Birge J.R., Louveaux F. Introduction to Stochastic Programming
Подождите немного. Документ загружается.

184 5 Two-Stage Recourse Problems
Step 3.For k = 1,...,K solve the linear program
min w = q
T
k
y
s. t. Wy = h
k
−T
k
x
ν
,
y ≥0 .
(1.5)
Let
π
ν
k
be the simplex multipliers associated with the optimal solution of Problem
k of type (1.5). Define
E
s+1
=
K
∑
k=1
p
k
·(
π
ν
k
)
T
T
k
(1.6)
and
e
s+1
=
K
∑
k=1
p
k
·(
π
ν
k
)
T
h
k
. (1.7)
Let w
ν
= e
s+1
−E
s+1
x
ν
.If
θ
ν
≥ w
ν
, stop; x
ν
is an optimal solution. Otherwise,
set s = s + 1 , add to the constraint set (1.4), and return to Step 1.
The method consists of solving an approximation of (3.1.2) by using an outer
linearization of Q . This approximation is program (1.2)–(1.4). It is called the mas-
ter program. It consists of finding a proposal x , sent to the second stage. Two
types of constraints are sequentially added: (i) feasibility cuts (1.3) determining
{x | Q(x) < +∞} and (ii) optimality cuts (1.4), which are linear approximations
to Q on its domain of finiteness. We first illustrate the optimality cuts, in an ex-
ample where x ∈ K
2
is always satisfied. We then provide details on how to obtain
feasibility cuts.
a. Optimality cuts
Consider the following problem.
Example 1
Let
z = min 100x
1
+ 150x
2
+ E
ξ
(q
1
y
1
+ q
2
y
2
)
s. t. x
1
+ x
2
≤ 120 ,
6y
1
+ 10y
2
≤ 60x
1
,
8y
1
+ 5y
2
≤ 80x
2
,
y
1
≤ d
1
, y
2
≤ d
2
,
x
1
≥ 40 , x
2
≥ 20 , y
1
,y
2
≥ 0 ,
5.1 The L -Shaped Method 185
where ξ
T
=(d
1
,d
2
,q
1
,q
2
) takes on the values (500,100,−24,−28) with proba-
bility 0.4and(300,300,−28,−32) with probability 0.6.
Observe that, in this example, the second stage is always feasible ( y =(0, 0)
T
is
always feasible as x ≥ 0andd ≥ 0 ). Thus x ∈ K
2
is always true and Step 2 can
simply be omitted.
The example illustrates the optimality cuts in Step 3 and the effect on the master
program. Steps 1 and 3 of the L -shaped method require the solution of a number of
linear programs. They can easily be obtained through your favorite LP-solver. They
can also be checked by constructing the optimal dictionaries (see Exercise 1). You
may also trust the authors of this book.
The sequence of iterations of the L -shaped method is as follows:
Iteration 1:
Step 1. Ignoring
θ
, the master program is simply z = min{100x
1
+150x
2
|x
1
+x
2
≤
120 , x
1
≥ 40 , x
2
≥ 20} with solution x
1
=(40,20)
T
and
θ
1
= −∞ .
Step 3.
• For
ξ
=
ξ
1
, solve the program
w = min{−24y
1
−28y
2
| 6y
1
+ 10y
2
≤ 2400 , 8y
1
+ 5y
2
≤ 1600 ,
0 ≤ y
1
≤500 , 0 ≤ y
2
≤100} .
The solution is w
1
= −6100 , y
T
=(137.5,100) ,
π
T
1
=(0,−3,0, −13) .
• For
ξ
=
ξ
2
, solve the program
w = min{−28y
1
−32y
2
| 6y
1
+ 10y
2
≤ 2400 , 8y
1
+ 5y
2
≤ 1600 ,
0 ≤ y
1
≤300 , 0 ≤ y
2
≤300} .
The solution is w
2
= −8384 , y
T
=(80,192) ,
π
T
2
=(−2.32,−1.76,
0,0) .
