King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.


We can automate the steepest descent algorithm by creating an m-file that iteratively calculates
the gradient of the function and then passes this value along with the guess point to
steepestparabolicinterpolation. Program 8.9 is a function that minimizes the
multivariable function using the line search method of steepest descent. It calls Program 8.10 to
perform one-dimensional minimization of the function along the search direction by optimizing α.
MATLAB program 8.9
function steepestdescent(func, funcfalpha, x0, toldf)
% Performs unconstrained multivariable optimization using the steepest
% descent method
% Input variables
% func: calculates the gradient vector at x
% funcfalpha: calculates the value of f(x-alpha*df)
% x0: initial guess point
% toldf: tolerance for error in gradient
% Other variables
maxloops = 20;
ab = [0 10]; % smallest and largest values of alpha
tolalpha = 0.001; % tolerance for error in alpha
df = feval(func, x0);
% Miminization algorithm
for i = 1:maxloops
alpha = steepestparabolicinterpolation(funcfalpha, ab, ...
tolalpha, x0, df);
x1 = x0 - alpha*df;
x0 = x1;
df = feval(func, x0);
fprintf(‘at step %2d, norm of gradient is %5.4f \n’,i, norm(df))
if norm(df) < toldf
break
end
end
fprintf(‘number of steepest descent iterations is %2d \n’,i)
fprintf(‘minimum point is %5.4f, %5.4f \n’,x1)
MATLAB program 8.10
function alpha = steepestparabolicinterpolation(func, ab, tolx, x, df)
% Successive parabolic interpolation is used to find the minimum
% of a unimodal function.
% Input variables
% func: nonlinear function to be minimized
% ab : initial bracketing interval [a, b]
% tolx: tolerance in estimating the minimum
% x : guess point
% df : gradient vector evaluated at x
507
8.3 Unconstrained multivariable optimization

% Other variables
k = 0; % counter
maxloops = 20;
% Set of three points to construct the parabola
x0 = ab(1);
x2 = ab(2);
x1 = (x0 + x2)/2;
% Function values at the three points
fx0 = feval(func, x0, x, df);
fx1 = feval(func, x1, x, df);
fx2 = feval(func, x2, x, df);
% Iterative solution
while (x2 - x0) > tolx
% Calculate minimum point of parabola
numerator = (x2^2 - x1^2)*fx0 - (x2^2 - x0^2)*fx1 + (x1^2 - x0^2)*fx2;
denominator = 2*((x2 - x1)*fx0 - (x2 - x0)*fx1 + (x1 - x0)*fx2);
xmin = numerator/denominator;
% Function value at xmin
fxmin = feval(func, xmin, x, df);
% Select set of three points to construct new parabola
if xmin < x1
if fxmin < fx1
x2 = x1;
fx2 = fx1;
x1 = xmin;
fx1 = fxmin;
else
x0 = xmin;
fx0 = fxmin;
end
else
if fxmin < fx1
x0 = x1;
fx0 = fx1;
x1 = xmin;
fx1 = fxmin;
else
x2 = xmin;
fx2 = fxmin;
end
end
k=k+1;
if k > maxloops
break
end
end
alpha = xmin;
fprintf(‘x0 = %7.6f x2 = %7.6f f(x0) = %7.6f f(x2)= %7.6f \n’, x0, x2, fx0, fx2)
508
Nonlinear model regression and optimization

fprintf(‘x_min = %7.6f f(x_min) = %7.6f \n’,xmin, fxmin)
fprintf(‘number of parabolic interpolation iterations = %2d \n’,k)
Using an initial guessed point of (−1, 0) and a tolerance of 0.001, we obtain the following solution:
44
steepestdescent(‘xyfunctiongrad’,‘xyfunctionalpha’ ,[−1, 0],
0.001)
x0 = 0.630535 x2 = 0.630535 f(x0) = −0.410116 f(x2) = −0.410116
x_min = 0.630535 f(x_min) = −0.410116
number of parabolic interpolation iterations = 13
at step 1, norm of gradient is 0.0000
number of steepest descent iterations is 1
minimum point is −1.0000, 0.2320
