Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

401
Основным отличием этой модели от ранее представленных является наличие обратной связи (управле-
ния) по вектору силы, действующей на центр масс ИСЗ. Она реализована в виде подсистемы «П/С СИЛА»,
блок схема которой показана на рис. 39.
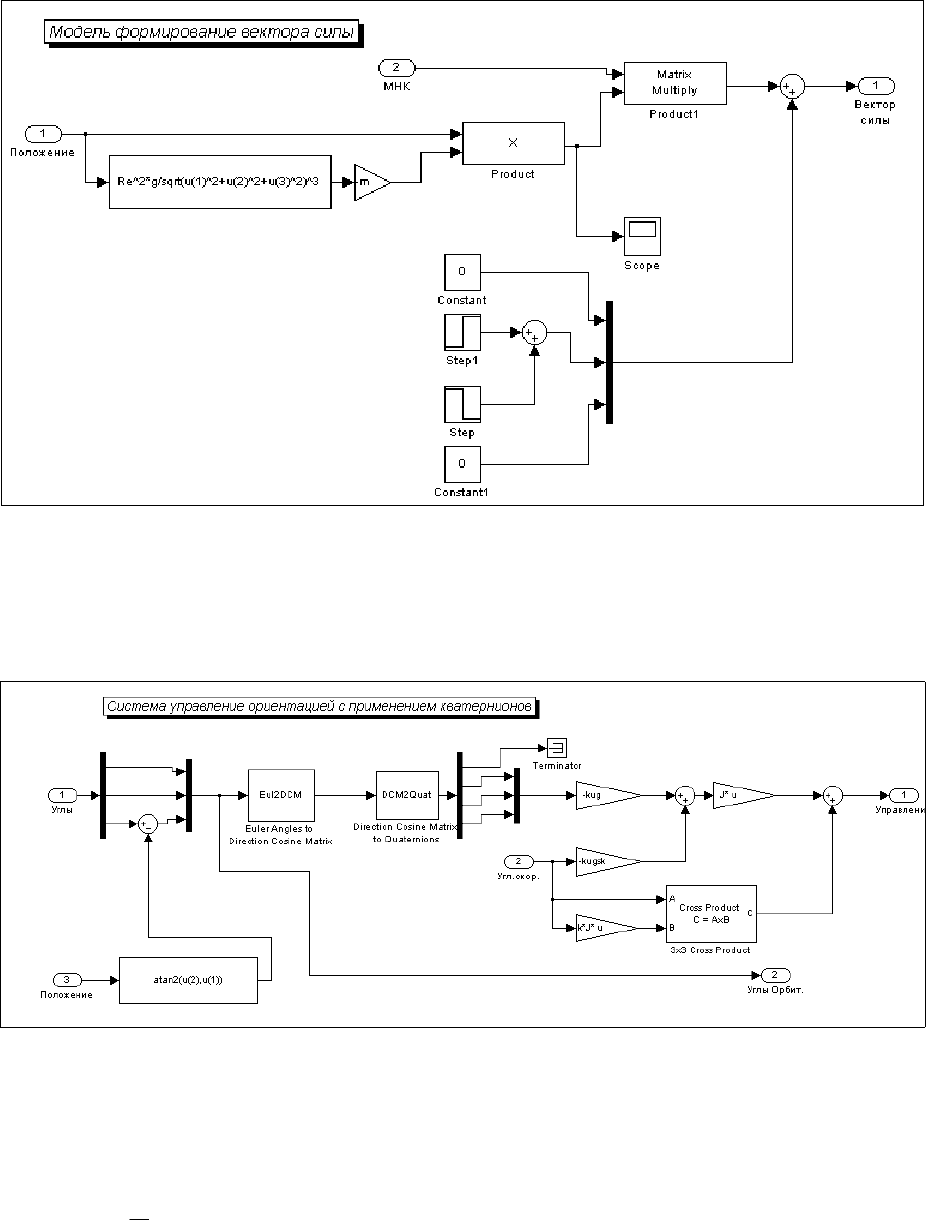
Рис. 9. 39. Блок-схема блока «П/С СИЛА»
Блок-схема подсистемы «СУО» (рис. 40) также изменена, ввиду того, что ИСЗ необходимо ориентиро-
вать не в инерциальной, а в орбитальной системе координат.
