Gubbins D., Herrero-Bervera E. Encyclopedia of Geomagnetism and Paleomagnetism
Подождите немного. Документ загружается.

form. One could in principle “hide” their presence by hypothesizing
equal numbers of magnetic charges of each sign (i.e., equal numbers
of South and North poles that are spatially separated within Earth)
but in the absence of any laboratory evidence, this hypothesis has no
support.
New physical theories associated with rotation
Since Earth’s dipole is approximately aligned with the rotation axis, it
is natural to think of some (unspecified) physical process that creates a
magnetic dipole aligned with the angular momentum vector for any
rotating body. This is in the sprit of the previously mentioned gyro-
magnetic effect, except that it would be different physics (i.e., would
exist even for a nonmagnetic material) and would be important only
for very large accumulations of material. One could hypothesize, for
example, that M/J
n
, where M is the magnetic moment, J is the angu-
lar momentum, and n is some exponent. This proposed proportionality
has become known as the Magnetic Bode’s law (in very crude analogy
with the Titus-Bode geometric progression of planetary orbital spa-
cings), except that the label is now more often used to describe some
poorly understood scaling for the dynamo process rather than hypothe-
sized new physics. (Note that the original “Bode’s law” is not in fact a
physical law.).
The basic idea that there is some universal linear relationship
between angular momentum and magnetic moment sufficient to
explain Earth’s magnetic field was disproved in the laboratory by
Blackett during his development of highly sensitive magnetometers
in the 1950s. The strictly empirical claimed proportionality observed
when one plots M and J for planets on a log-log plot (magnetic Bodes
law) deserves to be in ill repute because it covers many orders of mag-
nitude and most of the range is explained by the fact that dipole
moments scale as planet radius cubed, while angular momenta scale
as planet radius to the fifth power. (The other parameters in this
hypothesized relationship vary by smaller amounts.) The magnetic
Bodes “law” can be used as a pedagogical example of how to mislead
oneself and others by plotting two quantities that have an underlying
common factor and thereby falsely concluding a relationship.
Summary
Table N2 summarizes nondynamo theories, their basis (or otherwise)
in fundamental physics, and their possible significance and magnitude.
With the exception of permanent magnetism, these proposals are
either real effects that are too small (usually by many orders of magni-
tude) or effects that have no established reality. The bibliography
includes reference to two papers on the planet Mercury, which illustrate
the extent to which alternatives can continue to have some credibility in
an instance where the field is much smaller than Earth and the data are
limited.
David J. Stevenson
Bibliography
Aharonson, O., Zuber, M.T., and Solomon, S.C., 2004. Crustal rema-
nence in an internally magnetized nonuniform shell: a possible
source for Mercury’s magnetic field? Earth and Planetary Science
Letters, 218: 261–268.
Barnett, S.J., 1933. Gyromagnetic effects: history, theory, and experi-
ments. Physica, 13: 241.
Elsasser, W.M., 1939. On the origin of the Earth’s magnetic field.
Physical Review, 55: 489.
Inglis, D.R., 1955. Theories of the Earth’s magnetism. Review of
Modern Physics, 27: 212.
Merrill, R.T., McElhinney, M.W., and McFadden, P.L., 1996. The
Magnetic Field of the Earth. New York: Academic Press, 531 pp.
Parker, E.N., 1979. Cosmical Magnetic Fields: Their Origin and Their
Activity. Oxford: Clarendon Press; New York: Oxford University
Press, 841 pp.
Poirier, J-P., 1991. Introduction to the Physics of the Earth’s Interior.
New York: Cambr idge University Press, p. 191.
Roberts, P.H., and Glatzmaier, G.A., 2000. Geodynamo theory and
simulations. Review of Modern Physics , 72: 1081–1123.
Russell, C.T., 1993. Magnetic fields of the terrestrial Planets. Journal
of Geophysical Research-Planets, 98: 18681–18695.
Stevenson, D.J., 1974. Planetary magnetism. Icarus, 22: 403–415.
Stevenson, D.J., 1983. Planetary magnetic fields. Reports on Progress
in Physics, 46: 555–620.
Stevenson, D.J., 1987. Mercury’s magnetic field—a thermoelectric
dynamo? Earth and Planetary Science Letters, 82:114–120.
Cross-references
Dynamos, Planetary and Satellite
Table N2 Nondynamo theories
Mechanism Physical basis Significance and possible magnitude
Primordial Finite decay time of currents Decay time is too short compared to
age of the Earth
Unexpected (noncrustal) ferromagnetism
permanent magnetism
No suitable candidate minerals exists
Gyromagnetism Dipole associated with a rotating ferromagnet Too small by at least 10
10
Thermoelectric effect Differences in temperature and composition Field too small and wrong geometry
Thermomagnetic effect Currents arising in presence of thermal gradients
and magnetic field
Amplification too small; no
regeneration of field
Hall effect Additional current in presence of magnetic field Small change in existing field
Rotating electric fields Current arising from rotating charged capacitor Requires impossibly large charge or
electric fields
Compression effect Gravity acts differently on electrons and massive
nuclei
Too small by 10
10
Magnetic monopoles Permitted in some fundamental particle physics
theories
Not observed
Magnetic “Bodes law” hypothesized
fundamental connection between
magnetic moment and angular
momentum
No observational or theoretical basis
706 NONDYNAMO THEORIES

NORMAN, ROBERT (FLOURISHED 1560–1585)
Nothing is known of the birth and death dates, parentage, or precise
marital status of Robert Norman. All that we have to go on, from infor-
mation contained in his two published works and a few other scattered
fragments, is that he served at sea for 18 or 20 years before settling in
the seafaring district of Ratcliff, on the north bank of the Thames,
London, as a maker of navigational instruments, and in particular of
marine compasses. It was to be in this latter profession that he won both
a contemporary and an enduring fame in the history of geomagnetism.
In The Newe Attractive (London, 1581), Norman published the first
serious study of the magnetic dip. For while the dip had been dis-
covered by the German Georg Hartmann around 1544, Hartmann
had only communicated his discovery in a private letter that was
not to become known to the wider world until 1831, so that Robert
Norman’s discovery, announced in print in 1581, can be rightly
credited as independent and original.
Although a working instrument maker, Norman clearly possessed
all the right instincts for an original research scientist. He made a
long-standing study of the behavior of the compass, and found that
to make a ship’s compass needle lie properly flat on its suspension
pin in London, he had to weight the south end of the needle, for it
invariably dipped down to the north. A small blob of wax was used
to act as the counter weight. Trials and experiments led him to realize
that, in London, the magnetic needle dips at an angle of 71
50
0
. This
prompted him to next investigate how the needle behaved elsewhere,
which in turn brought him to the understanding that the Earth’s mag-
netic field seemed to act in more than just the horizontal plane.
Norman realized that knowledge of the magnetic dip, when used in
conjunction with the position of the usual horizontal compass needle,
could be of great benefit to position-finding at sea. For if navigators
and researchers could build up a detailed knowledge of the position
of the horizontal and dip needles for different parts of the globe, then
a sailor could derive a better knowledge of his position. (A similar
logic was to lie behind William Gilbert’s practical uses of magnetism
and Edmond Halley’s magnetic surveys of the Atlantic, over a century
later.) Unlike Gilbert, however, Norman never developed a coherent
theory about what magnetism was or how it occurred.
Robert Norman belonged to a class of men who were coming to
play an increasingly significant role in the wider rise of science, espe-
cially in England: intelligent, ingenious craftsmen, sailors, and experi-
enced travelers, who while not “learned” in the sense of having
received a Latinate classical education, were to approach the study
of natural phenomena from a refreshing and original angle. Unfettered
as they were by classical cautions about the unreliability of sense-
knowledge, and outside the linguistic and philosophical games of the
European universities, they formed that cadre of men whose praises
were soon to be sung by Dr. William Gilbert, Sir Francis Bacon, and
the early fellows of the Royal Society. It would be wrong, however,
to see Norman, and enterprising men like him, as simple tradesmen
who were fond of writing. For, although not classically educated,
Norman seems to have had a good reading and even a translating
knowledge of Dutch, and was encouraged in his magnetical researches
by none other than William Borough, himself a student of magnetism
and comptroller of the Royal Navy, to whom The Newe Attractive
was dedicated. It is perhaps more appropriate to see Norman as a
successful entrepreneur who financed his scientific researches on the
strength of a successful business: a pattern that would be very common
in British science down to the late 19th century.
