Мирошник И.В. Теория автоматического управления. Линейные системы
Подождите немного. Документ загружается.

220
Глава
7.
Методы
управления
и
синтез
еДУ
и,
следовательно,
установившаяся
ошибка
системы
будет
(7.61)
где
М
!
-
прямоугольная
матрица
размера
n
Х
nj.
Для
получения
абсолютной
точности
необходимо
обеспечить
Уу
=
О,
что,
вообще
говоря,
не
требует
получения
нулевого
вектора
Ху.
Матрица
М!
и
искомая
матрица
прямых
связей
L
j
находятся
следующим
образом.
Из
уравнения
(7.61)
и
условия
получения
абсолютной
точности
системы
по
выход
ной
переменной
(Уу
=
О)
запишем
СМ!
=
О.
(7.62)
ПродиФФеренцировав
по
времени
выражение
(7.60)
и
подставив
(7.28),
получим
(7.63)
Из
уравнения
(7.57)
после
подстановки
(7.60)
найдем
(7.64)
Приравнивая
правые
части
(7.63)
и
(7.64),
получаем
матричное
уравнение
Силь
вестра
(7.65)
Таким
образом,
матрица
M
j
,
использующаяся
для
расчета
вектора
Xy(t)
по
фор
муле
(7.60),
и
матрица
прямых
связей
комбинированного
регулятора
(7.56)
рас
считываются
как
решения
системы
матричных
уравнений
(7.62)
и
(7.65).
Отметим,
что
задача
стабилизации
ОУ
в
смещенной
точке
Х
=
х*
=1=
о
является
простейшим
частным
случаем
рассматриваемой
далее
задачи
слежения
(см.
также
пример
7.11).
7.3.3.
Синтез
следящих
систем
Слежением
называется
режим
работы
системы
управления,
при
котором
поддер
живается
заданный
закон
изменения
выходной
переменной
У
= y*(t)
или
состояния
ОУ
х
= x*(t),
где
x*(t)
является
вектором
состояния
задающего
блока
(7.26)-
(7.27).
Задача
слежения
сводится
к
стабилизации
нулевого
значения
ошибки
сле
жения
€ =
у*
-
У
или
соответствующего
вектора
ошибок
по
состоянию
е
(см.
ниже).
Задача
синтеза
следящей
системы
обычно
решается
без
учета
влияния
внешней
среды,
т. е.
в
предпо~ожении,
что
f(t)
=
О.
При
этом
уравнения
объекта
управления
можно
записать
в
виде
(7.30), (7.25).
7.3.
Регуляторы
и
системы
управления состоянием
221
Анализ
частных
случаев.
В
ряде
простейших
случаев
размерность
вектора
х·
совпадает
с
размерностью
вектора
х:
dim
х*
= dim
х
=
n,
и
вектор
ошибок
слежения
определяется
выражением
е
=
х*
-
х.
(7.66)
Тогда
модель
ошибок
получается
дифференцированием
по
времени
выражения
(7.66)
и
после
подстановки
уравнений
(7.30),
(7.28)
и
(7.66)
принимает
вид
ё
=
Ае
-
Вu
+
~Ax*
.
(7.67)
где
~A
=
А*
-
А.
Модель
имеет
структуру
возмущенной
системы
(7.24),
где
роль
возмущения
играет
компонента
~Ax*.
Проnорциональный
регулятор
состояния
в
подобных
следящих
системах
выра
батывает
управляющие
сигналы,
пропорциональные
вектору
отклонения
е,
т.
е.
описывается
уравнением
и
=
Ке.
(7.68)
Алгоритм
(7.68)
можно
записать
в
развернутой
форме
(7.69)
где
Замечание
7.2.
Если
в
качестве
координат
xi
вектора
х
выбираются
фазовые
пе
ременные
у,
у,
..
.
,y*(n-l)
(см.
замечание
7.1),
а
в
качестве
координат
вектора
х*
-
функции
у*,
у*,
...
,y*(n-l),
то
ei
=
e(i-l)
=
y*(i-l)
_
y(i-l).
Тогда
формула
(7.69)
соответствует
описанию
обобщенного
ПД-регулятора
выхода
(ср.
(7.18)):
После
подстановки
(7.68)
модель
ошибок
(7.67)
принимает
вид
(7.70)
где
Ас
-
матрица
замкнутой
системы.
Выбор
матрицы
обратной
связи
К,
осу
ществленный
в
7.3.1,
обеспечивает
заданные
динамические
показатели
модели
(7.70).
Для
нахождения
установившейся
ошибки
е
у
и
оценки
точности
слежения
используется
процедура,
аналогичная
рассмотренной
в
7.3.2.
Так
как
det
Ас
=F
о,
то
из
условия
ё
=
О
получим
приближенные
значения
уставившихся
ошибок
f"V
A-
1
ЛА
*
е
у
= -
с
u Х ,
(7.71
)

222
Глава
7.
