Лекции по курсу - Технология и автоматизация производства электронной аппаратуры
Подождите немного. Документ загружается.


161
реактивным ротором шаг обычно составляет (1,5÷3,0) угловых градуса, а с
активным достигает - 15 º. ШД с активным ротором обладают более
высоким вращающим моментом и обеспечивают фиксацию положения
ротора при обесточенных обмотках.
ШД входят в состав шаговых электроприводов, в частности они
используются в механизмах станков с числовым программным управлением
(ЧПУ). Развитие систем ЧПУ
и телеметрических систем создало широкие
возможности для применения ШД, преобразующих унитарный код
(последовательность импульсов) в пропорциональное перемещение
механизма.
Системы АУ с ШД можно разделить на две группы:
а) системы, в которых ШД выполняют функцию преобразования
унитарного кода в фазомодулированный сигнал или другой вид информации.
К этим системам относятся устройства, в
которых ШД вращает сельсин,
поворотный или дифференциальный трансформатор.
б) системы, в которых ШД используется для привода исполнительного
механизма непосредственно или через усилитель момента. К этим системам
относятся приводы подач станков, старт-стопных лентопротяжных
механизмов, индексирующие устройства счетчиков, управление затворами и
задвижками, синхронизация вращения валов с регулируемым по программе
передаточным отношением.
В
общем случае ШД совместно с управляющим электронным
коммутатором можно рассматривать как систему частотного регулирования
синхронного двигателя с возможностью фиксации углового положения
ротора.
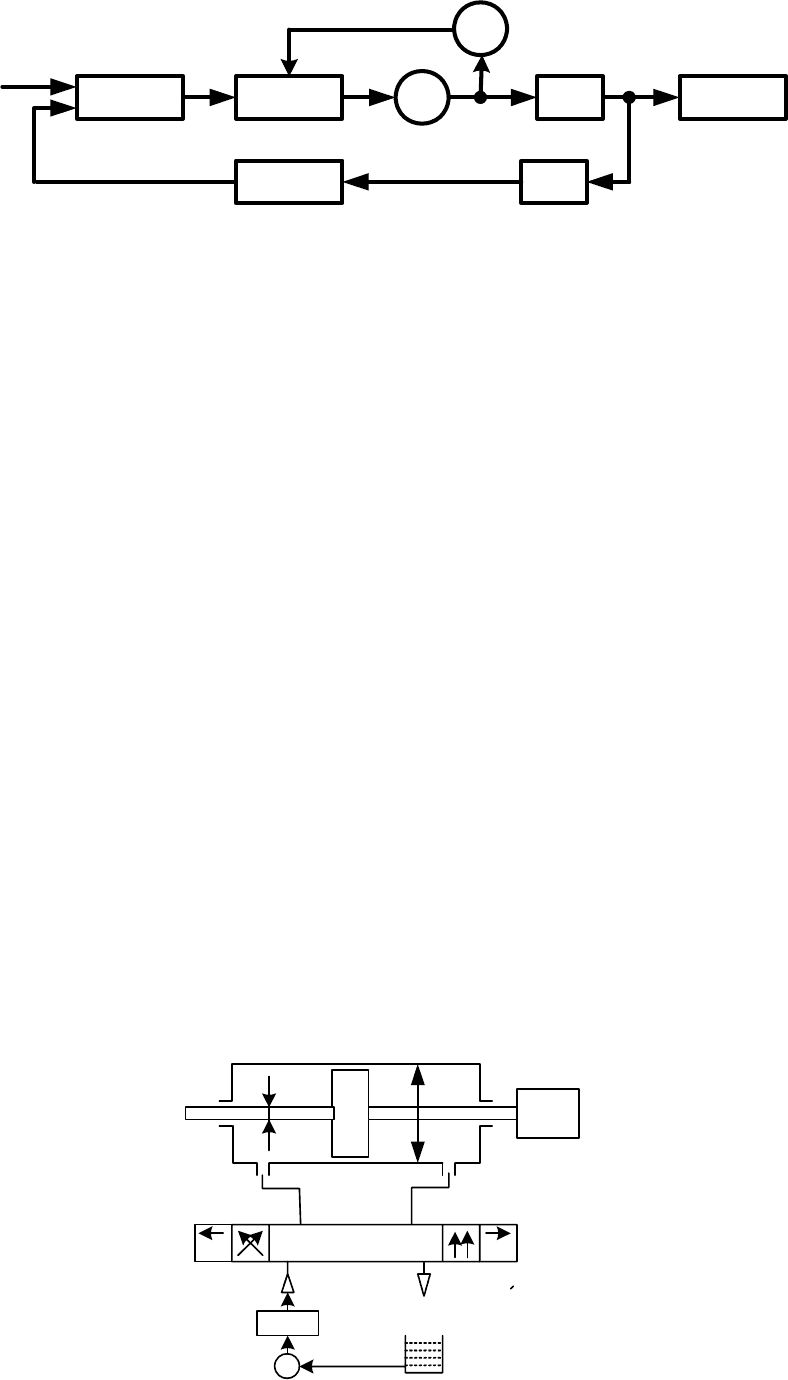
Существуют разомкнутые системы ШД (рис. 17.7) и следящие (рис.