Geomagnetism, moreover, was in many ways a more challenging
field of research for such men to become occupied with, for while
mathematical-scale graduators and cross-staff makers became involved
in astronomy and oceanography, the study of magnetism was more
innately mysterious. This meant that it was much more “philosophi-
cal,” or what we would call research-physics-based, in so far that
it—like optics—involved wrestling with and discovering the mathe-
matical behavior of invisible and seemingly intangible natural forces.
Indeed, the essentially practical nature of physics research as con-
ducted by men such as Norman, he explicitly contrasted with the
approach of “learned” scholars, who preferred to remain in their stu-
dies and find answers to all things within their books. What is more,
Norman, like contemporary navigation writers such as Edward Wright,
was a pioneer of the English language as a medium of scientific and
technical discourse. His The Safegarde of Saylers, or, Great Rutter
(1584, 1590) used contemporary material, which Normon had translated
from Dutch vernacular navigation manuals, often called “Rutters” (or
Routers), and was, in fact, part of a vernacular technical and naviga-
tion book movement that included not only Dutch and English, but
also French, Spanish, and Italian materials. Indeed, all the great sea
powers of the age produced vernacular authors who wrote instruction
books and tables for their non-Latinate sea captains who now faced,
as a matter of course, long-haul oceanic voyages.
And what began as vernacular books for sailors became increasingly
the norm for learned scientists by the 17th century, and by the 1660s
the Royal Society and the French Académie regarded it as normal to
publish the researches in their mother tongue. In this way, therefore,
Norman and his magnetic researches played a role in the growth of
a new intellectual tradition. Norman’s published work also helped
to stimulate wider English researches into geomagnetism. Edmund
Gunter, Henry Gellibrand, and those early Gresham College, London,
professors who began to monitor the westward drift of the compass vari-
ation at Limehouse between 1622 and 1634 (in the wake of William
Borough’s work in the same place 50 years earlier), learned men as they
were, took at least part of their queue from Norman’s example.
Norman’s instruments were clearly prized, for Dr. Christopher
Merret, an early fellow of the Royal Society, recorded taking one of
Norman’s “Clinatories” or dip-needles for repair by Henry Bond
nearly a century after it had been made.
It is sad that the wider details of the life of a figure of such impor-
tance as Robert Norman in the early history of geomagnetism should
have been lost.
Allan Chapman
Bibliography
Bennett, J.A., 2004. Robert Norman. New DNB. Oxford: Oxford
University Press.
Chapman, A., 1998. Gresham College: Scientific instruments and the
advancement of useful knowledge in seventeenth-century England.
Bulletin of the Scientific Instrument Society, 56:6–13.
Norman, R., 1581. The Newe Attractive. London.
Taylor, E.G.R., (1954, 1968). The Mathematical Practitioners of
Tudor and Stuart England 1485–1714. London: Cambridge
University Press, p. 173 no. 29.
NORMAN, ROBERT (FLOURISHED 1560–1585) 707
O
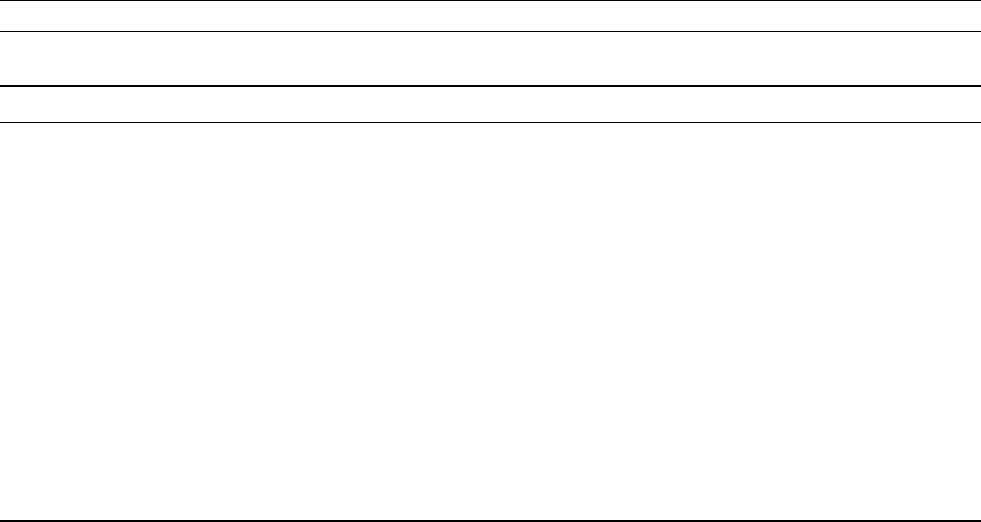
OBSERVATORIES, OVERVIEW
Geomagnetic observatories carry out continuous and accurate monitor-
ing of the strength and direction of the Earth’s magnetic field over many
years, making measurements at least every minute. Observatory data
reveal how the field is changing on a wide range of timescales from sec-
onds to centuries, and this is important for understanding processes both
inside and outside the Earth. It is estimated that there are approximately
180 observatories currently operating around the world (Figure O1) (for
more information on observatories in particular countries or regions of
the world see Observatories in ... and Figure O2/Plate 3). The distribu-
tion of observatories is largely determined by the location of habitable
land and by the availability of local expertise, funds, and energy supply,
and as result, it is uneven and a little sparse in some regions. Many obser-
vatories have had to move because of encroaching urbanization. How-
ever, the continuity of their data series is generally maintained by
simultaneous observations at the old site and new site over a period of
time to allow site differences to be established.
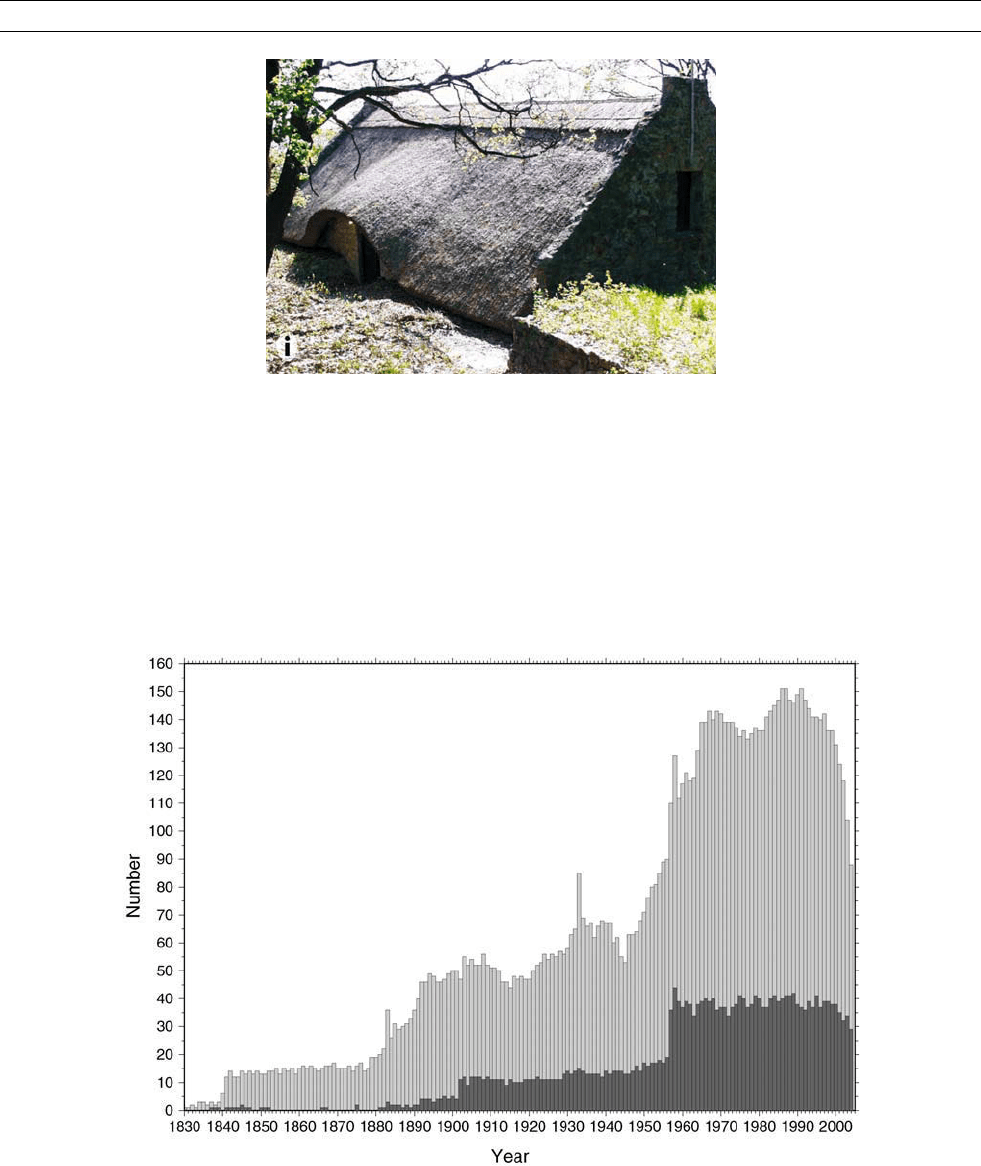
The distribution of data in time is shown in Figure O3. Interna-
tional scientific campaigns such as the first International Polar Year
in 1882/1883, the second International Polar Year in 1932/1933, and
the International Geophysical Year in 1957/1958 encouraged the opening
of many observatories around the world. Geomagnetism is a cross-
disciplinary science, and as a result, observatories are run by a wide vari-
ety of institutes whose interests range from geology, mapping, geophysics
(including seismology and earthquake prediction), meteorology to solar-
terrestrial physics, and astronomy.
