Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

3.3.1 Natural Frequency
Translation Vibrations: Natural Frequency
For translation oscillations of a single degree-of-freedom system, the natural
frequency v
n
of the system is defined as
(3.14)
where k is the stiffness of the system and m is the system mass. The quantity
f
n
, which is also referred to as the natural frequency, has the units of Hz.
For the configuration shown in Figure 3.1, the vibratory system exhibits
vertical oscillations. For such oscillations, we make use of Eq. (3.6) and
Eq. (3.14) and obtain
(3.15)
where is the static deflection of the system.
Rotational Vibrations: Natural Frequency
Drawing a parallel to the definition of natural frequency of translation mo-
tions of a single degree-of-freedom system, the natural frequency for rota-
tional motions is defined as
(3.16)
where k
t
is the torsion stiffness of the system and J is the mass moment of in-
ertia of the system.
v
n
2pf
n
B
k
t
J
rad/s
d
st
v
n
2pf
n
B
g
d
st
rad/s
v
n
2pf
n
B
k
m
rad/s
80 CHAPTER 3 Single Degree-of-Freedom Systems
Design Guideline: For single degree-of-freedom systems, an in-
crease in the stiffness or a decrease in the mass or mass moment of in-
ertia increases the natural frequency, whereas a decrease in the stiffness
and/or an increase in the mass or mass moment of inertia decreases the
natural frequency. Equivalently, when applicable, the greater the static
displacement the lower the natural frequency; however, from practical
considerations too large of a static displacement may be undesirable.
Period of Undamped Free Oscillations
For an unforced and undamped system, the period of free oscillation of the
system is given by
(3.17)
Thus, increasing the natural frequency decreases the period and vice versa.
T
1
f
n
2p
v
n
In the following examples, we show how the static displacement can be
used to determine the natural frequency of a single degree-of-freedom system.
EXAMPLE 3.4
Natural frequency from static deflection of a machine system
For a particular choice of machinery mounting, the static deflection of a piece
of machinery is found to be . For two other choices of machin-
ery mounting, this deflection is found to be and .
Based on the static deflection, we will determine the natural frequency for
vertical vibrations for each of the three machinery mountings. To this end, we
make use of Eq. (3.15). Noting that the acceleration due to gravity g
9.81 m/s
2
, we arrive at the following for the natural frequencies of the three
machinery mountings:
EXAMPLE 3.5
Static deflection and natural frequency of the tibia bone in a human leg
Consider a person of 100 kg mass standing upright. We shall determine the
static deflection in the tibia bone and an estimate of the natural frequency of
axial vibrations. The tibia has a length of 40 cm, and it is modeled as a hol-
low tube with an inner diameter of 2.4 cm and an outer diameter of 3.4 cm.
The Young’s modulus of elasticity of the bone material is .
The static deflection will be determined by using Eq. (3.6), and Eq. (3.15)
will be used to determine the natural frequency. We assume that both legs
support the weight of the person equally, so that the weight supported by the
tibia is
(a)
To determine the stiffness k of the tibia, we use Case 1 of Table 2.3 to obtain
(b) 22.78 10
6
N/m
k
EA
L
12 10
10
N/m
2
2
p
4
313.4 10
2
2
2
12.4 10
2
2
2
4m
2
40 10
2
m
mg a
100
2
kg b 19.81 m/s
2
2 490.5 N
2 10
10
N/m
2
f
n3
1
2p B
g
d
st 3
1
2p B
9.81 m/s
2
10 10
3
m
4.98 Hz
f
n2
1
2p B
g
d
st2
1
2p B
9.81 m/s
2
1 10
3
m
15.76 Hz
f
n1
1
2p B
g
d
st1
1
2p B
9.81 m/s
2
0.1 10
3
m
49.85 Hz
d
st3
10 mmd
st2
1 mm
d
st1
0.1 mm
3.3 Natural Frequency and Damping Factor 81
Hence, from Eqs. (3.6), (a), and (b), the static deflection is given by
21.53 m (c)
and, from Eqs. (3.15) and (c), the natural frequency is
(d)
EXAMPLE 3.6
System with a constant natural frequency
In many practical situations, different pieces of machinery are used with
a single spring-mounting system. Under these conditions, one would like for
the system natural frequency to be constant for the different machinery-
mounting-system combinations; that is, we are looking for a system whose
natural frequency does not change as the system mass is changed. Through
this example, we examine how the spring-mounting system can be designed
and discuss a realization of this spring in practice.
