Muga G. Time in Quantum Mechanics - Vol. 2
Подождите немного. Документ загружается.

2 Time Dependent Schr
¨
odinger Equation 21
which is the non-relativistic wave equation, again obtained without introducing
operator-valued time or momentum.
2.4 The Single Photon and Two Photon Wave Functions
The photon wave function concept really comes into its own when solving problems
involving photon–photon correlations. Then, as is explained in [8], the two photon
wave function
ψ
(2)
(r
1
, t
1
; r
2
, t
2
) ≡0|
ˆ
E(r
2
, t
2
)
ˆ
E(r
1
, t
1
)|Ψ (2.27)
is the subject of interest. Under some conditions this may be written in terms of
single photon wave functions, as in the case of two photon cascade discussed below.
Some of the calculational details will be given since the physics (and the devil) is in
the details.
Consider first the single photon wave function. From Eqs. (2.3) and (2.4) and
ignoring polarization, we find
0|
ˆ
E(r, t)|ψ
γ
=
2ε
0
V
k
(ν
k
)
1/2
g
k
e
−iν
k
t
e
ik·(r−r
0
)
1
(ν
k
−ω) +iΓ/2
. (2.28)
We now evaluate this function by converting the sum into an integral. The φ- and θ-
integrations can be carried out by choosing a coordinate system in which the vector
r−r
0
points along the z-axis. We then carry out the integration over |k|by evaluating
the density of states and matrix elements at resonance. We are left with the integral
∞
−∞
dν
k
e
−iν
k
t+iν
k
Δr/c
(ν
k
−ω) +iΓ/2
,
which is evaluated via contour methods and where Δr =|r − r
0
| is the distance
from the atom located at position r
0
to the detector. For t <Δr/c, the contour lies
in the upper half-plane and if t >Δr/c, in the lower half-plane. On performing the
integration, we find
0|
ˆ
E(r, t)|ψ
γ
=
E
Δr
Θ
t −
Δr
c
e
−i(t−
Δr
c
)(ω−iΓ/2)
, (2.29)
where Θ is a unit step function and E is an overall constant with the units of electric
field.
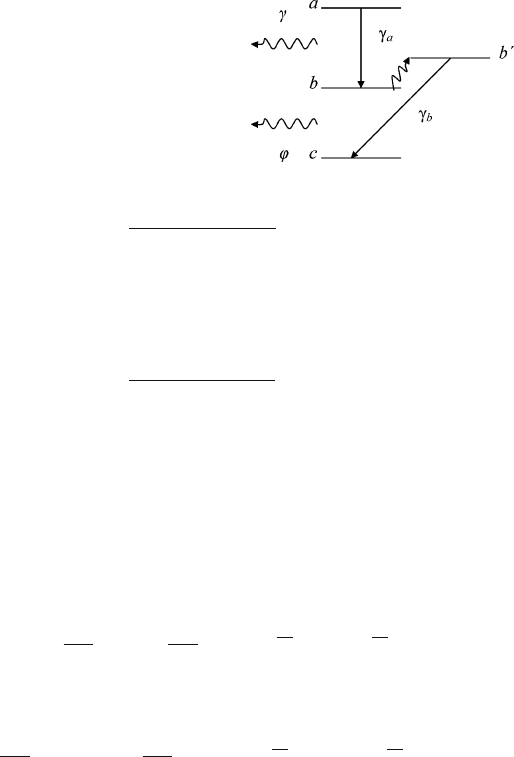
Next we consider the problem of “interrupted” emission, see Fig. 2.3. The first
photon, associated with the a ↔ b transition, is described in the long time limit by
our “old friend”
22 M.O. Scully
Fig. 2.3 Figure illustrating
decay of atom excited to state
a at a rate γ
a
to non-decaying
level b. Upon detection of
a → b photon, population in
level b is transferred to b
by
means of an external field
indicated by wavy line.Level
b
decays to c at rate γ
b
|γ =
k
g
a,k
e
−ik·r
(ω
ab
−c|k|) −iγ
a
|1
k
. (2.30)
Likewise the second photon, associated with the b
→ c transition, is given in
the long time limit by
|φ=
q
g
b,q
e
−i(q·r−cqt
0
)
(ω
ac
−c|q|) −iγ
b
|1
q
, (2.31)
where t
0
is the time of detection of γ photon and the transfer from b → b
.