Using h
1
=(0,0, 500,100)
T
and h
2
=(0,0, 300,300)
T
in (1.7), one obtains
e
1
= 0.4 ·
π
T
1
·h
1
+ 0.6 ·
π
T
2
·h
2
= 0.4 ·(−1300)+0.6 ·(0)=−520 .
The matrix T is identical in the two scenarios. It consists of two columns
(−60,0, 0,0)
T
and (0,−80,0, 0)
T
. Thus, (1.6)gives
E
1
= 0.4 ·
π
T
1
T + 0.6 ·
π
T
2
T = 0.4(0,240)+0.6(139.2, 140.8)
=(83.52,180.48) .
Finally, as x
1
=(40,20)
T
, w
1
= −520 −(83.52,180.48) ·x
1
= −7470.4.
Thus, w
1
= −7470.4 >
θ
1
= −∞ , add the cut
186 5 Two-Stage Recourse Problems
83.52x
1
+ 180.48x
2
+
θ
≥−520 .
Iteration 2:
Step 1.Solve
z = min{100x
1
+ 150x
2
+
θ
| x
1
+ x
2
≤120 , x
1
≥ 40 , x
2
≥ 20 ,
83.52x
1
+ 180.48x
2
+
θ
≥−520}
with solution z = −2299.2, x
2
=(40,80)
T
,
θ
2
= −18299.2.
Step 3.
• For
ξ
=
ξ
1
the program
w = min{−24y
1
−28y
2
| 6y
1
+ 10y
2
≤ 2400 , 8y
1
+ 5y
2
≤ 6400 ,
0 ≤ y
1
≤ 500 , 0 ≤ y
2
≤ 100}
has solution w
1
= −9600 , y
T
=(400,0) ,
π
T
1
=(−4,0,0, 0)
T
.
• For
ξ
=
ξ
2
the program
w = min{−28y
1
−32y
2
| 6y
1
+ 10y
2
≤ 2400 , 8y
1
+ 5y
2
≤ 6400 ,
0 ≤ y
1
≤ 300 , 0 ≤ y
2
≤ 300}
has solution: w
2
= −10320 , y
T
=(300,60) ,
π
T
2
=(−3.2,0,−8.8,0) .
Apply formulas (1.6)and(1.7) to obtain
e
2
= 0.4 ·(0)+0.6 ·(−2640)=−1584 ,
E
2
= 0.4 ·(240,0)+0.6 ·(192,0)=(211.2,0) .
As w
2
= −1584 −211.2 ·40 = −10032 > −18299.2 , add the cut
211.2x
1
+
θ
≥−1584 .
Iteration 3:
Step 1. Master program has solution z = − 1039.375 , x
3
=(66.828, 53.172)
T
,
θ
3
= −15697.994 .
Step 3. Add the cut
115.2x
1
+ 96x
2
+
θ
≥−2104 .
Iteration 4:
5.1 The L -Shaped Method 187
Step 1. Master program has solution z = −889.5, x
4
=(40, 33.75)
T
,
θ
4
= −9952 .
Step 3. The second-stage program for
ξ
=
ξ
2
has multiple solutions. Selecting one
of them, we add the cut
133.44x
1
+ 130.56x
2
+
θ
≥ 0 .
Iteration 5:
Step 1. Solve first stage program
z = min{100x
1
+ 150x
2
+
θ
| x
1
+ x
2
≤ 120 , x
1
≥ 55 , x
2
≥ 25 ,
83.52x
1
+ 180.48x
2
+
θ
≥−520 , 211.2x
1
+
θ
≥−1584 ,
115.2x
1
+ 96x
2
+
θ
≥−2104 ,
133.44x
1
+ 130.56x
2
+
θ
≥ 0} .
It has solution z = −855.833 , x
5
=(46.667,36.25)
T
,
θ
5
= −10960 .
Step 3.
