Hassani S. Mathematical Methods: For Students of Physics and Related Fields
Подождите немного. Документ загружается.

556 First-Order Differential Equations
23.3 First-Order Linear Differential Equations
A linear DE is a sum of terms each of which is the product of a derivative
of the dependent variable (say y) and a function of the independent variable
(say x). The highest order of the derivative is called the order of the linear
order of a linear
DE
DE. The most general first-order linear differential equation (FOLDE) is
p
1
(x)y
+ p
0
(x)y = q(x) ⇔ p
1
dy +(p
0
y − q) dx =0. (23.9)
If this equation is to have a solution, then by the argument at the end of the
last subsection, it must have at least one integrating factor. Let μ(x, y)bean
integrating factor. Then there exists v(x, y) such that
dv = μ(p
0
y − q) dx + μp
1
dy =0
The necessary and sufficient condition for this to hold is
∂
∂y
[μ(p
0
y − q)] =
∂
∂x
(μp
1
).
To simplify the problem, let us assume that μ is a function of x only (we are
looking for any integrating factor, not the most general one). Then the above
condition leads to the differential equation
μp
0
=
d
dx
(μp
1
)=p
1
dμ
dx
+ μ
dp
1
dx
(23.10)
or
p
1
dμ
dx
= μ
p
0
−
dp
1
dx
⇒
dμ
μ
=
p
0
p
1
dx −
dp
1
p
1
.
Integrating both sides gives
ln μ =
#
p
0
p
1
dx −ln p
1
+lnC ⇒ ln
μp
1
C
=
#
p
0
p
1
dx
or
μp
1
C
= e
p
0
dx/p
1
⇒ μ =
Ce
p
0
dx/p
1
p
1
.
Neglecting the unimportant constant of integration, we have found the in-
tegrating factor μ =exp[(
p
0
dx/p
1
)]/p
1
. Now multiply both sides of the
original equation by μ to obtain
μp
1
y
+ μp
0
y = μq. (23.11)
With the identity μp
1
y
≡ (μp
1
y)
− (μp
1
)
y and the fact that (μp
1
)
= μp
0
[the first equality of Equation (23.10)], Equation (23.11) becomes
d
dx
(μp
1
y)=μq ⇒ μp
1
y =
#
μ(x)q(x) dx + C.
23.3 First-Order Linear Differential Equations 557
Therefore, explicit solution of
a general
first-order linear
differential
equation
Theorem 23.3.1. Any FOLDE of the form p
1
(x)y
+p
0
(x)y = q(x),inwhich
p
0
, p
1
,andq are continuous functions in some interval (a, b), has a general
solution
y = f(x)=
1
μ(x)p
1
(x)
C +
#
μ(x)q(x) dx
, (23.12)
where C is an arbitrary constant, and
μ(x)=
1
p
1
(x)
exp
#
p
0
(x)
p
1
(x)
dx
. (23.13)
Example 23.3.2.
In an electric circuit with a resistance R and a capacitance C, detailed treatment
of an RC circuitKirchhoff’s law gives rise to the equation RdQ/dt+ Q/C = V (t), where V (t)isthe
time-dependent voltage and Q is the (instantaneous) charge on the capacitor. This
is a simple FOLDE with p
1
= R, p
0
=1/C,andq = V . The integrating factor is
μ(t)=
1
R
exp
#
1
RC
dt
=
1
R
e
t/RC
,
which yields
Q(t)=
1
μ(t)p
1
(t)
B +
1
R
#
e
t/RC
V (t) dt
= Be
−t/RC
+
e
−t/RC
R
#
e
t/RC
V (t) dt.
Recall that an indefinite integral can be written as a definite integral whose upper
limit is the independent variable—in which case we need to use a different symbol
for the integration variable. For the arbitrary lower limit, choose zero. We then
have
Q(t)=Be
−t/RC
+
e
−t/RC
R
#
t
0
e
s/RC
V (s) ds. (23.14)
Let Q(0) ≡ Q
0
be the initial charge. Then, substituting t = 0 in (23.14), we get
Q
0
= B and the charge at time t will be given by
Q(t)=Q
0
e
−t/RC
+
e
−t/RC
R
#
t
0
e
s/RC
V (s) ds. (23.15)
As a specific example, assume that the voltage is a constant V
0
,asinthecase
of a battery. Then the charge on the capacitor as a function of time will be
Q(t)=Q
0
e
−t/RC
+ V
0
C(1 − e
−t/RC
).