Using (2.30) and (2.31), it is easy to calculate the two photon wave function
Ψ
(2)
(r
1
, t
1
; r
2
, t
2
) as defined by (2.27). We find
ψ
(2)
(r
1
, t
1
; r
2
, t
2
) = ψ
γ
(r
1
, t
1
)ψ
φ
(r
2
, t
2
) + ψ
φ
(r
1
, t
1
)ψ
γ
(r
2
, t
2
) , (2.32)
where
ψ
γ
(r
i
, t
i
) =
ε
γ
Δr
i
Θ
t
i
−
Δr
i
c
e
−γ
a
(t
i
−
Δr
i
c
)
e
−iω
ab
(t
i
−
Δr
i
c
)
, (2.33)
and
ψ
φ
(r
i
, t
i
) =
ε
φ
Δr
i
Θ
t
i
−t
0
−
Δr
i
c
e
−γ
a
(t
i
−t
0
−
Δr
i
c
)
e
−iω
bc
(t
i
−t
0
−
Δr
i
c
)
, (2.34)
where i = 1, 2 designates the detector positions.
2.5 Conclusions
One motive for this chapter is to show that the time appearing in the classical
Maxwell equations is the same as the time parameter which appears in the TDSE.
Thus, the times appearing in classical mechanics and electrodynamics and quantum
mechanics are all the same.
Another motivation involves the definition of the photon wave function in terms
of the electric and magnetic operators as
2 Time Dependent Schr
¨
odinger Equation 23
Ψ
E
(r, t) =0|
ˆ
E(r)|Ψ (t), (2.35)
and
Ψ
H
(r, t) =0|
ˆ
H(r)|Ψ (t). (2.36)
Equations (2.6) and (2.11) are the analog of the matter wave probability
amplitudes
Ψ (r, t) =0|
ˆ
ψ(r)|Ψ (t) (2.37)
discussed at length in Sect. 2.1.
As explained in [3], the discussion of the proceeding paragraph serves to put the
nice question of Kramers [9] in perspective. Specifically, Kramers asks,
When in 1924 De Broglie suggested that material particles should show wave phenom-
ena ...such a comparison was of great heuristic importance. Now that wave mechanics has
become a consistent formalism one could ask whether it is possible to consider the Maxwell
equations to be a kind of Schr
¨
odinger equation of light particles ...?
Kramers answers his question in the negative, he says,
Thus it is natural to ask what are the φ’s for photons? Strictly speaking there are no such
wave functions! One may not speak of particles in a radiation field in the same sense as
in the elementary quantum mechanics of systems of particles as used in the last chapter.
The reason is that the wave equation ...solutions of Schr
¨
odinger’s time dependent wave
function corresponding to an energy E
λ
have a circular frequency ω
λ
=+E
λ
/, while the
monochromatic solutions of the wave equation have both ±ω
λ
.
In other words, Kramers is saying that “the real electric wave has both exp(−iν
k
t)
and exp(iν
k
t) parts while the matter wave has only exp(−iν
p
t) type terms.”
However, from the quantum optical perspective, we see that the photon wave
functions (2.35) and (2.36) and the matter wave function (2.37) are identical in spirit.
An earlier discussion of the importance of the analytical (positive frequency) signal
in this context was given by Sudarshan [10].
The present measurement theory, “a-photon-is-what-a-photodetector-detects”
point-of-view is discussed further in [3]. We have also included in Sect. 2.4 a
detailed photon–photon correlation analysis [8] for the convenience of the reader.