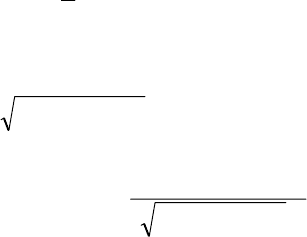
Рис. 9.40. Блок-схема блока «СУО»
Основным назначением блока «П/С СИЛА» является формирование вектора силы гравитации, дейст-
вующей на ИСЗ со стороны Земли. Для этого вначале следует определить величину ускорения гравитации в той
точке пространства, где расположен спутник. Это ускорение определяется выражением:
2
⎟
⎠
⎞
⎜
⎝
⎛
=
r
R
gg
c
,
где
- ускорение гравитации на поверхности Земли, - ускорение в точке, находящейся на расстоя-
нии
от центра Земли, а - радиус Земли. Теперь вектор силы гравитации, действующей на ИСЗ можно
определить из соотношения:
g
c
g
r
R
F
402
rF
r
mg
c
1
−=
.
Здесь
- масса ИСЗ, а - радиус-вектор его центра масс.
m
r
Если известны текущие координаты центра масс
спутника в инерциальной системе, то
eee
ZYX ,,
222
eee
ZYXr
++=
,
и вычисление проекций вектора
F
в инерциальной системе можно свести к формуле
rF
3222
2
)(
eee
c
ZYX
R
mgmg
++
−=−=
.
Именно эти операции и обеспечены в блоке «П/С СИЛА» (см. рис. 39). Так как на вход блока 6DoF
следует подать вектор силы через его проекции на связанные с ИСЗ оси, то далее полученный вектор силы в
инерциальной системе преобразуется в вектор проекций этой силы на связанную систему координат путем
умножения на
матрицу направляющих косинусов ИСЗ в инерциальной системе.
Вторая задача блока – сформировать силу активного воздействия вдоль оси
связанной системы для
осуществления перехода на другую орбиту. Эта цель достигается нижней ветвью в блок-схеме рис. 39. Здесь
формируется постоянная по величине сила, начинающая свое действие в заданный момент времени и дейст-
вующая заданный промежуток времени. При этом использованы следующие обозначения:
b
Y
Tn
Начальный момент времени действия силы коррекции орбиты
tau
Промежуток времени, в течение которого действует сила коррекции
DF
Величина силы коррекции
Блок «СУО» в представленной модели (рис. 37) отличается от аналогичного блока в предыдущей мо-
дели (рис. 35), прежде всего, наличием части, которая вычисляет угловое отклонение связанной с ИСЗ системы
координат от орбитальной. Это необходимо для обеспечения управлением ориентацией спутника относительно
не инерциальной, а орбитальной системы. Помимо этого, вместо блока
непосредственного преобразования
углов Эйлера в кватернион поворота используется последовательное преобразование углов Эйлера в матрицу
направляющих косинусов, а затем последней в кватернион поворота. Это позволяет избавиться от разрывов в
угловых координатах при переходе значений углов через 180
о
.
Текст управляющей программы
UprDvigISZqw1_upr
приведен ниже.
% UprDvigISZqw1_upr
% Управляющая программа для модели SvDvigKA
% Лазарев Ю.Ф. 15-05-2004
clear all, clc
OM=7.292115e-5; Re=6.37814e6; g=9.78;
% Установка параметров КА
%J=[1800 0 0;0 3400 0;0 0 1800]; % Матрица моментов инерции КА
%J=[3400 0 0;0 2200 0;0 0 1400]; % Матрица моментов инерции КА
J=[2200 300 -200;300 3400 100;-200 100 1400]; % Матрица моментов инерции КА
m=2000; % Масса КА
% Установка начальных условий
XYZ0=[6.4e6 0 0]; % Начальное положение КА
V0=[0 8e3 0]; % Начальные скорости КА
UG0=[0 1 0]; % Начальные углы КА
UgSk0=[0 0.2 0]; % Начальные угловые скорости КА
% Задание коэффициентов
управления
kug=0.1; % К-нт обратной связи по углам
kugsk=0.3; % К-нт обратной связи по угловым скоростям
k=1; % К-нт компенсации гироскопического момента
Tn=3600*2; tau=1000; DF=2000;
% Установка параметров интегрирования
TK=6*3600; % Конечное время интегрирования
hi=0.5; % Шаг интегрирования
% Запуск модели
sim('UprDvigISZqw1');
% Запись результатов интегрирования
FI=yout(:,1); TE=yout(:,2); PSI=yout(:,3);
omx=yout(:,4); omy=yout(:,5); omz=yout(:,6);
Xe=yout(:,7); Ye=yout(:,8); Ze=yout(:,9);
Vex=yout(:,10); Vey=yout(:,11); Vez=yout(:,12);
FIo=yout(:,13); TEo=yout(:,14); PSIo=unwrap(yout(:,15));
t=tout; n=length(t);
k1=0;
for ks=1:n
if t(ks)<=Tn
k1=k1+1; t1(k1)=t(ks);
403
end
end
K1=k1; Xe1=Xe(1:K1); Ye1=Ye(1:K1); k1=0;
for ks=1:n
if (t(ks)>Tn)&(t(ks)<=Tn+tau)
k1=k1+1; t2(k1)=t(ks);
end
end
K2=k1; Xe2=Xe(K1+1:K1+K2); Ye2=Ye(K1+1:K1+K2); k1=0;
for ks=1:n
if t(ks)>Tn+tau
k1=k1+1; t3(k1)=t(ks);
end
end
K3=k1; Xe3=Xe(K1+K2+1:K1+K2+K3); Ye3=Ye(K1+K2+1:K1+K2+K3);
% Графическое представление результатов
subplot(2,2,1)
plot(Xe1*1e-6,Ye1*1e-6,'--',Xe3*1e-6,Ye3*1e-6,'.',...
