiffness k
Single-degree-of-freedom system
Base acceleration y
..
FIGURE 2.24
Microelectromechanical accelerom-
eter and a vibratory model of this
sensor. Source: From Systems Dy-
namics and Control 1st edition by
Umez-Eronini. © 1999. Reprinted
with permission of Nelson, a divi-
sion of Thomson Learning:
www.thomsonrights.com.
Fax 800 730-2215.
2.5.3
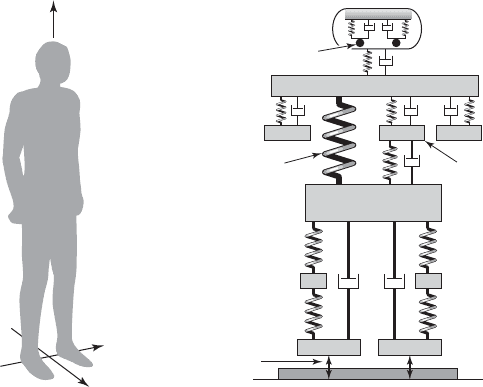
The Human Body
In Figure 2.25, the human body and a vibratory model used to study the re-
sponse of this physical system when subjected to vertical excitations are
shown. While the vibratory model used in the previous section has only one
discrete inertia element and one discrete spring element, the model
13
shown
in Figure 2.25 has many inertial, spring, and damper elements.
Since many independent displacement variables are needed to describe
the motion of this physical system, this vibratory model is an example of a
system with multiple degrees of freedom. The response of systems with mul-
tiple degrees of freedom is treated in Chapters 7 and 8.
The human body is highly sensitive to vibration levels. While the body
may sense displacements with amplitudes in the range of a hundredth of a
mm, some of the components of the ear can sense even smaller displace-
ments. In the low-frequency range from 1 Hz to 10 Hz, the perception of mo-
tion is said to be proportional to acceleration, and in the mid-frequency range
13
M. P. Norton, Fundamentals of Noise and Vibration Analysis for Engineers, Cambridge
University Press, New York (1989).
from 10 Hz to 100 Hz, the perception of motion is said to be proportional to
velocity. In addition, the level of stimulation also needs to be considered. The
response of different parts of a human body is also dependent upon the fre-
quency content of the excitation. For example, the thorax-abdomen system is
highly responsive to vibrations in the range of 3 Hz to 6 Hz, the head-neck
shoulder system to vibrations in the range of 20 Hz to 30 Hz, and the eyeball
to vibrations in the range of 60 Hz to 90 Hz. In terms of modeling, the detailed
model shown in Figure 2.25 can be further simplified based on the frequency
content of the excitation. If, for example, the excitation has no frequency con-
tent below 20 Hz, then it is not necessary to have a detailed spring-mass-
damper model for the thorax-abdomen system.
In biomechanics and biomedical engineering, there is an area called
whole-body vibration where one is concerned with the response of a human
body to different types of vibratory excitations and medical aspects of occu-
pational exposure to these excitations. There are detailed international
standards
14
that provide acceptable vibration levels in terms of acceleration
magnitudes for horizontal and vertical vibrations based on exposure times
and frequency content. In another area, called hand-arm vibration, one is
2.5 Model Construction 57
Feet
Legs
Thorax-abdomen
Arms and shoulders
Spinal column
(stiff elasticity)
Eyeballs
z
x
y
Head
Applied force
Vibrating platform
Upper torso
Hips
FIGURE 2.25
Human body and a vibratory model. Source: From M.P.Norton, Fundamentals of Noise and
Vibration Analysis for Engineers, Cambridge University Press, New York (1989). Copyright ©
1989 Cambridge University Press. Reprinted with the permission of Cambridge University
Press.
14
ISO 2631/1, “Evaluation of human exposure to whole-body vibration: General requirements,”
ISO 2631, Part 1, International Standards Organization, Geneva, Switzerland (1985) and ISO
2631/2, “Evaluation of human exposure to whole-body vibration: Continuous and shock-
induced vibration in buildings (1 to 80 Hz),” ISO 2631, Part 2, International Standards Organi-
zation, Geneva, Switzerland (1985).
concerned with the response of the hand-arm system to vibratory excitations
and medical aspects of occupational exposure to such excitations. These are
also covered by international standards.