It is interesting to note that the final charge Q(∞)isV
0
C, independent of the initial
charge. Intuitively, this is what we expect, of course, as the “capacity” of a capacitor
to hold electric charge should not depend on its initial charge.
558 First-Order Differential Equations
Example 23.3.3. As a concrete illustration of the general formula derived in the
previous example, we find the charge on a capacitor in an RC circuit when a voltage,
V (t)=V
0
cos ωt, is applied to it for a period T andthenremoved. V (t)canthus
be written as
V (t)=
0
V
0
cos ωt if t<T,
0ift>T.
The general solution is given as Equation (23.15). We have to distinguish between
two regions in time, t<T and t>T.
(a) For t<T, we have (using a table of integrals)
Q(t)=Q
0
e
−t/RC
+
e
−t/RC
R
#
t
0
e
s/RC
V
0
cos ωsds
= Q
0
e
−t/RC
+
V
0
R
1
(1/RC)
2
+ ω
2
−
1
RC
e
−t/RC
+
cos ωt
RC
+ ω sin ωt
If T RC, and we wait long enough,
3
i.e., t RC, then only the oscillatory part
survives due to the large negative exponents of the exponentials. Thus,
Q(t) ≈
V
0
R
1
(1/RC)
2
+ ω
2
cos ωt
RC
+ ω sin ωt
.
The charge Q(t) oscillates with the same frequency as the driving voltage.
(b) For t>T, the integral goes up to T beyond which V (t) is zero. Hence, we have
Q(t)=Q
0
e
−t/RC
+
e
−t/RC
R
#
T
0
e
s/RC
V
0
cos ωsds
= Q
0
e
−t/RC
+
V
0
/R
(1/RC)
2
+ ω
2
−
e
−t/RC
RC
+ e
(T −t)/RC
cos ωT
RC
+ ω sin ωT
.
We note that the oscillation has stopped (sine and cosine terms are merely constants
now), and for t −T RC, the charge on the capacitor becomes negligibly small: If
there is no applied voltage, the capacitor will discharge.
Although first-order linear DEs can always be solved—yielding solutions as
given in Equation (23.12)—no general rule can be applied to solve a general
FODE. Nevertheless, it can be shown that a solution of such a DE always
exist, and, under some mild conditions, this solution is unique. Some special
nonlinear FODEs can be solved using certain techniques some of which are
described in the following examples as well as the problems at the end of the
chapter.
Example 23.3.4.
In Problem 23.11 you are asked to find the velocity of a fallingfalling object with
air resistance object when the air drag is proportional to velocity. This is a good approximation
at low velocities for small objects; at higher speeds, and for larger objects, the drag
force becomes proportional to higher powers of speed. Let us consider the case when
the drag force is proportional to v
2
. Then the second law of motion becomes
m
dv
dt
= mg − bv
2
⇒
dv
dt
= g − γv
2
,γ≡
b
m
.
3
Of course, we still assume that t<T.
23.3 First-Order Linear Differential Equations 559
This equation can be written as
dv
g −γv
2
= dt ⇒
dv
A
2
− v
2
= γdt, A
2
=
g
γ
. (23.16)
Now we rewrite
1
A
2
− v
2
=
1
2A
1
v + A
−
1
v − A
,
multiply both sides of Equation (23.16) by 2A and integrate to obtain
ln |v + A|−ln |v − A| =2Aγt +lnC,
where we have written the constant of integration as ln C for convenience. This
equation can be rewritten as
v + A
v − A
= Ce
2Aγt
.
Suppose that at t = 0, the velocity of the falling object is v
0
,then
v
0
+ A
v
0
− A
= C
and
v + A
v −A
=
v
0
+ A
v
0
− A
e
2Aγt
.
Now note that A>0, and v>0 (if we take “down” to be the positive direction).
Therefore, the last equation becomes
v + A
|v −A|
=
v
0
+ A
|v
0
− A|
e
2Aγt
.