Instead if we start from the guess point (0, 0), we obtain the output
x0 = 0.000000 x2 = 1.000812 f(x0) = 0.000000 f(x2) = −0.367879
x_min = 1.000520 f(x_min) = −0.367879
number of parabolic interpolation iterations = 21
at step 1, norm of gradient is 0.3679
x0 = 0.630535 x2 = 0.630535 f(x0) = −0.410116 f(x2) = −0.410116
x_min = 0.630535 f(x_min) = −0.410116
number of parabolic interpolation iterations = 13
at step 2, norm of gradient is 0.0002
number of steepest descent iterations is 2
minimum point is -1.0004, 0.2320
8.3.2 Multidimensional Newton’s method
Newton’s method approximates the multivariate function with a second-order
approximation. Expanding the function about a point x
0
using a multidimensional
Taylor seri es, we have
f xðÞf x
0
ðÞþr
T
f x
0
ðÞx x
0
ðÞþ
1
2
x x
0
ðÞ
T
Hx
0
ðÞx x
0
ðÞ;
where r
T
f x
0
ðÞis the transpose of the gradient vector. The quadratic approximation
is differentiated with respect to x and equated to zero. Thi s yields the following
approximation formula for the minimum:
Hx
0
ðÞΔx ¼rf x
0
ðÞ; (8:10)
where Δx ¼ x x
0
. This method requires the calcul ation of the first and second
partial derivatives of the function. Note the similarity between Equations (8.10) and
(5.37). The iterative technique to find the solution x that minimizes fðxÞ has much in
common with that described in Section 5.7 for solving a system of nonlinear
equations using Newton’s method. Equation (8.10) reduces to a set of linear equa-
tions in Δx. Any of the methods described in Chapter 2 to solve a system of linear
equations can be used to solve Equation (8.10).
Equation (8.10) exactly calculates the minimum x of a quadratic function. An
iterative process is required to minimize general nonlinear functions. If the Hessian
matrix is invertible then we can rearrange the terms in Equation (8.10) to obtain the
iterative formula
x
ðkþ1Þ
¼ x
ðkÞ
Hx
ðkÞ
hi
1
rf x
ðkÞ
: (8:11)
509
8.3 Unconstrained multivariable optimization

In Equation (8.11), Hx
i
ðÞ½
1
rfx
i
ðÞprovides the search (descent) direction. This is
the Newton formula for multivariable minimization. Because the formula is inexact
for a non-quadratic function, we can optimize the step length by adding an addi-
tional parameter α. Equat ion (8.11) becomes
x
ðkþ1Þ
¼ x
ðkÞ
α
k
Hx
ðkÞ
hi
1
rfx
ðkÞ
: (8:12)
In Equation (8.12), the search direction is given by Hx
ðkÞ
1
rf x
ðkÞ
and the step
length is modified by α
k
.
Algorithm for Newton’s multidimensional minimization ( α =1)
(1) Provide an initial estimate x
ðkÞ
of the minimum of the objective function fðxÞ. At the
first iteration, k =0.
(2) Determine the analytical or numerical form of the first and second partial derivatives
of fðxÞ.
(3) Evaluate rfxðÞand HxðÞat Δx
ðkÞ
.
(4) Solve the system of linear equations Hx
ðkÞ
Δx
ðkÞ
¼rf x
ðkÞ
for Δx
kðÞ
.
(5) Calculate the next approximation of the minimum x
kþ1
ðÞ
¼ x
k
ðÞ
þ Δx
k
ðÞ
.
(6) Repeat steps (3)–(5) until the method has converged upon a solution.
Algorithm for modified Newton’s multidimensional minim ization (α ≠ 1)
(1) Provide an initial estimate x
ðkÞ
of the minimum of the objective function fðxÞ.
(2) Determine the analytical or numerical form of the first and second partial derivatives
of fðxÞ.
(3) Calculate the search direction s
ðkÞ
¼Hx
ðkÞ
1
rf x
ðkÞ
.
(4) Perform single-parameter optimization to determine the value of α
k
that minimizes
f x
ðkÞ
þ α
k
s
ðkÞ
.
(5) Calculate the next approximation of the minimum x
kþ1ðÞ
¼ x
ðkÞ
þ α
k
s
ðkÞ
.