Методы
управления
и
синтез
еДУ
Выражения
показывают,
что
в
общем
случае
пропорциональный
регулятор
не
обес
печивает
абсолютной
точности
решения
задачи
слежения.
Проnорционально-интегральный
(астатический)
регулятор
состояния
дополняет
структуру
системы
интегральными
связями
и
описывается
выражением
1
и
=
Кре
+
-(Kle).
р
(7.72)
Интегральная
составляющая'
алгоритма
(7.72)
обеспечивает
с
течением
времени
частичную
или
полную
компенсацию
возмущающего
влияния
задающих
воздей
ствий
(и
~озмущениЙ).
При
использовании
комбинированного
регулятора
и
=
Ех*
+Ке
модель
ошибок
(7.67)
прин~мает
вмд
(рис.
7.18)
ё
=
Асе
+
(~A
-
BL)x*.
х*
е
Рис.
7.18.
Модель
ошибок
комбин~рованной
системы
(частный
случай)
(7.73)
(7.74)
Рассмотрим
задачу
слежения
ОУ
(7.30)
за
задающим
воздействием
x*(t),
которое
вырабатывается
ЗБ
специального
вида.
Пусть
матрица
А*
модели
(7.26)
имеет
вид
А*
=
A+BL
(рис.
7.19).
Модель
ошибок
получается
дифференцир.ованием
по
времени выраже
ния
(7.66).
После
подстановки
уравнений
(7.26)
и
(7.30)
модель
принимает
вид
ё
=
Ае
-
Вu
+
BLx*,
(7.75)
т.
е.
приобретает
форму
возмущенной
модели
типа
(7.24),
где
роль
возмущения
иг
рает
компонента
BLx*.
При
использовании
nроnорционального
регулятора
(7.68)
получаем
модель
ошибок
вида:
ё
=
Асе
+
BLx*.
(7.76)

7.3.
Регуляторы
и
системы
управления состоянием
223
Установившиеся
значения
ошибок
находятся
из
выражений
f'V
A-
1
BL
'"
f'V
CA-1BL
'"
е
у
= -
с
Х
,
€y
= -
с
Х
•
(7.77)
Модель
ошибок
комбинированной
системы,
представленной
на
рис
7.19,
получает
ся
подстановкой
(7.73)
в
(7.75)
и
принимает
вид
(7.78)
Из
последнего
выражения
видно,
что
е
у
=
о, и,
следовательно,
введение
прямых
связей
по
задающему
воздействию
обеспечивает
в
установивwемся
режиме
Х
у
=
=
х"',
т.
е.
абсолютную
точность
слежения.
Рис.
7.19.
Комбинированная
следящая
система
(частный
случай)
Прuмер
7.11.
Как
частный
случай
задачи
слежения
рассмотрим
задачу
стабили
зации
объекта
второго
порядка
(7.35)
(пример
7.8)
в
точке
у
=
у*,
у
=
у*
=
о.
Значения
у'"
и
у'"
можно
рассматривать
как
простейшие
задающие
воздействия,
вырабатываемые
генератором
у'"
=
О
(7.79)
с
начальными
значениями
у'"
(о)
=
уо,
'1/
(о)
=
о,
модель
БеБ
которого
имеет
вид
x~
=
Х2'
3;2
=
о,
у*
=
x~,
где
x~
=
у"';
Х2
=
.
'"
у,
или
(7.26)-(7.27),
где
х'"
=
I
xi
I I
у'"
I
Х2
у*'
А*
= I
~ ~
1,
С*
=
11
О
1·
(7
:80)
(7.81)
224
Глава
7.
Методы
управления
и
синтез
едУ
Определим
ошибку
стабилизации
как
с
=
у*
-
у.
Вычитая
(7.35)
из
(7.79)
и
принимая
во
внимание,
что
у*
=
О,
получаем
модель
ошибки
€ +
аl
€ +
а2С
=
а2У*
-
Ьu.
(7.82)
Отметим,
что
уравнение
(7.82)
может
быть
записано
в
форме
вев
как
(7.83)
где
или
в
виде
(7.74),
где
Рассмотрим
пропорциональный
алгоритм
управления
(7.84)
или
Найдем:
€ +
(аl
+ bk
1
)€
+
(а2
+
bk2)C
=
а2У*.