Acknowledgments I would like to thank R. Arnowitt, C. Summerfield, and S. Weinberg for useful
and stimulating discussions. This work was supported by the Robert A. Welch Foundation grant
number A-126 and the ONR award number N00014-07-1-1084.
References
1. M. Scully, J. Phys. Conf. Ser. 99, 012019 (2008); Wilhelm and Else Heraeus-Seminar (no. 395)
in Honor of Prof. M. Kleber (Blaubeuren, Germany, Sept 2007) 15
24 M.O. Scully
2. K. Chapin, M. Scully, M.S. Zubairy, in Frontiers of Quantum and Mesoscopic Thermodynam-
ics Proceedings (28 July–2 August 2008), Physica E, to be published 15
3. M. Scully, M.S. Zubiary, Quantum Optics (Cambridge Press, Cambridge, 1997) 16, 17, 23
4. S. Weinberg, The Quantum Theory of Fields I (Cambridge Press, Cambridge, 2005) 19
5. S. Schweber, An Introduction to Relativistic Quantum Field Theory (Harper and Row, New
York, 1962) 19
6. R. Good, T. Nelson, Classical Theory of Electric and Magnetic Fields (Academic Press, New
York, 1971) 19
7. R. Oppenheimer, Phys. Rev. 38, 725 (1931) 19
8. M. Scully, in Advances in Quantum Phenonema, E. Beltrametti, J.-M. L
´
evy-Leblond (eds.)
(Plenum Press, New York, 1995) 21, 23
9. H. Kramers, Quantum Mechanics (North Holland, Amsterdam, 1958) 23
10. E.C.G. Sudarshan, Phys. Rev. Lett. 10, 277 (1963) 23

Chapter 3
Post-Pauli’s Theorem Emerging Perspective
on Time in Quantum Mechanics
Eric A. Galapon
3.1 Introduction
In a Hilbert space setting, Pauli’s well-known theorem asserts that no self-adjoint
operator exists that is conjugate to a semibounded or discrete Hamiltonian [55].
Pauli’s argument goes as follows. Assume that there exists a self-adjoint operator
T conjugate to a given Hamiltonian H, that is,
[
T, H
]
= iI; such an operator
conjugate to the Hamiltonian is known as a time operator. Since T is self-adjoint,
the operator U
ε
= exp(−iεT) is unitary for all real number ε.Nowifϕ
E
is an
eigenvector of H with the eigenvalue E, then, according to Pauli, the conjugacy
relation
[
T, H
]
= iI implies that T is a generator of energy shifts so that HU
ε
ϕ
E
=
(E + ε)ϕ
E+ε
; this means that H has a continuous spectrum spanning the entire real
line because ε is an arbitrary real number. Hence, the ‘inevitable’ conclusion that if
the Hamiltonian is semibounded or discrete no self-adjoint time operator T will exist
to satisfy
[
T, H
]
= iI. A modern reading of Pauli’s theorem is that the conjugacy
relation [T, H] = iI implies that the pair T and H form a system of imprimitivities
over the entire real line, so that when H is semibounded or discrete T cannot be
self-adjoint [59].
It is Pauli’s theorem that has distilled the idea that self-adjointness and conjugacy
of a time operator for a semibounded or discrete Hamiltonian cannot be imposed
simultaneously [29, 43, 56, 59, 53, 60, 44]. Since quantum observables are pos-
tulated to be self-adjoint operators in the earlier days of quantum mechanics [63],
the non-existence of self-adjoint time operator has been interpreted to mean that
time is not a dynamical observable but a mere parameter marking the evolution of
a quantum system [58, 36, 54, 7, 2]. However, it is likewise widely recognized that
time acquires dynamical significance in questions involving the occurrence of an
event [59, 8, 52, 12] – when a nucleon decays [15] or when a particle arrives at a
given spatial point [51, 39] or when a particle emerges from a potential barrier [48].