From Eq. (3.14), it is clear that the natural frequency depends on the mass
of the system. In order to realize the desired objective of constant natural fre-
quency regardless of the system weight, we need a nonlinear spring whose
equivalent spring constant is given by
(a)
where A is a constant, the weight W mg, and g is the gravitational constant.
Then, from Eqs. (3.15) and (a), we arrive at
(b)
from which it is clear that the natural frequency is constant irrespective of the
weight of the mass.
Nonlinear Spring Mounting
When the side walls of a rubber cylindrical tube are compressed into the non-
linear region,
6
the equivalent spring stiffness of this system approximates the
characteristic given by Eq. (a). For illustrative purposes, consider a spring that
has the general force-displacement relationship
(c)
where a and b are scale factors and c is a shape factor. Noting that for a ma-
chinery of weight W, the static deflection x
o
is determined by using Eq. (c) as
F1x 2 a a
x
b
b
c
f
n
1
2p B
k
m
1
2p B
kg
W
1
2p
2Ag
Hz
k AW
f
n
1
2p B
g
d
st
1
2p B
9.81 m/s
2
21.53 m
107.4 Hz
d
st
mg
k
490.5 N
22.78 10
6
N/m
82 CHAPTER 3 Single Degree-of-Freedom Systems
6
E. I. Riven, Stiffness and Damping in Mechanical Design, Marcel Dekker, NY, pp. 58–61
(1999).
(d)
For “small” amplitude vibrations about x
o
, the linear equivalent stiffness of
this spring is determined from Eqs. (c) and (d) to be
(e)
Then, from Eqs. (3.14) and (e), we determine the natural frequency of this
system as
(f)
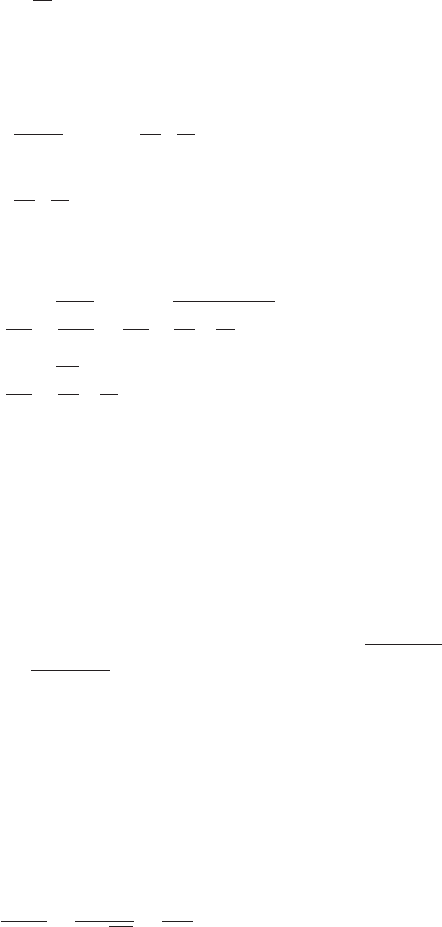
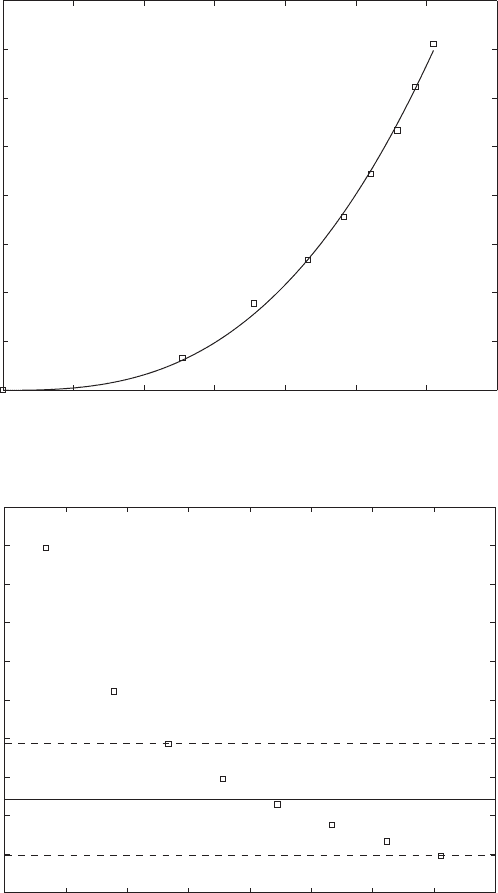
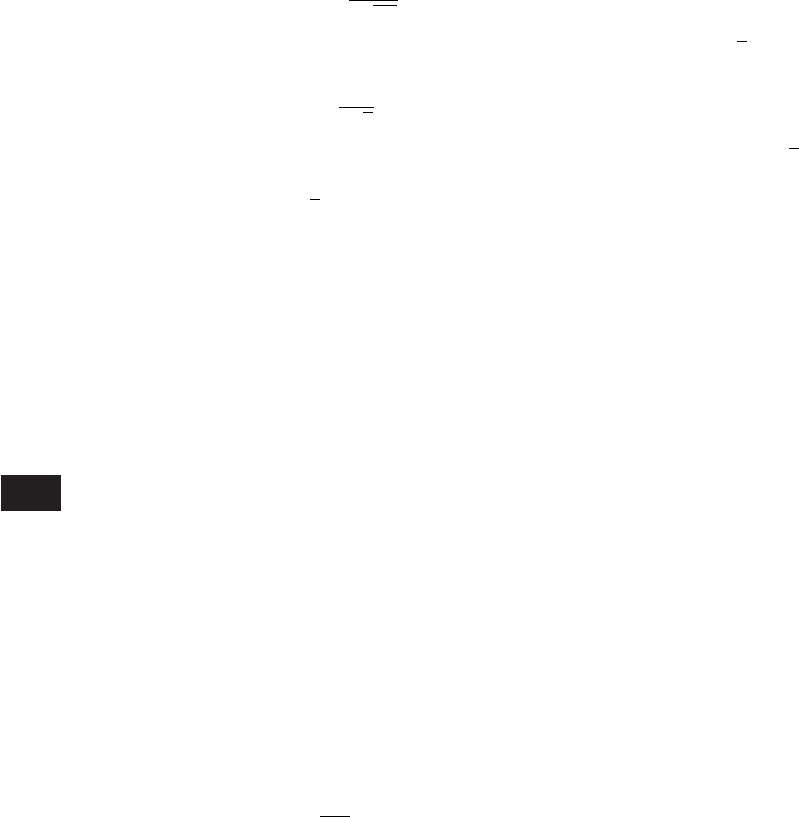
Representative Spring Data
We now consider the representative data of a nonlinear spring shown in
Figure 3.5a. By using standard curve-fitting procedures,
7
we find that a
2500 N, b 0.011 m, and c 2.77. After substituting these values into
Eq. (f), we arrive at the natural frequency values shown in Figure 3.5b. It
