Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

391
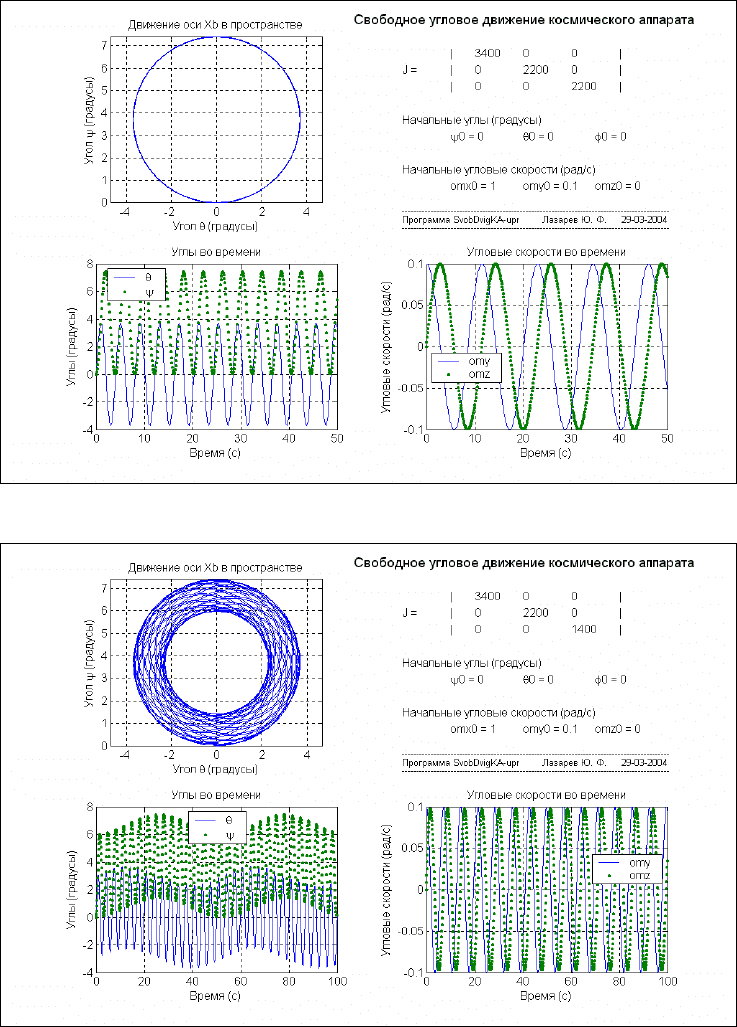
Рис. 9. 24. Свободное движение динамически симметричного КА
Рис. 9. 25. Свободное движение динамически несимметричного КА
392
Рис. 9. 26. Свободное движение динамически несбалансированного КА
Полученные результаты подтверждают выводы теоретического анализа, приведенные в [14].
9.3. Моделирование управляемого углового движения космическо-
го аппарата
Перейдем теперь к созданию модели управляемого движения КА по углам ориентации. Задачей управ-
ления будем полагать приведение КА в некоторое неподвижное в инерциальном пространстве положение.
Для обеспечения управления следует добавить в предыдущую модель контур управления ориентацией
КА, предполагая, что углы и угловые скорости поворота КА в инерциальной системе координат измеряются
приборами
, установленными на его борту, и формируя моменты сил управления на основе этой информации.