• For
ξ
=
ξ
1
the program
w = min{−24y
1
−28y
2
| 6y
1
+ 10y
2
≤ 2800 , 8y
1
+ 5y
2
≤ 2900 ,
0 ≤ y
1
≤ 500 , 0 ≤ y
2
≤ 100}
has the solution w
1
= −10000 , y
T
=(300,100) ,
π
T
1
=(0,−3,
0,−13) .
• For
ξ
=
ξ
2
the program
w = min{−28y
1
−32y
2
| 6y
1
+ 10y
2
≤ 2800 , 8y
1
+ 5y
2
≤ 2900,
0 ≤ y
1
≤ 300 , 0 ≤ y
2
≤ 300}
has the solution w
2
= −11600 , y
T
=(300,100) ,
π
T
2
=(−2.32,−1.76,
0,0) .
Apply formulaes (1.6)and(1.7) to obtain
e
5
= 0.4 ·(−1300)+0.6 ·(0)=−520 ,
E
5
= 0.4 ·(0, 240)+0.6 ·(139.2,140.8)=(83.52,180.48) .
As w
5
= −520 −(83.52,180.48) ·x
5
= −10960 =
θ
5
, stop.
x
5
=(46.667,36.25)
T
is the optimal solution.
Note that, as Example 1 is small, it is easy to write down the extensive form of
Example 1 and solve it with an LP-solver to check whether (46.667,36.25)
T
is
188 5 Two-Stage Recourse Problems
the optimal solution. Exercise 1 illustrates how optimality cuts are obtained through
dictionaries and presents some simple and useful checks.
As indicated above, the second-stage program for
ξ
=
ξ
2
at Iteration 4 has mul-
tiple solutions. An alternative cut is
165.12x
1
+ 46.08x
2
+
θ
≥−1584 .
Using this cut instead of the one used above, the algorithm also terminates at Itera-
tion 5.
Example 2
Let
z = min E
ξ
(y
1
+ y
2
)
s. t. 0 ≤x ≤ 10 ,
y
1
−y
2
=
ξ
−x ,
y
1
,y
2
≥ 0 ,
where
ξ
takes the values 1 , 2 and 4 with probability 1/3 each.
Observe that h =
ξ
, T =[1] and x are all scalars. Also observe that Step 2 can
be omitted. As an exercise, we provide the calculations of Iteration 1. Take x
1
= 0
as starting point. Step 3 of Iteration 1 includes the following:
• For
ξ
=
ξ
1
, solve the program w = min{y
1
+y
2
|y
1
−y
2
= 1 , y
1
,y
2
≥0}.The
solution is w
1
= 1, y
T
=(1,0) ,
π
1
=(1) .
• For
ξ
=
ξ
2
, solve the program w = min{y
1
+y
2
|y
1
−y
2
= 2 , y
1
,y
2
≥0}.The
solution is w
2
= 2, y
T
=(2,0) ,
π
2
=(1) .
• For
ξ
=
ξ
3
, solve the program w = min{y
1
+y
2
|y
1
−y
2
= 4 , y
1
,y
2
≥0}.The
solution is w
3
= 4, y
T
=(4,0) ,
π
3
=(1) .
• Using h
k
=
ξ
k
, one obtains e
1
= 1/3·1·(1+2+4)= 7/3.Formula(1.6)gives
E
1
= 1/3 ·1 ·(1 + 1 + 1)=1 . Finally, as x
1
=(0) , w
1
= 7/3 > −∞ ;addthe
cut,
θ
≥ 7/3 −x .
Repeating these calculations, the iterations of the L -shaped method can be sum-
marized as follows:
Iteration 1:
Step 1. x
1
= 0,
Step 3. x
1
is not optimal; add the cut
θ
≥ 7/3 −x .
Iteration 2:
5.1 The L -Shaped Method 189
Step 1. x
2
= 10 ,
Step 3. x
2
is not optimal; add the cut
θ
≥ x −7/3.
Iteration 3:
Step 1. x
3
= 7/3,
Step 3. x
3
is not optimal; add the cut
θ
≥ (x + 1)/3.
Iteration 4:
Step 1. x
4
= 1.5,
Step 3. x
4
is not optimal; add the cut
θ
≥ (5 −x)/3.