There are two main categories of instruments at an observatory. The
first category comprises variometers that make continuous measure-
ments of elements of the geomagnetic field vector but in arbitrary
units, for example millimeters of photographic paper in the case of
photographic systems or electrical voltage in the case of fluxgates
(see Observatories, instrumentation and Observatories, automation).
Both analog and digital variometers require temperature-controlled
environments and installation on extremely stable platforms (though
some modern systems are suspended and therefore compensate for
platform tilt). Even with these precautions they can still be subject to
drift. They operate with minimal manual intervention but the resulting
data are not absolute.
The second category comprises absolute instruments that can make
measurements of the magnetic field in terms of absolute physical basic
Figure O1 Locations of currently operating observatories.
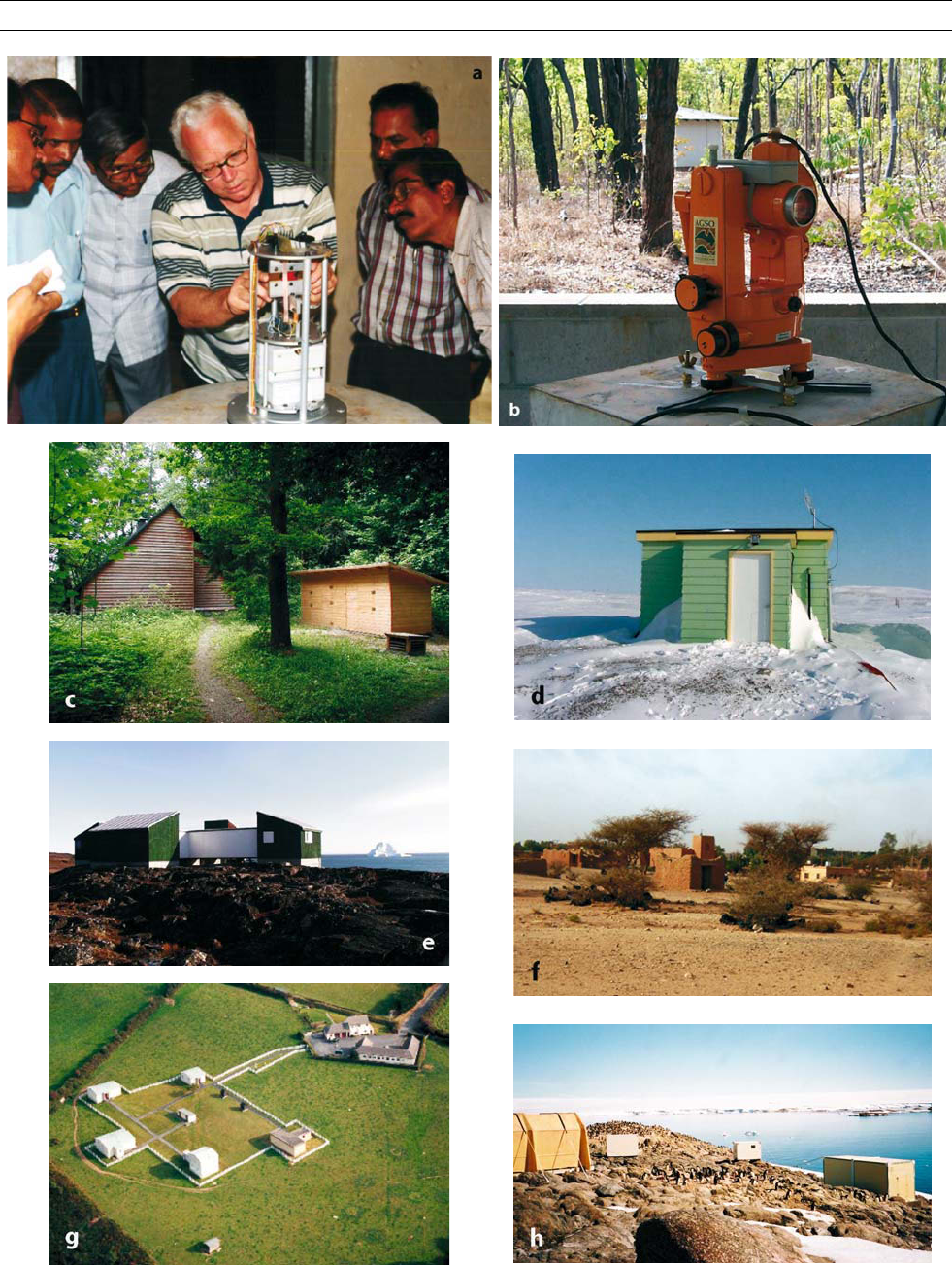
Figure O2/Plate 3 Continued
OBSERVATORIES, OVERVIEW 709
units or universal physical constants. The most common types of abso-
lute instrument are the fluxgate theodolite for measuring declination
and inclination and the proton precession magnetometer for measuring
total intensity. In the former the basic unit is an angle. The fluxgate
sensor mounted on the telescope of a non-magnetic theodolite is used
to detect when it is perpendicular to the magnetic field vector. True
north is determined by reference to a fixed mark of known azimuth.
This can be determined astronomically or by using a gyro attachment.
In a proton precession magnetometer, the universal physical constant
is the gyromagnetic ratio of the proton and the basic unit is time (fre-
quency). Measurements with a fluxgate theodolite can only be made
manually while a proton magnetometer can operate automatically.