(7.85)
В
установившемся
режиме
получим
и,
следовательно,
Су
=
(7.86)
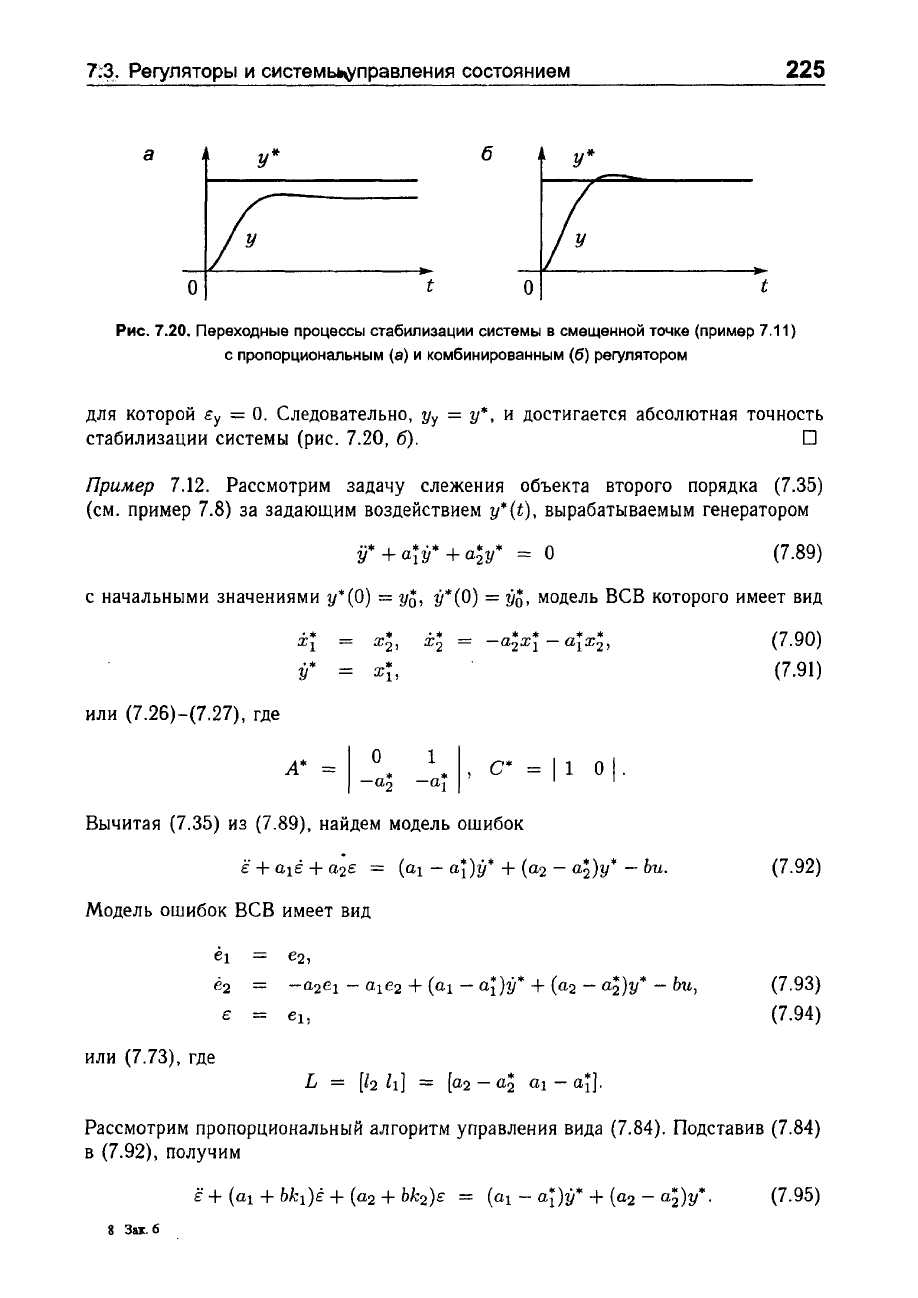
т.
е.
система
характеризуется
ненулевой
установившейся
ошибкой
(рис.
7.20,
а).
Астатический
(пропорционально-интегральный)
регулятор
строится
по
схеме,
рас
смотренной
в
примере
7.9,
и
обеспечивает
абсолютную
точность
стабилизации.
Комбинированный
регулятор
описывается
выражением
(7.87)
Подстановка
(7.87)
в
(7.82)
дает
автономную
модель
ошибок
замкнутой
системы
(7.88)
7~~..