Iteration 5:
Step 1. x
5
= 2,
Step 3. x
5
is optimal.
We now illustrate in this example that these cuts can be seen as supporting hy-
perplanes of Q(x) .
To see this, recall that Q(x)=E
ξ
Q(x,ξ)=
K
∑
k=1
p
k
Q(x,
ξ
k
) ,where
Q(x,
ξ
)=min{y
1
+ y
2
| y
1
−y
2
=
ξ
−x , y
1
,y
2
≥ 0} .
In this very simple example, it is easy to see that if x ≤
ξ
, the second-stage optimal
solution is y
T
=(
ξ
−x,0) while it is y
T
=(0,x −
ξ
) if x ≥
ξ
. Thus
Q(x,
ξ
)=
ξ
−x if x ≤
ξ
,
x −
ξ
if x ≥
ξ
.
Figure 3 represents the functions Q(x,1) , Q(x,2) , Q(x,4) as well as Q(x) .
Now, consider again Iteration 1. x
1
= 0 is the starting point. Step 3 obtains the
cut
θ
≥ 7/3 −x . From our construction, we see that, for x = x
1
, Q(x, 1)=1,
Q(x,2)=2, Q(x,4)=4andQ(x)=7/3 . But we can also conclude that “around
x = x
1
,” Q(x,1)=1 −x , Q(x, 2)=2 −x , Q(x,4)=4 −x and Q(x)=7/3 −x .
In fact, “around x = x
1
”issimply 0≤ x ≤ 1 . This can easily be seen from the
construction of Q(x,1) where Q(x,1) changes when x = 1 . In general, such a
range can be obtained by linear programming sensitivity analysis around the second-
stage optimal solutions.
We conclude that Q(x)=7/3 −x within 0 ≤ x ≤ 1 . The optimality cut at
the end of Iteration 1 is nothing other than
θ
≥ 7/3 −x . It coincides with Q(x)=
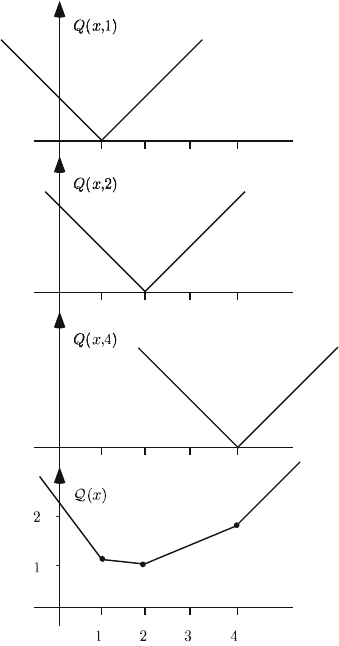
190 5 Two-Stage Recourse Problems
Fig. 3 Recourse functions for Example 2.
7/3−x within 0 ≤x ≤1 and is a lower bound on Q(x) elsewhere (see Section 5.1
for the proof). We say that the optimality cut is a supporting hyperplane of Q(x) .
The L -Shaped algorithm successively adds four cuts which are supporting hy-
perplanes on the intervals [0,1] , [4,10] , [2,4] and [1,2] , respectively. Thus, at
the beginning of Iteration 5, a full description of Q(x) is available through the
four cuts. Obviously, such a full description is not needed. In fact, the optimum is
found here as soon as the supporting hyperplanes of the intervals [1,2] and [2,4]
are known. If, by chance, these two intervals were to be considered in the first two
iterations, then two cuts (and three iterations) would suffice to find the optimum.
Thus, the efficiency of the L -Shaped algorithm can be influenced by an adequate
choice of the starting point.