(6) Repeat steps (3)–(5) until the method has converged upon a solution.
When the method has converged upon a solution, it is necessary to check if the
point is a local minimum. This can be done either by determining if H evaluated at
the solution is positive definite or by perturbing the solution slightly along multiple
directions and observing if iterative optimization recovers the solution each time. If
the point is a saddle point, perturbation of the solution and subsequent optimization
steps are likely to lead to a solution corresponding to some other critical point.
Newton’s method has a quadratic convergence rate and thus minimizes a function
faster than other methods, when the initial guessed point is close to the minimum.
Some difficul ties encountered with using Newton’s method are as follows.
(1) A good initial approximation close to the minimum point is required for the method
to demonstrate convergence.
(2) The first and second partial derivatives of the objective function should exist. If the
expressions are too complicated for evaluation, finite difference approximations
may be used in their place.
(3) This method may converge to a saddle point. To ensure that the method is not
moving towards a saddle point, it should be verified that Hx
ðkÞ
is positive definite
at each step. If the Hessian matrix evaluated at the current point is not positive
definite, the minimum of the function will not be reached. Techniques are available
510
Nonlinear model regression and optimization

to force the Hessian matrix to remain positive definite so that the search direction
will lead to improvement (reduction) in the function value at each step.
The advantages and drawbacks of the method of steepest descent and Newton’s
method are complementary. An efficient and popular minimization algorithm is the
Levenberg–Marquart method, which combines the two techniques in such a way
that minimization begins with steepest descent. When the minimum point is near
(e.g. Hessian is positive definite), convergence slow s down , and the iterative routi ne
switches to Newton’s method, producing a more rapid convergence.
Using MATLAB
Optimization Toolbox contains the built-in function fminunc that searches for the
local minimum of a multivariable objective function. This function operates on two
scales. It has a large-scale algorithm that is suited for an unconstrained optimization
problem consisting of many variables. The medium-scale algorithm should be chosen
when optimizing a few variables. The latter algorithm is a line search method that
calculates the gradient to provide a search direction. It uses the quasi-Newton method
to approximate and update the Hessian matrix, whose inverse is used along with the
gradient to obtain the search direction. In the quasi-Newton method, the behavior of
the function fðxÞand its gradient rfðxÞ is used to determine the form of the Hessian at
x. Newton’s method, on the other hand, calculates H directly from the second partial
derivatives. Gradient methods, and therefore the fminunc function, should be used
when the function derivative is continuous, since they are more efficient.
The default algorithm is large-scale. The large-scale algorithm approximates the
objective function with a simpler function and then establishes a trust region within
which the function minimum is sought. The second partial derivatives of the objec-
tive function can be made available to fminunc by calculating them along with the
objective function in the user-defined functi on file. If the options structure
instructs fminunc to use the user-supplied Hessian matrix, these are used in place
of the numerical approximations generated by the algorithm to approximate the
Hessian. Only the large-scale algorithm can use the user-supplied Hessian matrix
calculations, if provided. Note that calculating the gradient rfðxÞ along with the
function fðxÞ is optional when using the medium-scale algorithm but is required
when using the large-scale algorithm.
One form of the syntax is
x = fminunc(func, x0, options)
x
0
is the initial guess value and can be a scalar, vector, or matrix. Use of optimset
to construct an options structure was illustrated in Section 8.2.3. Options can be
used to set the tolerance of x, to set the tolerance of the function value, to specify use
of user-supplied gradient calculations, to specify use of user-supplied Hessian cal-
culations, whether to proceed with the large-scale or medium-scale algorithm by
turning “LargeScale” on or off, and various other specifics of the algorithm. To
tell the function fminunc that func also returns the gradient and the Hessian
matrix along with the scalar function value, create the following structure:
options = optimset(‘GradObj’, ‘ on’, ‘Hessian’, ‘on’)
to be passed to fminunc.Whenfunc supplies the first partial derivatives and the
second partial derivatives at x along with the function value, it should have three
511
8.3 Unconstrained multivariable optimization

output arguments in the following order: the scalar-valued function, the gradient
vector, followed by the Hessian matr ix (see Example 8.2). See help fminunc for
more details.
