Фафурин В.А., Терюшов И.Н. Автоматизация технологических процессов и производств
Подождите немного. Документ загружается.

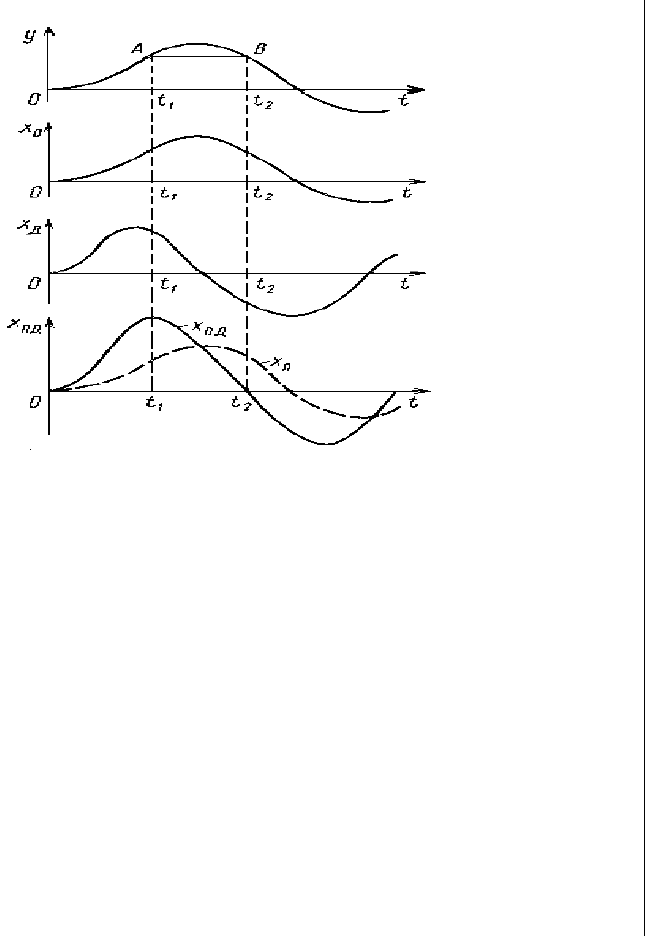
Влияние введения Д-составляющей в пропорциональный закон
регулирования иллюстрируется графиком, приведенным на рис. 3.31,
где показаны изменение пропорциональной х
П
и дифференциальной
х
д
составляющих, а также пропорционально-дифференциальной х
пд
составляющей, т. е. ПД-закона регулирования при непрерывном
изменении входной величины у.
Рис. 3.31. График, иллюстрирующий влияние введения
дифференциальной составляющей в пропорциональный закон
регулирования
В случае применения П- регулятора при одинаковом отклоне-
нии регулируемой величины от заданного значения (точки А и В)
величина воздействия на объект будет одинакова независимо от того,
удаляется ее значение от заданного или приближается к нему. Для
повышения же качества регулирования воздействие регулятора
должно было бы быть большим в случае удаления регулируемой
величины от заданного значения, чем при противоположном
изменении. Это требование выполняется при введении в закон
регулирования Д-составляющей; при нахождении регулируемой
величины в точке А выходная величина ПД-регулятора больше
(воздействия П- и Д-составляющих регулятора складываются), чем в
точке В (воздействия П- и Д-составляющих регулятора вычитаются).
При наличии в законе регулирования Д-составляющей регулятор
реагирует и на изменения скорости входной величины, т. е. на
интенсивность ее изменения; такой регулятор вступает в работу
быстрее, чем П-регулятор. Введение в закон регулирования
воздействия по производной приводит к усилению влияния
регулятора на переходный процесс, при этом сокращается время
переходного процесса и уменьшаются колебания регулируемой
величины.