Регуляторы
и
систеМЬе\.Управления
состоянием
225
а
у*
б
у*
о
t
о
t
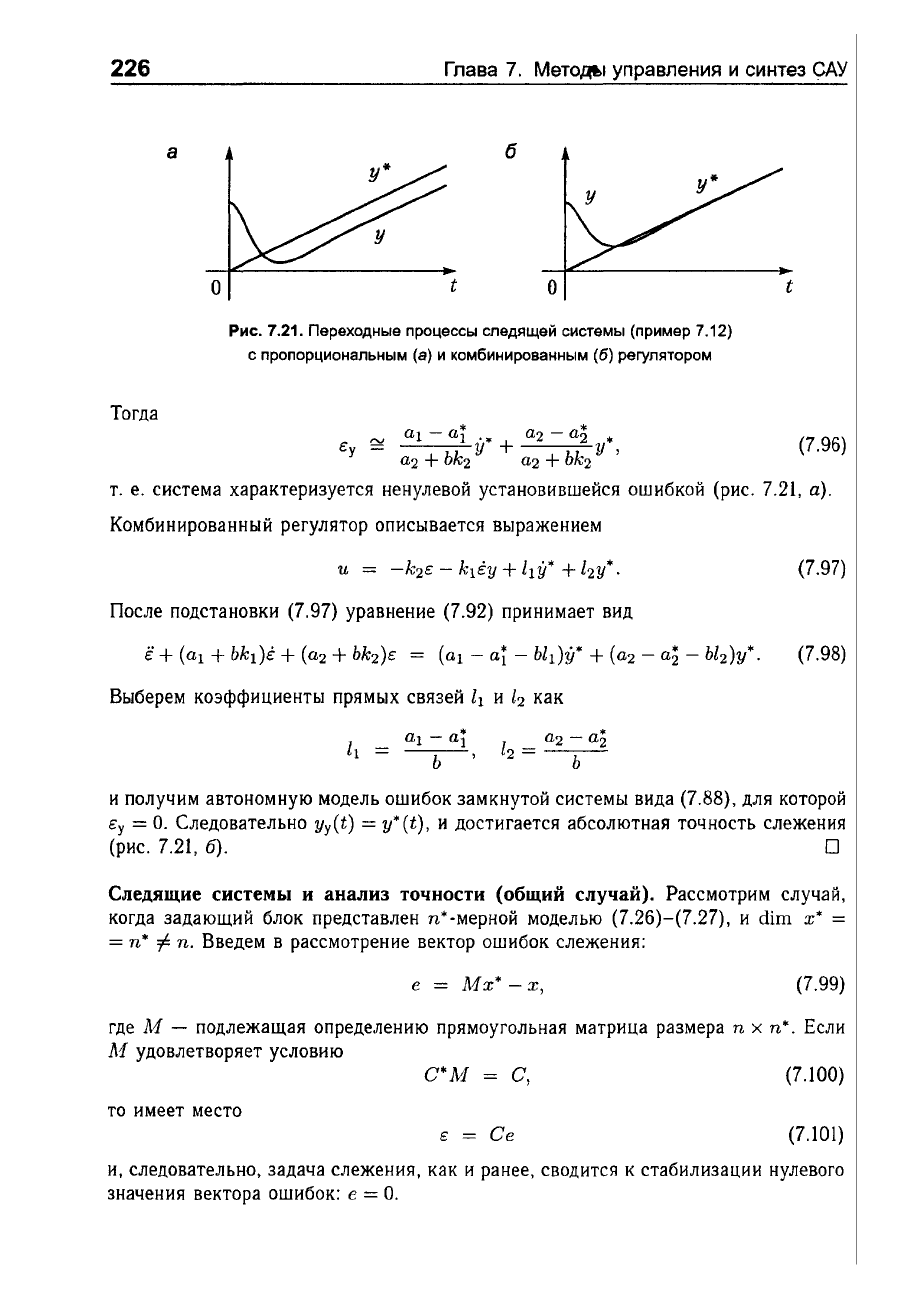
Рис.
7.20.
Переходные
процессы
стабилизации
системы
в
смещенной
точке
(пример
7.11)
с
пропорциональным
(а)
и
комбинированным
(6)
регулятором
для
которой
€y
=
О.
Следовательно,
Уу
=
у*,
и
достигается
абсолютная
точность
стабилизации
системы
(рис.
7.20,
б).
О
Прuмер
7.12.
Рассмотрим
задачу
слежения
объекта
второго
порядка
(7.35)
(см.
при
мер
7.8)
за
задающим
воздействием
y*(t),
вырабатываемым
генератором
(7.89)
с
начальными
значениями
у*
(О)
=
Уа,
у*
(О)
=
Уа,
модель
ВСВ
которого
имеет
вид
или
(7.26)-(7.27),
где
x~
х;,
у*
=
x~,
-a;x~
-
a~
х;,
Вычитая
(7.35)
из
(7.89),
найдем
модель
ошибок
Модель
ошибок
ВСВ
имеет
вид
еl
е2,
е2
-а2еl
-
аlе2
+
(а1
-
a~)y*
+
(а2
-
а;)у*
-
Ьu,
или
(7.73),
где
(7.90)
(7.91)
(7.92)
(7.93)
(7.94)
Рассмотрим
пропорциональный
алгоритм
управления
вида
(7.84).
Подставив
(7.84)
в
(7.92),
получим
(7.95)
8
Зах.
6
226
Глава
7.
MeToДt>1
управления
и
синтез
едУ
а
о
Тогда
б
t
о
Рис.