Example 8.2
Minimize the function given in Equation (8.9) using multidimensional Newton’s method.
The analytical expression for the gradient was obtained in Example 8.1 as
rfx; yðÞ¼
ð1 þ xÞe
xþy
xe
xþy
þ 2y
:
The Hessian of the function is given by
Hx; yðÞ¼
2 þ xðÞe
xþy
1 þ xðÞe
xþy
1 þ xðÞe
xþy
xe
xþy
þ 2
:
MATLAB Program 8.11 performs multidimensional Newton’s optimization, and Program 8.12 is a function
that calculates the gradient and Hessian at the guessed point.
MATLAB program 8.11
function newtonsmulti Doptimization(func, x0, toldf)
% Newton’s method is used to minimize a multivariable objective function.
% Input variables
% func : calculates gradient and Hessian of nonlinear function
% x0 : initial guessed value
% toldf : tolerance for error in norm of gradient
% Other variables
maxloops = 20;
[df, H] = feval(func,x0);
% Minimization scheme
for i = 1:maxloops
deltax = - H\df; % df must be a column vector
x1 = x0 + deltax;
[df, H] = feval(func,x1);
if norm(df) < toldf
break % Jump out of the for loop
end
x0 = x1;
end
fprintf(‘number of multi-D Newton’’s iterations is %2d \n’,i)
fprintf(‘norm of gradient at minimum point is %5.4f \n’, norm(df))
fprintf(‘minimum point is %5.4f, %5.4f \n’,x1)
MATLAB program 8.12
function [df, H] = xyfunctiongradH(x)
% Calculates the gradient and Hessian of f(x)= x*exp (x + y) + y^2
df = [(1 + x(1))*exp(x(1) + x(2)); x(1)*exp(x(1) + x(2)) + 2*x(2)];
512
Nonlinear model regression and optimization
H = [(2 + x(1))*exp(x(1) + x(2)), (1 + x(1))*exp(x(1) + x(2)); ...
(1 + x(1))*exp(x(1) + x(2)), x(1)*exp(x(1) + x(2)) + 2];
We choose an initial point at (0, 0), and solve the optimization problem using our optimization function
developed in MATLAB:
44
newtonsmultiDoptimization(‘xyfunctiongradH’, [0; 0], 0.001)
number of multi-D Newton’s iterations is 4
norm of gradient at minimum point is 0.0001
minimum point is -0.9999, 0.2320
We can also solve this optimization problem using the fminunc function. We create a function that
calculates the value of the function, gradient, and Hessian at any point x.
MATLAB program 8.13
function [f, df, H] = xyfunctionfgradH(x)
% Calculates the valve, gradient, and Hessian of
% f(x) = x*exp(x + y) + y^2
f = x(1)*exp(x(1) + x(2)) + x(2)^2;
df = [(1 + x(1))*exp(x(1) + x(2)); x(1)*exp(x(1)+ x(2)) + 2*x(2)];
H = [(2 + x(1))*exp(x(1) + x(2)), (1 + x(1))*exp(x(1)+ x(2)); ...
(1 + x(1))*exp(x(1) + x(2)), x(1)*exp(x(1) + x(2)) + 2];
Then
44
options = optimset(‘GradObj’,‘on’,‘Hessian’,‘on’);
44
fminunc(‘xyfunctionfgradH’,[0; 0], options)
gives us the output
Local minimum found.
Optimization completed because the size of the gradient is less than
the default value of the function tolerance.
ans =
−1.0000
0.2320
8.3.3 Simplex method
The simplex method is a direct method of minimization since only function evalua-
tions are required to proceed iteratively towards the minimum point. The method
creates a geometric shape called a simplex. The simplex has n + 1 vertices, where n is
the number of variables to be optimized. At each iteration, one point of the simplex is
discarded and a new point is added such that the simplex gradually moves in the
variable space towards the minimum. The original simplex algorithm was devised by
Spendley, Hext, and Himsworth, according to which the simplex was a regular
geometric structure (with all sides of equal lengths). Nelder and Mead developed a
more efficient simplex algorithm in which the location of the new vertex, and the
location of the other vertices, may be adjusted at each iteration, permitting the
simplex shape to expand or contract in the variable space. The Nelder–Mead simplex
structure is not necessarily regular after each iteration. For a two-dimensional
optimization problem, the simplex has the shape of a triangle. The simplex takes
the shape of a tetrahedron or a pyramid for a three-parameter optimization problem.