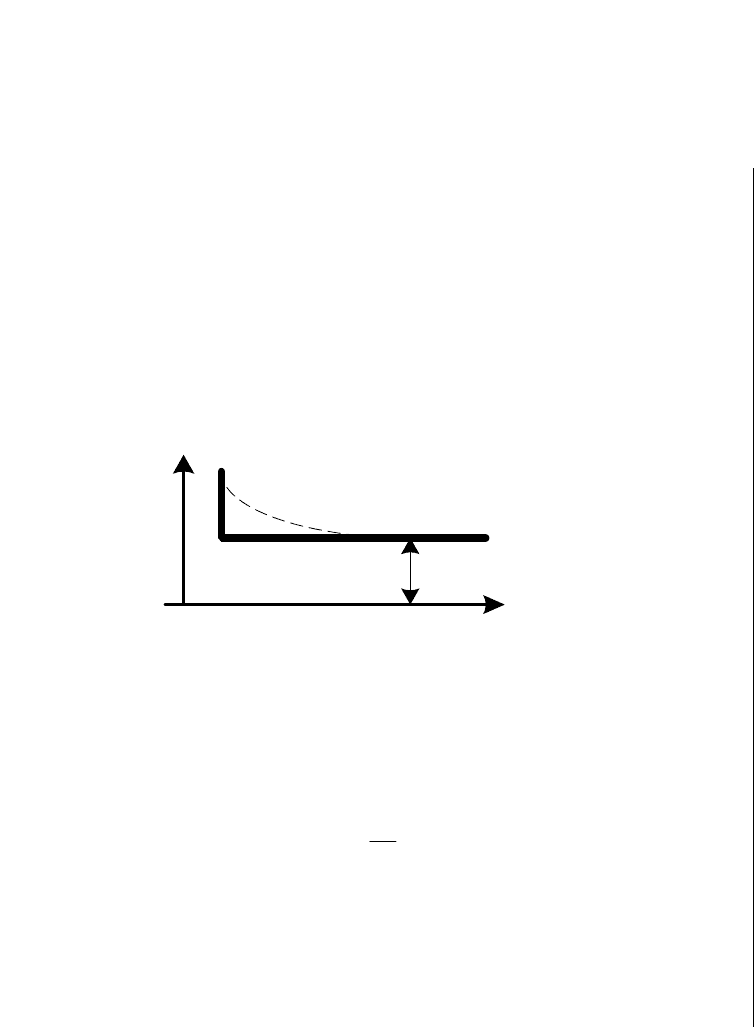
Переходная характеристика ПД -регулятора h(t) приведена на
рис. 3.32. Она отличается от переходной характеристики П-
регулятора большим изменением выходной величины сразу же
после изменения величины у. С течением времени отклонение х
уменьшается, и величина х становится постоянной и равной Х
П
в
соответствии со значением предела пропорциональности П-
составляющей регулятора. Физически действие предварения можно
представить как временное уменьшение действия обратной связи
регулятора.
t
kp
h(t)
Рис.3.32 Переходная характеристика ПД-регулятора
Динамическая характеристика ПД- регулятора для случая, когда
входная величина изменяется с постоянной скоростью, приведена на
рис. 3.33. Для сравнения там же приведена аналогичная
характеристика для П- регулятора.
Выходные величины П- и ПД- регуляторов изменяются с
одинаковой скоростью, равной
dt
dy
k
р
, но при ПД- регуляторе
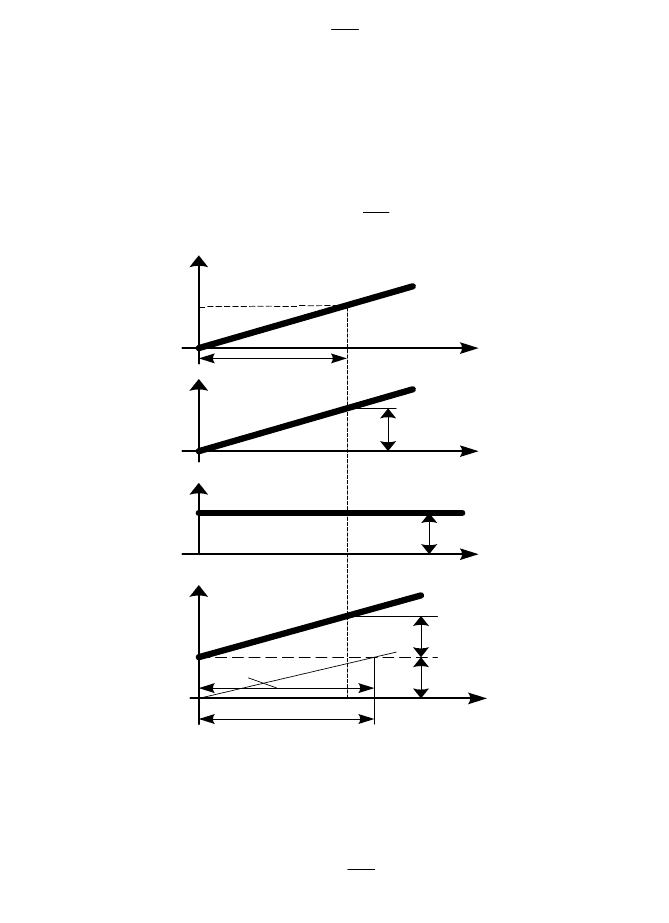
выходная величина всегда на
dt
dy
Т
Д
больше, чем при П- регуляторе.