7.21.
Переходные
процессы
следящей
системы
(пример
7.12)
с
пропорциональным
(а)
и
комбинированным
(б)
регулятором
t
f"V
а1
-
ai
.
'"
а2
-
а2
*
е
у
= bk
У
+ bk
У
, (7.96)
а2
+ 2
а2
+ 2
т.
е.
система
характеризуется
ненулевой
установившейся
ошибкой
(рис.
7.21,
а).
Комбинированный
регулятор
описывается
выражением
(7.97)
После
подстановки
(7.97)
уравнение
(7.92)
принимает
вид
(7.98)
Выберем
коэффициенты
прямых
связей
[1
и
[2
как
l -
а1
-
ai
1 -
Ь
'
и
получим
автономную
модель
ошибок
замкнутой
системы
вида
(7.88),
для
которой
е
у
=
О.
Следовательно
Yy(t)
= y*(t),
и
достигается
абсолютная
точность
слежения
(рис.
7.21,
б).
О
Следящие
системы
и
анализ
точности
(общий
случай).
Рассмотрим
случай,
когда
задающий
блок
представлен
n*-мерной
моделью
(7.26)-(7.27),
и
dim
х*
=
=
n*
-1=-
n.
Введем
в
рассмотрение
вектор
ошибок
слежения:
e=Mx*-х,
(7.99)
где
М
-
подлежащая
определению
прямоугольная
матрица
размера
n
х
n*.
Если
А1
удовлетворяет
условию
С*М
=
С,
(7.100)
то
имеет
место
е
=
Се
(7.101)
и,
следовательно,
задача
слежения,
как
и
ранее,
сводится
к
стабилизации
нулевого
значения
вектора
ошибок:
е
=
О.
7'.3.
Регуляторы
и
системы
управления
состоянием
227
Дифференцирование
по
времени
уравнения
(7.99)
и
подстановка
(7.30)
и
(7.26)
позволяют
получить
модель
ошибки
ё
=
Ае
+
(МА*
-
АА1)х*
-
Вu,
(7.102)
выход
которой
описывается
уравнением
(7.l01).
Если
матрица
N!
является,
кроме
того,
решением
алгебраического
уравнения
типа
Сильвестра
МА*-АМ
=
BL,
(7.103)
где
L -
некоторая
матрица-строка,
то
модель
ошибок
(7.102)
принимает
вид
ё
=
Ае
-
Вu
+
BLx*.
(7.104)
Структура
полученной
модели
с
выходом
(7.101)