513
8.3 Unconstrained multivariable optimization
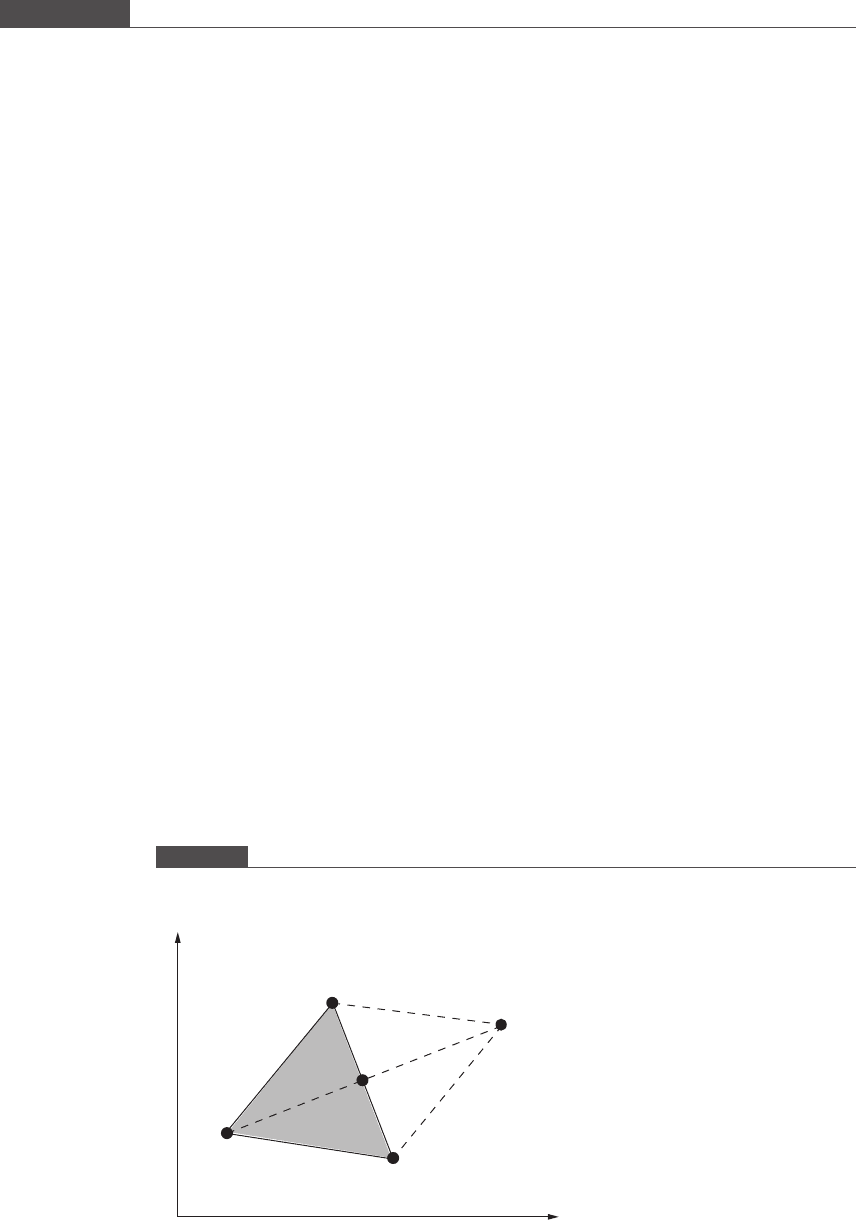
We illustrate the simplex algorithm for the two-dimensional optimization problem.
Three points in the variable space are chosen such that the lines connecting the points
are equal in length, to generate an equilateral triangle. We label the three vertices
according to the function value at each vertex. The vertex with the smallest function
value is labeled G (for good); the vertex with an intermediate function value is labeled
A (for average); and the vertex with the largest function value is labeled B (for bad).