E.A. Galapon (B)
Theoretical Physics Group, National Institute of Physics, University of the Philippines, Diliman,
Quezon City, Philippines, eric.galapon@up.edu.ph
Galapon, E.A.: Post-Pauli’s Theorem Emerging Perspective on Time in Quantum Mechanics. Lect.
Notes Phys. 789, 25–63 (2009)
DOI 10.1007/978-3-642-03174-8
3
c
Springer-Verlag Berlin Heidelberg 2009
26 E.A. Galapon
Moreover, there is the time–energy uncertainty principle, a reasonable interpretation
of which requires more than a parametric treatment of time [8, 1, 3, 9, 16, 17, 40–42].
This opposing view on time in quantum mechanics precipitated to what is now
known as the quantum time problem.
Pauli’s theorem has been so ingrained into the physicist’s psyche that it stifled
serious sustained research on the quantum dynamical aspect of time until quite
recently. The realization that quantum observables are not necessarily self-adjoint
but may be non-self-adjoint as first moments of positive operator-valued measures
(POVM) has brought a resurgence of interest on the quantum time problem. The
introduction of POVM observables has opened up the possibility of entertaining
non-self-adjoint, conjugate time operators as quantum observables, because such
operators may be first moments of certain POVMs [59, 2, 10]; the quantized free
time of arrival operator is an example of such a non-self-adjoint operator conju-
gate to the free Hamiltonian [14]. Since Pauli’s theorem has been understood to
mean that T and H are each other’s generator of translations in their respective
spectral measures, it has been the belief that a time operator must inevitably be
non-self-adjoint for semibounded Hamiltonians and must cardinally be covariant
and a POVM observable [29, 59, 60, 2, 8, 9, 14, 4]. Now covariance requires that a
time operator must at least have a completely continuous spectrum. This altogether
denies the possibility of constructing self-adjoint time operators that are bounded
and compact for semibounded Hamiltonians.
However, while a sustained development in the dynamical aspect of time under
the motivation of POVM observables is in progress, an unexpected development
has emerged: a counter example to Pauli’s theorem in the Hilbert space formulation
of quantum mechanics is constructed, exposing the subtle assumptions that go into
Pauli’s arguments that cannot be sustained. In [19] we have shown the consistency
of a bounded and self-adjoint operator conjugate to a discrete and semibounded
Hamiltonian, contrary to Pauli’s claim. There we have explicitly shown that the
quantized classical free time of arrival for a spatially confined particle is self-adjoint,
compact, and conjugate to the Hamiltonian in a non-dense subspace of the Hilbert
space. This in effect has demonstrated that the non-self-adjointness of the same
formal quantized operator for a particle in the real line has nothing to do with the
semiboundedness of the free Hamiltonian, again, contrary to expectations due to
Pauli’s theorem. The existence of such self-adjoint time operators has opened up
a new window through which the quantum time problem can be viewed from a
different perspective.
In this chapter, we synthesize the progress that we have made since the appear-
ance of [19], in particular, to our solution to the quantum time of arrival problem
in the interacting case [50, 4, 49, 21]. Our solution consists of generalizing the
time of arrival for a spatially confined particle in [19] under more general boundary
conditions and in the presence of an interaction potential. This generalization led to
the introduction of the confined quantum time of arrival (CTOA) operators, which
are both conjugate and self-adjoint [24, 25, 22]. The dynamical behaviors of the
eigenfunctions of the CTOA operators lead to a coherent theory of quantum arrival
in one dimension that can yield both time of arrival distributions and at the same

3 Post-Pauli’s Theorem 27
give a mechanism for the appearance of particle at the moment of its arrival [26, 23].
The resulting theory of quantum arrival invites us to reconsider our beliefs on time
operators and on the role of time in quantum measurement theory.
