Неумывакин Ю.К., Смирнов А.С. Практикум по геодезии
Подождите немного. Документ загружается.

№
пунк-
тов
Углы
Горизон-
тальные
проложе-
ния, м
Приращения координат,
м
Координаты,
м
№
пунк-
тов
измери-
тельные
горизон-
тальные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния, м
вычисленные
уравненные
X
±
Y
№
пунк-
тов
измери-
тельные
горизон-
тальные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния, м
±
ДХ
±
Д Y
± ДХ'
+
Д У
X
±
Y
1
2
3
4
5
6
±
7
8
9
10 11
А
в
(левые)
55°21
»0'
155°21,0'
80°34,8'
200,26
+
X
—7
112,19
од
+
1
+6
165,88
+
112,12
+
165,94
+
3686,91
+
5762,03
А
в
(левые)
55°21
»0'
155°21,0'
55 55,8
200,26
+
X
—7
112,19
од
+
1
+6
165,88
+
112,12
+
165,94
+
3686,91
+
5762,03
2
223 40,0
223 40,0
55 55,8
200,26
+
X
—7
112,19
од
+
1
+6
165,88
+
112,12
+
165,94
+
3799,03
+
5927,97
2
223 40,0
223 40,0
99 35,8
322,14
—
—12
53,69
I
т
+ 10
317,63
—
53,81
+
317,73
+
3799,03
+
5927,97
3
2А,
п
р
2Х
Т
/Г
379 01,0
379 01,0
+0,0
=±1,4
379 01,0
99 35,8
322,14
—
—12
53,69
I
т
+ 10
317,63
—
53,81
+
317,73
+
3745,22
+
6245,70
3
2А,
п
р
2Х
Т
/Г
379 01,0
379 01,0
+0,0
=±1,4
379 01,0
522,36
+
+
58,50
58,31
+
+
483,51
483,67
+
58,31
+
483,67
+
3745,22
+
6245,70
3
2А,
п
р
2Х
Т
/Г
379 01,0
379 01,0
+0,0
=±1,4
379 01,0
+
+
58,50
58,31
+
+
483,51
483,67
+
3
2А,
п
р
2Х
Т
/Г
379 01,0
379 01,0
+0,0
=±1,4
379 01,0
/х=+0,19 /у=—0,16
/абс=0,25
0,25 1
'
отн
~~
522 "1100
^Продолжение табл.
52
5
3
№
пунк-
тов
Углы
Горизон-
тальные
проложе-
ния, м
Приращения координат,
м
Координаты,
м
5
3
№
пунк-
тов
измерен-
ные
гори-
зонталь-
ные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния, м
вычисленные
уравненные
±
X
±
Y
5
3
№
пунк-
тов
измерен-
ные
гори-
зонталь-
ные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния, м
±
АХ
±
Д Y
± АХ'
±
Д Y'
±
X
±
Y
1
2
3 4
5
6
7
8
9
10
11
Е
F
(правые)
—2
153°15,5'
153°15,3'
245°03,2'
271 47,9
335,58
+
Хол
+8
10,53
1 2
—4
335,41
+
10,61
335,45
+
3261,04
+
6767,84
7
—2
113 19,0
ИЗ 18,8
245°03,2'
271 47,9
335,58
+
Хол
+8
10,53
1 2
—4
335,41
+
10,61
335,45
+
3271,65
+
6432,39
7
—2
113 19,0
ИЗ 18,8
338 29,1
508,91
+
+12
473,45
—
—5
186,64
+
473,57
—
186,69
+
3271,65
+
6432,39
3
—2
238 53,5
238 53,3
338 29,1
508,91
+
+12
473,45
—
—5
186,64
+
473,57
—
186,69
+
3745,22
+
6245,70
3
—2
238 53,5
238 53,3
279 35,8
844,49
+
483,98
•—
522,05
+
484,18
—
522,14
+
3745,22
+
6245,70
2
2р
п
р
Л
/Г
»
>
505 28,0
505 27,4
+0,6
±1,7'
505 27,4
279 35,8
844,49
+
483,98
•—
522,05
+
484,18
—
522,14
2
2р
п
р
Л
/Г
»
>
505 28,0
505 27,4
+0,6
±1,7'
505 27,4
+
484,18
•—
522,14
2
2р
п
р
Л
/Г
»
>
505 28,0
505 27,4
+0,6
±1,7'
505 27,4
fx=—0,20
/
у
=+ 0,09
/абс=0,22
0,22 1
fo
™ ~~ 844 ""
3800
Продолжение табл.
