King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.

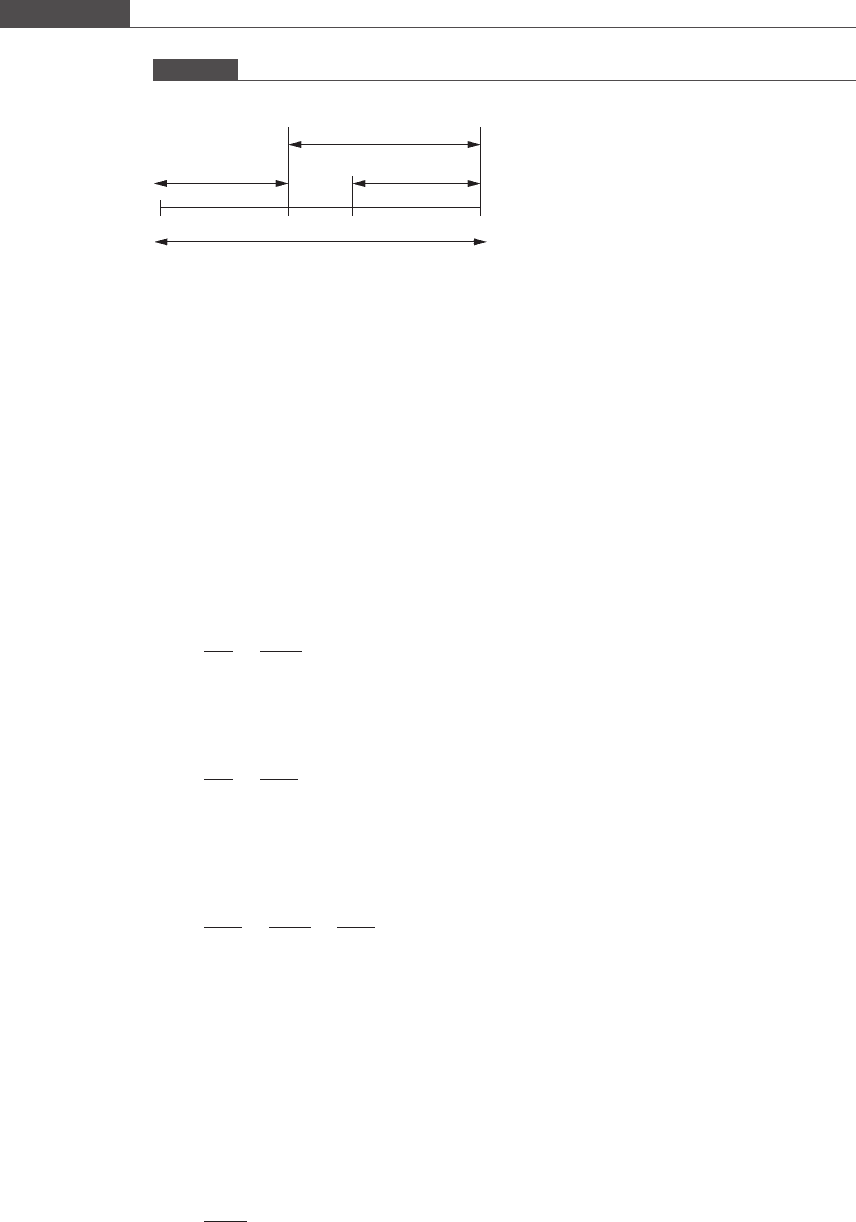
In the golden section search method, once a bracketing interval is identified (for
now, assume that the initial bracketing interval has length ab equal to one), two
points x
1
and x
2
in the interval are chosen such that they are positioned at a distance
equal to ð1 rÞ from the two ends. Thus , the two interior points are symmetrically
located in the interval (see Figure 8.7).
Because this is the first iteration, the function is evaluated at both interior points.
A subinterval that brackets the minimum is selected using the algorithm discussed
above. If fx
1
ðÞ
4
fx
2
ðÞ, interval x
1
; b½is selec ted. On the other hand, if fx
1
ðÞ
5
fx
2
ðÞ,
interval a; x
1
½is selected. Regardless of the subinterval selected, the width of the new
bracket is r. Thus, the interval has been reduced by the fraction r.