Final observatory data are produced by adjusting the variometer
data by application of a baseline, so that they closely fit the absolute
data. In this process any long-term drifts or steps in the variometer data
and differences between the sites of the variometers and absolute
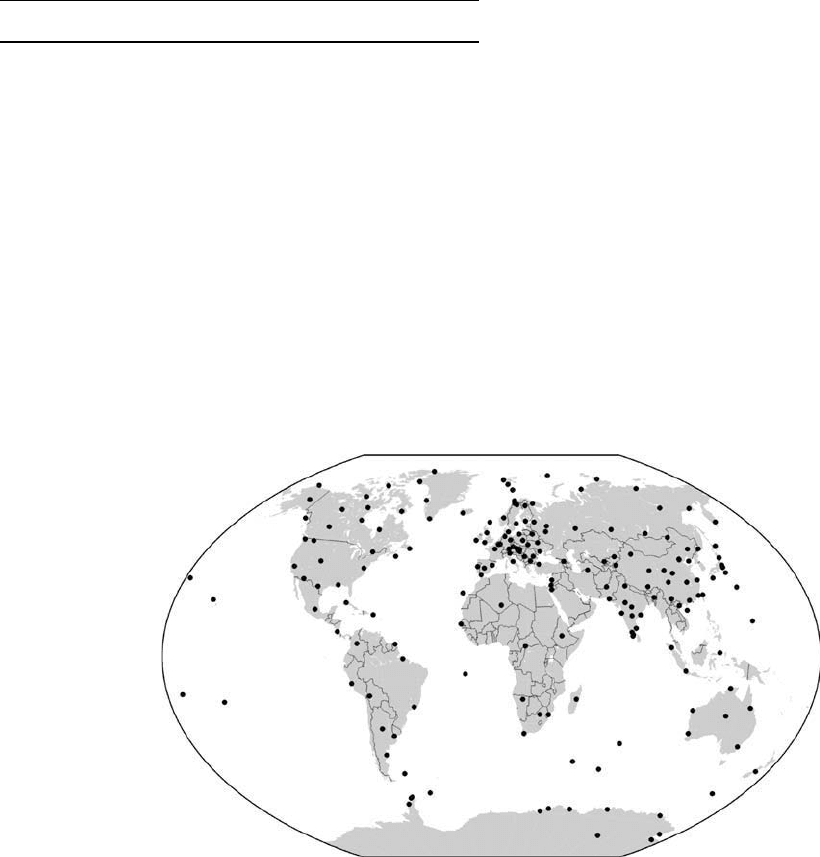
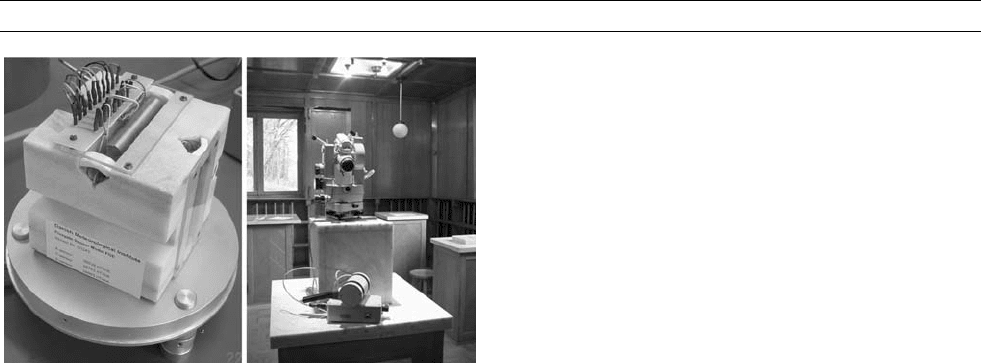
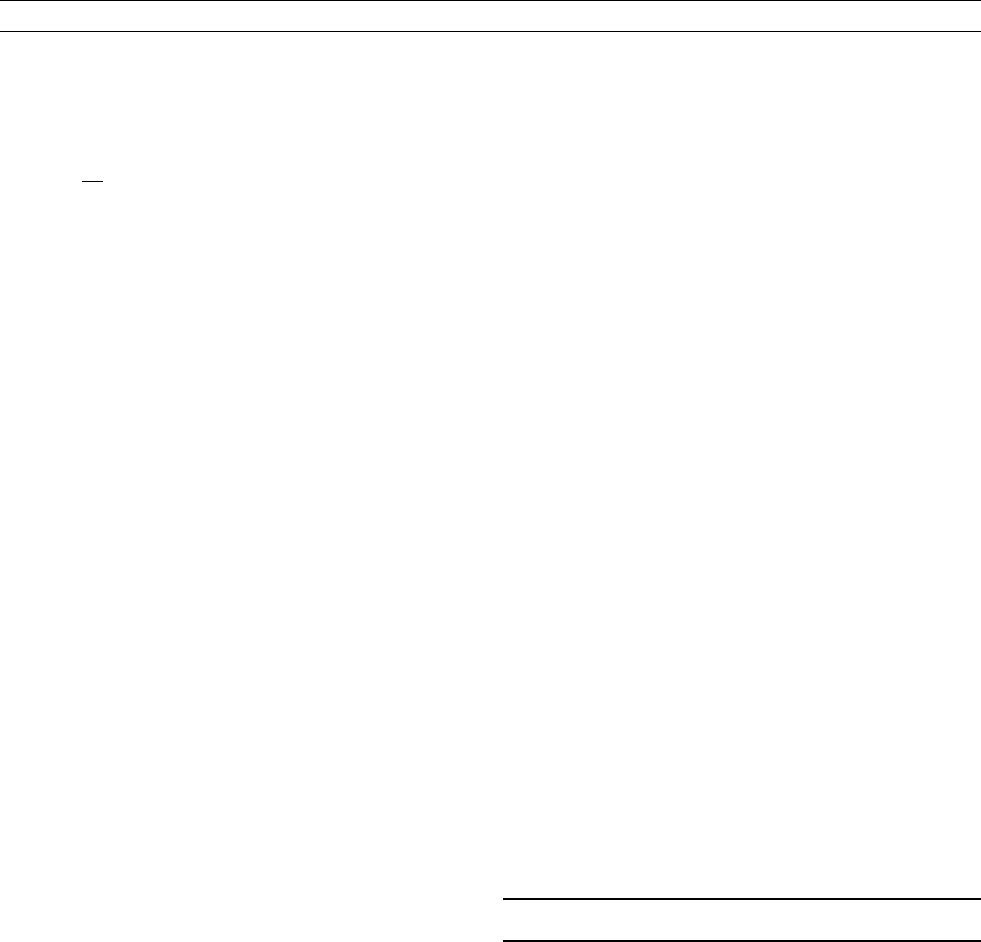
Figure O2/Plate 3 The Danish Meteorological Institute suspended triaxial fluxgate magnetometer being adjusted at Alibag
observatory in India (a). This variometer can measure the magnetic field variations along the axes of three orthogonal sensors every
second. Another instrument also run in continuous mode at observatories is a proton precession magnetometer. It is an absolute
instrument and measures the strength of the magnetic field. In order to convert the variometer data into absolute data, manual
observations are necessary. For this a fluxgate theodolite, or DI-flux, is widely used. (b) Shows the fluxgate theodolite at Kakadu
observatory in Australia. The fluxgate sensor is fixed to the telescope of the non-magnetic theodolite and is used to indicate when its axis
is orthogonal to the magnetic field, and therefore the orientation of the field (see Observatories, instrumentation and Observatories,
overview). (c) Fu
¨
rstenfeldbruck observatory, Germany; (d) Resolute observatory, Canada; (e) Qeqertarsuaq (Godhavn) observatory,
Greenland; (f) Tamanrasset observatory, Algeria; (g) Hartland observatory, UK; (h) Dumont D’Urville observatory, Antarctica; (i) Tihany
observatory, Hungary. These buildings, some in the vernacular style, are made of non-magnetic material and can be maintained at stable
temperatures if housing variometers.
Figure O3 Number of observatory annual means per year in the Northern (grey) and Southern (black) Hemispheres.
710 OBSERVATORIES, OVERVIEW

instruments are effectively removed. Various other instrument effects
may also be included in the baselines. These are scaling factors, offsets,
sensor alignments, temperature responses, and timing errors. Many of
these effects are insignificant with modern digital variometers. If there
is a backup variometer, ideally housed in a different building on
the observatory site, filling of gaps resulting from human-made noise
and data loss may also be possible. Once a continuous clean time series
of data reduced to the observatory reference location is obtained, final
observatory products are produced and disseminated. These include
1-min means, hourly means, annual means, and K-indices.