Finally, observe that, by linear programming duality, the cuts (1.4) can also be
obtained from the primal second-stage solutions. Indeed, as we have seen in the
proof of Proposition 3 of Chapter 3, solving the second-stage program
5.1 The L -Shaped Method 191
Q(x,
ξ
)=min
y
{q(
ω
)y |W(
ω
)y = h(
ω
) −T(
ω
)x , y ≥ 0}
amounts to finding an optimal basis B(
ω
) (a square submatrix of W ) such that
y
B
= B(
ω
)
−1
(h(
ω
) −T(
ω
)x) , y
N
= 0andq
B
(
ω
)
T
B(
ω
)
−1
. W ≤ q(
ω
)
T
,where
y
B
and y
N
are the subvectors of y associated to the columns of B(
ω
) andtothe
remaining columns, respectively. It follows that
Q(x,
ξ
)=q
B
(
ω
)
T
·B(
ω
)
−1
(h(
ω
) −T(
ω
)x) .
Sensitivity analysis shows that, for fixed
ξ
, this relation holds for all x ’s such
that B(
ω
)
−1
(h(
ω
) −T(
ω
)x) ≥ 0 . Noticing that
π
T
= q
B
(
ω
)
T
·B(
ω
)
−1
, one can
show that the cut (1.4) is identical to
θ
≥ E
ξ
{q
B
(
ω
)
T
·B(
ω
)
−1
(h(
ω
) −T(
ω
)x)}
and that the right-hand side of the cut coincides with Q(x) within
∩
ξ
∈
Ξ
{x | B(
ω
)
−1
(h(
ω
) −T(
ω
)x ≥0} .
The construction of the cuts from the primal second-stage solutions and the influ-
ence of the starting point are further discussed in Exercise 2.
b. Feasibility cuts
Step2ofthe L -shaped method consists of determining whether a first-stage deci-
sion x ∈ K
1
is also second stage feasible, i.e. x ∈ K
2
. This step can be done as
follows:
Step 2.For k = 1,...,K solve the linear program
min w
= e
T
v
+
+ e
T
v
−
(1.8)
s. t. Wy+ Iv
+
−Iv
−
= h
k
−T
k
x
ν
,
y ≥0 , v
+
≥ 0 , v
−
≥ 0 ,
(1.9)
where e
T
=(1,...,1) , until, for some k , the optimal value w
> 0 . In this case,
let
σ
ν
be the associated simplex multipliers and define
D
r+1
=(
σ
ν
)
T
T
k
(1.10)
and
d
r+1
=(
σ
ν
)
T
h
k
(1.11)
to generate a constraint (called a feasibility cut)oftype(1.3). Set r = r + 1,addto
the constraint set (1.3), and return to Step 1. If for all k , w
= 0 , go to Step 3.
192 5 Two-Stage Recourse Problems
To illustrate the feasibility cuts, consider Example 4.2:
min 3x
1
+ 2x
2
−E
ξ
(15y
1
+ 12y
2
)
s. t. 3y
1
+ 2y
2
≤ x
1
,
2y
1
+ 5y
2
≤ x
2
,
.8ξ
1
≤ y
1
≤ ξ
1
,
.8ξ
2
≤ y
2
≤ ξ
2
,
x,y ≥ 0 ,a.s.,
with ξ
1
= 4or6andξ
2
= 4 or 8 , independently, with probability 1/2 each and
ξ =(ξ
1
,ξ
2
)
T
.
To keep the discussion short, assume the first considered realization of ξ is
(6,8)
T
. If not, many cuts would be needed. Starting from an initial solution
x
1
=(0,0)
T
, Program (1.8)–(1.9) reads as follows
w
= min v
+
1
+ v
−
1
+ v
+
2
+ v
−
2
+ v
+
3
+ v
−
3
+ v
+
4
+ v
−
4
+ v
+
5
+ v
−
5
+ v
+
6
+ v
−
6
s. t. v
+
1
−v
−
1
+ 3y
1
+ 2y
2
≤ 0 ,
v
+
2
−v
−
2
+ 2y
1
+ 5y
2
≤ 0 ,
v
+
3
−v
−
3
+ y
1
≥ 4.8 ,
v
+
4
−v
−
4
+ y
2
≥ 6.4 ,
v
+
5
−v
−
5
+ y
1
≤ 6 ,
v
+
6
−v
−
6
+ y
2
≤ 8 ,
v
+
,v
−
,y ≥0
The optimal solution is w
= 11.2 with non-zero variables v
+
3
= 4.8and
v
+
4
= 6.4 . The corresponding dual variables are
σ
1
=(−3/11,−1/11,1,1, 0,0) .