17.8).
коммутатор
усилитель
нагрузка
ШД
Рис. 17.7.
162
Реверсивный
счетчик
усилитель
нагрузка
усилитель
ШД
ТМ
редук
тор
дат
чик
Рис. 17.8.
Преимущества использования ШД:
1.
повышение надежности, за счет сокращения аппаратной
избыточности;
2.
сокращение стоимости по причине п. 1;
3.
упрощение САУ, за счет сокращения функциональных связей;
4.
увеличение точности дискретного перемещения, обусловленное
фиксацией ротора ШД при его остановке.
Недостатки – незначительные вращающие моменты (0,008÷3,0) кгм.
ШД бывают одно-, двух-, трех- и многофазные. Отечественные ШД –
ШДЭ-0,1; ШД-4Б; ШД-5; и др.
Пневмо- (гидро-) привод (см. рис. 17.9) включает прямоходный или
поворотный статический пневмо- (гидро-) цилиндр, шток которого связан с
регулирующим
органом, распределитель воздуха (гидромассы) , устройство
подготовки воздуха (гидромассы) и нагнетающий насос , а в гидроприводе и
емкость с гидромассой (обычно с маслом).
РО
D
d
УПВ
Н
ЭМ
ЭМ
Рис. 17.9.
163
Усилие на штоке
F=πp(D
ц
2
-d
шт
2
)/4, (17.13)
где p – давление. Время срабатывания
T=vL(D
ц
2
-d
шт
2
)/d
др
2
, (17.14)
где d
др
– диаметр дросселирующего отверстия, а L – ход поршня. Скорость
распространения сжатого воздуха
V=(1,0÷1,5) 10
4
мм/сек. (17.15)
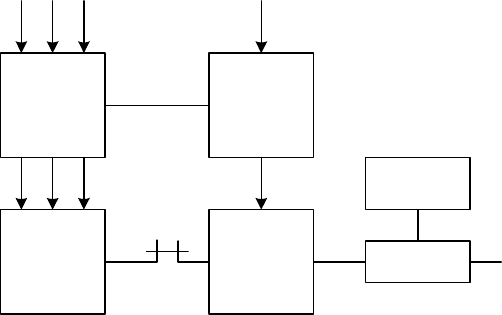
Электромеханический привод (см. рис. 17.10) содержит магнитный
пускатель (МП), асинхронный электродвигатель (АД), коммутатор (К),
автоматическую коробку скоростей (АКС), соединенную через К с МП, через
муфту (М) с АД, а выходным валом, через кинематическую пару
«винт/гайка» (в/г), с РО.
РО
В/ГАКС
Ком
ЛСУсеть
МП
АД
М
Рис. 17.10.
164
ЛЕКЦИЯ 18
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
Простейшей системой автоматического управления (САУ) технологическим
оборудованием (ТО) является система автоматического регулирования (САР).