Suppose that v
0
>A; then we can remove the absolute value sign from the RHS,
and since the two sides must agree at t = 0, we can remove the absolute value sign
on the LHS as well. Similarly, if v
0
<A,thenv<Aas well. It follows that
v + A
v − A
=
v
0
+ A
v
0
− A
e
2Aγt
⇒ (v + A)(v
0
− A)=(v − A)(v
0
+ A)e
2Aγt
.
Solving for v gives
v = A
(v
0
+ A)e
2Aγt
+ v
0
− A
(v
0
+ A)e
2Aγt
− (v
0
− A)
= A
v
0
(e
2Aγt
+1)+A(e
2Aγt
− 1)
v
0
(e
2Aγt
− 1) + A(e
2Aγt
+1)
(23.17)
= A
v
0
cosh(Aγt)+A sinh(Aγt)
v
0
sinh(Aγt)+A cosh(Aγt)
.
It follows from Equation (23.17) that at t = 0, the velocity is v
0
,asweexpect. It
also shows that, when t →∞, the velocity approaches A =
g/γ, the so-called
terminal velocity. This is the velocity at which the gravitational force and the terminal velocity
drag force become equal, causing the acceleration of the object to be zero. The
terminal velocity can thus be obtained directly from the second law without solving
the differential equation.
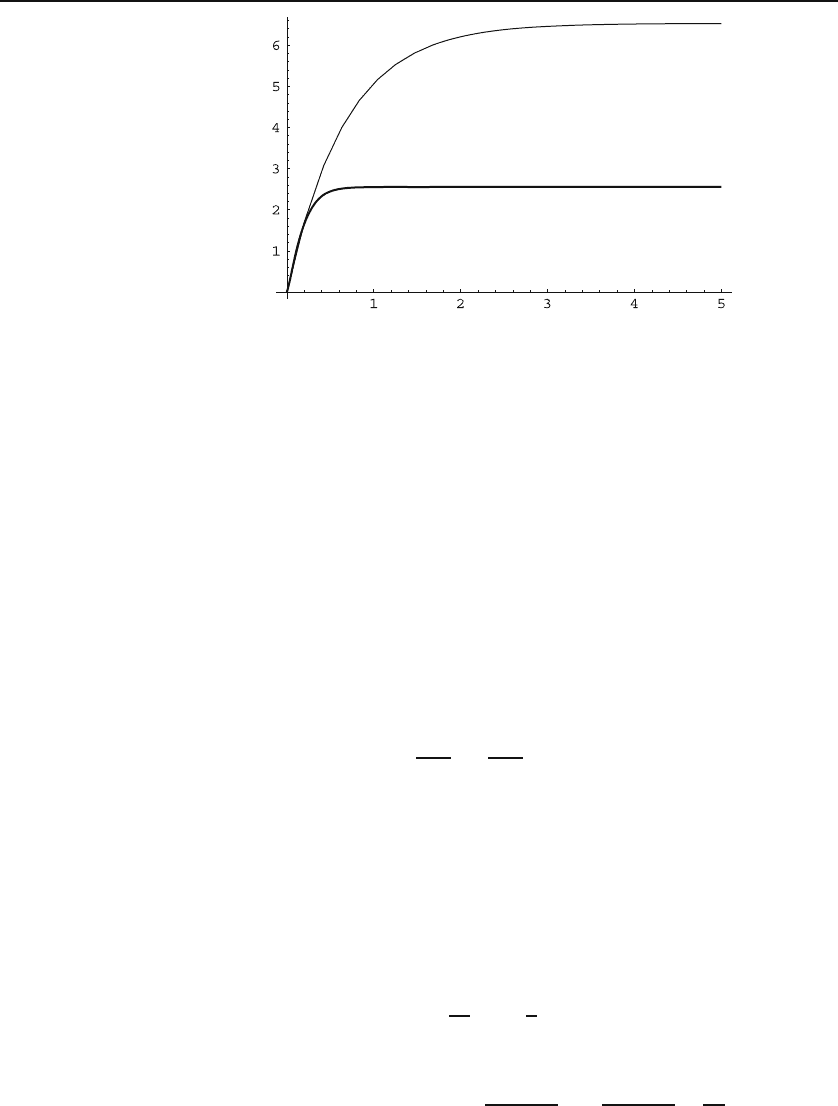
560 First-Order Differential Equations
Figure 23.1: The achievement of terminal velocity for a drag force that is proportional
to the square of speed (the heavy curve) is considerably faster than for a drag force that
is linear in speed (the light curve) if γ has the same numerical value for both cases.