We observe that h =(0,0, 4.8, 6.4,6,8)
T
and that T consists of the two columns
(−1,0, 0,0,0, 0)
T
and (0,−1,0,0, 0,0)
T
; thus, D
1
=(−0.273, −0.091, 1,1,0, 0) .
T =(0.273,0.091) , while d
1
=(−0.273, −0.091,1,1,0,0) ·h = 11.2 , creating the
feasibility cut 3/11x
1
+ 1/11x
2
≥ 11.2or3x
1
+ x
2
≥ 123.2.
The first-stage solution is then x
2
=(41.067,0)
T
. A second feasibility cut is
x
2
≥ 22.4. The first-stage solution becomes x
3
=(33.6,22.4)
T
. A third feasibility
cut x
2
≥41.6 is generated. The first-stage solution is:
x
4
=(27.2, 41.6)
T
,
which yields feasible second-stage decisions.
This example also illustrates that generating feasibility cuts by a mere application
of Step 2 of the L -shaped method may not be efficient. Indeed, a simple look at the
problem reveals that, for feasibility when
ξ
1
= 6and
ξ
2
= 8 , it is at least necessary
to have y
1
≥ 4.8andy
2
≥ 6.4 , which in turn implies x
1
≥ 27.2andx
2
≥ 41.6.
5.1 The L -Shaped Method 193
We may then consider the following program as a reasonable initial problem:
min 3x
1
+ 2x
2
+ Q(x)
s. t. x
1
≥ 27.2 ,
x
2
≥ 41.6 ,
which immediately appears to be feasible. Such situations frequently occur in prac-
tice and are now discussed.
In some cases, Step 2 can be simplified. A first case is when the second stage is
always feasible. The stochastic program is then said to have complete recourse. Let,
as in (1.1), the second-stage constraint be:
Wy = h −Tx, y ≥0 .
We repeat here the definition given in Section 3.1d. for complete recourse for con-
venience.
Definition. A stochastic program is said to have complete recourse when pos W =
ℜ
m
2
.Itissaidtohaverelatively complete recourse when K
2
⊇ K
1
, i.e., x ∈ K
1
implies h −Tx∈ pos W for any h, T realization of h,T .
If we consider the farmer’s problem in Section 1.1, program (1.1.2) has complete
recourse. The second stage just serves as a measure of the cost to the farmer of
the decisions taken. Any lack of production can be covered by a purchase. Any
production in excess can be sold. If we consider the power generation model (1.3.6),
it has complete recourse if there exists at least one technology with zero lead time
(
Δ
i
= 0) . If the demand in a given period t exceeds what can be delivered by the
available equipment, an investment is made in this (usually expensive) technology
to cover the needed demand.
A second case is when it is possible to derive some constraints that have to be sat-
isfied to guarantee second-stage feasibility. These constraints are sometimes called
induced constraints. They can be obtained from a good understanding of the model.
A simple look at the second-stage program in the example reveals the conditions
for feasibility. Constraints x
1
≥ 27.2andx
2
≥ 41.6 are examples of induced con-
straints. In the power generation model (1.3.6) of Section 1.3, the total possible
demand in a given stage t is obtained from (1.3.8)as
m
∑
j= 1
d
t
j
. The maximal possi-
ble demand in stage t is thus D
t
= max
ξ
∈
Ξ
m
∑
j= 1
d
t
j
.Stage t feasibility will thus require
enough investments in the various technologies to cover the maximal demand, i.e.,
n
∑
i=1
a
i
(w
t−
Δ
i
i
+ g
i
) ≥ D
t
.
Again, with the introduction of these induced constraints, Step 2 of the L -shaped
algorithm can be dropped.