There have been many efforts to standardize the operation of mag-
netic observatories and to expand the network. Current international
efforts include the IAGA Observatory Workshops and INTERMAG-
NET but there are also many efforts made by individual institutes
(see Observatories in ...). The International Association of Geomag-
netism and Aeronomy (see IAGA, International Association of Geo-
magnetism and Aeronomy) runs workshops every 2 years where
information is exchanged on observatory practice and instrumentation.
IAGA has also published a guide to observatory practice (Jankowski
and Sucksdorff, 1996). Since the late 1980s INTERMAGNET (Inter-
national Real-time Magnetic observatory Network) has contributed to
the establishment of global standards in the measurement, recording
and dissemination of digital geomagnetic data (see Observatories,
INTERMAGNET ). There are now about 100 observatories operating
to INTERMAGNET standards.
The satellite magnetic survey missions of the International Decade
of Geopotential Research, which started with the launch of the Ørsted
satellite in 1999 (see Ørsted and CHAMP), along with increased
appreciation of the effects of space weather on technological systems
during magnetic storms (see Geomagnetic hazards) has fueled recent
interest in geomagnetic observatory data. The many programs to
replace analog systems with digital systems will also increase the uti-
lity of observatory data. The future for geomagnetic observatories is
hopefully a bright one.
Susan Macmillan
Bibliography
Jankowski, J., and Sucksdorff, C., 1996. IAGA Guide for Magnetic
Measurements and Observatory Practice. International Association
of Geomagnetism and Aeronomy.
Cross-references
CHAMP
Geomagnetic Hazards
IAGA, International Association of Geomagnetism and Aeronomy
Observatories, Automation
Observatories in ...
Observatories, Instrumentation
Observatories, INTERMAGENT
Observatories Program in ...
Ørsted
OBSERVATORIES, INSTRUMENTATION
Introduction
The main task of a geomagnetic observatory is to observe the natural
geomagnetic field for an extended period of time (at least 1 year) by
performing continuous measurements of the three-dimensional geo-
magnetic vector. Observatory instrumentation is responsible for this
measurement task. As we are dealing with a very wide-frequency spec-
trum of signals, whose characteristic times extend from centuries to
subsecond intervals (see Geomagnetic spectrum, temporal), issues of
long-term instrument reliability, standardization of the instrumenta-
tion, continuity in data formats, as well as fast sampling capability
are to be considered carefully. As only the natural geomagnetic field
is of interest here, observatory instrumentation should be completely
nonmagnetic: it should not modify the direction or amplitude of the
geomagnetic vector in a measurable way. If, however, the sensors are
magnetic, or produce magnetic fields for the sake of the measurement
procedure, it must be ensured that those effects are eliminated by
the measurement protocol and that no perturbation on neighboring
instruments arises.
For the instrumentation to perform successfully, the observatory
must answer to strict magnetic conditions: low magnetic gradient
and identity of field changes over the area. Moreover, one is led to
consider the whole observatory site as part of the observatory instru-
mentation; hence the quality of measurement depends on the magnetic
hygiene of the surroundings and the buildings, on low magnetic noise
conditions, as well as on the stability of the pillars bearing the field
orientation sensors. Detailed information about geomagnetic instru-
mentation in observatories can be found in Jankowski and Sucksdorff,
1996.
Short history
The first magnetic observatory instrument—the magnetic compass—
was discovered in China already before the year
A.D. 1000. Early
observatories—starting in the 16th century—used an oversize com-
pass needle so as to ensure sufficient resolution on the declination
angle. The compass was later complemented by the dip circle for mea-
suring the magnetic inclination. Still later, projected field components
would be measured by using setups with current-carrying coils and
calibrated magnets. A (virtual) visit to the Museum of the History
of Science in Florence will allow you to see those early instruments.
Continuous observations were performed by an observer making a
reading every 2 h or so and writing the values down in a notebook.
The photographic paper recorder appeared in the 19th century, allow-
ing uninterrupted graphical registration of the field. The invention of
the fluxgate in the early 1900s permitted the development of the triax-
ial electronic variometer and the DI-flux, which are in use today in
most magnetic observatories. The introduction of the proton preces-
sion magnetometer (Packard and Varian, 1954) allowed an important
operational simplification and improvement in the measurement accu-
racy of the magnetic induction (see Instrumentation, history of ).
Geomagnetic metrology
To completely describe the geomagnetic vector, each measurement
must sample three independent vector components. The three most
popular coordinate systems for describing the geomagnetic vector are:
Cartesian: X (North component), Y (East component), Z (vertical
component, positive downward).
Cylindrical: D (magnetic declination angle, positive East), H (hori-
zontal component).
CRLF: Z Spherical: D, I (magnetic inclination angle, positive down-
ward), F (magnetic field induction intensity).
Component magnetometers will measure projections of the vector
with a large constant part, like X and Z, while orientation magnet-
ometers will be sensitive to the orientation of the field with respect
to the sensor and measure small projections like D or Y. Component
and orientation magnetometers are not yet capable of continuously
measuring all the field components with the required absolute accu-
racy. Therefore, an observatory measurement setup uses:
a variometer to measure the variation of the field components
about baseline values in a continuous and unattended way at the
required sampling rate, say 1 Hz and
absolute measurements performed regularly (say 2 per week) by an
observer with the adequate instrumentation (DI-flux, proton mag-
netometer; see Figure O4) to establish the values of the baselines.
OBSERVATORIES, INSTRUMENTATION 711
This makes the observatory measurement essentially a two-step pro-
cess, where the second part is performed manually. Postprocessing
merges the two data sets to produce a final data record having the
accuracy of the absolute instruments at the variometer’s sampling rate.
The expression “absolute measurement” means here that the observa-
tions must be fully traceable to metrological standards for the magnetic
induction and that the orientation of the geomagnetic vector is mea-
sured with respect to the local vertical and to geographic north.
It is expected that in the future fully automatic observatories will be
available (see Observatories, automation) where the absolute measure-
ment part will be also unattended. Observers are striving to make abso-
lute measurements with an accuracy of 0.1 nT for inductions and 1 s of
arc for orientation. The INTERMAGNET consortium (see Observa-
tories, INTERMAGNET) has laid down observatory instrumentation
specifications for its members. This conveniently provides guidelines
for observatories wishing to upgrade their instrumentation.
In less-modern observatories, variometers consist of suspended
magnets and magnetic balances (Wienert, 1970). The continuous
record of the field’s components is recorded as curves on a piece of
photographic paper, the magnetogram. Elongated axial magnets, sus-
pended so as to rotate freely around the vertical, will orient their mag-
netic axis along the geomagnetic meridian, and will thus indicate its
direction, providing a declination variometer. If an auxiliary stationary
magnet creates a bias field so as to position the suspended magnet with
its magnetic axis east-west, the suspended magnet’s motion will follow
the changes in the horizontal component, allowing it to be recorded.
Magnetic balances compare the torque exerted by the vertical compo-
nent on a magnet with the one exerted by gravity on a constant mass
using a knife-edge balance. In all cases, the recording of the magnet’s
motion is ensured by a light beam falling on a mirror at the magnet’s
extremity. The horizontal beam, deflected by this mirror, will impress a
time-dependent curve on a vertically streaming photographic paper.
The streaming speed is usually about 20 mm h
1
, but for rapid run
magnetographs it may go up to 200 mm h
1
.
In modern observatories, the most popular magnetometers are based
on the proton precession effect and the fluxgate sensor. In former
Soviet bloc countries, the Bobrov magnetometer, which consists of a
magnet suspended by a taut quartz fiber, is successfully used in its
servo version, where the magnet’s orientation is kept fixed by the
action of a coil. The coil current is easily fed to a digital data acquisi-
tion system to produce computer readable files.