The goal of the simplex method, when performing a minimization, is to move
downhill, or away, from the region where the function values are large and towards
the region where the function values are smaller. The function values decrease in the
direction from B to G and from B to A. Therefore, it is likely that even smaller values
of the functi on will be encountered if one proceeds in this direction. To advance in
this direction, we locate the mirror image of point B across the line GA . To do this
the midpoint M on the line GA is located. A line is drawn that connects M with B,
which has a width w. This line is extended past M to a point S such that the width of
the line BS is 2w. See Figure 8.12.
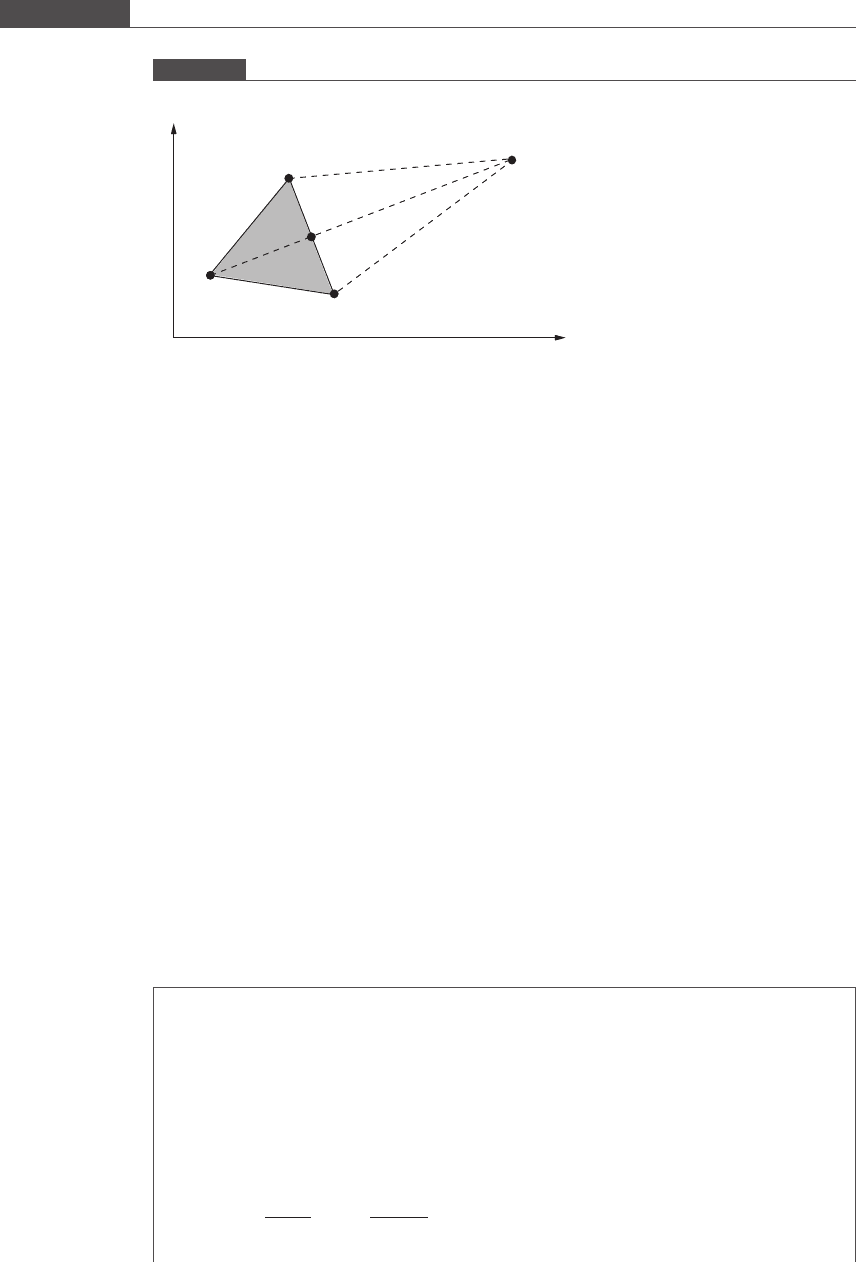
The function value at S is computed. If f SðÞ
5
fðGÞ, then the point S is a significant
improvement over the point B. It may be possible that the minimum lies further
beyond S. The line BS is extended further to T such that the width of MT is 2w and
BT is 3w (see Figure 8.13). If f TðÞ
5
fðSÞ, then further improvement has been made in
the selection of the new vertex, and T is the new vertex that replaces B.Iff TðÞ
4
fð
SÞ,
then point S is
retained and T is discarded.