is seen that over a sizable portion of the load range, the natural frequency of
the system varies within the range of 8.8%. The natural frequency of
a system with a linear spring whose static displacement ranges from 12 mm
to 5 mm varies approximately from 4.5 Hz to
7.0 Hz or approximately 22% about a frequency
of 5.8 Hz.
3.3.2 Damping Factor
Translation Vibrations: Damping Factor
For translating single degree-of-freedom systems, such as those described by
Eq. (3.8), the damping factor or damping ratio z is defined as
(3.18)
where c is the system damping coefficient with units of Ns/m, k is the system
stiffness, and m is the system mass. The damping factor is a nondimensional
quantity.
z
c
2mv
n
c
22km
cv
n
2k
129.8/0.005
/2p Hz 2
129.8/0.012
/2p Hz 2
1
2p B
gc
b
a
W
a
b
1/12c2
Hz
f
n
1
2p B
k
eq
W/g
1
2p B
gc
b
a
W
a
b
1/c
ac
b
a
W
a
b
1c12/c
k
eq
dF1x 2
dx
`
x x
o
ac
b
a
x
o
b
b
c1
x
o
b a
W
a
b
1/c
3.3 Natural Frequency and Damping Factor 83
7
The MATLAB function lsqcurvefit from the Optimization Toolbox was used.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014
0
500
1000
1500
2000
2500
3000
3500
4000
x (m)
W (N)
(a)
0 500 1000 1500 2000 2500 3000 3500 4000
7
7.5
8
8.5
9
9.5
10
10.5
11
11.5
12
f
n
(Hz)
W (N)
(b)
FIGURE 3.5
(a) Curve fit of nonlinear spring data: squares– experimental data values; solid line– fitted curve;
(b) natural frequency for data values in (a) above: horizontal broken lines are within 8.8% from
the solid horizontal line.
3.3 Natural Frequency and Damping Factor 85
Critical Damping, Underdamping, and Overdamping
Defining the quantity c
c
, called the critical damping, as
(3.19)
the damping ratio is rewritten in the form
(3.20)
When . The significance of c
c
is discussed in Section 4.2, where
free oscillations of vibratory systems are considered. A system for which
is called an underdamped system and a system for which is
called an overdamped system. A system for which is called a critically
damped system.