3.2 Quantum Canonical Pairs
3.2.1 Canonical Pairs in Hilbert Spaces
We cannot start to appreciate the significance of the counter example to Pauli’s the-
orem without a clear understanding of the properties of a canonical pair in a Hilbert
space. To the physicist, a canonical pair is a pair of operators (Q, P) satisfying the
canonical commutation relation, [Q, P] = iI, (CCR), but a quantum canonical pair
is much more elaborate than that. Failure to recognize its ramifications can lead to
unwarranted claims and conclusions regarding the properties of such a pair [11].
Let H be the system Hilbert space, which we assume to be infinite dimensional. If
we seek a pair of operators in H, Q and P, with respective domains D
Q
and D
P
,
satisfying the CCR, then two facts must be recognized:
1. No pair (Q, P) exists to satisfy the CCR in the entire Hilbert space H.
That is, there are no Q and P such that [Q, P]ϕ = iϕ for all ϕ in H,or
[Q, P] = iI
H
, where I
H
is the identity in H. A pair (Q, P) can at most satisfy
the CCR in a proper subspace, D
c
,ofH; that is, the relation [Q, P]ϕ = iϕ
holds only for all those ϕ in D
c
, where D
c
is always smaller than H. Thus a
canonical pair in a Hilbert space is a triple C(Q, P; D
c
) – a pair of Hilbert space
operators, Q and P, together with a non-trivial, proper subspace D
c
of H, which
we refer to as the canonical domain. The canonical domain may or may not be
dense;
1
it may not even be invariant under either Q or P. These subtle properties
of the canonical domain generally forbid us from acting arbitrarily with Q and
P on D
c
. Failure to pay attention to these small details can lead to erroneous
generalizations; for example, the conclusion that the spectra of Q and P are the
entire real line because they satisfy the CCR (see, for example, [11]) requires, at
least, the canonical domain be dense and invariant under Q and P. When even just
one of these conditions is not satisfied, the conclusion no longer holds. In general
the commutator domain, D
com
= D
QP
∩D
PQ
, the domain in which (QP−PQ)is
defined in the Hilbert space, does not coincide with the canonical domain. That
is, the canonical commutation relation [Q, P]ϕ = iϕ does not hold in general
for arbitrary elements of D
com
but only for certain elements of a subset D
c
of
D
com
.
2. There are canonical pairs in the same Hilbert space that do not share the same
properties.
1
A subspace D of H is dense if the only vector orthogonal to all elements of D is the zero vector.

28 E.A. Galapon
This means that, for a given Hilbert space H, we can find different pairs of oper-
ators (Q
j
, P
j
) acting in H , together with corresponding subspaces D
j
, such that we
have the canonical pairs C(Q
j
, P
j
; D
j
). The pairs (Q
j
, P
j
) and (Q
j
, P
j
) may be
different in the sense that there is no unitary operator U such that Q
j
= UQ
j
U
−1
and P
j
= UP
j
U
−1
. For such cases, the pairs C(Q
j
, P
j
; D
j
) will have different
spectral properties, e.g., one pair may be self-adjoint, another non-self-adjoint. Also
it is possible that for a given operator Q there may be several distinct P
k
’s with
corresponding subspaces D
k
– that is, P
k
= P
k
and D
k
= D
k
for k = k
– such
that for every k we have the canonical pair D(Q, P
k
; D
k
). Of course for a given P
and D
c
, such that we have the canonical pair C(Q, P; D
c
), we can also find another
operator P
= P + F with [Q, F]ϕ = 0 for all ϕ in D
c
such that we have another
canonical pair C
(Q, P
; D
c
). But we mean more than that: For P
k
= P
k
there may
not be an F such that P
k
= P
k
+F. We will illustrate later how these different cases
may arise in certain physical systems.
3.2.2 Classification of Hilbert Space Solutions to the CCR
For a given Hilbert space H, we refer to a canonical pair C(Q, P; D
c
), with Q and
P both operators in H, as a solution to the CCR.