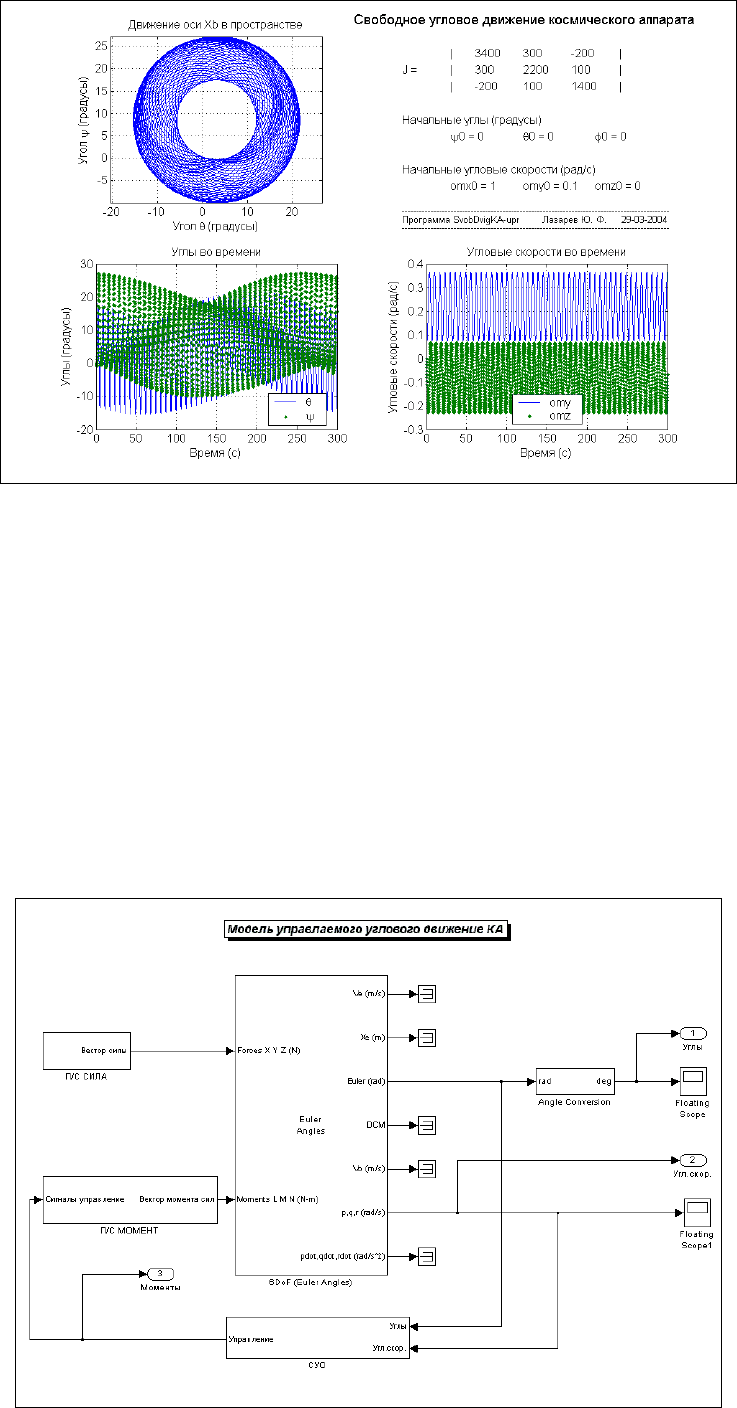
Контур управления реализован в модели UprDvigKA.mdl, представленной на рис. 27, в виде подсистемы
«СУО», блок-схема которой показана на рис. 28.
Рис. 9. 27. Блок-схема управляемого процесса ориентацией КА
393
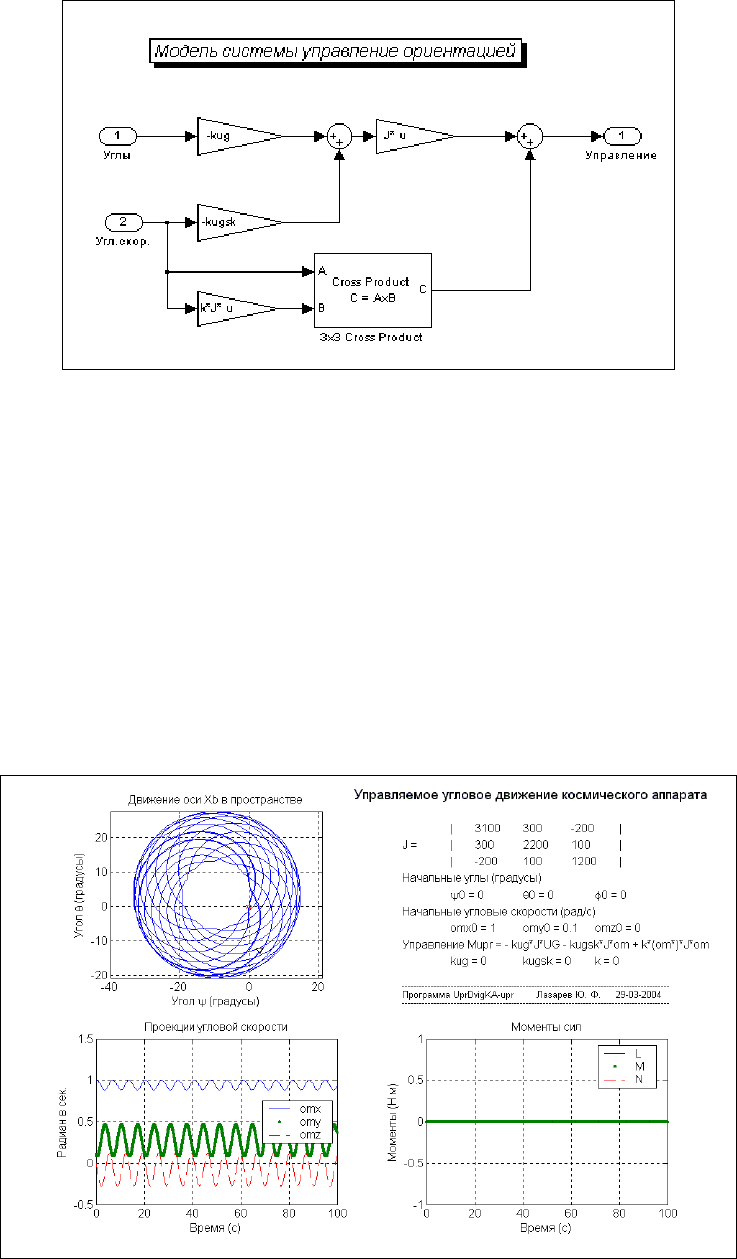
Рис. 9. 28. Блок-схема подсистемы «СУО»
Помимо принятых ранее здесь используются следующие обозначения.
kug
коэффициент обратной связи по углу отклонения
Kugsk
коэффициент обратной связи по угловой скорости
k
коэффициент компенсации гироскопического момента
При этом предполагается, что момент управления ориентацией формируется по закону:
M = - kug*J*Ug – kugsk*J*om – k*(om×)*J*om,
где M – вектор проекций момента управления, Ug – вектор углов Эйлера, om – вектор проекций угло-
вой скорости, (om×) – кососимметричная матрица из проекций угловой скорости. Именно этот закон формиру-
ется в подсистеме «СУО».
Проиллюстрируем работу модели на нескольких примерах.
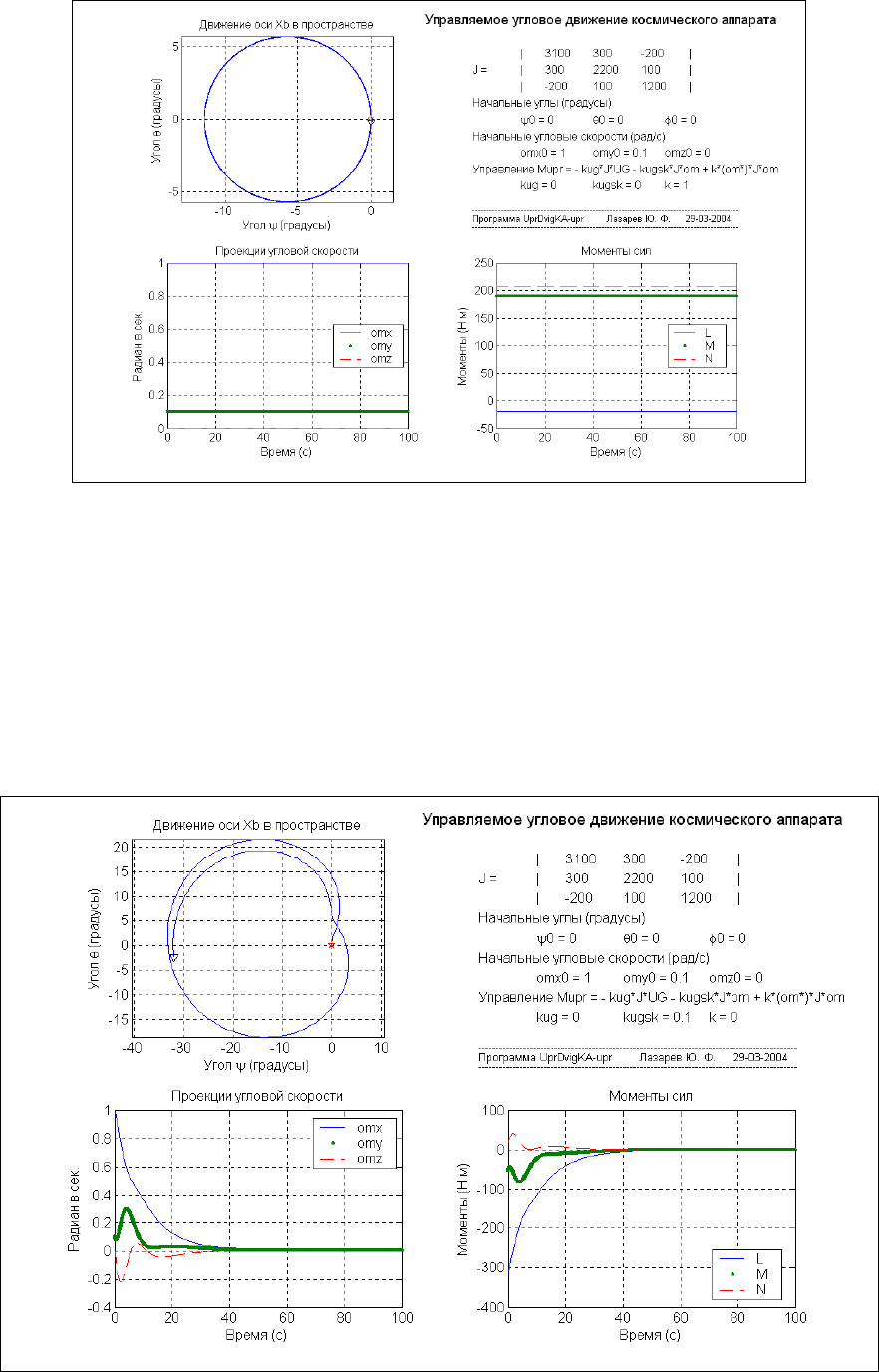