The proton precession magnetometer
It is used in observatories for measuring the magnetic induction B in
the range of 10–100 mT with accuracy down to 0.1 nT. Here the free
precession frequency f of protons is the observable and the formula
2pf ¼ g
0
p
B (Eq. 1)
allows the measurement of the magnetic induction by way of the mea-
surement of a frequency. The standard for the magnetic induction is
thus conveniently converted to a frequency standard, which is widely
available. The quantity g
0
p
is the proton gyromagnetic ratio at low field
for a spherical H
2
O sample at 25
C. The recommended value given by
CODATA and adopted by IAGA in 1992 is (Cohen and Taylor, 1987)
g
0
p
¼ 2:67515255T
1
s
1
(Eq. 2)
The sensor consists of a bottle containing the proton-rich fluid and is
surrounded by a coil, serving the dual purpose of applying periodically
a polarizing field to the liquid and picking up the signal from the pre-
cessing protons after cutting off the polarizing field. An electronic con-
sole will amplify the precession signal and perform a frequency
measurement of it with the required accuracy. This measurement is
then scaled using g
0
p
to give the field induction intensity in teslas.
This quite remarkable instrument is one of the few sensors able to
measure directly the modulus of a vector without using computation
from components or performing a leveling or tedious orientation pro-
cedure. This is of course due to the fact that the free protons have only
the ambient magnetic field to orient themselves.
Modern proton magnetometers can be quite compact and have high
resolution and sampling rate (0.01 nT and 3 Hz are typical). The Over-
hauser types (Sapunov et al., 2001) in particular are responsible for
this progress and have the additional benefit of low power operation.
They are therefore a first choice in modern observatories instrumenta-
tion, providing automatic and continuous observation of the geomag-
netic induction field intensity.
The optically pumped magnetometer
Optically pumped magnetometers (OPM) are based on the splitting of
the energy levels of some alkali metal and helium atoms in a magnetic
field. The optical pumping scheme allows measuring this energy split-
ting with very high resolution (Alexandrov and Bonch-Bruevich,
1992).
OPMs have been used at magnetic observatories, both for total field
modulus measurement and, when complemented by a set of bias coils,
for observing the geomagnetic field direction changes. One of the first
digital observatories was based on a rubidium OPM (Alldredge and
Saldukas, 1964).
Like proton magnetometers, the OPMs are scalar magnetometers
but, to the contrary of the proton magnetometer, deliver a continuous
stream of data, in the form of a frequency modulated by the value of
the field. This frequency, with name of Zeeman, is linked to the mea-
sured magnetic induction by the Breit-Rabi polynomial formula. In a
few cases, when the Zeeman peaks corresponding to the different
energy-splits in the atoms are resolved, the polynomial coefficients
can be calculated from fundamental physical constants, and the OPM
has then absolute accuracy. This is the case of the OPMs based on
potassium,
3
He, and
4
He vapor (Alexandrov and Bonch-Bruevich,
1992; Gilles et al., 2001).
OPMs have a high sensitivity with some approaching the 0.1 pT
Hz
1/2
noise level. This performance makes them attractive for pro-
spection work, aeromagnetic survey, space-based observations, and
field stabilizers. However their high initial and maintenance cost due
to the short lifetime of the gas-discharge pumping lamp has limited
their use in the observatory. It looks like this deficiency will be over-
come in the future in view of quick progress in laser-pumping lamps
(Gilles et al., 2001).
Figure O4 Instrumentation as used in most magnetic
observatories of the world. The left panel represents a triaxial
fluxgate variometer sensor. Right panel: the DI-flux magnetometer
mounted on top of the pillar consists of a nonmagnetic theodolite
with a fluxgate sensor on its telescope. In the foreground, an
Overhauser proton magnetometer consisting of the cylindrical
sensor and the electronic console.
712 OBSERVATORIES, INSTRUMENTATION
Induction coil magnetometer
The induction coil (or search-coil) magnetometer’s (ICM) operation
principle is based on the Maxwell equation which can be written in
integral form as
e ¼
dF
dt
;
where e is the electromotive force (emf ), F is the magnetic flux, and
t is the time. In its simplest form an ICM contains a coil with many
turns of copper wire connected to the input of a voltage amplifier.
As it is seen from the equation, an ICM can be used only for the mea-
surement of a time-varying magnetic flux. Its component collinear to the
coil’s axis intercepts the coil loops and generates an emf at the coil’s
terminals, which is further amplified to an easily measurable level.
To increase the ICM sensitivity, a high permeability ferromagnetic
material is used as a core inside the multiturn winding. Due to their
relative simplicity, ICMs are widely used for many applications,
mainly in geophysics. In geomagnetic observatories they are used for
the study of Earth’s magnetic field pulsations.
Their operational frequency band covers from about 10
–4
till 10
þ7
Hz and the measurement dynamic range covers the range from frac-
tions of femtotesla till tens of tesla. In spite of an apparent simplicity,
the creation of a high-class ICM needs complicated calculations to
establish an optimal matching of the sensor coil with the amplifier
(Korepanov et al., 2001).
The fluxgate magnetometer
This instrument is used for measuring the component of the magnetic
field vector along its sensor’s axis. The fluxgate principle uses the
nonlinear field/induction relationship of an easily saturable ferromag-
netic core. The core, usually a rod or a ring, is subjected to both the
DC field to be measured, and an auxiliary AC field produced by a coil
and an electronic oscillator. This offset sinusoidal excitation will create
a distorted AC signal, in a pick-up coil surrounding the core. The
detection of its even harmonics provides a DC signal proportional to
the field to be measured.
Fluxgate sensors work best in small axial fields, therefore they are
often operated within a third current-carrying coil, which cancels off
the main part of the DC field. This main part may be calculated by a
servo scheme, or be constant. Otherwise, the fluxgate sensor is oper-
ated with the field essentially normal to the sensor, resulting in a small
field component along the core axis. The fluxgate will then be sensi-
tive to its orientation to the field.
Observatory fluxgate variometers will include three fluxgate sensors
arranged orthogonally on a stable support made of marble or quartz.
This trihedron is then oriented by the variometer frame according to
the three components set one wishes to observe (see Figure O4).
Absolute meas urements of declination and inclination
Measuring the orientation of the geomagnetic vector with respect to a
coordinate frame pointing to the geographic north and to the local ver-
tical represents a metrological challenge, especially if one wishes to
attain 1
00
direction accuracy on this fluctuating vector. In fact, several
measurements are taken so as to correct for systematic instrumental
defects. Therefore the variometer of the observatory is used for taking
into account any field changes during the measurement procedure.
The state of the instrumentation art is now provided by a device called
“DI-flux” or “DIM,” which is assembled from a nonmagnetic theodo-
lite and a fluxgate sensor mounted on the telescope. The magnetic axis
of the fluxgate should be nearly parallel to the optical axis of the tele-
scope (see Figure O4). With a DI-flux so configured, a measurement
protocol suggested by Lauridsen (1985) allows the error-free determi-
nation of D and I.
Jean L. Rasson
Bibliography
Alexandrov, E.B., and Bonch-Bruevich, V.A., 1992. Optically pumped
magnetometers after three decades. Optical Engineering, 31:
711–717.
Alldredge, L.R., and Saldukas, I., 1964. An automatic standard
magnetic observatory. Journal of Geophysical Research, 69:
1963–1970.
Cohen, E.R., and Taylor, B.N., 1987. The 1986. CODATA recom-
mended values of the fundamental physical constants. Journal of
Research of the National Bureau of Standards (U.S.) , 92:85–95.
Gilles, H., Hamel, J., and Chéron, B., 2001. Laser pumped
4
He mag-
netometer. Review of Scientific Instruments, 72: 2253–2260.
Jankowski, J., and Sucksdorff, C., 1996. Guide for Magnetic Measure-
ments and Observatory Practice. Boulder: International Associa-
tion of Geomagnetism and Aeronomy.
Korepanov, V., Berkman, R., Rakhlin, L., Klymovych, Ye., Pristai, A.,
Marussenkov, A., and Afanassenko, M., 2001. Advanced field
magnetometers comparative study. Measurement, 29: 137–146.
Lauridsen, K.E., 1985. Experiences with the DI-fluxgate magnet-
ometer inclusive theory of the instrument and comparison with
other methods. Danish Meteorological Institute Geophysical
Papers, R-71.
Packard, M., and Varian, R., 1954. Free nuclear induction in the
Earth’s magnetic field (abstract only). Physical Review, 93: 941.
Sapunov, V., Denisov, A., Denisova, O., and Saveliev, D., 2001. Pro-
ton and Overhauser magnetometers metrology. Contributions to
Geophysics & Geodesy, 31:119–124.