2
Solutions split into two major
categories, according to whether the canonical domain D
c
is dense or not. We shall
say that a canonical pair is of dense-category if the corresponding canonical domain
is dense; otherwise, it is of closed category. Solutions under these categories further
split into distinct classes of unitary equivalent pairs, and each class will have its
own set of properties. Under such categorization of solutions, the CCR in a given
Hilbert space H assumes the form [Q, P] ⊂ iP
¯
D
c
, where P
¯
D
c
is the projection
operator onto the closure
¯
D
c
of the canonical domain D
c
. If the pair C(Q, P; D
c
)
is of dense category, then the closure of D
c
is just the entire H, so that P
¯
D
c
is the
identity I
H
of H. In fact, we are considering a more general solution set to the CCR
than has been considered so far. The traditional reading of the CCR in H is the form
[Q, P] ⊂ iI
H
, which is just the dense category.
It can be shown that the canonical and commutator domains coincide for dense
category canonical pairs, that is, D
c
= D
com
; on the other hand, the canonical
domain is smaller than and contained in the commutator domain for closed category
canonical pairs, that is, D
c
⊂ D
com
[27]. Since only the dense category solutions
have been the subject of investigations so far, we have gotten used to dealing with
canonical pairs in the entire commutator domain and may feel suspicious with the
2
We avoided to use the more mathematically accurate term representation infavoroftheterm
solution. The reason is that representation carries an extra connotation in physics in which it usu-
ally implies equivalence. For example, we have position and momentum representations, and we
know that these two representations are equivalent so that it does not matter which one we use in
describing our system. In fact, the use of phrases such as representations of the Heisenberg pair
in physics literature has added to the confusion on the exact nature of quantum canonical pairs, in
particular, giving the impression that different canonical pairs have similar properties.
3 Post-Pauli’s Theorem 29
closed category solutions. However, the confined time of arrival operators, together
with their Hamiltonians, form such a class of canonical pairs, and they, as we will
see later, have an unambiguous physical origin.
3.2.3 Is There a Preferred Solution to the CCR?
We discussed above that for a given Hilbert space H there are numerous solutions
to the canonical commutation relation that do not necessarily share the same prop-
erties. So is there a preferred solution to the CCR? Should we accept only solutions
of dense or closed category of a specific class? Let us see how different solutions
may arise in a given Hilbert space and see how each solution may represent different
systems.
Let us consider the well-known position and momentum operators in three differ-
ent configuration spaces: The entire real line, Ω
1
= (−∞,∞); the bounded segment
of the real line, Ω
2
= (0, 1); and the half line Ω
3
= (0, ∞). Quantum mechanics
in each of these happens in the Hilbert spaces H
1
= L
2
(Ω
1
), H
2
= L
2
(Ω
2
), and
H
3
= L
2
(Ω
3
), respectively. The position operators, Q
j
,inH
j
, for all j = 1, 2, 3,
arise from the fundamental axiom of quantum mechanics that the propositions for
the location of an elementary particle in different volume elements of Ω
j
are com-
patible (see Jauch [45] for a detailed discussion for Ω
1
, which can be extended to
Ω
2
and Ω
3
). They are self-adjoint and are given by the operators (Q
j
ϕ)(q) = qϕ(q)
for all ϕ in the domain D
Q
j
=
ϕ ∈ H
j
: Q
j
ϕ ∈ H
j
. Note that Q
1
and Q
3
are
both unbounded, while Q
2
is bounded.
Now each of the configuration spaces, Ω
1
, Ω
2
, and Ω
3
, has an identifying prop-
erty. Ω
1
is fundamentally homogeneous – points there are physically indistinguish-
able. On the other hand, Ω
2
and Ω
3
are not homogeneous, the boundaries being the
distinguishing factor. However, their inhomogeneities are not the same, their number
of boundaries being different. These properties can be expressed mathematically in
terms of the respective representation of translation in each of these configuration
spaces. Translation in Ω
1
is isomorphic to the additive group of real numbers; in
Ω
2
, to the group of rotations of the circle; in Ω
3
, to the semigroup of additive pos-
itive numbers. Thus in H
1
and H
2
there are one-parameter unitary operators U
1
(s),
U
2
(s) representing translations in H
1
and H
2
, respectively. And in H
3
there is a
completely one-parameter semigroup U
3
(s) representing translations. If we define
the momentum operator as the generator of translation in the configuration space,
then the momentum operator in H
j
is the operator P
j
defined on all vectors ϕ for
which the limit lim
s→0
(is)
−1
(U
j
(s) −I
H
)ϕ = P
j
ϕ exists. Explicitly, it is given by
(P
j
ϕ)(q) =−iϕ
(q).