По сравнению с Х
П
выходная величина Х
ПД
достигает тех же значений
с опережением, равным Т
Д
/k
p
. По графикам (см. рис. 3.33) можно
найти время дифференцирования Т
Д
. Обозначим через t
1
время, в
течение которого величина Хп достигает ступенчатого изменения
величины Х
Д
, равного
dt
dy
ТХ
ДД
. (45)
Хд
y
1
t
1/(dy/dt)
kp
Хп
0
0
Хпд
t
t
t
0
t1=TД/кр
кр
Тдdy/dt
1dy/dt
Тдdy/dt
Рис. 3.33. График изменения составляющих х
п
, х
д
и общей вы-
ходной величины Х
пд
ПД- регулятора при изменении входной величины
у с постоянной скоростью
Изменение Хп за время t
1
равно
1Р
t
dt
dy
kХ
П
. (46)
Приравняв Хп и Хд, получим
1
tkТ
РД
. (47)
Откуда
Р
Д
k
Т
t
1
.
(48)
Таким образом, время дифференцирования Тд- это отрезок
времени, на который выходная величина ПД- регулятора Хпд
опережает его пропорциональную составляющую Х
П
при изменении
входной величины с постоянной скоростью и при условии, что
коэффициент передачи регулятора k
Р
равен единице.
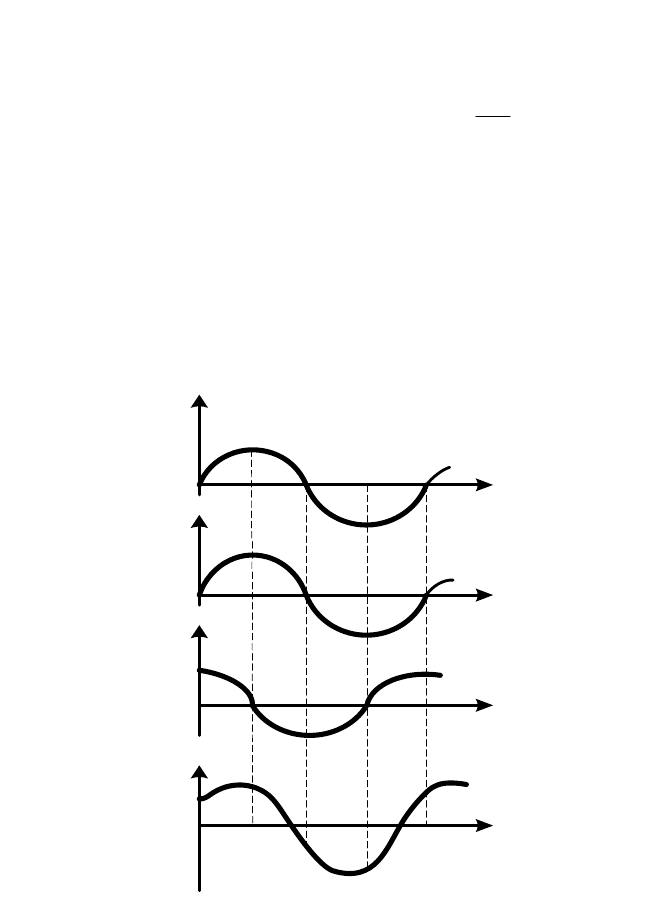
Графики, приведенные на рис. 3.34, позволяют сравнить
работу ПД- и П- регуляторов при колебательном изменении
входной величины у.