Rotational Vibrations: Damping Factor
For rotating single degree-of-freedom systems such as those described by
Eq. (3.13), the damping ratio z is defined as
(3.21)
where the damping coefficient c
t
has the units Nms/rad.
From Eqs. (3.14) and (3.16), we see that the stiffness and inertia proper-
ties affect the natural frequency. From Eqs. (3.18) and (3.21), we see that
the damping ratio is affected by any change in the stiffness, inertia, or damp-
ing property. However, one can change more than one system parameter in
such a way that the net effect on z remains unchanged. This is shown in Ex-
ample 3.8.
Governing Equation of Motion in Terms of Natural Frequency
and Damping Factor
Introducing the definitions given by Eqs. (3.14) and (3.18) into Eq. (3.8), we
obtain
(3.22)
The significance of the quantities v
n
and z will become apparent when the
solution to Eq. (3.22) is discussed in detail in the subsequent chapters. If we
introduce the dimensionless time , then Eq. (3.22) can be written as
(3.23)
It is seen from Eq. (3.23) that the natural frequency associated with the non-
dimensional system is always unity (one), and that the damping factor z is the
only system parameter that appears explicitly on the left-hand side of the equa-
tion. We shall use both forms of Eqs. (3.22) and (3.23) in subsequent chapters.
d
2
x
dt
2
2z
dx
dt
x
f 1t2
k
t v
n
t
d
2
x
dt
2
2zv
n
dx
dt
v
n
2
x
f 1t 2
m
z
c
t
2J v
n
c
t
22k
t
J
z 1
z 10 z 1
c c
c
, z 1
z
c
c
c
c
c
2mv
n
22km
86 CHAPTER 3 Single Degree-of-Freedom Systems
In the absence of forcing, that is, when , the motion of a vibra-
tory system expressed in terms of nondimensional quantities can be described
by just one system parameter. This fact is further elucidated in Section 4.2,
where free oscillations are considered and it is shown that the qualitative nature
of these oscillations can be completely characterized by the damping factor. In
the presence of forcing, that is, , both the damping factor z and the
natural frequency v
n
are important for characterizing the nature of the re-
sponse. This is further addressed when the forced responses of single degree-
of-freedom systems are considered in Chapters 5 and 6.
Since the damping coefficient is one of the most important descriptors of
a vibratory system, it is important to understand its interrelationships with the
component’s parameters m (or J), c (or c
t
), and k (or k
t
). We shall illustrate
some of these relationships with the following example.
EXAMPLE 3.7
Effect of mass on the damping factor
A system is initially designed to be critically damped—that is, with a damping
factor of . Due to a design change, the mass of the system is increased
20%—that is, from m to 1.2m. Will the system still be critically damped if the
stiffness and the damping coefficient of the system are kept the same?
The definition of the damping factor is given by Eq. (3.18) and that for
the critical damping factor is given by Eq. (3.19). Then, the damping factor of
the system after the design change is given by
Therefore, the system with the increased mass is no longer critically damped;
rather, it is now underdamped.
EXAMPLE 3.8
Effects of system parameters on the damping ratio
An engineer finds that a single degree-of-freedom system with mass m, damp-
ing c, and spring constant k has too much static deflection d
st
. The engineer
would like to decrease d
st
by a factor of 2, while keeping the damping ratio
constant. We shall determine the different options.
Noting that this is a problem involving vertical vibrations, it is seen from
Eqs. (3.6), (3.15), and (3.18) that
(a)
From Eqs. (a), we see that there are three ways that one can achieve the goal.
2z
c
m
B
d
st
g
c
B
d
st
gm
2
1
m
B
c
2
d
st
g
d
st
mg
k
z
new
c
22k11.2m2
0.91
c
22km
0.91
c
c
c
0.91 1 0.91
z 1
f 1t2 0
f 1t2 0
3.3 Natural Frequency and Damping Factor 87
First Choice
For the first choice, let c remain constant. Then, when d
st
is reduced by
one-half,
(b)
and, therefore, the mass has to be reduced by a factor of and the stiffness
has to be increased by a factor of ; that is,
(c)
since,
(d)
Thus, for and c held constant, and .
Second Choice
For the second choice, let m remain constant. Then, when d
st
is reduced by
one-half,
(e)
and, therefore, the damping coefficient has to be increased by a factor of
and the stiffness has to be increased by a factor of 2; that is,
(f)
since,
(g)
Thus, for and m held constant, and .