Проверим работу, моделируя
движение КА при отсутствии управления (kug=kugsk=k=0). На рис. 29
показаны результаты такого моделирования для КА с матрицей моментов инерции, принятой в [5].
Рис. 9. 29. Неуправляемое движение несбалансированного КА
Нетрудно убедиться, что результат моделирования совпадает с ожидаемым (см. [14]).
Сначала рассмотрим, как повлияет на движение КА, если осуществить компенсацию гироскопического
момента (k=1). Результат приведен на рис. 30.
394
Рис. 9. 30. Влияние компенсации гироскопического момента
Результатом такого управления, как нетрудно убедиться, является значительное уменьшение (примерно
в 5 раз) амплитуды колебаний оси
.
b
X
Теперь рассмотрим задачу демпфирования (точнее – приведения КА в неподвижное относительно
инерциального пространства положение). Для этого введем управление (обратную связь) только по скоростям.
Если, например, установить kugsk=0.1, а остальные коэффициенты управления равными нулю, то для динами-
чески симметричного КА получим движение, изображенное на рис. 31. Если к демпфирующему моменту доба-
вить компенсацию гироскопического
момента, то движение КА будет происходить (рис. 32) со значительно
меньшими отклонениями осей от начального положения.

395
Рис. 9. 31. Режим "обездвиживания" КА
Рис. 9. 32. Режим "обездвиживания" КА с компенсацией гироскопического момента
Как видим, поставленная задача успешно решается. Побочным следствием такого управления является
отклонение оси
от начального положения на значительные углы.
b
X
Перейдем теперь к режиму приведения положения КА к заданному положению, под которым будем
понимать положение, когда все три угла будут равны нулю. Для этого, помимо обратной связи по скорости
введем обратную связь по углам. Начальные отклонения по углам оси
установим равными 0.1 радиан. То-
гда при kug=0.1 и kugsk=0.3 придем к результатам, показанным на рис. 33.
b
X

396
Рис. 9. 33. Режим стабилизации положения КА
Дополнительная компенсация гироскопического момента (рис. 34) и в этом случае улучшает процесс
стабилизации.