The single interior point in the chosen subinterval divides the new bracket
according to the golden ratio. This is illustrated next. Suppose the subinterval
x
1
; b½is selected. Then x
2
divides the new bracket according to the ratio
x
1
b
x
2
b
¼
r
1 r
;
which is equal to the golden ratio (see Equation (8.5)). Note that x
2
b is the longer
segment of the line x
1
b, and x
1
b is a golden section. Therefore, we have
x
1
b
x
2
b
¼
x
2
b
x
1
x
2
:
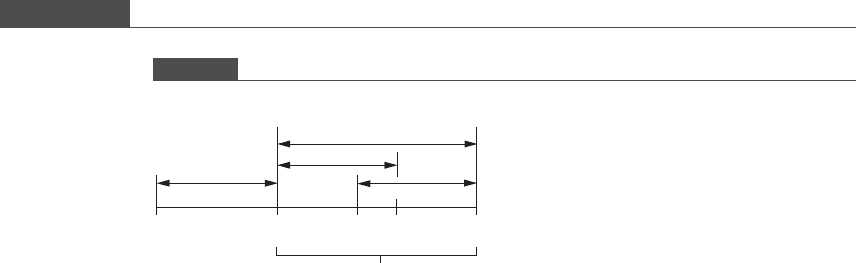
Therefore, one interior point that divides the interval according to the golden ratio is
already determined. For the next step, we need to find only one other point x
3
in the
interval x
1
; b½such that
x
1
b
x
1
x
3
¼
r
1 r
¼
x
1
x
3
x
3
b
:
This is illustrated in Figure 8.8.
The function is evaluated at x
3
and compared with fx
2
ðÞ. Depending on the
outcome of the comparison, either segment x
1
x
2
or segment x
3
b is discarded. The
width of the new interval is 1 – r, which is equal to r
2
. Thus, the interval x
1
; b½of
length r has been reduced to a smaller interval by the fraction r. Thus, at every step,
the interval size that brackets the minimum is reduced by the fraction r = 0.618.
Since each iteration discards 38.2% of the current interval, 61.8% of the error in the
estimation of the minimum is retained in each iteration. The ratio of the errors of two
consecutive iterations is
"
iþ1
jj
"
i
jj
¼ 0:618:
Figure 8.7
First iteration of the golden section search method
a
b
x
1
1 − r
r
1
x
2
1 – r
497
8.2 Unconstrained single-variable optimization
Comparing the above expression with Equation (5.10), we find r = 1 and C = 0.618.
The convergence rate of this method is therefore linear. The interval reduction step is
repeated until the width of the bracket falls below the tolerance limit.
Algorithm for the golden section search method
(1) Choose an initial interval ½a; b that brackets the minimum point of the unimodal
function and evaluate fðaÞ and fðbÞ.
(2) Calculate two points x
1
and x
2
such that x
1
¼ 1 rðÞðb aÞþa and
x
2
¼ rðb aÞþa, where r ¼ð
ffiffiffi
5
p
1Þ=2 and b a is the width of the interval.
(3) Evaluate fx
1
ðÞand fx
2
ðÞ.
(4) The function values are compared to determine which subinterval to retain.
(a) If fx
1
ðÞ
4
fx
2
ðÞ, then the subinterval ½x
1
; b is chosen. Set a ¼ x
1
; x
1
¼ x
2
;
faðÞ¼fx
1
ðÞ; fx
1
ðÞ¼fx
2
ðÞ; and calculate x
2
¼ rðb aÞþa and fx
2
ðÞ.
(b) If fx
1
ðÞ
5
fx
2
ðÞ, then the subinterval ½a; x
2
is chosen. Set b ¼ x
2
; x
2
¼ x
1
;
fbðÞ¼fx
2
ðÞ; fx
2
ðÞ¼fx
1
ðÞ; and find x
1
¼ 1 rðÞðb aÞþa and fx
1
ðÞ.
(5) Repeat step (4) until the size of the interval is less than the tolerance specification.
Another bracketing method that requires the determination of only one new
interior point at each step is the Fibonacci search method. In this method, the
fraction by which the interval is reduced varies at each stage. The advantage of
bracketing methods is that they are much less likely to fail compared to deriva tive-
based methods, when the derivative of the function does not exist at one or more
points at or near the extreme point. Also, if there are points of inflection located
within the interval, in addition to the single extremum, these will not influence the
search result of a bracketing method. On the other hand, Newton’s method is
likely to converge to a point of inflection, if it is located near the initial guess
value.