Xe2*1e-6,Ye2*1e-6,'*',0,0,'o',XYZ0(1)*1e-6,XYZ0(2)*1e-6,'pk'), grid
axis('equal');
title('Движение ИСЗ в плоскости X - Y');
xlabel('Координата X (тыс. км)'); ylabel('Координата Y (тыс. км)');
legend(' орбита 1 ',' орбита 2 ',' активный ',0);
subplot(2,2,3)
plot(t1/3600,Xe1*1e-6,'k--',t2/3600,Xe2*1e-6,'k*',t3/3600,Xe3*1e-6,'k.',...
t1/3600,Ye1*1e-6,'b--',t2/3600,Ye2*1e-6,'b*',t3/3600,Ye3*1e-6,'b.'), grid
title('Инерциальные координаты');
xlabel('Время (часы)'); ylabel('Координаты (тыс. км)');
legend(' орбита 1 ',' активный ',' орбита 2 ',0);
subplot(2,2,4)
plot(t(1:80),PSI(1:80),'*',t(1:80),TE(1:80),t(1:80),PSIo(1:80)*180/pi,'.',...
t(1:80),TEo(1:80)*180/pi), grid
title('Процесс угловой стабилизации'); xlabel('Время (с)'); ylabel('Углы (градусы)');
legend(' \psi ',' \theta ',' \psio ',' \thetao ',0);
subplot(2,2,2)
axis('off');
h=text(0.0,1.1,'Управляемое движение
ИСЗ','FontSize',14);
h=text(0.3,0.95,'| '); h=text(0.4,0.95,num2str(J(1,1)));
h=text(0.6,0.95,num2str(J(1,2))); h=text(0.8,0.95,num2str(J(1,3)));
h=text(1.0,0.95,'| '); h=text(0.1,0.9,'J = ');
h=text(-0.3,0.9,['m = ',num2str(m)]);
h=text(0.3,0.9,'| '); h=text(0.4,0.9,num2str(J(2,1)));
h=text(0.6,0.9,num2str(J(2,2))); h=text(0.8,0.9,num2str(J(2,3)));
h=text(1.0,0.9,'| '); h=text(0.3,0.85,'| ');
h=text(0.4,0.85,num2str(J(3,1))); h=text(0.6,0.85,num2str(J(3,2)));
h=text(0.8,0.85,num2str(J(3,3))); h=text(1.0,0.85,'| ');
h=text(-0.1,0.75,'Начальное положение:'); h=text(-0.3,0.7,['Xe0 = ',num2str(XYZ0(1)*1e-6)]);
h=text(0.0,0.7,['Ye0 = ',num2str(XYZ0(2)*1e-6)]);
h=text(0.3,0.7,['Ze0 = ',num2str(XYZ0(3)*1e-6)]); h=text(0.7,0.7,'(тыс. км) ');
h=text(-0.3,0.65,['\psi0 = ',num2str(UG0(3)*180/pi)]);
h=text(0.0,0.65,['\theta0 = ',num2str(UG0(2)*180/pi)]);
h=text(0.3,0.65,['\phi0 = ',num2str(UG0(1)*180/pi)]); h=text(0.7,0.65,'(градусы) ');
h=text(-0.1,0.55,'Начальные скорости:');
h=text(-0.3,0.5,['Vex0 = ',num2str(V0(1)*1e-3)]); h=text(0.0,0.5,['Vey0 = ',num2str(V0(2)*1e-3)]);
h=text(0.3,0.5,['Vez0 = ',num2str(V0(3)*1e-3)]); h=text(0.7,0.5,'(км/c) ');
h=text(-0.3,0.45,['omx0 = ',num2str(UgSk0(1))]); h=text(0.0,0.45,['omy0 = ',num2str(UgSk0(2))]);
h=text(0.3,0.45,['omz0 = ',num2str(UgSk0(3))]); h=text(0.7,0.45,'(рад/c) ');