On the other hand, if f SðÞfðBÞ, then no improvement has resulted from the
reflection of B across M. The poin t S is discarded and another point C, located at a
distance of w/2 from M along the line BS, is selected and tested. If f CðÞfðBÞ, then
point C is discarded. Now the original simplex shape must be modified in order to
make progress. The lengths of lines GB and GA contrac t as the points B and A are
retracted towards G. After shrinking the triangle, the algorithm is retried to find a
new vertex.
A new simplex is generated at each step such that there is an improvement
(decrease) in the value of the function at one vertex point. When the minimum is
approached, in order to fine-tune the estimate of its location, the size of the simplex
(triangle in two-dimensional space) must be reduced.
Figure 8.12
Construction of a new triangle GSA (simplex). The original triangle is shaded in gray. The line BM is extended beyond M
by a distance equal to w
B
A
G
S
M
w
w
x
1
x
2
514
Nonlinear model regression and optimization
Because the simplex method only performs function evaluations, it does not make
any assumptions regarding the smoothness of the function and its differentiability
with respect to each variable. Therefore, this method is preferred for use with
discontinuous or non-smooth functions. Moreover, since partial derivative calcu-
lations are not required at any step, direct methods are relatively easy to use.
Using MATLAB
MATLAB’s built-in function fminsearch uses the Nelder–Mead implementation
of the simplex method to search for the unconstrained minimum of a function. This
function is well suited for optimizing multivariable problems whose objective func-
tion is not smooth or is discontinuous. This is because the fminsearch routine only
evaluates the objective function and does not calculate the gradient of the function.
The syntax is
x = fminsearch(func, x0)
or
[x, f] = fminsearch(func, x0, options)
The algorithm uses the initial guessed value x
0
to construct n additional points,
and 5% of ea ch element of x
0
is added to x
0
to derive the n + 1 vertices of the
simplex. Note that func is the handle to the function that calculates the scalar value
of the objective function at x. The function output is the value of x that minimizes
func, and, optionally, the value of func at x.
Figure 8.13