Using MATLAB
The MATLAB software contains the function fminbnd, which performs minimi-
zation of a nonlinear function in a single variable within a user-specified interval
(also termed as bound). In other words, fminbnd carries out bounded single-
variable optimization by minimizing the objective function supplied in the function
call. The minimization algorithm is a combinat ion of the golden section search
method and the parabolic interpolation method. The syntax is
Figure 8.8
Second iteration of the golden section search method
a
b
x
1
1 − r
r
x
2
1 − r
x
3
1 − r
New bracket
498
Nonlinear model regression and optimization

x = fminbnd(func, x1, x2)
or
[x, f] = fminbnd(func, x1, x2)
func is the handle to the function that calculates the value of the objective
function at a single value of x; x
1
and x
2
specify the endpoints of the interval
within which the optimum value of x is sought. The function output is the value of
x that minimi zes fu nc, and, optionally, the value of the objective function at x.An
alternate syntax is
x = fminbnd(func, x1, x2, options)
options is a structure that is created using the optimset function. You can set the
tolerance for x, the maximum number of function evaluations, the maximum
number of iterations, and other features of the optimizat ion procedure using
optimset. The default tolerance limit is 0.0001 on a change in x and fðxÞ. You
can use optimset to choose the display mode of the result. If you want to display
the optimization result of each iteration, create the options structure using the
syntax below.
options = optimset(‘Display’, ‘ iter’)
Box 8.2C Optimization of a fermentation process: maximization of profit
We solve the optimization problem discussed in Box 8.2A using the golden section search method.
MATLAB program 8.5 (listed below) minimizes a single-variable objective function using this method.
MATLAB program 8.5
function goldensectionsearch(func, ab, tolx)
% The golden section search method is used to find the minimum of a
% unimodal function.
% Input variables
% func: nonlinear function to be minimized
% ab : bracketing interval [a, b]
% tolx: tolerance for estimating the minimum
% Other variables
r = (sqrt(5) - 1) /2; % interval reduction ratio
k = 0; % counter
% Bracketing interval
a = ab(1);
b = ab(2);
fa = feval(func, a);
fb = feval(func, b);
% Interior points
x1 = (1 - r)*(b - a) + a;
499
8.2 Unconstrained single-variable optimization

8.3 Unconstrained multivariable optimization
In this section, we focus on the minimization of an objective function fðxÞof n variables,
where x ¼ x
1
; x
2
; ...; x
n
½.IffðxÞis a smooth and continuous function such that its first
x2 = r*(b - a) + a;
fx1 = feval(func, x1);
fx2 = feval(func, x2);
% Iterative solution
while (b - a) > tolx
if fx1 > fx2
a = x1; % shifting interval left end-point to the right
fa = fx1;
x1 = x2;
fx1 = fx2;
x2 = r*(b - a) + a;
fx2 = feval(func, x2);
else
b = x2; % shifting interval right end-point to the left
fb = fx2;
x2 = x1;
fx2 = fx1;
x1 = (1 - r)*(b - a) + a;
fx1 = feval(func, x1);
end
k=k+1;
end
fprintf(‘a = %7.6f b = %7.6f f(a) = %7.6f f(b) = %7.6f \n’, a, b, fa, fb)
fprintf(‘number of iterations = %2d \n’,k)
44
goldensectionsearch(‘profitfunction’,[50 70], 0.01)
a = 59.451781 b = 59.460843 f(a) = -19195305.961470 f(b) =
-19195305.971921
number of iterations = 16
Finally, we demonstrate the use of fminbnd to determine the optimum value of the flowrate:
x = fminbnd(‘profitfunction’, 50, 70,optimset(‘Display’,‘iter’))
Func-count x f(x) Procedure
1 57.6393 -1.91901e+007 initial
2 62.3607 -1.91828e+007 golden
3 54.7214 -1.91585e+007 golden
4 59.5251 -1.91953e+007 parabolic
5 59.4921 -1.91953e+007 parabolic
6 59.458 -1.91953e+007 parabolic
7 59.4567 -1.91953e+007 parabolic
8 59.4567 -1.91953e+007 parabolic
9 59.4567 -1.91953e+007 parabolic
Optimization terminated:
the current x satisfies the termination criteria using OPTIONS.TolX of
1.000000e-004
x=
59.4567
500
Nonlinear model regression and optimization
derivatives with respect to each of the n variables exist, then the gradient of the function,
rf xðÞ, exists and is equal to a vector of partial derivatives as follows:
rf xðÞ¼
∂f
∂x
1
∂f
∂x
2
:
:
:
∂f
∂x
n
2
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
5
: (8:6)
The gradient vector evaluated at x
0
, points in the direction of the largest rate of
increase in the function at that point. The negative of the gradient vector rf x
0
ðÞ
points in the direction of the greatest rate of decrease in the function at x
0
. The
gradient vector plays a very important role in derivative-based minimization algo-
rithms since it provides a search direction at each iteration for finding the next
approximation of the minimum.