h=text(-0.1,0.35,'К-нты управления ориентацией:'); h=text(-0.3,0.3,['kug = ',num2str(kug)]);
h=text(0.0,0.3,['kugsk = ',num2str(kugsk)]); h=text(0.3,0.3,['k = ',num2str(k)]);
h=text(-0.1,0.2,['Начало активного участка Tn = ',num2str(Tn),' сек']);
h=text(-0.1,0.1,['Длительность активного участка tau = ',num2str(tau),' сек']);
h=text(-0.1,0.0,['Тяга F = ',num2str(DF),' Н']);
h=text(-0.1,-0.05,'---------------------------------------------------------------------------------------------');
h=text(-0.1,-0.1,'Программа UprDvigISZqw1-upr Лазарев Ю. Ф. 15-05-2004');
h=text(-0.1,-0.15,'---------------------------------------------------------------------------------------------');
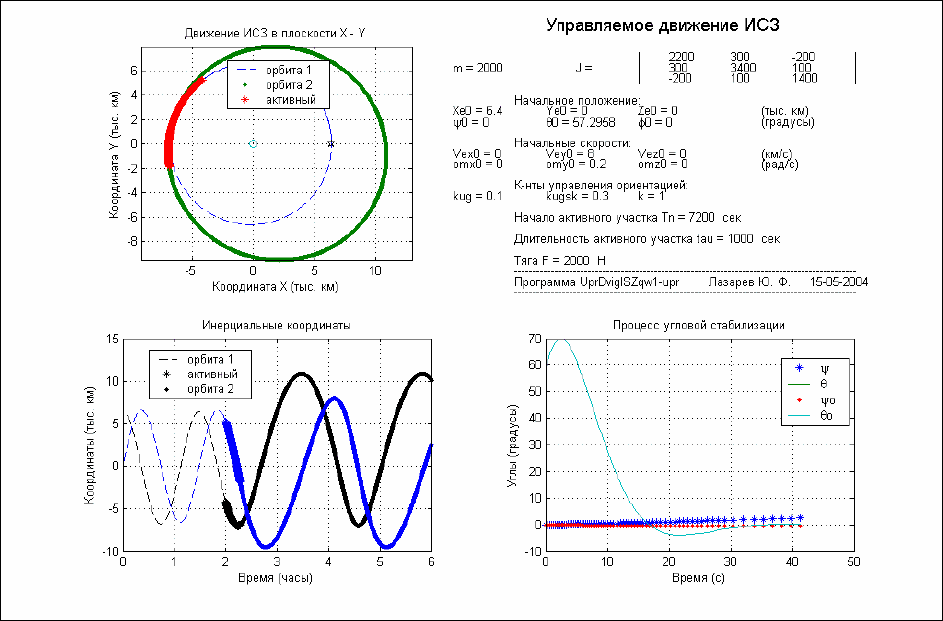
На рис. 41 отображены результаты работы программы и модели.
404
Рис. 9.41. Маневрирование ИСЗ
Полученные результаты подтверждают достаточно хорошие свойства модели, позволяющие исследо-
вать достаточно сложные процессы управления движением ИСЗ.
9.5. Вопросы для самопроверки
1. Каково основное назначение библиотеки Aerospace? из каких разделов она состоит?
2. Каково основное назначение блоков раздела Equations of Motion? в чем различие между блоками этого разде-
ла?
3. Для чего предназначены блоки раздела Environment?
4. Какие группы силовых воздействий определяют движение летательного аппарата?
5. Для чего служат блоки раздела Propulsion?
6. Каково основное назначение блоков разделов Actuators и GNC?
7.
Какие задачи решают блоки раздела Transfomations?

405
Урок 10. Моделирование электроэнергетических систем
(библиотека SimPowerSystems)
Общая характеристика библиотеки SimPowerSystems
Модель запуска асинхронного двигателя
Модель трехфазного мостового управляемого выпрямителя
406
Библиотека
SimPowerSystems
предназначена для моделирования поведения электрических сило-
вых систем, представляющих собой комбинации электрических цепей и электромеханических устройств, таких
как электрические двигатели и генераторы. Библиотека функционирует в составе пакета Simulink
в среде Mat-
lab и содержит модели типовых устройств силовой электроэнергетики, таких как трансформаторы, преобразо-
ватели, линии электропередач, электромашины и элементы силовой электроники.