Wienert, K.A., 1970. Notes on Geomagnetic Observatory and Survey
Practice. Brussels: UNESCO.
Cross-references
Compass
Gauss’ Determination of Absolute Intensity
Geomagnetic Spectrum, Temporal
Instrumentation, History of
Magnetometers, Laboratory
Observatories, Automation
Observatories, INTERMAGNET
OBSERVATORIES, AUTOMATION
In 1847 magnetic recording by photography was introduced at the
Royal Observatory at Greenwich. This early example of observatory
automation was prompted by the difficulty and expense of maintaining
a schedule of hourly observations coupled with the scientific desire to
see a fuller spectrum of magnetic variations. Economics is a major fac-
tor behind the present-day move to automate as many observatory
operations as possible. If Canada, for example, were to place a full-
time observer at each of its 13 observatories, the cost of operating
the network would roughly double. Fully automated observatories
can be deployed in remote locations where staff is unavailable, includ-
ing the ocean bottom. Automation is also a natural consequence of the
necessity for observatories to meet the present-day scientific require-
ments for digital data. Digital magnetometer systems naturally lend
themselves to automation.
All aspects of observatory operations are subject to full or partial
automation: (1) data collection, (2) data telemetry, (3) data processing,
(4) data dissemination, (5) error detection, and (6) absolute observa-
tions. The natural end point of the automation process is an automatic
magnetic observatory (AMO). Not all aspects of observatory opera-
tions need to be completely automated for the observatory to be con-
sidered an AMO. However, (1), (2), and (6) must be fully automated
and (3), (4), and (5) must be at least partially automated. Although
OBSERVATORIES, AUTOMATION 713

several systems previously or currently in use have been called
“automatic observatories” none truly deserves the designation.
Observatories may be classified as fully staffed if there is an operator
on duty everyday, unstaffed if the observatory is visited less than once
per month, or partially staffed if visits to the observatory fall between
these two extremes. A fully staffed observatory may be highly auto-
mated; an unstaffed observatory must be highly automated. Regardless
of the level of staffing or the degree of automation, the quality of the
data obtained from the observatory should meet accepted international
standards such as those promulgated by INTERMAGNET. In particular,
the final data disseminated by the observatory should have an absolute
accuracy of better than 5 nT, so that data may be used to study secular
variation and other long-period changes in the magnetic field. The
requirement for absolute accuracy, as opposed to relative accuracy, dis-
tinguishes magnetic observatories from other magnetometer installa-
tions. To define absolute accuracy consider the difference between the
true value of the magnetic field, B, and the reported value, Br;given
by d ¼ E þ s where E denotes a slowly varying or systematic error
and s denotes a random error. To achieve high absolute accuracy, E is
treated as a parameter that can be determined through a series of calibra-
tion, or “absolute”, observations that are used to correct the output
values of the magnetometer. If data are only used to study short-period
variations, relative accuracy, rather than absolute accuracy, is important.
We assume that E remains constant over the time interval t
2
–t
1
,sothat
the difference Br(t
2
)–Br(t
1
) will accurately represent B(t
2
)–B(t
1
), pro-
vided s is small, even though E, and therefore B(t
1
)andB(t
2
) are not
accurately known.
Alldredge (1962) designed a highly automated system, ASMO
(Automatic Standard Magnetic Observatory) which was intended to
produce outputs similar to those obtained by scaling standard magne-
tograms. However, since 1-min values were recorded to tape, it was
obvious that many additional types of analyses could be carried out.
ASMO consisted of a rubidium magnetometer located at the center of
a two-axis Helmholtz coil system. This was oriented such that the total
vector field would be biased to produce sequential changes in the angle
of declination and inclination. When installed at Castle Rock, California,
the system featured data transmission via telephone line to a receiving
and recording center 160 km away (Blesch, 1965). Thus, it fulfilled
several, but not all, of the requirements of an AMO.
The fluxgate magnetometer rapidly superceded the vector proton
magnetometer as the primary instrument in automated systems. For
example, AMOS, deployed in Canada in 1969 (Delaurier et al.,
1974), consisted of a triaxial fluxgate sensor mounted inside a square
Helmholtz coil system so that the sensor essentially operated in zero
field. D, H, Z (and F ) were sampled every minute and recorded on
tape. By 1974, it was agreed that the system was at least as reliable
as the photographic recorder it was intended to replace and could in
fact record large, dynamic magnetic storms, which the photographic
system was incapable of recording. AMOS featured an innovative
telephone verification system (TVS) that permitted remote diagnosis
of malfunctions. Given the lack of stability of fluxgate magnetome-
ters of that era, the deployment of AMOS did not eliminate or reduce
the need for absolute observations. There was no longer a need for
full-time personnel at the observatories, but part-time contractors were
still needed to perform absolute observations and other minor duties.
Thus, of the six areas of automation, AMOS addressed only the areas
(1) and (5).
Other early systems that incorporated fluxgate magnetometers
include those installed at Erdmagnetisches Observatorium Wingst in
1980 (Schultz, 1983), at British observatories in 1979 (Forbes and
Riddick, 1984) and at French high (southern) latitude observatories
in 1972 and at Chambon-la-Forêt (Bitterly et al., 1986).
By the mid-1980s advances in magnetometry, computers, and teleme-
try increased the possibilities for automation. Although developments
took place in many countries, the UK and United States (quickly joined
by France and Canada) spearheaded a movement to establish modern
standards for digital magnetometers and data. The initiative, which
evolved into INTERMAGNET, also promoted rapid telemetry and auto-
matic dissemination of data. Any observatory that adopts INTERMAG-
NET standards and specifications will possess a system capable of
providing digital data that can be collected, processed, and distributed
automatically. Such an observatory will typically possess a late genera-
tion fluxgate magnetometer system controlled by and recording data to a
computer or other microprocessor-controlled data collection platform
(DCP). Data will be filtered in the DCP to form 1-min values, which
will be transmitted by satellite or phone line to the host institute and/
or an INTERMAGNET geomagnetic information node (GIN), where,
after some basic error checking, they can be obtained automatically
by users. Thus an INTERMAGNET observatory is likely to achieve
complete automation of (1), almost complete automation of (2), and at
least some automation of (3) and (4).
One of the first such systems was ARGOS (Automatic Remote
Geomagnetic Observatory System), which became operational at
the three UK observatories in 1987. ARGOS consisted of a three-
component fluxgate and a proton precession magnetometer controlled
by a computer, which also acted as the data logger. Data were trans-
mitted to a central office by phone line. The US system was similar
in concept; however, it used a ring core fluxgate and the (GOES) for
transmission of data. The Canadian system, Canadian magnetic obser-
vatory system (CANMOS), used the same fluxgate magnetometer
as the US system and also used the GOES for data transmission. It
also included an improved remote diagnostic system. The French
system included an improved magnetometer operating in feedback
coils. Similar automated magnetometer systems are now (2005) in
operation at approximately 100 observatories.
Subsequent improvements to magnetometers and data collection sys-
tems have been concerned with magnetometer stability and sampling
rates. Efforts have been made to make the output of the fluxgate mag-
netometer as stable as possible, thus reducing the need for independent
absolute observations. Tilt-reducing sensor suspensions are capable of
eliminating the effects of pier movement. Temperature coefficients of
fluxgate magnetometers typically range from 0.1 to 1 nT K
1
(Rasson,
2001) leading to errors of up to 10 nT. Temperature coefficients can be
determined for some systems but for others it is simpler to keep the sys-
tem at a constant temperature. Most observatories recognize the need of
the scientific community for data at a faster sampling rate than 1-min;
many are now providing 1-s data.
Many observatories currently rely on GOES, Meteosat, or GMS for
telemetering 1-min data to the host institute. However, this method of
telemetry is incapable of coping with the increasing need for near-realtime
1-Hz data. The Internet, which is increasingly accessible at even remote
locations, is becoming the method of choice for many institutes, which
operate networks with satellite and phone systems serving as backup.