If the gradient of the function fðxÞ at any point x* is a zero vector (all components
of the gradient vector are equal to zero), then x* is a critical point. If fðxÞf x
ðÞfor
all x in the vicinity of x*, then x* is a local minimum. If fðxÞf x
ðÞ, for all x in the
neighborhood of x*, then x* is a local maximum. If x* is neither a minimum nor a
maximum point, then it is called a saddle point (similar to the inflection point of a
single-variable nonlinear function).
The nature of the critical point can be established by evaluating the matrix of
second partial derivatives of the nonlinear objective function, which is called the
Hessian matrix. If the second partial derivatives ∂
2
f=∂x
i
∂x
j
of the function exist for
all paired combinations i, j of the variables, where i, j =1,2, ..., n, then the Hessian
matrix of the function is defined as
HxðÞ¼
∂
2
f
∂x
2
1
∂
2
f
∂x
1
∂x
2
...
∂
2
f
∂x
1
∂x
n
∂
2
f
∂x
2
∂x
1
∂
2
f
∂x
2
2
...
∂
2
f
∂x
2
∂x
n
:
:
:
∂
2
f
∂x
n
∂x
1
∂
2
f
∂x
n
∂x
2
...
∂
2
f
∂x
2
n
2
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
5
: (8:7)
The Hessian matrix of a multivariable function is analogous to the second derivative
of a single-variable function. It can also be viewed as the Jacobian of the gradient
vector rfðxÞ. (See Section 5.7 for a definition of the Jacobian of a system of
functions.) HxðÞis a symmetric matrix, i.e. a
ij
¼ a
ji
, where a
ij
is the element from
the ith row and the jth column of the matrix.
A critical point x* is a local minimum if Hx
ðÞis positive definite. A matrix A is
said to be positive definite if A is symmetric and x
T
Ax
4
0 for all non-zero vectors x.
2
Note the following properties of a positive definite matrix.
(1) The eigenvalues λ
i
(i =1,2, ..., n) of a positive definite matrix are all positive.
Remember that an eigenvalue is a scalar quantity that satisfies the matrix equation
A lI ¼ 0. A positive definite matrix of size n
×
n has n distinct real eigenvalues.
(2) All elements along the main diagonal of a positive definite matrix are positive.
2
The T superscript represents a transpose operation on the vector or matrix.
501
8.3 Unconstrained multivariable optimization

(3) The determinant of each leading principal minor is positive. A principal minor of
order j is a minor obtained by deleting from an n
×
n square matrix, n – j pairs of rows
and columns that intersect on the main diagonal (see the definition of a minor in
Section 2.2.6). In other words, the index numbers of the rows deleted are the same as
the index numbers of the columns deleted. A leading principal minor of order j is a
principal minor of order j that contains the first j rows an d j columns of the n × n
square matrix. A 3 × 3 matrix has three principal minors of order 2:
a
11
a
12
a
21
a
22
;
a
11
a
13
a
31
a
33
;
a
22
a
23
a
32
a
33
:
Of these, the first principal minor is the leading principal minor of order 2 since it
contains the first two rows and columns of the matrix. An n × n square matrix has n
leading principal minors. Can you list the three leading principal minors of a 3 × 3
matrix?
To ascertain the positive definiteness of a matrix, one needs to show that either the
first property in the list above is true or that both properties (2) and (3) hold true
simultaneously.
A critical point x* is a local maximum if Hx
ðÞis negative definite. A matrix A is
said to be negative definite if A is symmetric and x
T
Ax
5
0 for all non-zero vectors x.
A negative definite matrix has negative eigenvalues, diagonal elements that are all
less than zero, and leading principal minors that all have a negative determinant. In
contrast, at a saddle point, the Hessian matrix is neither positive definite nor
negative definite.