Идеология составления блок-схемы модели в библиотеке
SimPowerSystems
существенно отличает-
ся от идеологии составления блок-схем в S-моделях. В S-моделях соединяемые блоки представляют собой про-
граммы математического преобразования входных величин блока в выходные величины независимо от их фи-
зического содержания. В блок-схемах
SimPowerSystems
соединения блоков
SimPowerSystems
обычно
следует рассматривать как имитацию электрических соединений, линии соединения – как проводную связь,
осуществляющую передачу электрического сигнала (тока) от выхода одного блока к входу следующего блока, а
сами блоки библиотеки
SimPowerSystems
– как модели электрических процессов, протекающих в устрой-
стве, поведение которого моделируется.
Из этого вытекает, что блоки S-модели, в общем случае, не могут быть соединены с большинством
блоков библиотеки
SimPowerSystems
. В частности, нельзя непосредственно использовать блоки библиоте-
ки
SIMULINK
для формирования электрических сигналов заданной формы, нельзя непосредственно вывести
значения токов и напряжений в обзорные окна Scope и на выходные порты и т. п. Тем не менее, модели биб-
лиотеки
SimPowerSystems
функционируют в среде
Simulink
, и потому им должны быть доступны все
возможности этой среды, предоставляемые библиотекой
SIMULINK
.
В дальнейшем для простоты будем использовать следующую терминологию. Будем называть S-
блоками блоки библиотеки
SIMULINK
, P-блоками - блоки библиотеки
SimPowerSystems
, линии, соеди-
няющие S-блоки, - m-линиями, входы и выходы S-блоков - m-входами и m-выходами, линии, соединяющие P-
блоки - p-линиями, входы и выходы P-блоков - p-входами и p-выходами. Напомним, что m-линии переносят
сигналы-функции, независимо от их физической природы, а p-линии – электрические сигналы и являются ана-
логом идеальной проводной связи. Аналогично, m-входы и m-выходы воспринимают
или генерируют функ-
циональные сигналы, а p-входы и p-выходы реализуют электрическое соединение проводника p-линии с соот-
ветствующим P-блоком.
Для связи P-блоков с обычными S-блоками предназначены лишь некоторые блоки библиотеки
SimPowerSystems
, такие как блоки-измерители электрических сигналов (тока, напряжения и т. п.), которые
имеют p-входы и m-выход, некоторые блоки источников электрических сигналов (они имеют m-вход и p-
выходы), а также некоторые другие блоки. Именно эти блоки позволяют использовать все богатейшие возмож-
ности библиотеки
SIMULINK
для моделирования электроэнергетических систем и, в частности, использовать
возможности программирования в MatLab процессов ввода, преобразования и вывода ( в том числе – в графи-
ческой форме) информации.
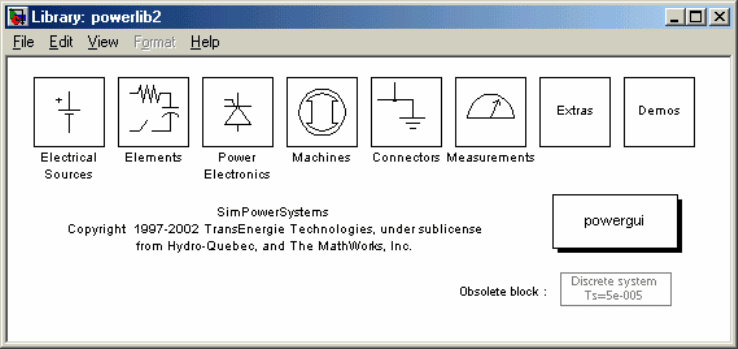
10.1. Общая характеристика библиотеки SimPowerSystems
В браузере Simulink с помощью контекстного меню библиотеки
SimPowerSystems
вызывается
окно
powerlib2
этой библиотеки (рис. 1).
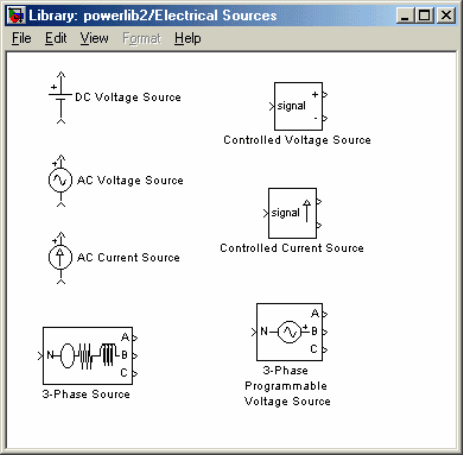
Рис. 10. 1. Состав библиотеки powerlib2
В библиотеку входят девять разделов:
Electrical
Sources
(Источники электричества) содержит блоки, моделирующие источники тока и
напряжения
Elements
(Элементы электрических цепей) включает блоки, моделирующие электрические
407
процессы в элементарных электрических элементах (RLC-цепи, реальная провод-
ная связь, электрическая нагрузка, трансформаторы и т. п.)