аналогична
возмущенной
модели
ОУ
(7.24)-(7.25),
где
роль
возмущения
играет
компонента
BLx*.
Поэтому
для
анализа
точности
и
синтеза
регуляторов
используются
процедуры,
аналогичные
рассмотренным
в
7.3.2.
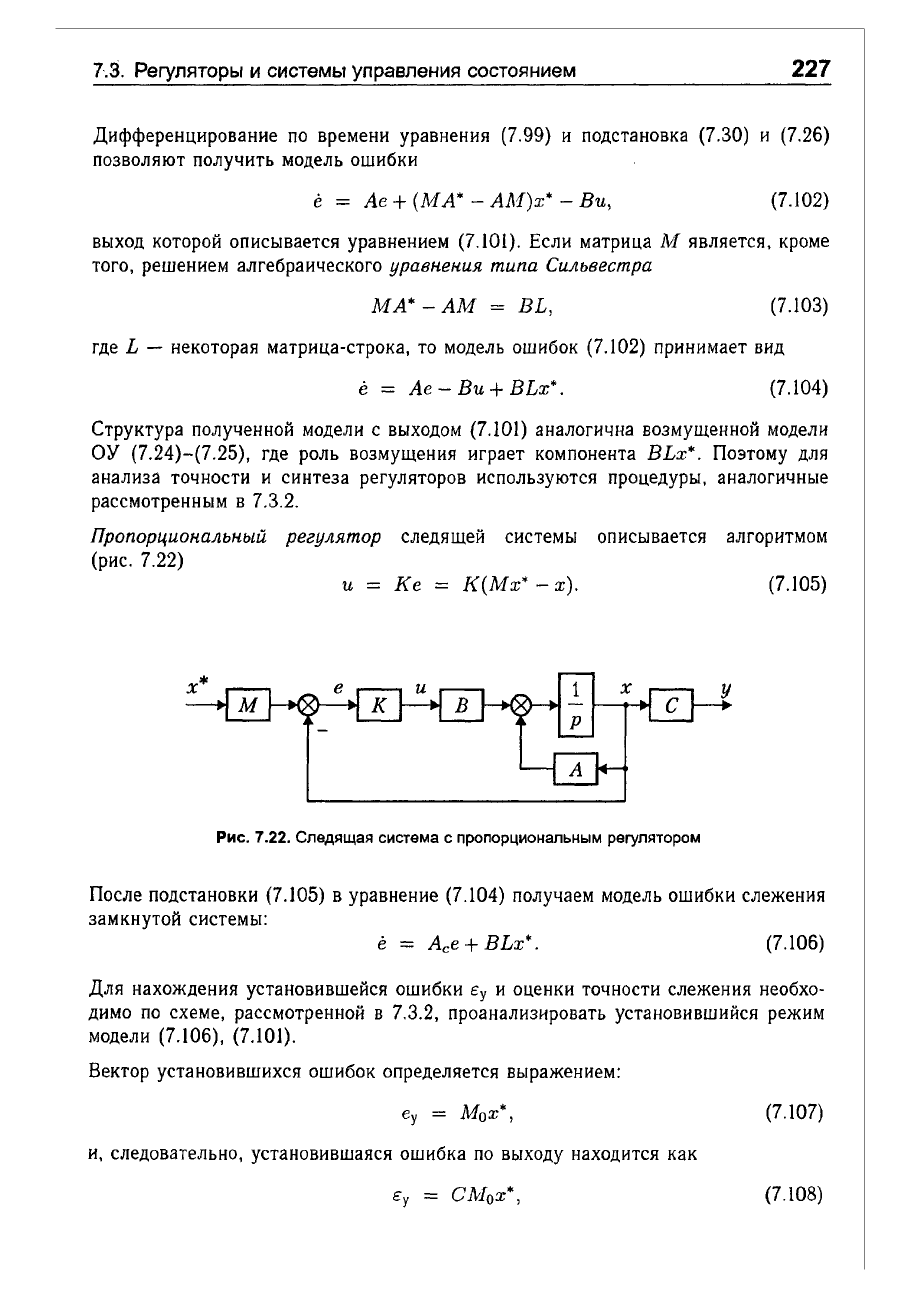
Проnорцuональный
регулятор
следящей
системы
описывается
алгоритмом
(рис.
7.22)
и
=
Ке
= J{(Mx* -
х).
(7.105)
Рис.
7.22.
Следящая
система
с
пропорциональным
регулятором
После
подстановки
(7.105)
в
уравнение
(7.104)
получаем
модель
ошибки
слежения
замкнутой
системы:
ё
=
Асе
+
BLx*.
(7.106)
Для
нахождения
установившейся
ошибки
f
y
и
оценки
точности
слежения
необхо
димо
по
схеме,
рассмотренной
в
7.3.2,
проанализировать
установившийся
режим
модели
(7.106),
(7.101).
Вектор
установившихся
ошибок
определяется
выражением:
(7.107)
и,
следовательно,
установившаяся
ошибка
по
выходу
находится как
f
y
=
C1v!ox*,
(7.108)
228
Глава
7.
Методы
управления
и
синтез
еДУ
где
М
О
-
подлежащая
определению
прямоугольная
матрица
n
х
n*.
Продифферен
цировав
по
времени
выражение
(7.107)
и
подставив
(7.26),
получим
е
у
=
МоА*х*.
(7.109)
Из
уравнения
(7.106)
после
подстановки
(7.107)
найдем
(7.110)
Приравнивая
правые
части
(7.109)
и
(7.110),
получаем
матричное
уравнение
Силь-
вестра
МоА*
-
АсМ
о
=
BL,
решением
которого
и
является
искомая
матрица
М
о
.
(7.111)
Таким
образом,
для
анализа
системы
с
пропорциональным
регулятором
и
оценки
ее
точности
необходимо
выполнить
следующее.
1.
Решить
уравнения
(7.100), (7.103)
и
найти
матрицы
М
и
L.
2.
Решить
уравнение
(7.111)
и
найти
матрицу
М
о
.
3.
Рассчитать
вектор
е
у
по
формуле
(7.107)
и
установившуюс~
ошибку
Су
по
формуле
(7.10В).