A variety of search methods for unconstrained multidimensional optimization
problems have been developed. The general procedure of most multivariable opti-
mization methods is to (1) determine a search direction and (2) find the minimum
value of the function along the line that passes through the current point and runs
parallel to the search direction. Derivative-based methods for multivariable mini-
mization are called indirect search methods because the analytical form (or numerical
form) of the partial derivatives of the function must be determined and evaluated at
the initial guessed values before the numerical step can be applied. In this section we
present two indirect methods of optimization: the steepest descent method
(Section 8.3.1) and Newton’s method for multidimensional search (Section 8.3.2).
The latter algorithm requires calculation of the first and second partial derivatives of
the objective function at each step, while the former requires evaluation of only the
first partial derivatives of the function at the approximation x
i
to provide a new
search direction at each step. In Section 8.3.3, the simplex method based on the
Nelder–Mead algorithm is discussed. This is a direct search method that evaluates
only the function to proceed towards the minimum.
8.3.1 Steepest descent or gradient method
In the steepest descent method, the negative of the gradient vector evaluated at x
provides the search direction at x. The negative of the gradient vector points in the
directionofthelargestrateofdecreaseoffðxÞ. If the first guessed point is x
ð0Þ
,thenext
point x
ð1Þ
lies on the line x
ð0Þ
αrf x
ð0Þ
,whereα is the step size taken in the search
direction from x
ð0Þ
. A minimization search is carried out to locate a point on this line
where the function has the least value. This type of one-dimensional search is called a
line search and involves the optimization of a single variable α. The next point is given by
502
Nonlinear model regression and optimization

x
ð1Þ
¼ x
ð0Þ
αrf x
ð0Þ
: (8:8)
In Equation (8.8) the second term on the right-hand side is the incremental step
taken, or Δx ¼αrf x
ð0Þ
. Once the new point x
ð1Þ
is obtained, a new search
direction is calculated by evaluating the gradient vector at x
ð1Þ
. The search pro-
gresses along this new direction, and stops when α
opt
is found, which minimizes the
function value along the second search line. The function value at the new point
should be less than the function value at the previous point, or f x
ð2Þ
5
f x
ð1Þ
and
f x
ð1Þ
5
f x
ð0Þ
. This procedure continues iteratively until the partial derivatives of
the function are all very close to zero and/or the distance between two consecutive
points is less than the tolerance limit . When these criteria are fulfilled, a local
minimum of the function has been reached.
Algorithm for the method of steepest descent
(1) Choose an initial point x
ðkÞ
. In the first iteration, the initial guessed point is x
ð0Þ
.
(2) Determine the analytical form (or numerical value using finite differences, a topic
that is briefly discussed in Section 1.6.3) of the partial derivatives of the function.
(3) Evaluate rf xðÞat x
ðkÞ
. This provides the search direction s
ðkÞ
.
(4) Perform a single-variable optimization to minimize f x
ðkÞ
þ αs
ðkÞ
using any of the
one-dimensional minimization methods discussed in Section 8.2.
(5) Calculate the new point x
ðkþ1Þ
¼ x
ðkÞ
þ αs
ðkÞ
.
(6) Repeat steps (3)–(5) until the procedure has converged upon the minimum value.
Since the method searches for a critical point, it is possible that the iteratio ns may
converge upon a saddle point. Therefore, it is important to verif y the nature of the
critical point by confirming whether the Hessian matrix evaluated at the final point is
positive or negative definite .
An advantage of the steepest descent method is that a good initial approximation
to the minimum is not required for this method to proceed towards a critical point.
However, a drawback of this method is that the step size in each subsequent search
direction becomes smaller as the minimum is approached. As a result, many steps are
usually required to reach the minimum, and the rate of convergence slows down as
the minimum point nears.
There are a number of varian ts to the steepest descent method that differ in the
technique employed to obtain the search direction, such as the conjugate gradient
method and Powell’s method. These methods are discussed in Edgar and
Himmelblau (1988).
Example 8.1
Using the steepest descent method, find the values of x and y that minimize the function
fx; yðÞ¼x e
xþy
þ y
2
: (8:9)
To get a clearer picture of the behavior of the function, we draw a contour plot in MATLAB. This
two-dimensional graph displays a number of contour levels of the function on an x–y plot. Each contour
line is assigned a color according to a coloring scheme such that one end of the color spectrum
(red) is associated with large values of the function and the other end of the color spectrum (blue) is
associated with the smallest values of the function observed in the plot. A contour plot is a convenient
tool that can be used to locate valleys (minima), peaks (maxima), and saddle points in the variable space
of a two-dimensional nonlinear function.