Power Electron-
ics
(Элементы силовой электроники) содержит блоки, моделирующие поведение
коммутирующих элементов силовой электроники (диоды, тиристоры, мосты,
управляемые ключи и т. п.)
Machines
(Машины) содержит блоки-модели электрических машин различных типов
Connectors
(Соединители) состоит из блоков, моделирующих электрические соединения раз-
личных типов
Measurements
(Измерительные элементы) содержит блоки, имитирующие измерительные элек-
трические приборы (амперметры, вольтметры, омметры и т. п.)
Extras
Библиотека дополнительных блоков
Demos
Демонстрационные программы-модели
Powergui
Интерактивный блок окна графического интерфейса пользователя
Раздел Electrical Sources
Содержимое раздела
Electrical Sources
(Источники электричества) представлено на рис. 2.
Рис. 10. 2. Содержимое раздела
Electrical Sources
В него входят 7 блоков.
DC Voltage Source
Источник постоянного напряжения
AC Voltage Source
Источник переменного (синусоидального) на-
пряжения
AC Current Source
Источник переменного (синусоидального) тока
Controlled Voltage Source
Источник управляемого напряжения
Controlled Current Source
Источник управляемого тока
3-Phase Source
Трехфазный источник
3-Phase Programmable
Voltage Source
Трехфазный программируемый источник на-
пряжения
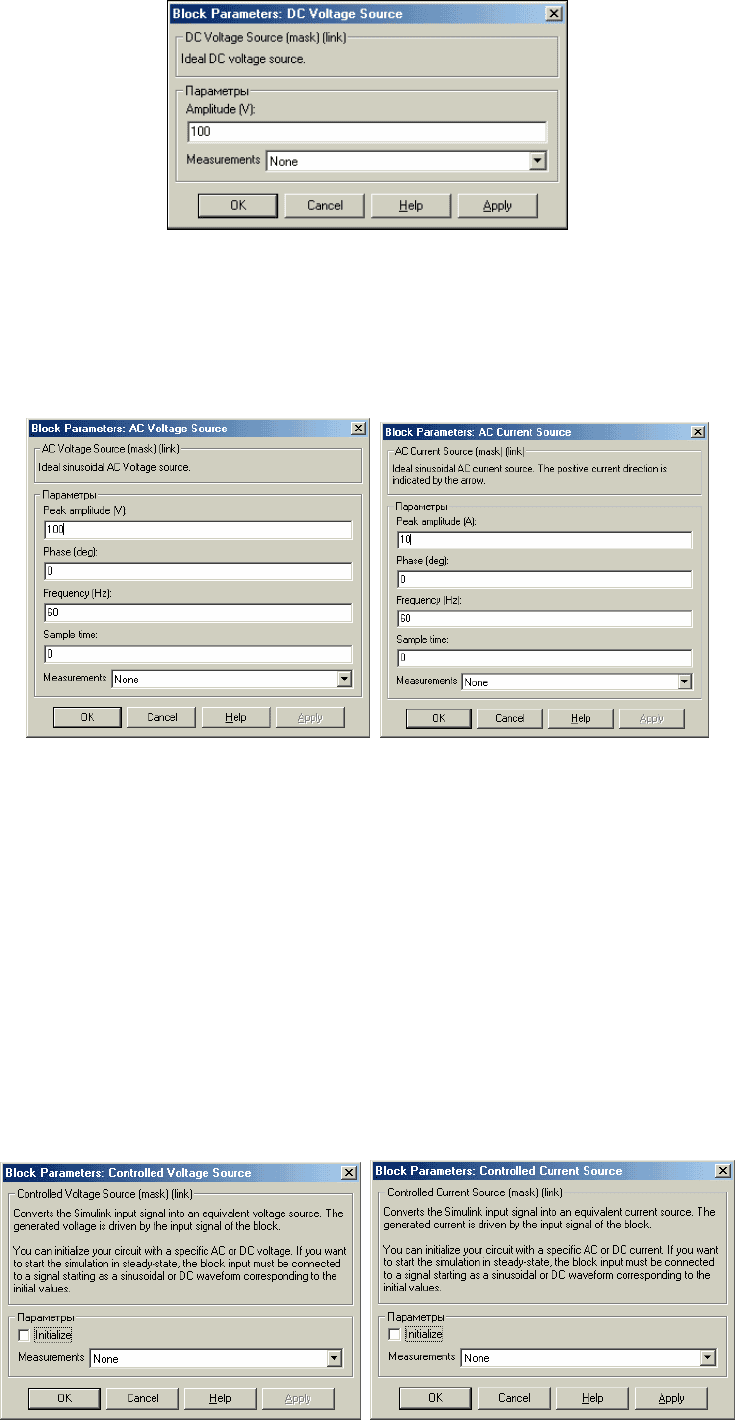
Блок
DC Voltage Source имитирует работу идеального источника постоянного напряжения. Единственный
параметр настраивания (рис. 3) – величина напряжения на клеммах источника.