0
y
0
Хп
Хд
0
Хпд
0
1
2
3
4
t
t
t
t
1
2
3
4
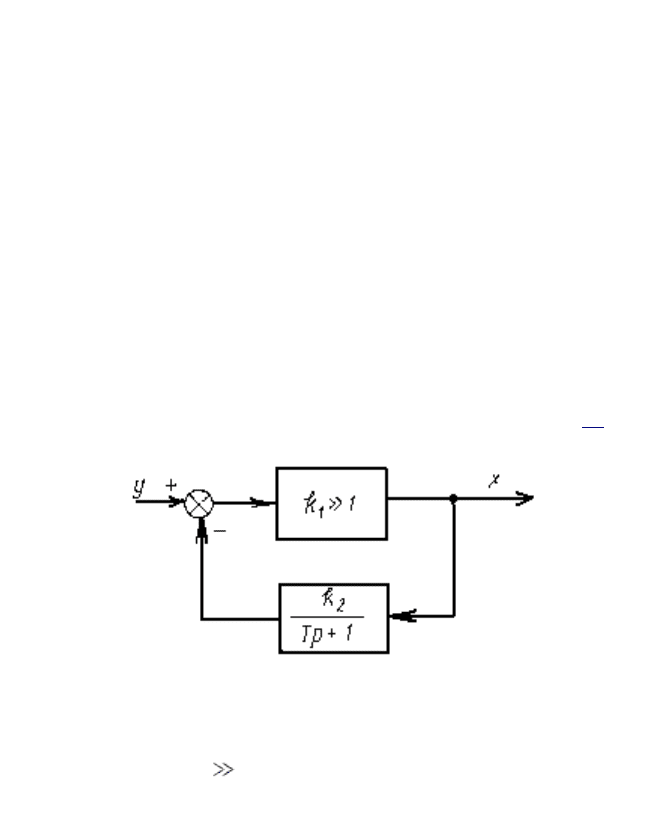
Рис. 3.34. График изменения составляющих Х
П
, Х
Д
и общей
выходной величины Х
ПД
ПД- регулятора при гармоническом
изменении входной величины у
На рисунке показано изменение выходной величины регулятора
во времени под действием только П- составляющей (выходная
величина П- регулятора) Хп и только Д-составляющей Хд.
Отметим, что максимальное отклонение величины Хд наблюдается
при максимальной скорости изменения параметра у. Зависимость Хпд
(выходная величина ПД- регулятора) получена путем
алгебраического сложения ординат кривых Хп и Хд. Из рисунка
видно, что изменение величины Хпд опережает изменение величины
Хд, а следовательно, и изменение параметра у. Это еще раз
подтверждает, что в замкнутом контуре регулирования при
отклонении регулируемой величины от заданного значения ПД-
регулятор вступает в работу раньше, чем П- регулятор.
Структурная схема ПД- регулятора приведена на рис. 3.35.
Рис.3.35. Структурная схема ПД-регулятора
Она состоит из усилительного звена с очень большим коэффи-
циентом передачи (k 1) и апериодического звена 1-го порядка,
установленного в цепи отрицательной обратной связи. Передаточная
функция W(p) такой системы равна [3,6]
1
1
2
1
1
Р
Т
k
k
k
рW
.
Разделив числитель и знаменатель полученного выражения на k
1
и пренебрегая в знаменателе слагаемым 1/k
1
, получим
р
k
Т
k
Т
k
рW
Р
22
2
1
1
1
.
Вводя новые обозначения k
p
=1/k
2
и Тд = Т/k
2
, окончательно
находим
ДРр
ТkрW
. (49)
Законы регулирования в АСР и их настроенные параметры
могут быть определены по следующей формуле [5].
рWр
рW
а
р
0
1
, (50)
где W
Р
(р) - оптимальная передаточная функция регулятора;
- время
чистого (транспортного) запаздывания по каналу регулирования;
0
a
W
(P) – передаточная функция объекта по каналу регулирования
без учета запаздывания.
Опыт показывает, что переходные характеристики
большинства встречающихся на практике промышленных объектов
имеют неколебательный характер. Такие характеристики обычно
хорошо аппроксимируются инерционной системой второго порядка с
запаздыванием [1,3,5]:
,
1
12
22
р
Р
а
а
ТрТ
еК
рW
а
(51)
а в случаях, когда может быть допущена большая динамическая
ошибка регулирования – инерционной системой первого порядка с
запаздыванием
,
1
рТ
еК
рW
Р
а
а
а
(52)
или даже иногда безинерционной системы с запаздыванием
р
аа
а
еКрW
.