Third Choice
For the last choice, let k remain constant. Then, when d
st
is reduced by one-half,
(h)
Thus, the mass has to be reduced by a factor of 2; that is,
(i)m 씮
m
2
d
st
mg
k
씮
m
2
g
k
d
st
2
c 씮 c22
k 씮 2kd
st
씮 d
st
/2
d
st
mg
k
씮
mg
2k
d
st
2
c 씮 c22
and
k 씮 2k
22
2z
1
m
B
c
2
d
st
g
씮
1
m
B
c
2
d
st
2g
k 씮 k22m 씮 m/ 22d
st
씮 d
st
/2
d
st
mg
k
씮
m
22
g
k22
d
st
2
m 씮
m
22
and
k 씮 k22
22
22
2z c
B
d
st
gm
2
씮 c
B
d
st
2gm
2
88 CHAPTER 3 Single Degree-of-Freedom Systems
Furthermore, since
(j)
the damping coefficient has to be reduced by a factor of ; that is,
(k)
Thus, for and k held constant, and .
Notice that in all three cases the natural frequency increases by a factor
of . The results of this example can be generalized to a design guideline
(see Exercises 3.22 and 3.23).
In the next two sections, the governing equations for different types of
damping models and forcing conditions are presented. For all of these cases,
translational motions are considered for illustrative purposes, and the equa-
tions are obtained by carrying out a force balance along the direction of mo-
tion. The form of the governing equations will be similar for systems involv-
ing rotational motions.
3.4 GOVERNING EQUATIONS FOR DIFFERENT TYPES OF DAMPING
The governing equations of motion for systems with different types of damp-
ing are obtained by replacing the term corresponding to the force due to vis-
cous damping with the force due to either the fluid, structural, or dry friction
type damping. Solutions for different periodically forced systems are given
in Section 5.8, where equivalent viscous damping coefficients for different
damping models are obtained.
Coulomb or Dry Friction Damping
After using Eq. (2.52) to replace the term in Eq. (3.8), the governing equa-
tion of motion takes the form
(3.24)
which is a nonlinear equation because the damping characteristic is piece-
wise linear. This piece-wise linear property can be used to find the solution of
this system.
Fluid Damping
After using Eq. (2.54) to replace the cx˙ term in Eq. (3.8), the governing equa-
tion takes the form
Nonlinear dry
friction force
m
d
2
x
dt
2
kx mmgsgn 1x
#
2 f 1t 2
cx
#
22
c 씮 c/ 22m 씮 m/2d
st
씮 d
st
/2
c 씮
c
22
22
2z
c
2km
⎫
⎬
⎭
3.5 Governing Equations for Different Types of Applied Forces 89
(3.25)
which is a nonlinear equation due to the nature of the damping.
Structural Damping
After using Eq. (2.57) to replace the cx˙ term in Eq. (3.8), we arrive at the gov-
erning equation
(3.26)
Equation (3.26) is further addressed in Section 5.8.
3.5 GOVERNING EQUATIONS FOR DIFFERENT TYPES OF APPLIED FORCES
In Section 3.2, we addressed governing equations of single degree-of-
freedom systems whose inertial elements were subjected to direct excitations.
Here, we address governing equations of single degree-of-freedom systems
subjected to base excitations, systems excited by rotating unbalance, and sys-
tems immersed in a fluid.
3.5.1
System with Base Excitation
The base-excitation model is a prototype that is useful for studying buildings
subjected to earthquakes, packaging during transportation, vehicle response,
and for designing accelerometers (see Section 5.6). Here, the physical system
of interest is represented by a single degree-of-freedom system whose base is
subjected to a displacement disturbance y(t), and an equation governing the
motion of this system is sought to determine the response of the system x(t).
If the system of interest is an automobile, then the road surface on which
it is traveling can be a source of the disturbance y(t) and the vehicle response
x(t) is to be determined. To avoid failure of electronic components during trans-
portation, a base-excitation model is used to predict the vibration response of
the electronic components. For buildings located above or adjacent to subways
or above ground railroad tracks, the passage of trains can act as a source of
excitation to the base of the building. In designing accelerometers, the ac-
celerometer responses to different base excitations are studied to determine the
appropriate accelerometer system parameters, such as the damping factor.
A prototype of a single degree-of-freedom system subjected to a base ex-
citation is illustrated in Figure 3.6. The system represents an instrumentation
package being transported in a vehicle. The vehicle provides the base excita-
tion y(t) to the instrumentation package modeled as a single degree-of-
m
d
2
x
dt
2
kbpsgn1x
#
2x kx f 1t 2
Nonlinear fluid
damping force
m
d
2
x
dt
2
c
d
x
#
x
#
kx f 1t2
⎫
⎬
⎭