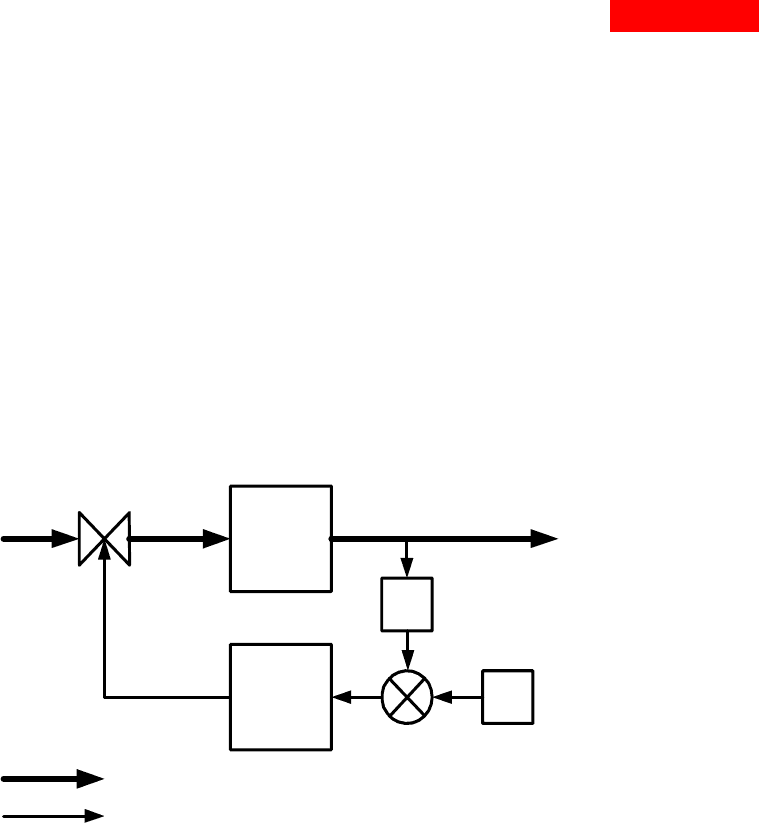
Структурная схема САР (см. рис. 18.1) включает объект регулирования (ОР),
вычислительное звено – вычислитель или регулятор (ВЗ), устройство сравнения
(УС – сумматор), датчик (Д), задатчик (З), регулирующий орган (РО) на рис. 1.
совмещен с исполнительным механизмом (ИМ), объединенные потоками мате-
риального
и информационного характера.
материальный поток
информационный поток
ИМ
ОР
ВЗ
Д
З
и
е
х
з
х
УС
Рис. 18.1.
В САР задатчиком называется устройство, посредством которого настраива-
ется автоматический регулятор (АР) на заданное значение регулируемой вели-
чины, а датчиком – чувствительный элемент, реагирующий на состояние регу-
лируемой величины. Исполнительный механизм (ИМ) с регулирующим орга-
ном (РО) - устройство непосредственно изменяющее количество вещества или
энергии поступающего в ОР при регулировании. ИМ- это позиционер
, позици-
онное реле, усилитель с устройством жесткой обратной связи или сервомотор –
механизм, управляющий перемещением ИМ под воздействием управляющего
устройства АР, а РО – это задвижка, вентиль или др. ограничитель материаль-
ного потока.
Все регуляторы характеризуются:
165
1) равновесным состоянием – установившееся состояние САР, которое ха-
рактеризуется тем, что регулируемая величина сохраняет постоянное значение,
если внешнее возмущение отсутствует и ИМ не перемещается;
2) заданным значением регулируемой величины – значение регулируемой
величины, которое требуется поддерживать постоянным или изменять во вре-
мени по заданному закону;
3) зоной пропорциональности – диапазон изменения сигнала на выходе
ВЗ,
вызывающее максимальное изменение выходного сигнала;
4) диапазоном регулирования – диапазон изменения задания значения регу-
лируемой величины, допускаемого ВЗ (регулятором) и
5) зоной нечувствительности – сумма максимальных абсолютных значений
положительного и отрицательного отклонений регулируемой величины, не вы-
зывающих действия регулятора.
АР выполняет задание, определяемое задающим элементом (задатчиком). По
результату сравнения сигналов с выходов задающего
(задатчика) и чувстви-
тельного (датчика) элементов, регулятор через ИМ и РО действует на ОР.