Figure 23.1 shows the plot of speed as a function of time for the two cases of the
drag force being proportional to v and v
2
with the same proportionality constant.
Because of the higher power of speed, the terminal velocity is achieved considerably
more quickly for v
2
force than for v force. Furthermore, as the figure shows clearly,
the terminal speed itself is much smaller in the former case. Since larger surfaces
provide a v
2
drag force, parachutes that have very large surface are desirable.
Example 23.3.5. We consider here some other examples of (nonlinear) FODEs
whose solutions are available:
(a) Bernoulli’s FODE: This equation is of the form y
+ p(x)y + q(x)y
n
=0whereBernoulli’s FODE
n = 1. This DE can be simplified if we substitute y = u
r
and choose r appropriately.
In terms of u, the DE becomes
u
+
p(x)
r
u +
q(x)
r
u
nr−r+1
=0.
The simplest DE—whose solution could be found by a simple integration—would
be obtained if the exponent of the last term could be set equal to 1. But this would
require r to be zero, which is not acceptable. The next simplest DE results if we set
the exponent equal to zero, i.e., if r =1/(1 − n). Then the DE becomes
u
+(1− n)p(x)u +(1− n)q(x)=0
which is a first-order linear DE whose solution we have already found.
(b) Homogeneous FODE:ThisDEisoftheformhomogeneous
FODE
dy
dx
= w
y
x
.
To find the solution, make the obvious substitution u = y/x,toobtainy
= u + xu
and
u + xu
= w(u) ⇒ u
=
w(u) −u
x
⇒
du
w(u) −u
=
dx
x
23.4 Problems 561
with the solution
ln x =
#
u
c
dt
w(t) − t
or x =exp
A
#
y/x
c
dt
w(t) − t
B
,
where c is an arbitrary constant to be determined by the initial conditions.
23.4 Problems
23.1. Suppose that region D is contractible to zero. Using the equivalence of
the vanishing of curl and vanishing of closed line integrals, show that ∂M/∂y =
∂N/∂x is both necessary and sufficient condition for Mdx+Ndyto be exact.
23.2. Verify that μ = C/(x
2
+y
2
) is an integrating factor of xdy−ydxwhich
gives rise to
v =tan
−1
y
x
= constant ⇒
y
x
= C
for a solution of xdy− ydx.
23.3. Find the general solution of Bernoulli’s FODE
y
+ p(x)y + q(x)y
n
=0 where n =1.
Hint: See Example 23.3.5.
23.4. Find a solution to the linear fractional DE
dy
dx
=
a
1
x + a
2
y
b
1
x + b
2
y
where a
1
b
2
= a
2
b
1
.
Hint: Divide the numerator and denominator by x to obtain a homogeneous
FODE.
23.5. Lagrange’s FODE is y − xp(y
) − q(y
)=0. Lagrange’s FODE
(a) Let y
= t and consider x as a function of t. Using the chain rule, find
dx/dt in terms of dy/dt.
(b) Differentiate Lagrange’s DE with respect to t. Use the result of this
differentiation and that of (a) to arrive at [t −p(t)] ˙x − ˙px =˙q,wherethedot
indicates differentiation with respect to t.
(c) Find the (parametric) solution of the DE, considering two separate cases:
t = p(t)andt = p(t).
23.6. Let u(x, y)=C be a solution of the DE Mdx+ Ndy= 0. Show that:
(a) (∂u/∂x)/M =(∂u/∂y)/N ;and
(b) μ(x, y) ≡ (∂u/∂x)/M is an integrating factor for the DE.
23.7. Use direct differentiation to show that the function given in Equation
(23.12) solves the FOLDE of Equation (23.9).
562 First-Order Differential Equations
23.8. Analyze the capacitor’s charge in an RC circuit in which a constant
potential V
0
is applied for a time T>0 and then disconnected. Consider the
cases where t<T and t>T.
23.9. Find all functions f (x) whose definite integral from 0 to x equals the
square of their reciprocal.