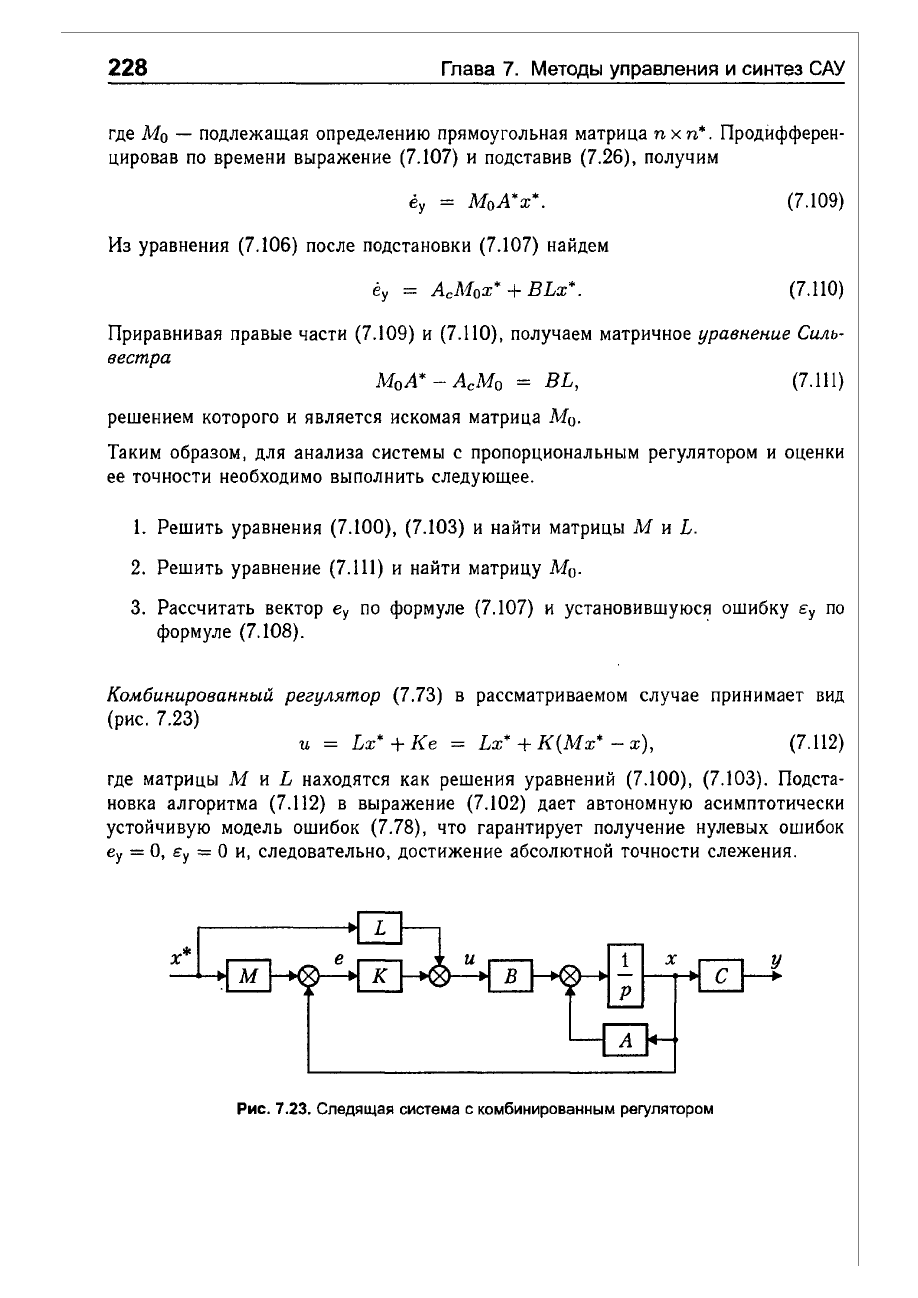
Комбинированный
регулятор
(7.73)
в
рассматриваемом
случае
принимает
вид
(рис.
7.23)
и
= Lx* +
!(е
= Lx* +
К(Мх*
-
х),
(7.112)
где
матрицы
М
и
L
находятся
как
решения
уравнений
(7.100), (7.103).
Подста
новка
алгоритма
(7.112)
в
выражение
(7.102)
дает
автономную
асимптотически
устойчивую
модель
ошибок
(7.78),
что
гарантирует
получение
нулевых
ошибок
е
у
=
О,
Су
=
О
и,
следовательно,
достижение
абсолютной
точности
слежения.
х*
Рис.
7.23.
Следящая
система
с
комбинированным
регулятором
7.4.
Синтез
наблюдателей
состояния
229
7.4.
Синтез
наблюдателей
состояния
Задача
наблюдения
формулируется
как
задача
синтеза
алгоритма,
обеспечива
ющего
оценивание
неизмеряемых
переменных
состояния объекта
управления
Xi,
а
может
быть,
}1
переменных
состояния
внешней
среды
и
других
внешних
объектов
[2,
3,
20].
Соответствующий
блок
(алгоритм)
системы
управления,
предназначен
ный
для
оценивания
переменных
состояния
по
имеющейся
информации
о
других
переменных
системы,
называется
наблюдателем
состояния
(см.
1.5.3).
Различают
схемы
наблюдения
полного,
расширенного
и
пониженнога
(редуциро
ванного)
порядков.
Полный
наблюдатель
(порядка
n)
обеспечивает
восстановле
ние
n
переменных
состояния
ОУ
с
использованием
измерений
входных
и
выходных
переменных.
Расширенный
наблюдатель
используется
в
тех
случаях,
когда
необ
ходимо
оценить
не
только
переменные
состояния
ОУ,
но
и
переменные
состояния
внешней
среды.