408
Рис. 10. 3. Окно настраивания блока
DC Voltage Source
Блоки
AC Voltage Source
и
AC Current Source
имитируют работу источников синусоидального
напряжения и тока соответственно. Окна настраивания блоков (рис. 4 и 5) почти не отличаются.
Рис. 10. 4. Окно настраивания блока
AC Voltage Source
Рис. 10. 5. Окно настраивания блока AC Current Source
В параметры настраивания входят такие величины:
Pick amplitude (V)
Амплитуда синусоидального напряжения в вольтах
Pick amplitude (A)
Амплитуда синусоидального тока в амперах
Phase (deg)
Начальная фаза в градусах
Frequency (Hz)
Частота изменения тока (напряжения) в герцах
Вход и выход обоих блоков – это клеммы подсоединения источников к элементам электрической схе-
мы.
Два блока
Controlled Voltage Source (Управляемый источник напряжения) и Controlled
Current Source
(Управляемый источник тока) позволяют создать источник с произвольным законом измене-
ния напряжения или тока во времени, используя блоки раздела Sources библиотеки
SIMULINK
. В отличие от
рассмотренных ранее блоков оба блока имеют m-вход, к которому могут быть подсоединены выходы любого S-
блока. На рис. 6 и 7 приведены окна настраивания этих блоков. Они вполне идентичны.
409
Рис. 10. 6. Окно настраивания блока
Controlled Voltage Source
Рис. 10. 7. Окно настраивания блока
Controlled CurrentSource
Блоки вырабатывают на выходных клеммах напряжение или ток, равный тому S-сигналу, который по-
ступает на его вход.
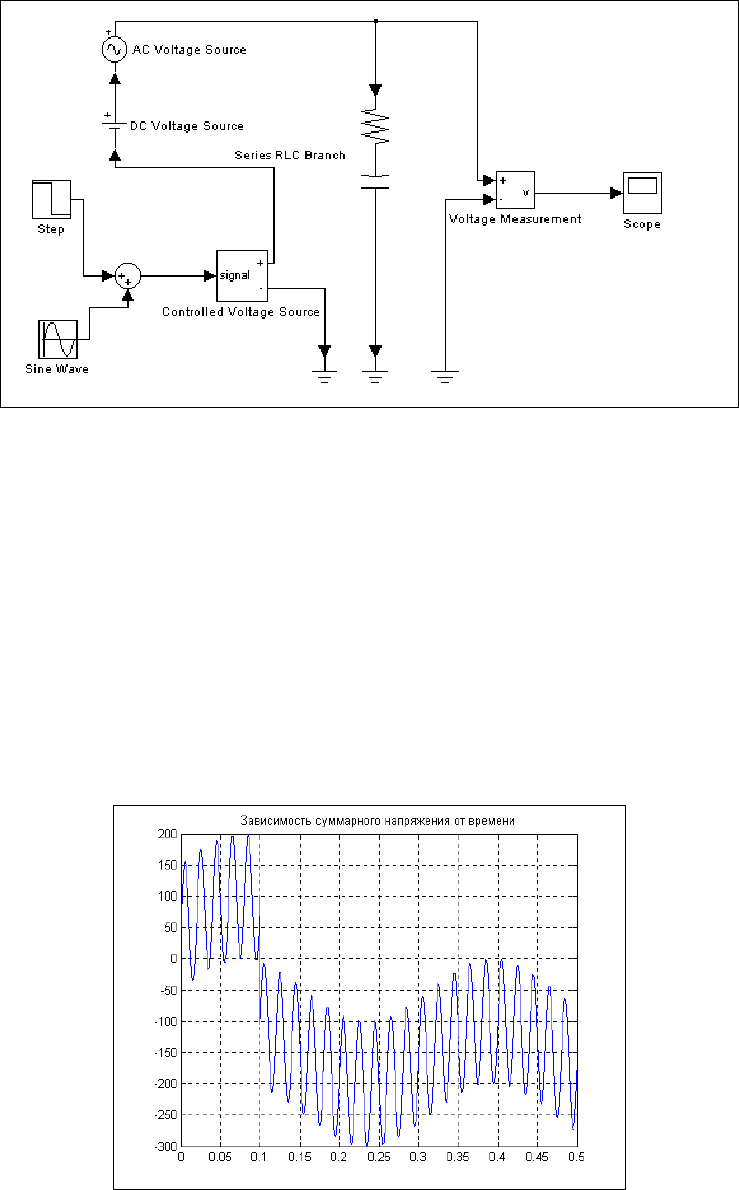
На рис. 8 приведена схема моделирования трех видов источников напряжения.