Рис. 9. 34. Режим стабилизации с компенсацией гироскопического момента
Управление по углам отклонения от заданного положения имеет ряд недостатков. К ним относится,
прежде всего, отклонение осей поворотов углов (при больших углах) от осей приложения соответствующих
управляющих моментов. Это может значительно затормозить процесс стабилизации и даже сделать его неус-
тойчивым (при углах отклонения
от заданного положения, больших 90
о
).
397
Этого недостатка лишено управление по кватернионам, когда управляющие моменты по осям КА про-
порциональны составляющим векторной части кватерниона отклонения текущего положения КА от заданного.
Эти составляющие, во-первых пропорциональны не углам отклонений, а синусам половинных углов, во- вто-
рых, эти составляющие кватерниона совпадают с осями, по которым направлены управляющие моменты, а
это
обеспечивает быстрейшее (и без потери устойчивости) приведение КА в заданное положение. Побочным, но
тоже важным фактором является конечность величин управляющих моментов при любых значениях углов на-
чального отклонения.
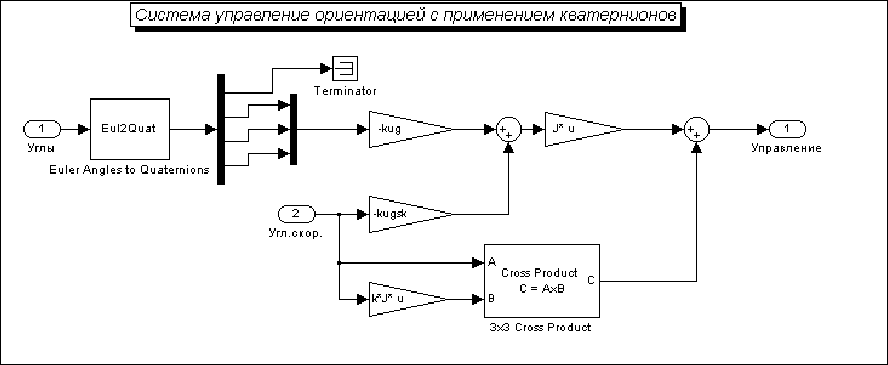
Модель UprDvigKAqw.mdl управляемого по кватернионам процесса ориентацией отличается от моде-
ли, приведенной на рис. 27, только содержимым блока «СУО», блок-схема которого для
этого случая приво-
дится на рис. 35.
Рис. 9. 35. Блок-схема подсистемы «СУО» для управления по кватерниону
Управление работой модели и выводом результатов осуществляется программой
UprDvigKAqw1_upr
,
текст которой приведен ниже.