23.10. (a) Let p
1
u
+p
0
u = 0 be a homogeneous FOLDE in u.Solveit.(Note
that it can easily be integrated.)
(b) Consider p
1
y
+ p
0
y = q.Lety = uv,whereu is as in (a), and obtain
an equation for v. Solve this equation, and obtain a general solution for
p
1
y
+ p
0
y = q. This is the method of variation of parameters,whichcan
also be used for second-order differential equations.
23.11. A falling body in air has a motion approximately described by the DE
mdv/dt = mg − bv,wherev = dx/dt is the velocity of the body. Find this
velocity as a function of time assuming that the object starts from rest.
23.12. Suppose that both the linear (av) and the quadratic (bv
2
)termsare
present in the fall of an object with air drag.
(a) Solve the DE and find the most general solution for the velocity as a
function of time. Hint: Make the substitution u = v + a/2b.
(b) From this general solution, extract the solutions to the cases where only
the linear and only the quadratic terms are present by taking the limits b → 0
and a → 0.
23.13. Take the limit of Equation (23.17) as t →∞and show that it is equal
to
g/γ.

Chapter 24
Second-Order Linear
Differential Equations
The majority of problems encountered in physics lead to second order linear
differential equations (SOLDEs) when the so-called nonlinear terms are ap-
proximated out. Thus, a general treatment of the properties and methods
of obtaining solutions to SOLDEs is essential. In this section, we investigate
their general properties, and leave methods of obtaining their solutions for
the next section and later chapters.
The most general SOLDE is
p
2
(x)
d
2
y
dx
2
+ p
1
(x)
dy
dx
+ p
0
(x)y = p
3
(x). (24.1)
Dividing by p
2
(x), and writing p for p
1
/p
2
, q for p
0
/p
2
,andr for p
3
/p
2
,
reduces Equation (24.1) to the normal form,
normal form of a
SOLDE
d
2
y
dx
2
+ p(x)
dy
dx
+ q(x)y = r(x). (24.2)
Equation (24.2) is equivalent to (24.1) if p
2
(x) = 0. The points at which p
2
(x)
vanishes are called the singular points of the DE.
difference between
singular points of
linear and
nonlinear
differential
equations
There is a crucial difference between the singular points of linear DEs and
those of nonlinear DEs. For a nonlinear DE such as (x
2
− y)y
= x
2
+ y
2
,
the curve y = x
2
is the collection of singular points. This makes it impossible
to construct solutions y = f (x) that are defined on an interval I =[a, b]of
the x-axis because for any a<x<b,thereisay = x
2
for which the DE is
undefined. On the other hand, linear DEs do not have this problem because
the coefficients of the derivatives are functions of x only. Therefore, all the
singular “curves” are vertical, and we can find intervals on the x-axis in which
the DE is well behaved.
564 Second-Order Linear Differential Equations
24.1 Linearity, Superposition, and Uniqueness
The FOLDE has only one solution; and we found this solution in closed form
in Equation (23.12). The SOLDE may have (in fact, it does) more than one
solution. Therefore, it is important to know how many solutions to expect for
a SOLDE and what relation (if any) exists between these solutions.
We write Equation (24.1) as
L[y]=p
3
where L ≡ p
2
d
2
dx
2
+ p
1
d
dx
+ p
0
. (24.3)
It is clear that L is a linear operator
1
bywhichwemeanthatforconstants
α and β, L[αy
1
+ βy
2
]=αL[y
1
]+βL[y
2
]. In particular, if y
1
and y
2
are two
solutions of Equation (24.3), then
L[y
1
− y
2
]=L[y
1
] −L[y
2
]=p
3
− p
3
=0.
That is, the difference between any two solutions of a SOLDE is a solution
2
of the homogeneous equation obtained by setting p
3
= 0. An immediatehomogeneous
SOLDE
consequence of the linearity of L is that any linear combination of solutions
of the homogeneous SOLDE (HSOLDE) is also a solution. This is called the
superposition principle.
superposition
principle
We saw in the introduction to Chapter 22 that, based on physical intu-
ition, we expect to be able to predict the behavior of a physical system if we
know the DE obeyed by that system and equally importantly, the initial data.