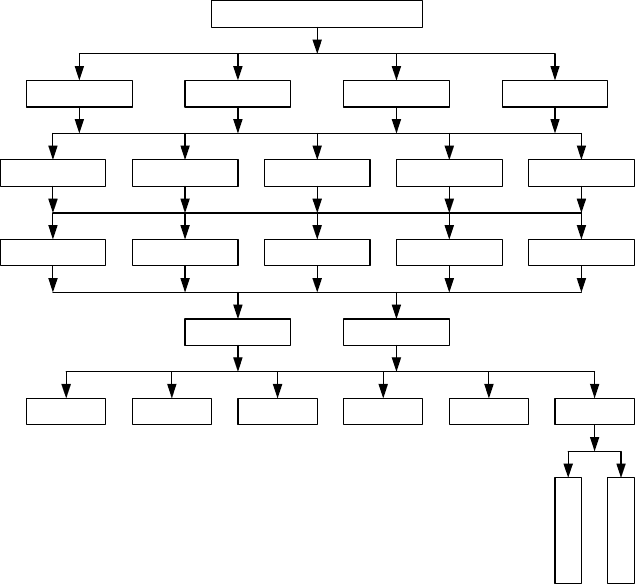
Все АР классифицируют (см. рис. 18.2): а) по виду регулирующего воздей-
ствия, которые делятся на АР прерывистого (импульсного) действия (а1), не-
прерывного действия (а2), с переменной скоростью (а3) и с постоянной скоро-
стью (а4); б) по характеру
регулирующего воздействия – позиционные (б1),
пропорциональные (статические) (б2), астатические (б3), изодромные (б4) и с
предварением (б5); в) по характеру изменения регулируемой величины – стаби-
лизирующие (в1), программные (в2), следящие (в3), копирующие (в4) и само-
настраивающиеся (в5); г) по способу регулирования – непрямого действия (г1)
и прямого действия (г2); регуляторы непрямого действия делятся по виду
по-
требляемой энергии на электрические (д1), электронные (д2), частотно-
ферродинамические (д3), пневматические (д4), гидравлические (д5) и комбини-
рованные (д6), которые, в свою очередь, делятся на электро-гидравлические
(е1) и электро-пневматические (е2).
166
АР
а
б
в
г
д
е
1
2
1
1
1
1
1
2
2
2
2
2
3
3
3
3
4
4
4
4
5
5
56
Рис. 18.2.
Для электрических регуляторов характерны высокое быстродействие, воз-
можность дистанционного, на неограниченное расстояние, регулирования, уме-
ренная взрывоопасность и значительная сложность.
Для пневматических регуляторов характерны умеренное быстродействие,
ограниченность по расстоянию между АР и ОР и высокие пожаро- и взрыво-
опасность.
Для гидравлических регуляторов характерны низкое быстродействие, край-
няя ограниченность по расстоянию между АР
и ОР и значительные (при ис-
пользовании масла) взрыво- и пожароопасность.
Законы регулирования (ЗР). Работа АР определяется ЗР, т.е. зависимостью
между отклонением регулируемой величины от заданной (входной величины) и
перемещением РО (выходная величина). Формирование ЗР осуществляется в
соответствии с алгоритмом преобразования сигнала, проходящего через вычис-
литель (регулятор) в направлении
вход-выход. В ряде случаев в формировании
ЗР участвуют сигналы различных обратных связей «жестких», если сигнал про-
порционален регулирующему воздействию, и «гибких», если в оператор входят
производные.
167
В реальных системах ЗР выполняется с известными ограничениями, которые
определяются областью нормальных режимов работы ОР, регулятора или кор-
ректирующих звеньев и др. элементов системы.
В системах промышленной автоматики наибольшее распространение полу-
чили следующие ЗР:
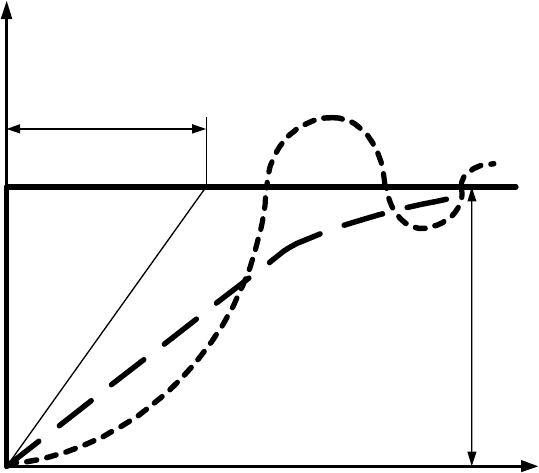
1) пропорциональный, описываемый
и=K
1
ε,
(18.1)
реализуемый статическим или П- регулятором с параметром настройки К
1
,
имеющий передаточную функцию
W(p)=K/(1+T
1
p+T
2
2
p
2
)
(18.2)
и переходную характеристику
h(t)
t
T
1
K
p
1
0
0, 1 и 2 - порядок инерционности
2
Рис. 18.3.