% UprDvigKAqw1_upr
% Управляющая программа для модели UprDvigKA
% Лазарев Ю.Ф. 14-05-2004
clear all
clc
% Установка параметров КА
%J=[3100 0 0;0 2200 0;0 0 2200]; % Матрица моментов инерции КА
%J=[3100 0 0;0 2200 0;0 0 1200]; % Матрица моментов инерции КА
J=[3100 300 -200;300 2200 100;-200 100 1200]; % Матрица моментов инерции КА
m=2000; % Масса КА
% Задание коэффициентов управления
kug=0.1; % К-нт обратной связи по углам
kugsk=0.3; % К-нт обратной связи по угловым скоростям
k=0; % К-нт компенсации
гироскопического момента
% Установка начальных условий
XYZ0=[0 0 0]; % Начальное положение КА
V0=[0 0 0]; % Начальные скорости КА
UG0=[0 1 1]; % Начальные углы КА
UgSk0=[0 0 0]; % Начальные угловые скорости КА
% Установка параметров интегрирования
TK=100; % Конечное время интегрирования
hi=0.1; % Шаг интегрирования
% Запуск модели
sim('UprDvigKAqw');
% Запись результатов интегрирования
FI=yout(:,1); TE=yout(:,2); PSI=yout(:,3);
omx=yout(:,4); omy=yout(:,5); omz=yout(:,6);
t=tout;
L=yout(:,7); M=yout(:,8); N=yout(:,9);
% Графическое представление результатов
subplot(2,2,1)
plot(-PSI,TE,-PSI(1),TE(1),'pr',-PSI(end),TE(end),'kv'), grid
axis('equal');
set(gca,'FontSize',12)
398
title('Движение оси Хb в пространстве');
ylabel('Угол \theta (градусы)');
xlabel('Угол \psi (градусы)');
subplot(2,2,3)
plot(t,omx,t,omy,'.',t,omz,'--'), grid%plot(t,L,t,M,'.',t,N,'--'), grid
set(gca,'FontSize',12)
title('Проекции угловой скорости');%title('Моменты сил');
xlabel('Время (с)');
ylabel('Радиан в сек.');%ylabel('Моменты (Н м)');
legend(' omx ',' omy ',' omz ',0);%legend(' L ',' M ',' N ',0);
subplot(2,2,4)
plot(t,L,t,M,'.',t,N,'--'), grid
set(gca,'FontSize',12)
title('Моменты сил');
xlabel('Время (с)');
ylabel('Моменты (Н м)');
legend(' L ',' M ',' N ',0);
subplot(2,2,2)
axis('off');
h=text(-0.3,1.1,'Управляемое по кватернионам угловое движение КА','FontSize',14);
h=text(0.1,0.9,'| ','FontSize',12);
h=text(0.2,0.9,num2str(J(1,1)),'FontSize',12);