503
8.3 Unconstrained multivariable optimization
To make a contour plot, you first need to create two matrices that contain the values of each of the
two independent variables to be plotted. To construct these matrices, you use the meshgrid function,
which creates two matrices, one for x and one for y, such that the corresponding elements of each
matrix represent one point on the two-dimensional map. The MATLAB function contour plots the
contour map of the function. Program 8.6 shows how to create a contour plot for the function given in
Equation (8.9) .
MATLAB program 8.6
% Plots the contour map of the function x*exp(x + y) + y^2
[x, y] = meshgrid(-3:0.1:0, -2:0.1:4);
z = x.*exp(x + y) + y.^2;
contour(x, y, z, 100);
set(gca, ‘Line Width’,2,‘Font Size’,16)
xlabel(‘x’,‘Fontsize’,16)
ylabel(‘y’,‘Fontsize’,16)
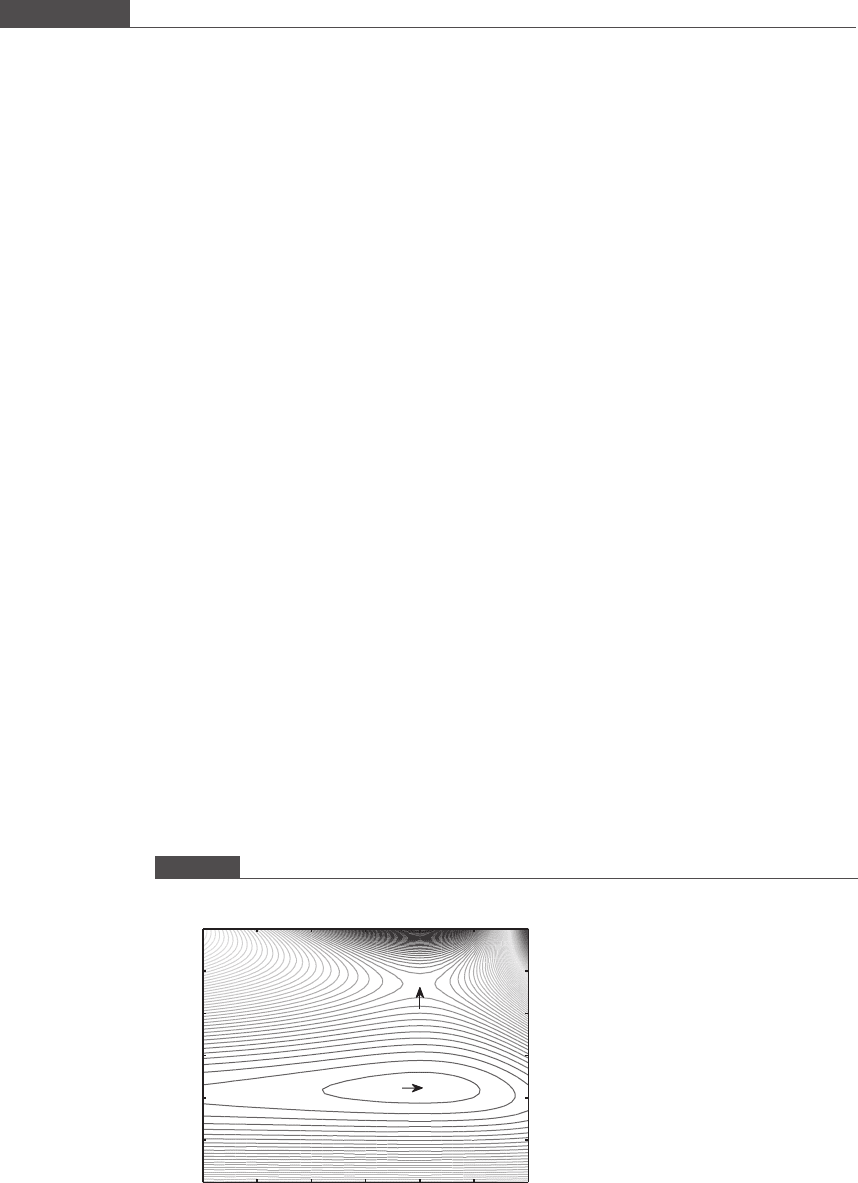
Figure 8.9 is the contour plot created by Program 8.6, with text labels added. In the variable space that
we have chosen, there are two critical points, of which one is a saddle point. The other critical point is a
minimum. We can label the contours using the clabel function. Accordingly, Program 8.6 is modified
slightly, as shown below in Program 8.7.