2) интегральный, –
и=K
2
∫εdt,
(18.2)
реализуемый астатическим или И- регулятором с параметром настройки K
2
,
имеющий передаточную функцию
W(p)=1/Т
и
р(1+Т
1
р+Т
2
2
р
2
)
(18.3)
и переходную характеристику
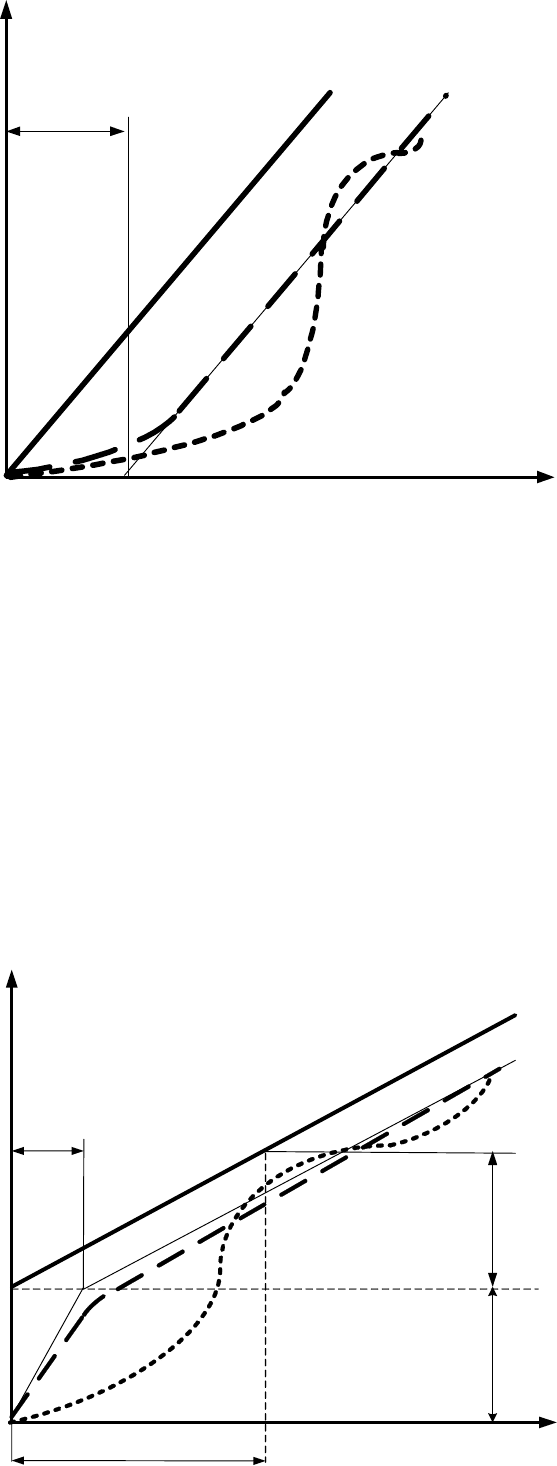
168
h(t)
t
T
1
1
0
0, 1 и 2 - порядок инерционности
2
Рис. 18.4.
3) пропорционально-интегральный –
и=K
1
ε+K
2
∫εdt=K
1
(ε+1/Т
и
∫εdt),
(18.4)
реализуемый изодромным или ПИ- регулятором с параметрами настройки K
1
и
Т
и
=К
1
/К
2
; имеющий передаточную функцию
W(р)=Кр(1+Т
и
р)/Т
и
р(1+Т
1
р+Т
2
2
р
2
)
(18.5)
и переходную характеристику
h(t)
t
T
1
K
p
1
0
0, 1 и 2 - порядок инерционности
2
K
p
T
и
169
Рис. 18.5.
Введение в закон АР интегрирующих элементов позволяет статическую ошиб-
ку свести к нулю.