It is unlikely that data processing will ever be carried out without at
least some human intervention. There will always be instances when
judgment is necessary to decide on the validity of a datum or series of
data. A certain amount of data processing may be carried out in the
DCP; the rest is normally carried out after the data are received at the
host institute. Tasks that have been automated include removal of large
spikes, plotting of magnetograms, production of indices, computation of
hourly means, and computation and addition of preliminary baselines.
More difficult and perhaps impossible to completely automate are such
tasks as detection and removal of small spikes, especially at auroral lati-
tudes; handling of offsets; and calculation of final baselines, including
the detection and removal of spurious absolute observations.
Sodankylä and Tromsö were the first observatories to use the Inter-
net to display and download data (Linthe, 2001). Today many observa-
tories have taken advantage of the World Wide Web to provide access
to their data and products such as magnetogram plots, minute data
(and faster sampled data as well), hourly, monthly, and annual mean
values, indices, and observatory and network descriptions.
Automated error detection and diagnosis is extremely important
when an institute runs a network of unstaffed or partially staffed obser-
vatories. Frequently the part-time operator at the site can be instructed
714 OBSERVATORIES, AUTOMATION

on how to fix a problem once the nature of the problem has been
established. In addition, some problems can be corrected remotely
without on site human intervention. Tasks that can be performed remo-
tely include rebooting the computer, adjusting the time, changing
temperature of an instrument enclosure, adjusting pier differences,
removing spikes or periods of bad data, and erasing old files. Para-
meters that can be monitored include temperature, humidity, pier tilt,
and DF, the difference between F measured with a proton magnet-
ometer and F calculated from the values of a vector magnetometer.
To be considered a true AMO an observatory must either automate
its method of performing absolute observations or, alternatively, con-
struct as system that is so stable that absolute observations need be car-
ried out infrequently. With one notable exception, the vector proton
magnetometer (VPM) has been the instrument of choice for either of
these approaches. One of the most successful of these has been Kasm-
mer (Kakioka Automatic Standard Magnetometer), first installed at
Kakioka Observatory in 1973. Both the British and US systems have
employed VPMs, known as DIDD (delta I-delta D) as a means of pro-
viding baseline control for the fluxgate magnetometers. Recently the
US Geological Survey and the Eötvös Loránd Geophysical Institute
of Hungary have collaborated to produce a highly stable DIDD featur-
ing a compact spherical coil design. Evaluations of the system have
proved encouraging (Pankratz, 1998; Csontos et al., 2001; Schott
et al., 2001). Nevertheless, the DIDD is still susceptible to pier tilt
and other forms of misalignment and can therefore be considered
only quasi-absolute. Independent absolute observations are still
required to meet the standards mentioned earlier. However, in a region
otherwise devoid of observator ies, one equipped with a good quasi-
absolute DIDD would certainly be better than no observatory at all.
Meanwhile, efforts continue to improve VPMs. In France, a
4
He pumped
magnetometer is being developed which will eliminate the need for a
coil system (Gravrand et al., 2001); consideration is also being consid-
ered to developing a tilt-compensating suspension for the Hungarian
or US system.
A totally different approach to automating absolute observations
has been taken by Rasson (1996): the automation of a declination-
inclination magnetometer (DIM). The DIM consists of a single-axis
fluxgate sensor mounted on a nonmagnetic theodolite; by rotating and
tumbling the telescope in a prescribed manner the angle of declination
and inclination can be obtained. Rasson has been able to automate this
process through the use of piezoelectric motors, digital readout of the
circles, accurate recording of tilt and the use of an autocollimator for
sighting the reference mark. Development is also underway of an alter-
native version using a north-seeking gyroscope to eliminate the need for
a reference mark; this would potentially make it possible to install the
device on an ocean bottom observatory magnetometer, thus fulfilling a
long-standing dream of the observatory community.
Lawrence R. Newitt
Bibliography
Alldredge, L.R., 1962. A Proposed Automatic Standard Magnetic
Observatory. U.S. Department of Commerce, Coast and Geodetic
Survey, Washington.
Bitterly, J., Cantin, J.M., Burdin, J., Schlich, R., Folques, J., and
Gilbert, D., 1986. Digital recording of variations in the Earth’s
magnetic field in French observatories: Description of equipment
and results for the period 1972–86. In Proceedings of the Interna-
tional Workshop on Magnetic Observatory Instruments, Geological
Survey of Canada Paper 88-17: 75 –81.
Blesch, J., 1965. An automatic magnetic observatory. Geophysical
Technical Memorandum No. 21, Varian Associates.
Csontos, A., Hegymegi, L., Heilig, B., and Kõmendi, A., 2001. The
test results of the Delta AI@ Delta AD@ (DIDD) measurement
system at the Tihany Geomagnetic Observatory of Elgi. Contribu-
tions to Geophysics and Geodesy, 31:83–89.
Delaurier, J.M., Loomer, E.I., Jansen van Beek, J., and Nandi, A.,
1974. Editing and evaluating recorded geomagnetic components at
Canadian observatories. Publication of the Earth Physics Branch,
44(9):235–242.
Forbes, A.J., and Riddick, J.C., 1984. The digital recording system
operated at the U.K. magnetic observatories. Geophysical Surveys,
6: 393–405.
Gravrand, O., Khokhlov, A., Le Mouël, J.-L., and Léger, J.M., 2001.
On the calibration of a vectorial,
4
He pumped magnetometer. Earth
Planets Space, 53: 949–958.
Linthe, H.-J., 2001. How geomagnetic observatories present collected
data. Contributions to Geophysics and Geodesy, 31: 151–158.
Pankratz, L.W., Test Results on a New Hungarian/US Delta I–Delta D
(DIDD) Quasi-absolute Spherical Coil System, 1998. VIIth IAGA
Workshop on Magnetic Observatory Instruments, Data Acquisition
and Processing, Scientific Technical Report STR98/21, 147–149
GeoForschunsZentrum, Potsdam.
Rasson, J.L., 1996. Report on the progress in the design of an auto-
mated diflux. In Proceedings of the VIth Workshop on Geomag-
netic Observatory Instruments Data Acquisition and Processing,
Publication scientifique et technique No. 003, Institut Royal
Meteorologique-De Belgique, pp. 190–194.
Rasson, J.L., 2001. The status of the world-wide network of magnetic
observatories, their location and instrumentation. Contributions to
Geophysics and Geodesy, 31: 427–439.
Schott, J.J., Boulard, V., Pérès, A., Cantin, J.M., and Bitterly, J., 2001.
Magnetic component measurements with the DIDD. Contributions
to Geophysics and Geodesy, 31:35–42.
Schultz, G., 1983. Experience with a digitally recording magnetometer
system at Wingst geomagnetic observatory. Deutsche Hydrogra-
phische Zeitschrift, 36: 173–190.
Cross-references
Observatories, INTERMAGNET
Observatories, Overview
OBSERVATORIES, INTERMAGNET
INTERMAGNET (International Real-time Magnetic Observatory
Network) was created in order to establish a worldwide network of
cooperating digital magnetic observatories. Those observatories agree
to adopt modern standard specifications for measuring and recording
equipment and to exchange data in close to real time. Moreover,
INTERMAGNET extends technical support for maintaining and
upgrading existing magnetic observatories as well as for establishing
new ones.
INTERMAGNET defines standards for the measurement and
recording of the geomagnetic field, considering the state of the art
(see Observatories, instrumentation). INTERMAGNET is constituted
from existing groups whose task is geomagnetic observatory measure-
ment. The abbreviation IMO is used to indicate an INTERMAGNET
Magnetic Observatory (Green et al., 1998).
Short history
The idea of a near real-time observatory network arose independently
from discussions inside the Geological Survey of Canada and between
US Geological Survey (USGS) and British Geological Survey in 1986
during an IAGA workshop in Ottawa (see IAGA, International Asso-
ciation of Geomagnetism and Aeronomy). The idea was expanded to
a global concept at the International Union of Geophysics and Geodesy
(IUGG) assembly in Vancouver in 1987 as Institut de Physique du Globe
de Paris joined. The network was based on magnetic observatories com-
municating as meteorological data collecting platforms and transmitting
OBSERVATORIES, INTERMAGNET 715