Nelder–Mead’s algorithm to search for a new vertex. The point T may be an improvement over S
B
A
G
M
w
2w
x
1
x
2
T
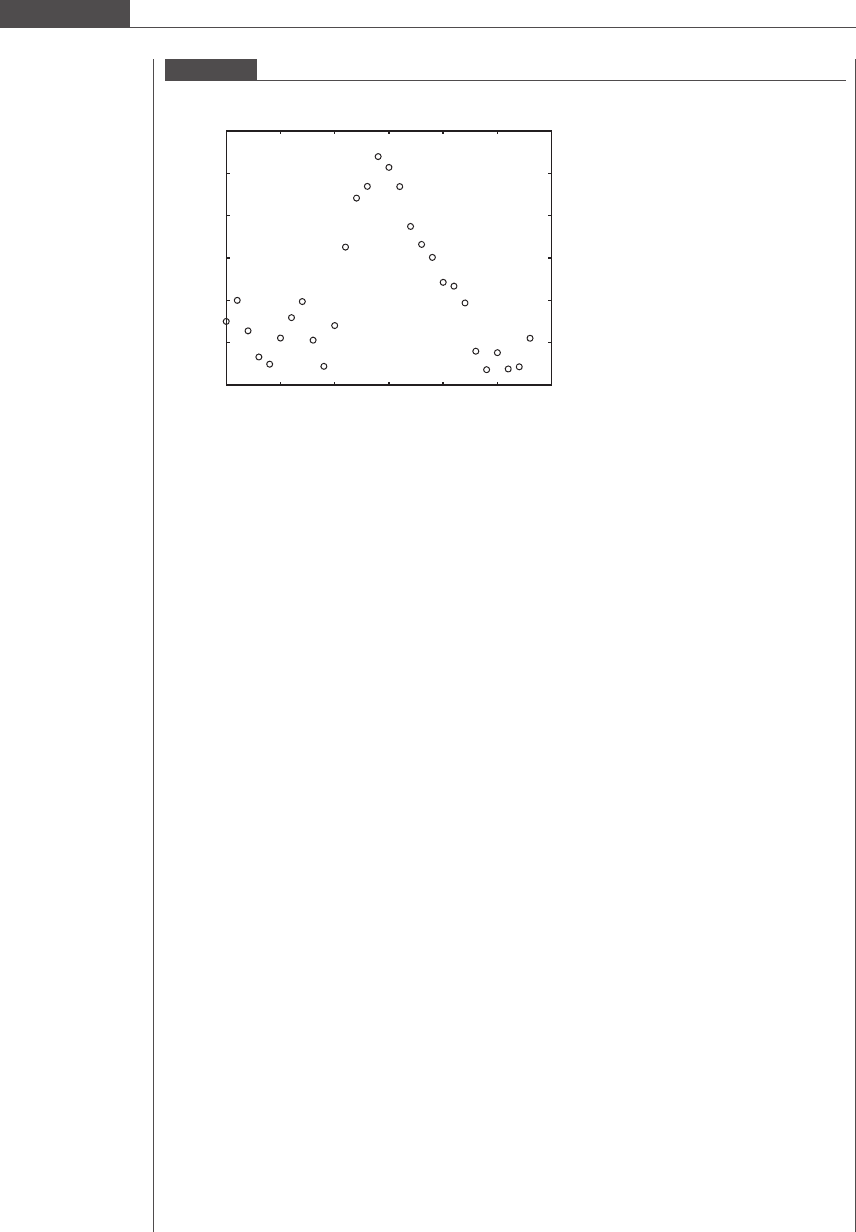
Box 8.3 Nonlinear regression of pixel intensity data
We wish to study the morphology of the cell synapse in a cultured aggregate of cells using immuno-
fluorescence microscopy. Cells are fixed and labeled with a fluorescent antibody against a protein
known to localize at the boundary of cells. When the pixel intensities along a line crossing the cell
synapse are measured, the data in Figure 8.14 are produced.
We see a peak in the intensity near x = 15. The intensity attenuates to some baseline value (I ~
110) in either direction. It was decided to fit these data to a Gaussian function of the following form:
fðxÞ¼
a
1
ffiffiffiffiffiffiffiffi
2πσ
2
p
exp
x μðÞ
2
2σ
2
!
þ a
2
;
515
8.3 Unconstrained multivariable optimization
where a
1
is an arbitrary scaling factor, a
2
represents the baseline intensity, and the other two
model parameters are σ and μ of the Gaussian distribution. In this analysis, the most important
parameter is σ, as this is a measure of the width of the cell synapse and can potentially be used to
detect the cell membranes separating and widening in response to exogenous stimulation. The
following MATLAB program 8.14 and user-defined function were written to perform a nonlinear least
squares regression of this model to the acquired image data using the built-in fminsearch
function.
MATLAB program 8.14
% This program uses fminsearch to minimize the error of nonlinear
% least-squares regression of the unimodal Gaussian model to the pixel
% intensities data at a cell synapse
% To execute this program place the data files into the same directory in
% which this m-file is located.
% Variables
global data % matrix containing pixel intensity data
Nfiles = 4; % number of data files to be analyzed, maximum allowed is 999
for i = 1:Nfiles
num = num2str(i);
if length(num) == 1
filename = [ ‘ data00’,num,’.dat’];
elseif length(num) == 2
filename = [ ‘ data0’,num,’.dat’];
else
filename = [ ‘ data’,num,’.dat’];
end
data = load(filename);
p = fminsearch(‘PixelSSE’,[15,5,150,110]);
Figure 8.14
Pixel intensities exhibited by a cell synapse, where x specifies the pixel number along the cell synapse
0 5 10 15 20 25 30
100
110
120
130
140
150
160
x
Intensity
516
Nonlinear model regression and optimization