Наконец,
редуцированный
наблюдатель
предназначен
для
оценки
только
части
переменных
состояния
(объекта
или
внешней
среды),
что
определяет
возможность
получения
схемы
наблюдения
пониженнога
порядка
[20,
29].
7.4.1.
Наблюдатель
полного
порядка
Будем
рассматривать
задачу
синтеза
полной
схемы
наблюдателя для
невозмущен
нога
объекта
управления
± =
Ах+Ви,
у
=
Сх.
(7.113)
(7.114)
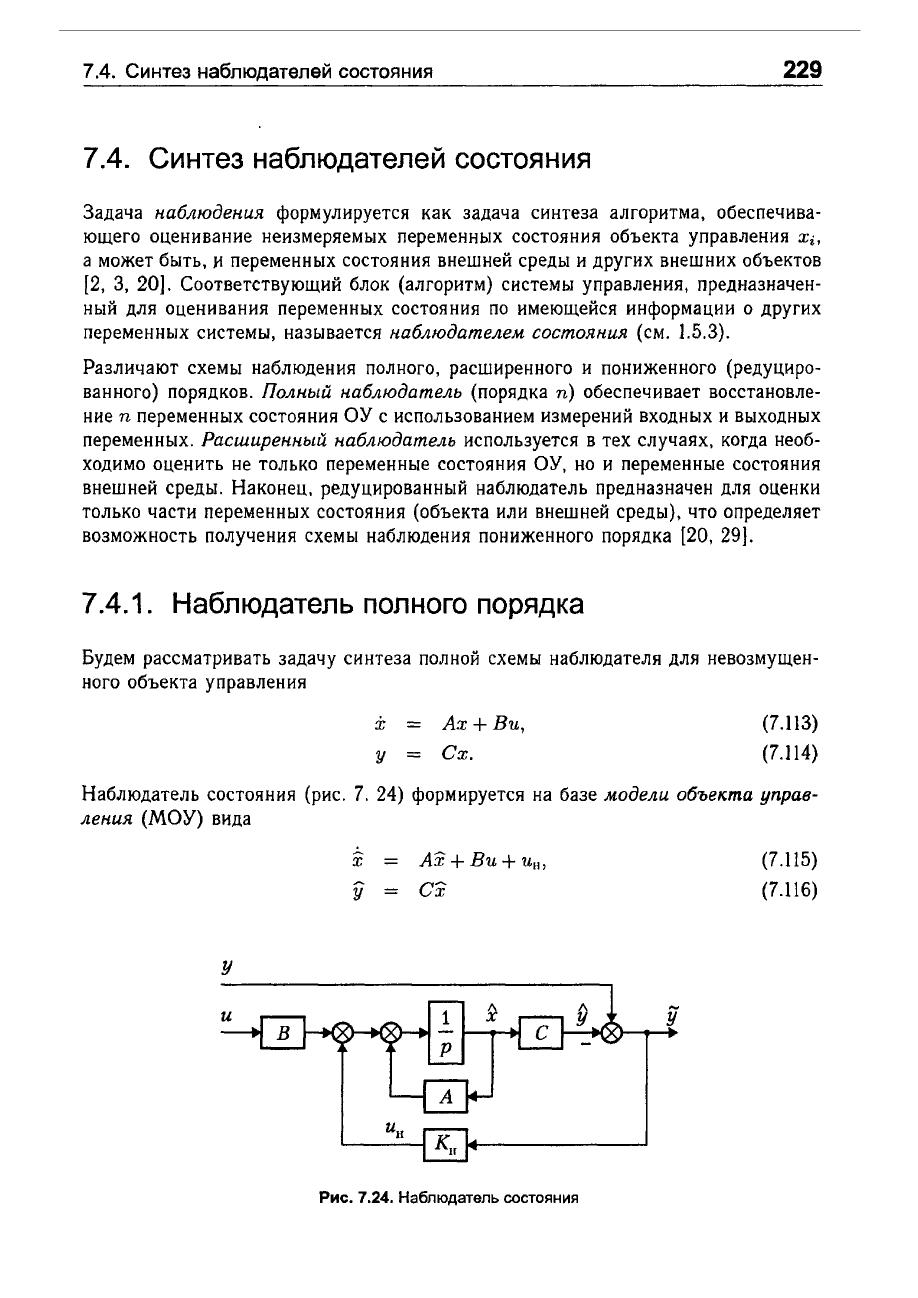
Наблюдатель
состояния
(рис.
7.
24)
формируется
на
базе
модели
объекта
управ
ления
(МОУ)
вида
у
х
=
Ах+Ви+и
н
,
fj
=
Сх
Рис.
7.24.
Наблюдатель
состояния
(7.115)
(7.116)