h=text(0.4,0.9,num2str(J(1,2)),'FontSize',12);
h=text(0.6,0.9,num2str(J(1,3)),'FontSize',12);
h=text(0.8,0.9,'| ','FontSize',12);
h=text(-0.1,0.8,'J = ','FontSize',12);
h=text(0.1,0.8,'| ','FontSize',12);
h=text(0.2,0.8,num2str(J(2,1)),'FontSize',12);
h=text(0.4,0.8,num2str(J(2,2)),'FontSize',12);
h=text(0.6,0.8,num2str(J(2,3)),'FontSize',12);
h=text(0.8,0.8,'| ','FontSize',12);
h=text(0.1,0.7,'| ','FontSize',12);
h=text(0.2,0.7,num2str(J(3,1)),'FontSize',12);
h=text(0.4,0.7,num2str(J(3,2)),'FontSize',12);
h=text(0.6,0.7,num2str(J(3,3)),'FontSize',12);
h=text(0.8,0.7,'| ','FontSize',12);
h=text(-0.1,0.6,'Начальные
углы (градусы)','FontSize',12);
h=text(0.1,0.5,['\psi0 = ',num2str(UG0(3)*180/pi)],'FontSize',12);
h=text(0.4,0.5,['\theta0 = ',num2str(UG0(2)*180/pi)],'FontSize',12);
h=text(0.7,0.5,['\phi0 = ',num2str(UG0(1)*180/pi)],'FontSize',12);
h=text(-0.1,0.4,'Начальные угловые скорости (рад/с)','FontSize',12);
h=text(0.1,0.3,['omx0 = ',num2str(UgSk0(1))],'FontSize',12);
h=text(0.4,0.3,['omy0 = ',num2str(UgSk0(2))],'FontSize',12);
h=text(0.7,0.3,['omz0 = ',num2str(UgSk0(3))],'FontSize',12);
h=text(-0.1,0.2,'Управление Mupr = - kug*J*Qwat - kugsk*J*om + k*(om*)*J*om','FontSize',12);
h=text(0.1,0.1,['kug = ',num2str(kug)],'FontSize',12);
h=text(0.4,0.1,['kugsk = ',num2str(kugsk)],'FontSize',12);
h=text(0.7,0.1,['k = ',num2str(k)],'FontSize',12);
h=text(-0.1,-0.05,'---------------------------------------------------------------------------------------------');
h=text(-0.1,-0.1,'Программа UprDvigKAqw1-upr Лазарев Ю. Ф. 14-05-2004');
h=text(-0.1,-0.15,'---------------------------------------------------------------------------------------------');
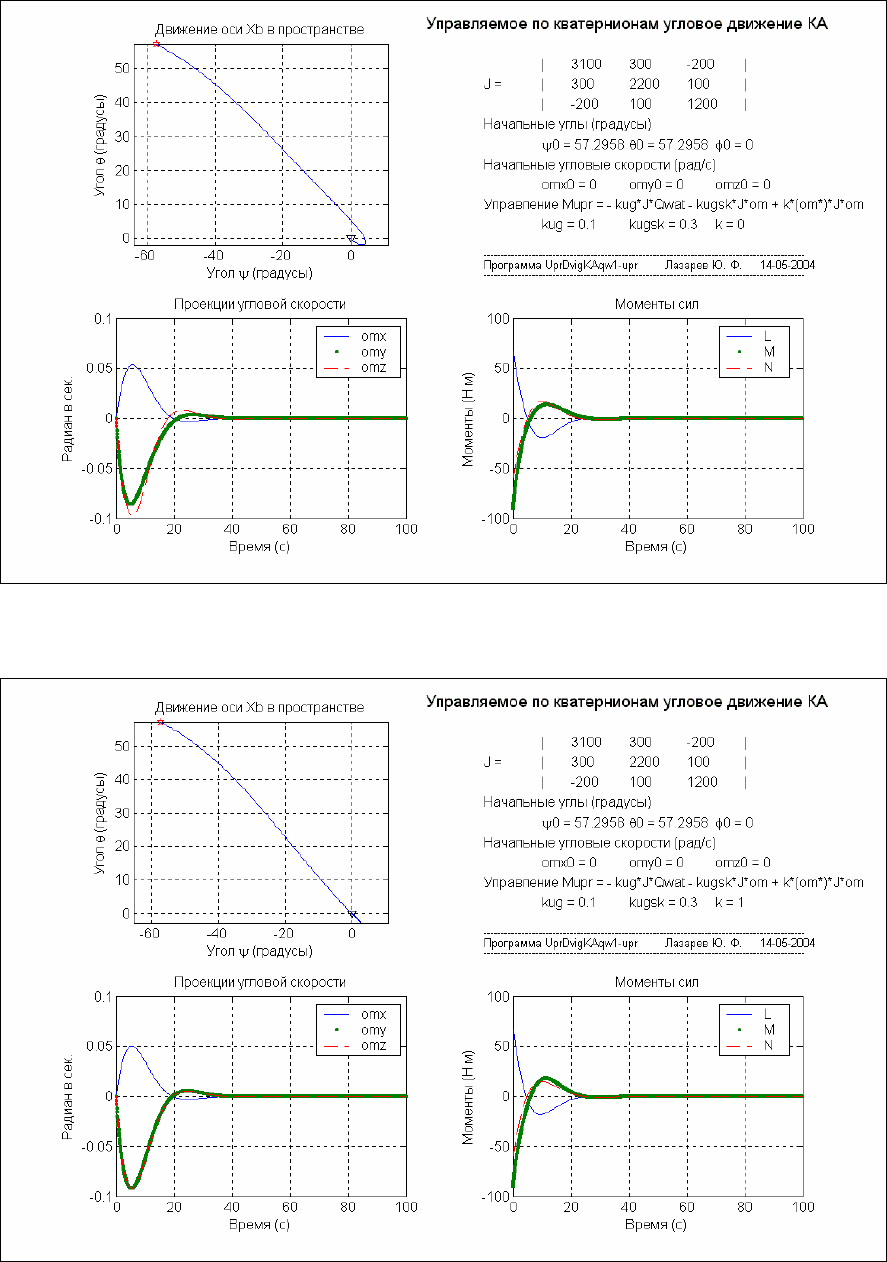
Результаты работы этой программы представлены на рис. 36. и 37. Коэффициенты управления приняты преж-
ними, но углы отклонения большими в 10 раз (по одному радиану). Как и ранее рассмотрены движения без и с
компенсацией гироскопического момента.