Рис. 10. 8. Схема моделирования работы трех видов источников напряжения
На схеме последовательно соединены три блока источников напряжения:
- блок
AC Voltage Source, на котором установлена амплитуда 100 В и частота 50 Гц;
- блок
DC Voltage Source, где установлено постоянное напряжение 50 В;
- блок управляемого источника напряжения
Controlled Voltage Source, на вход которого (m-вход) подает-
ся сумма двух сигналов – гармонического с частотой 20 радиан в секунду и амплитудой 50 В и скачкообразно-
го сигнала, равного 0 до момента времени 0,1 секунды и -200 В – после этого момента.
Эти три источника напряжения замкнуты на RC- цепь (R=1 Ом, C=10
-6
Ф). Общее напряжение измеря-
ется с помощью измерительного блока
Voltage Measurement
(Вольтметр), выход которого является m- вы-
ходом, к которому подключен блок Scope.
Результат моделирования, отображаемый в блоке Scope, представлен на рис. 9.
Нетрудно видеть, что суммарное напряжение, как и следовало ожидать, равно сумме напряжений ука-
занных трех источников.
Рис. 10. 9. Результат моделирования по схеме рис. 10. 8
410
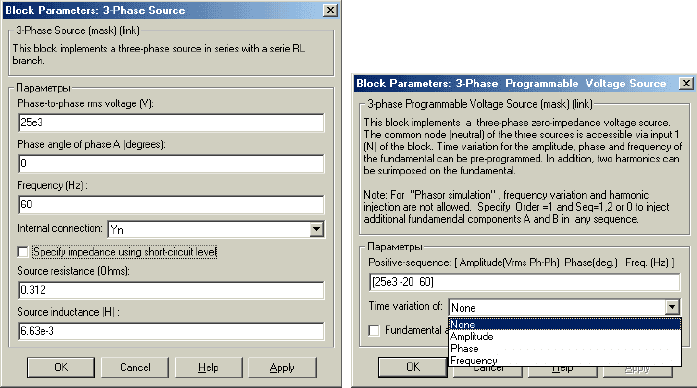
Два последних блока (
3-Phase Source
и
3-Phase Programmable Voltage Source)
имитируют
работу трехфазных источников напряжения. В обоих блоках входом является нейтраль (N), а выходов три –
фазы A, B и C трехфазного напряжения. Окна настраивания их показаны на рис. 10 и 11.
Рис. 10. 10. Окно настраивания блока
3-Phase Source
Рис. 10. 11. Окно настраивания блока
3-Phase Programmable Voltage Source
Общими параметрами настраивания являются:
Phase to phase voltage
напряжение между фазными клеммами в Вольтах
Phase angle of phase A
начальный фазовый угол фазы А в градусах
Frequency
частота изменения напряжения в Герцах
В блоке
3-Phase Source моделируется трехфазный источник с внутренней последовательной RL-
цепью, параметры которой задают два остальных параметра настраивания
Source resistance
активное сопротивление источника в Омах
Source inductance
индуктивность источника в Генри
В блоке
3-Phase Programmable Voltage Source имитируется источник с внутренним импедан-
сом, равным нулю. Блок дополнительно позволяет модулировать (амплитудно, частотно или фазно) напряже-
ние источника (см. рис. 11). Для этого в число параметров настраивания входит параметр
Time variation of,
который имеет следующий список:
None, Amplitude, Phase, Frequency, обозначающие вид модуляции
напряжения. При выборе одного из видов модуляции появляется дополнительный список, позволяющий уста-
новить величины амплитуды ( в соответствующих единицах – Вольтах, градусах или Герцах), частоты и фазо-
вого угла огибающей.
Раздел
Elements
В раздел Elements входят четыре группы блоков (рис. 12).
Elements
(Элементы) содержит блоки, имитирующие элементарные по-
следовательные и параллельные RLC-цепи
Lines
(Линии) содержит блоки, имитирующие линии электропередач
Circuit
Breakers
(Прерыватели тока) содержит блоки, имитирующие различно-
го рода прерыватели тока
Transformers
(Трансформаторы) содержит блоки, имитирующие трансфор-
маторы
Первая группа (
Elements) состоит из таких блоков:
Series RLC Branch
последовательная RLC-цепь
Series RLC Load
последовательная RLC-цепь нагрузки
Parallel RLC Branch
параллельная RLC-цепь
Parallel RLC Load
параллельная RLC-цепь нагрузки