Physical intuition also tells us that if the initial conditions are changed by an
infinitesimal amount, then the solutions will be changed infinitesimally. Thus,
the solutions of linear DEs are said to be continuous functions of the initial
conditions. Nonlinear DEs can have completely different solutions for two
initial conditions that are infinitesimally close. Since initial conditions cannot
be specified with mathematical precision in practice, nonlinear DEs lead to
unpredictable solutions, or chaos. This subject has received much attention
in recent years, and we shall present a brief discussion of chaos in Chapter 31.
By its very nature, a prediction is expected to be unique. This expectation
for linear equations becomes—in the language of mathematics—an existence
and a uniqueness theorem. First, we need the following
3
Theorem 24.1.1. The only solution g(x) of the homogeneous equation y
+
py
+ qy =0, defined on the interval [a, b], which satisfies g(a)=0=g
(a),is
the trivial solution, g =0.
Let f
1
and f
2
be two solutions of (24.2) satisfying the same initial condi-
tions on the interval [a, b]. This means that f
1
(a)=f
2
(a)=c and f
1
(a)=
1
Recall from Chapter 7 that an operator is a correspondence on a vector space that
takes one vector and gives another. A linear operator is an operator that satisfies Equation
(7.3). The vector space on which L acts is the vector space of differentiable functions.
2
This conclusion is not limited to the SOLDE; it holds for all linear DEs.
3
For a proof, see Hassani, S. Mathematical Physics: A Modern Introduction to Its Foun-
dations, Springer-Verlag, 1999, p. 354.

24.1 Linearity, Superposition, and Uniqueness 565
f
2
(a)=c
for some given constants c and c
. Then it is readily seen that their
difference, g ≡ f
1
− f
2
, satisfies the homogeneous equation [with r(x)=0].
The initial condition that g(x) satisfies is clearly g(a)=0=g
(a). By Theo-
rem 24.1.1, g =0orf
1
= f
2
. We have just shown uniqueness of
solutions to
SOLDE
Theorem 24.1.2. (Uniqueness Theorem).Ifp and q are continuous on
[a, b], then at most one solution of Equation (24.2) can satisfy a given set of
initial conditions.
The uniqueness theorem can be applied to any homogeneous SOLDE to
find the latter’s most general solution. In particular, let f
1
(x)andf
2
(x)be
any two solutions of
y
+ p(x)y
+ q(x)y = 0 (24.4)
defined on the interval [a, b]. Assume that the two vectors v
1
=(f
1
(a),f
1
(a))
and v
2
=(f
2
(a),f
2
(a)) are linearly independent.
4
Let g(x)beanotherso-
lution. The vector (g(a),g
(a)) can be written as a linear combination of v
1
and v
2
, giving the two equations
g(a)=c
1
f
1
(a)+c
2
f
2
(a),
g
(a)=c
1
f
1
(a)+c
2
f
2
(a).
The function u(x) ≡ g(x) − c
1
f
1
(x) − c
2
f
2
(x) satisfies the DE (24.4) and
the initial conditions u(a)=u
(a) = 0. It follows from Theorem 24.1.1 that
u(x)=0org(x)=c
1
f
1
(x)+c
2
f
2
(x). We have proved basis of solutions
Theorem 24.1.3. Let f
1
and f
2
be two solutions of the HSOLDE
y
+ py
+ qy =0,
where p and q are continuous functions defined on the interval [a, b].If
(f
1
(a),f
1
(a)) and (f
2
(a),f
2
(a)) are linearly independent vectors, then every
solution g(x) of this HSOLDE is equal to some linear combination
g(x)=c
1
f
1
(x)+c
2
f
2
(x),
with constant coefficients c
1
and c
2
. The functions f
1
and f
2
are called a
basis of solutions of the HSOLDE.
The uniqueness theorem states that only one solution can exist for a
there is also an
existence theorem!
SOLDE which satisfies a given set of initial conditions. Whether such a
solution does exist is beyond the scope of the theorem. Under some mild
assumptions, however, it can be shown that a solution does indeed exist. We
shall not prove this existence theorem for a general SOLDE, but shall examine
various techniques of obtaining solutions for specific SOLDEs in this and the
next two chapters.
4
If they are not, then one must choose a different initial point for the interval.