399
Рис. 9. 36. Управление ориентацией по кватерниону отклонения
Рис. 9. 37. Управление по кватерниону с компенсацией гироскопического момента
Из приведенных результатов следует:
1) при управлении по кватерниону отклонения движение КА к заданному положению происходит по
кратчайшему пути;
2) процесс установления в заданное положение устойчив при весьма больших начальных отклонениях;
400
3) длительность процесса приведения сохраняется такой же, как и при управлении по углам, хотя вели-
чина начального отклонения увеличена в 10 раз;
4) величины моментов управления значительно меньше требуемых для управления по углам;
5) по-прежнему, компенсация гироскопического момента приводит к улучшению динамики процесса
ориентации.
9.4. Моделирование движения искусственного спутника Земли
Перейдем к составлению модели орбитального движения искусственного спутника Земли с учетом его
угловой стабилизации.
Для этого введем следующие системы координат:
1) инерциальную (неподвижную) систему
, начало которой поместим в центр Земли, ось
направим перпендикулярно плоскости орбиты, ось
- вдоль линии, соединяющей центр Земли с начальным
положением ИСЗ на орбите, а ось
- в плоскости орбиты по вектору начальной скорости ИСЗ;
eee
ZYX
e
Z
e
X
e
Y
2) орбитальную систему
, начало которой поместим в центр масс ИСЗ, ось направим па-
раллельно оси
, ось - вдоль линии, соединяющей центр Земли с текущим положением ИСЗ на орбите, а
ось
- в плоскости орбиты вперед по движению ИСЗ по орбите;
ooo
ZYX
o
Z
e
Z
o
X
o
Y
3) связанную с телом ИСЗ систему
, начало которой поместим также в центр масс ИСЗ.
bbb
ZYX
ИСЗ как объект управления имеет шесть степеней свободы – три координаты положения центра масс в
инерциальной системе координат и три угловые степени свободы, определяющие угловое положение тела
спутника по отношению к инерциальной системе. Управление движением ИСЗ состоит из двух тесно связан-
ных процессов –
управления движением центра масс ИСЗ и управления его угловым положением. Первый из
них был рассмотрен и промоделирован ранее. Для управления орбитальным движением ИСЗ важно ориентиро-
вать и стабилизировать угловое его положение в орбитальной системе координат (см. выше).
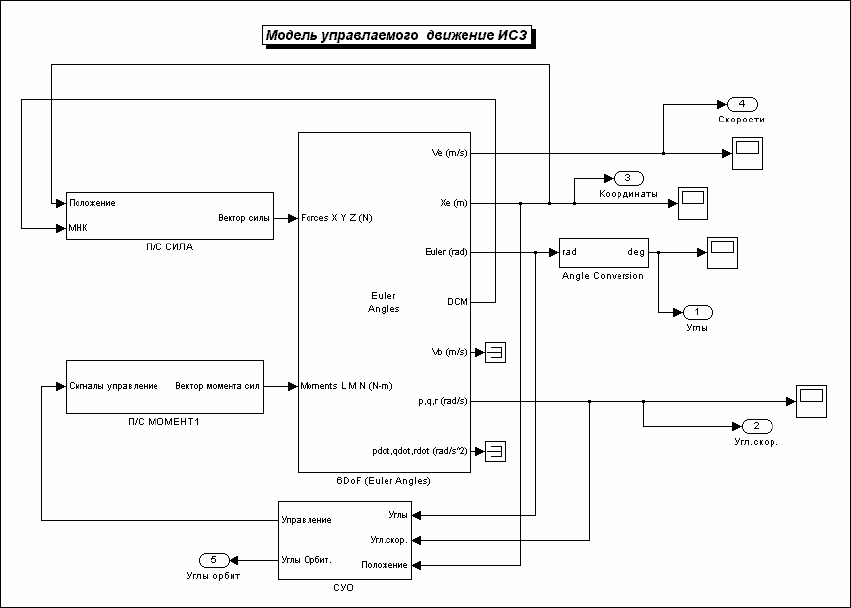
Возможный вариант UprDigISZqw1.mdl модели полного движения спутника приведен на рис. 38.
Рис. 9. 38. Блок-схема модели управляемого движения ИСЗ