MATLAB program 8.7
% Plots a contour plot of the function x*exp(x + y) + y^2 with labels.
[x, y] = meshgrid(-3:0.1:0, -1:0.1:1.5);
z = x.*exp(x + y) + y.^2;
[c, h] = contour(x, y, z, 15);
clabel(c, h)
set(gca, ‘Line Width’,2,‘Font Size’,16)
xlabel(‘x’,‘Fontsize’,16)
ylabel(‘y’,‘Fontsize’,16)
Figure 8.9
Contour plot of the function given in Equation (8.9)
x
y
−3 −2.5 −2 −1.5 −1 −0.5 0
−2
−1
0
1
2
3
4
saddle point
minimum
504
Nonlinear model regression and optimization
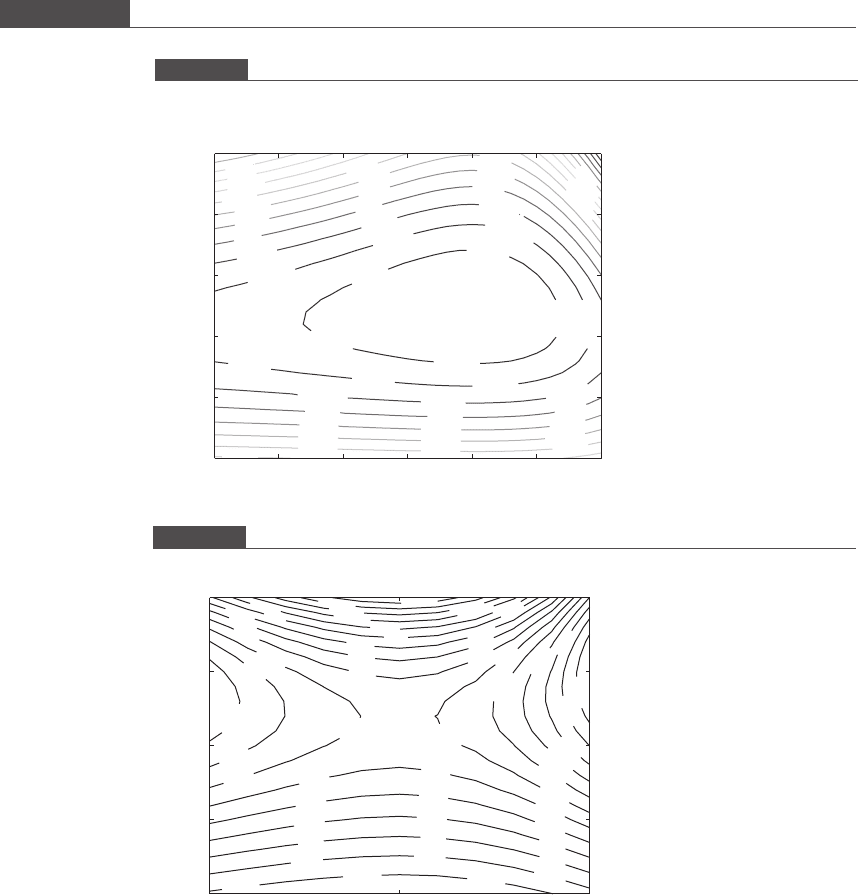
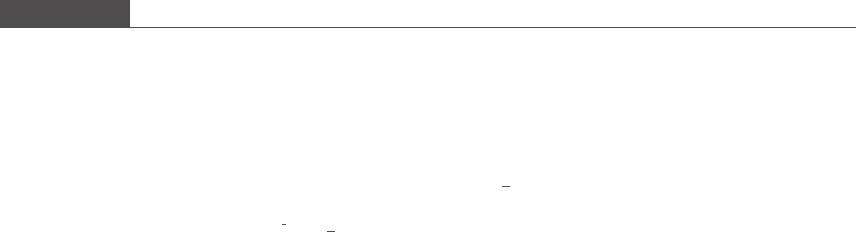
The resulting plot is shown in Figure 8.10. The second critical point is a minimum. A labeled contour plot
that shows the behavior of the function at the saddle point is shown in Figure 8.11. Study the shape of the
function near the saddle point. Can you explain how this type of critical point got the name “saddle”?