(53)
В случае, если динамика объекта описывается уравнением (51),
то в соответствии с (50) получим следующие выражение для
передаточной функции регулятора
аааааа
а
аа
р
КрКр
рТ
Кр
рТ
Кр
рТрТ
рW
1
1
112
22
22
p
р
1
1 Т
Т
К
n
р
,
(54)
где
1
2
2
1
;
T
T
TT
K
T
K
n
aa
p
Анализируя уравнение (54) заключаем, что это уравнение
известного нам ПИД - регулятора, серийно выпускаемого
промышленностью.
Для объектов, описанных уравнением (52), аналогично
получим
аа
р
Кр
рТ
рW
1
р
1
1
n
р
Т
К
,
(55)
где
aa
p
k
T
K
;
TT
n
.
Это уравнение стандартного ПИ-регулятора.
Для объектов, описываемых уравнением (53), получим
уравнение И – регулятора
р
К
рW
и
р
,
(56)
где
aа
и
k
К
1
.
Уравнения (51, 52, 53) описывают динамическое поведение
объектов, обладающих самовыравниванием. Однако на практике
встречаются объекты, не обладающие свойством самовыравнивания.
Динамические свойства таких объектов достаточно хорошо
описываются выражением вида
1
pTp
eK
рW
p
a
a
a
.
(57)
Или даже более простым выражением
p
eK
рW
p
a
a
a
.
(58)
Подстановка выражений (57, 58) в формулу (50) приводит к
двум типовым алгоритмам регуляторов.
ПД – регулятор
рТКрW
рр
1
,
(59)
где
aа
р
k
К
1
;
ТТ
.
П - регулятор
рр
КрW
, (60)
где
aа
р
k
К
1
.

Особенностью ПД и П - регуляторов является то, что они имеют
остаточную неравномерность регулирования.
Величина остаточной неравномерности зависит от нагрузки
объекта, при которой наступило новое установившиеся состояние, а
также от динамических характеристик объекта и настроек регулятора.
Выбор законов регулирования для сложных систем
Каскадные АСР. Выбор законов регулирования в этих системах
осуществляется согласно таблице.
Таблица 3.2
Комбинации законов регулирования главного
(корректирующего) и вспомогательного (стабилизирующего)
регуляторов
Корректирующий регулятор Стабилизирующий регулятор
ПИ
ПИ
ПИД
ПИД
П
ПИ
П
ПИ
Примечание:
1. Если главный регулятор контролирует инерционную
величину, например, температуру или состав, то он должен иметь
ПИД – закон регулирования.
2. Закон регулирования главного регулятора не должен быть
проще закона регулирования вспомогательного регулятора
3. Если от контура вспомогательного регулятора требуется
высокое быстродействие, то для него используют П – закон
регулирования
Комбинированные АСР
Законы регулирования регуляторов в контурах по отклонению
выбираются согласно формуле (50).

Законы регулирования динамических компенсаторов
определяются по формулам (6), (6а) или по таблице 3.1, если
достаточным будет соблюдение условий инвариантности с точностью
до « ».
Взаимосвязанные (автономные) АСР
Законы регулирования регуляторов, контролирующих
регулируемые величины У1 и У2, определяются по формуле (50), а
законы регулирования внешних компенсирующих устройств - по
формулам (29), (30).
АСР с дополнительным импульсом по производной,
импульсные системы и АСР с регулятором Смита
Законы регулирования регуляторов в этих АСР определяются
соответственно формулами (16), (17), (18); формулами-
рT
pR
и
1
-
для импульсных систем и
pRрW
pRр
pW
p
М
М
1
W
- для систем с
регулятором Смита,
где R(p) – передаточная функция регулятора без учета модели объекта
(см. рис.3.28).
Расчет указанных типов АСР удобно проводить на ЭВМ по
методикам, изложенным в [6] и с использованием пакетов
автоматизированного проектирования по курсу ТАУ [4].
Объемы необходимых автоматических защит и технологических
блокировок по п.3.4 определяются спецификой автоматизируемого
объекта и его потенциальной опасностью.
Устанавливаются параметры сигнализации (технологической,
аварийной и др.) защиты и блокировки, параметры для электрических
схем управления.
Схемы и устройства сигнализации, защиты, блокировки и
управления чаще всего выбираются готовыми, реже проектируются