In each H
j
, there exists a dense common subspace D
j
of Q
j
and P
j
, which is
invariant under Q
j
and P
j
, for which we have the canonical pair C
j
(Q
j
, P
j
; D
j
).
The C
j
’s are of the same dense category, but they belong to different classes: Q
1
and
P
1
are both self-adjoint, having absolutely continuous spectra spanning the entire
real line Re and forming a system of imprimitivities in Re, and their restrictions
30 E.A. Galapon
in D
1
are essentially self-adjoint. Q
2
is self-adjoint with an absolutely continuous
spectra in (a, b), and its restriction in D
2
is essentially self-adjoint; P
2
is self-adjoint
with a pure point spectrum, but its restriction in D
2
is not essentially self-adjoint.
Q
3
is self-adjoint with an absolutely continuous spectra in (0, ∞), and its restriction
in D
3
is essentially self-adjoint; P
3
is maximally symmetric and non-self-adjoint,
thus without any self-adjoint extension. These varied properties of the position and
momentum canonical pairs are obviously the consequences of the underlying prop-
erties of their respective configuration spaces.
So is there a preferred solution to the CCR? Recall that there is only one separable
Hilbert space; that is, all separable Hilbert spaces are isomorphically equivalent to
each other, so that there are unitary operations transforming one Hilbert space to
another. The three Hilbert spaces, H
1
, H
2
, and H
3
, are separable, and hence can be
transformed to a common Hilbert space H
C
, together with all the operators in them,
including their respective position and momentum operators. The canonical pairs,
{C
1
, C
2
, C
3
}, are then solutions of the CCR in the same Hilbert space H
C
.Andwe
have seen that they are of dense category solutions, but of different classes – and,
most important, they represent different physical systems. If we look at the diverse
properties of the above C
j
’s, we can see that these properties are reflections of the
fundamental properties of the underlying configuration spaces of their respective
physical systems.
It is then misguided to prefer one solution of the CCR over the rest or to require
a priori a particular category of a specific class of a solution without a proper con-
sideration of the physical context against which the solution is sought. For example,
if we insist that only canonical pairs forming a system of imprimitivities over the
real line are acceptable, then, within the context of position–momentum pairs, we
are imposing homogeneity in all configuration spaces. But why impose the homo-
geneity of, say, Ω
1
in intrinsically inhomogeneous configuration spaces like Ω
2
and
Ω
3
?
From the position–momentum example, it can be concluded that the set of prop-
erties of a specific solution to the CCR is consequent to a set of underlying fun-
damental properties of the system under consideration, or to the basic definitions
of the operators involved, or to some fundamental axioms of the theory, or to some
postulated properties of the physical universe. That is, a specific solution to the CCR
is canonical in some sense, i.e., of a particular category and of a particular class. It is
conceivable to impose that a given pair be canonical as a priori requirement based,
say, from its classical counterpart, but not without a deeper insight into the underly-
ing properties of the system. In other words, we do not impose in what sense a pair is
canonical if we do not know much, we derive in what sense instead. Furthermore, if
a given pair is known to be canonical in some sense, then we can learn more about
the system or the pair by studying the structure of the sense the pair is canonical
[19].
We can appreciate this statement further by noting that finding solutions to the
CCR in a Hilbert space is akin to solving a differential equation in which there is
no preferred solution until appropriate boundary or initial condition is imposed.
Also as in differential equations where the imposed conditions may not admit