3
Taking the first partial derivatives of the function with respect to x and y, we obtain the following analytical
expression for the gradient:
rfx; yðÞ¼
ð1 þ xÞe
xþy
xe
xþy
þ 2y
:
We begin with an initial guess value of x
ð0Þ
¼ð1; 0Þ:
Figure 8.10
Contour plot of the function given by Equation (8.9) showing the function values at different contour levels near the
minimum point
−0.24312
−0.24312
−0.24312
−0.24312
−0.24312
−0.076913
−0.076913
−0.076913
−
0.076913
−0.076913
−0.076913
−0.076913
0.089295
0.089295
0.089295
0.089295
0.089295
0.089295
0.2555
0.2555
0.2555
0.2555
0.2555
0.2555
0.42171
0.42171
0.42171
0.42171
0.42171
0.42171
0.58792
0.58792
.792
0.58792
0.58792
0.58792
0.75413
0.75413
0.75413
0.75413
0.75413
0.75413
0 92034
0.92034
0.92034
1.0865
1.0865
1.2528
1.252 8
1.41
x
y
−3 −2.5 −2 −1.5 −1 −0.5 0
−1
−0.5
0
0.5
1
1.5
Figure 8.11
The behavior of the function at the saddle point
0.24508
0.42266
0.60024
0.60024
0.77782
0.77782
0.77782
0.77782
0.77782
0.9554
0.9554
0.9554
0.9554
0.9554
0.9554
1.133
1.133
1.133
1.133
1.133
1.133
1.3106
1.3106
1.3106
1.3106
1.3106
1.3106
1.4881
1.4881
1.4881
1.4881
1.4881
1.4881
1.6657
1.6657
1.6657
1.6657
1.6657
1.6657
1.8433
1.8433
1.8433
1.8433
1.8433
1.8433
2.0209
2.0209
2.0209
2.0209
2.1984
2.1984
2.198
4
2.376
2.376
2.5536
2.7312
x
y
−1.5 −1 −0.5
1.5
2
2.5
3
3.5
3
Use the command surf(x, y, z) in MATLAB to reveal the shape of this function in two variables.
This might help you to answer the question.
505
8.3 Unconstrained multivariable optimization
rf 1; 0ðÞ¼
0
1=e
Next we minimize the function:
f x
0ðÞ
αrf x
0ðÞ
¼ f 1 0 α; 0
α
e
¼e
1þ
α
e
ðÞ
þ
α
e
2
:
The function to be minimized is reduced to a single-variable function. Any one-dimensional minimization
method, such as successive parabolic interpolation, golden section search, or Newton’s method can be
used to obtain the value of α that minimizes the above expression.
We use successive parabolic interpolation to perform the single-variable minimization. For this purpose,
we create a MATLAB function program that calculates the value of the function f αðÞat any value of α.To
allow the same function m-file to be used for subsequent iterations, we generalize it by passing the values
of the current guess point and the gradient vector to the function.
MATLAB program 8.8
function f = xyfunctionalpha(alpha, x, df)
% Calculates the function f(x-alpha*df)
% Input variables
% alpha : scalar value of the step size
% x : vector that specifies the current guess point
% df : gradient vector of the function at x
f = (x(1)-df(1)*alpha)*exp(x(1)-df(1)*alpha + x(2)-df(2)*alpha) + ...
(x(2) - df(2)*alpha)^2;
Program 8.3, which lists the function m-file that performs a one-dimensional minimization using the
parabolic interpolation method, is slightly modified so that it can be used to perform our line search. In this
user-defined function, the guessed point and the gradient vector are added as input parameters and the
function is renamed as steepestparabolicinterpolation (see Program 8.10). We type the
following in the Command Window:
44
steepestparabolicinterpolation(‘xyfunctionalpha’, [0 10],0.01,
[−1, 0], [0, −exp(−1)])
The output is
x0 = 0.630535 x2 = 0.630535 f(x0) = −0.410116 f(x2) = −0.410116
x_min = 0.630535 f(x_min) = −0.410116
number of iterations = 13
The optimum value of α is found to be 0.631, at which the function value is −0.410. The new point x
ð1Þ
is
(−1, 0.232). The gradient at this point is calculated as
rf 1; 0:232ðÞ¼
0
6 10
5
:
The gradient is very close to zero. We conclude that we have reached the minimum point in a single
iteration. Note that the excellent initial guessed point and the behavior of the gradient at the initial guess
contributed to the rapid convergence of the algorithm.
506
Nonlinear model regression and optimization