15
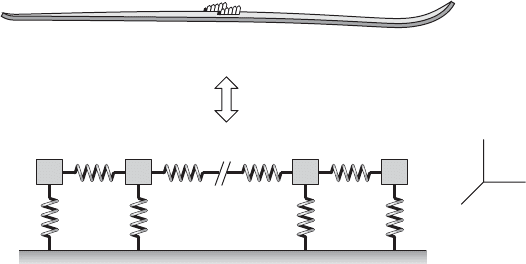
2.5.4 A Ski
A cross-country ski is shown in Figure 2.26. The corresponding vibratory
model is usually a system with an infinite number of degrees of freedom. In
the model shown here, the ski is modeled as a collection of discrete inertial
elements. In order to take into account that each end or boundary of the ski is
free, the inertial elements at the boundaries are only constrained by a spring
element on one side in the X-direction. Furthermore, each of these inertial
elements is allowed two translational degrees of freedom, one along the
X-direction and another along the Y-direction. If these elements are consid-
ered as point masses only, then they do not have any rotational degrees of
freedom. However, if the inertial elements are treated as rigid bodies, then ro-
tational degrees of freedom about the axis oriented along the Z-direction also
need to be taken into account.
In the limit, as the ski is broken up into a collection of infinitesimal seg-
ments, where each segment is modeled as either a point mass or a rigid body,
one ends up with a vibratory model with an infinite number of degrees of
freedom. The process of discretizing a spatially distributed system into a col-
lection of inertial elements can be realized through various means. This as-
pect is not addressed in detail in this book; however, if the model of the ski is
a beam, then the results of Chapter 9 may be applicable.
58 CHAPTER 2 Modeling of Vibratory Systems
15
ISO 5349/1, “Measurement and evaluation of human exposure to hand-transmitted vibration:
General requirements,” ISO 5349, Part 1, International Standards Organization, Geneva, Switzer-
land (1999) and ISO 5349/2, “Measurement and evaluation of human exposure to hand-
transmitted vibration: Practical guidance for measurement at the workplace,” ISO 5349, Part 2,
International Standards Organization, Geneva, Switzerland (2001).
Vibratory model
Y
X
Z
Physical system
FIGURE 2.26
Cross-country ski, which is a physical system with distributed stiffness and
inertia properties, and its vibratory model.
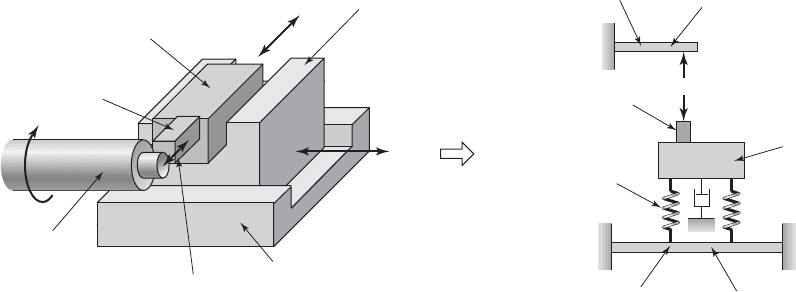
2.5.5 Cutting Process
Consider the cutting process model
16
shown in Figure 2.27. The physical sys-
tem consists of different components of the turret, lathe bed, and the tool used
for cutting the work piece. Unlike the previous vibratory models, a more com-
plex model is constructed. While previously only lumped masses or discrete
inertia elements were used, here, a distributed inertia element, a beam, is also
used in the model.
In the vibratory model, the bed is modeled as an elastic beam with a
length L
b
, mass per unit length m
b
, area moment of inertia I
b
about the bend-
ing axis, and Young’s modulus of elasticity E
b
. The turret is modeled as rigid
body with a rotational degree of freedom u and a translational degree of free-
dom along the vertical direction. The mass moment of inertia of the turret is
represented by J
u
and the mass of the turret and the tool together is repre-
sented by M
m
. Spring elements are introduced between the turret and the bed,
and a damper element is introduced to model damping in the turret. A
viscous-damping element c is used to model the damping experienced by the
turret and the damping experienced in the tool-slide system. The work piece
is also modeled as a distributed inertia element with a length L
w
, mass per unit
length m
w
, area moment of inertia I
w
about the bending axis, and Young’s
modulus of elasticity E
w
. Since the model shown in Figure 2.27 consists of
distributed inertial elements, this model has infinite number of degrees of
freedom. In the modeling, the beam model used for the turret is considered
2.5 Model Construction 59
Tool
Tool slide
Turret
Machine bed
Cutting force
Physical system Vibratory model
Turret and slide
stiffness and
damping
Tool
Cantilever beam
(work piece)
Cutting force
Turret
J
, M
m
L
w
, m
w
, E
w
, I
w
L
b
, m
b
, E
b
, I
b
c
Beam fixed at each end
(machine bed)
Work piece
FIGURE 2.27
Work-piece-tool turning system and vibratory model of this system.
16
M. U. Jen and E. B. Magrab, “The dynamic interaction of the cutting process, work piece, and
lathe’s structure in facing,” ASME Journal of Manufacturing Science and Engineering, Vol. 118,
pp. 348–358 (1996).