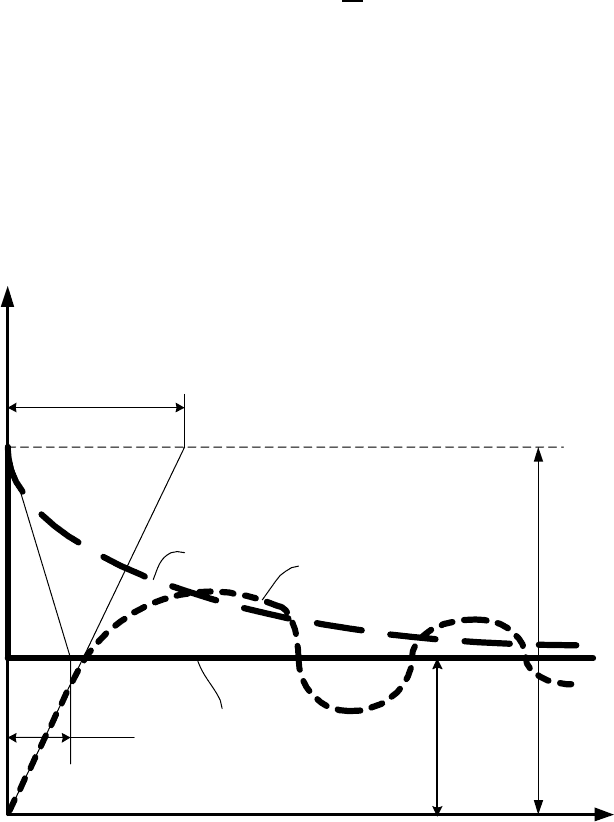
4) пропорционально-дифференциальный –
и=K
1
ε+K
3
dε/dt;
(18.6)
имеющий передаточную функцию
W(р)=Кр(1+Т
пр
р)/Т
и
р(1+Т
1
р+Т
2
2
р
2
)
(18.7)
и переходную характеристику
h(t)
t
T
1
K
p
1
0
0, 1 и 2 - порядок инерционности
2
T
2
2
/T
1
K
p
T
u
/T
1
Рис. 18.6.
5) пропорционально-интегрально-дифференциальный, -
и=K
1
ε+K
2
∫εdt+K
3
dε/dt=K1(ε+1/Т
и
∫εd +Т
п
dε/dt),
(18.8)
реализуемый изодромным с предварением или ПИД- регулятором с параметра-
ми настройки К
1
, Т
и
=К
1
/К
2
и Т
п
=К
3
/К
1
, имеющий передаточную функцию
W(р)=Кр(1+Т
и
+Т
и
Т
пр
р
2
)/Т
и
р(1+Т
1
р+Т
2
2
р
2
)
(18.9)
и переходную характеристику
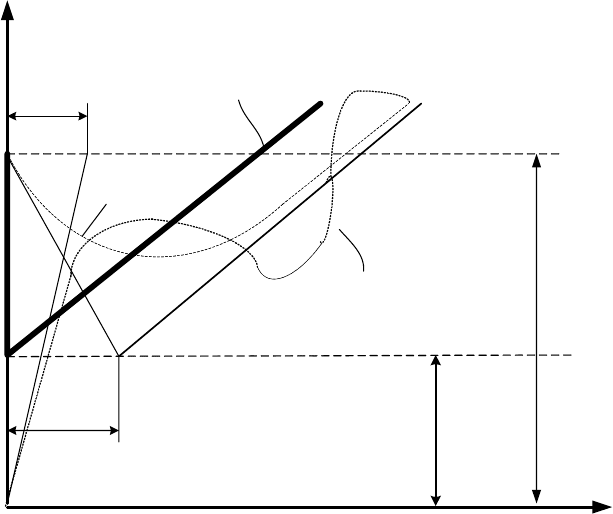
170
h(t)
t
T
1
K
p
1
0
0, 1 и 2 - порядок инерционности
2
T
2
2
/T
1
K
p
T
u
/T
1
Рис. 18.7.
Дифференциальные уравнения разных АР отличаются только полиномом
правой части, определяющим ЗР. Дифференциальное уравнение линейного ре-
гулятора в операторной форме, в общем виде, может быть записано как
(1+Т
1
р+Т
2
2
р
2
+ … +Т
n
n
р
n
)u=(С
0
/р+С
1
+С
2
р+С
3
р
2
+ …)ε, (18.10)
где: и – выходная величина (регулирующее воздействие); ε – входная величина
(отклонение регулируемой величины); С
0
/р – коэффициент, означающий введе-
ние в ЗР интеграла от ε; С
1
- коэффициент пропорциональности, означающий
введение в ЗР пропорциональной составляющей от ε; С
2
и С
3
р
2
– коэффициен-
ты, соответствующие введению в ЗР первой и второй производных (скорости и
ускорения) отклонения регулируемой величины ε; Т
1
, …, Т
n
– постоянные вре-
мени.
Полином левой части дифференциального уравнения характеризует инерци-
онность регулятора. В зависимости от порядка левой части регуляторы бывают
безынерционными, с инерционностью первого, второго и более высоких поряд-
ков.
Для упрощения описания используют дополнительные обозначения:
К
р
=С
1
=1/δ
р
– коэффициент усиления регулятора (δ
р
– статизм регулятора);