52
№
пунк-
тов
Углы
Горизон-
тальные
проложе-
ния
Приращения координат,
м
Координаты,
м
№
пунк-
тов
измерен-
ные
гори-
зонталь-
ные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния
вычисленные
уравненные
±
X
+
У
№
пунк-
тов
измерен-
ные
гори-
зонталь-
ные
исправ-
ленные
дирекци-
онные
Горизон-
тальные
проложе-
ния
±
ДХ
±
A Y
±
ДХ'
±
Д V
±
X
+
У
1
2 3
4
5
6
7
8
9
10
и
с
D
(правые)
+2
187°25,5'
187°25,7
/
188°58,4'
181 32,7
439,44
Х(
+5
439,36
) Д
3
—8
11,84
439,31
11,92
+
4739,45
+
6450,46
5
+2
187 33,5
187 33,7
188°58,4'
181 32,7
439,44
Х(
+5
439,36
) Д
3
—8
11,84
439,31
11,92
+
+
4300,14
+
6438,54
5
+2
187 33,5
187 33,7
173 59,0
292,96
—
+3
291,35
+
-5
30,70
—
291,32
+
30,65
+
+
4300,14
+
6438,54
4
+ 1
133 42,0
133 42,1
173 59,0
292,96
—
+3
291,35
+
-5
30,70
—
291,32
+
30,65
+
+
4008,82
+
6469,19
4
+ 1
133 42,0
133 42,1
220 16,9
345,58
—
+4
263,64
—
—7
223,42
—
263,60
—
223,49
+
+
4008,82
+
6469,19
3
+
1
120 41,0
120 41,1
220 16,9
345,58
—
+4
263,64
—
—7
223,42
—
263,60
—
223,49
+
3745,22
+
6245,70
3
+
1
120 41,0
120 41,1
279 35,8
1077,98
—
994,35
—
204,56
—
994,23
—
204,76
+
3745,22
+
6245,70
2
2Р
п
р
2р
т
/Р
/Г
629 22,0
629 2,26
—0,6
±2,0'
629 22,6
279 35,8
1077,98
—
994,35
—
204,56
—
994,23
—
204,76
2
2Р
п
р
2р
т
/Р
/Г
629 22,0
629 2,26
—0,6
±2,0'
629 22,6
279 35,8
—
994,23
—
204,76
2
2Р
п
р
2р
т
/Р
/Г
629 22,0
629 2,26
—0,6
±2,0'
629 22,6
279 35,8
/х=—0,12
/У= + 0,20
/абс=0,23
0,23 1
^
отн =
1078
=
4600
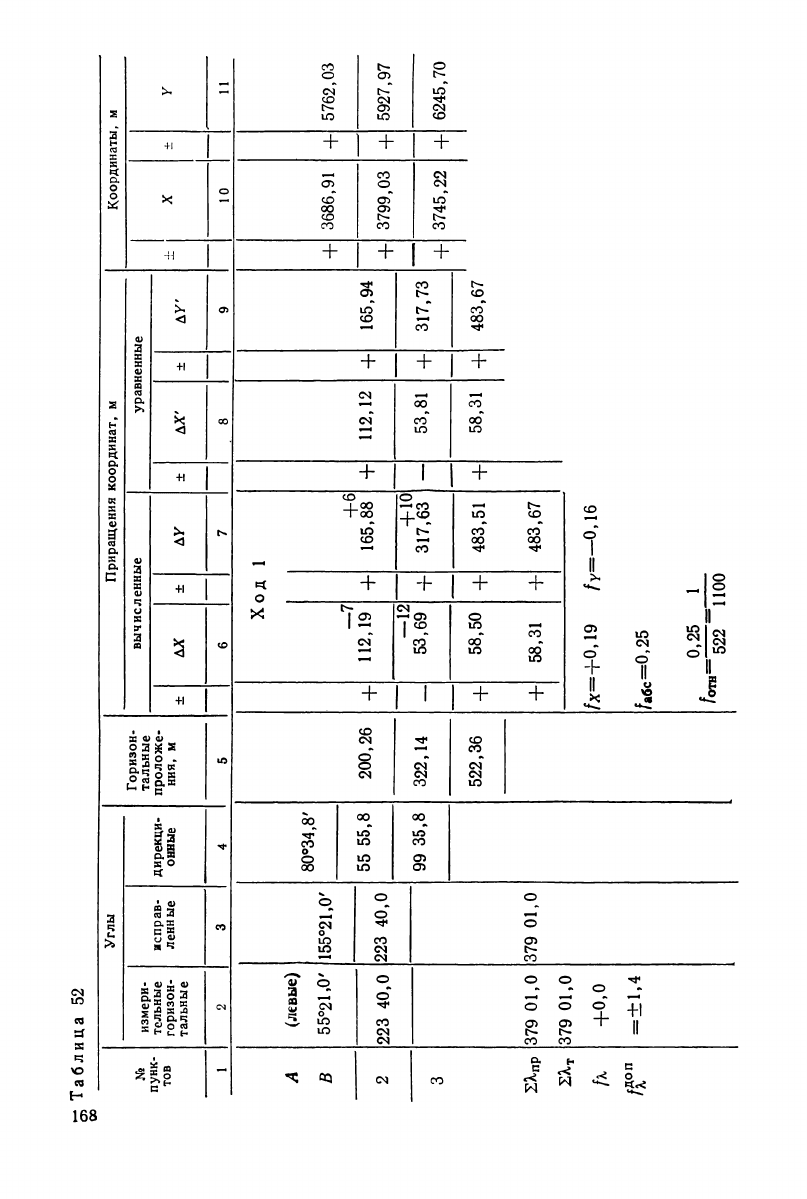
Уравнивание системы производят раздельно, т. е. вначале урав-
нивают горизонтальные углы, а затем — приращения координат.
Вычисления координат пунктов теодолитных ходов производят в
ведомости координат (табл. 52), куда вписывают измеренные (р —
правые и К — левые) углы (графа 2), горизонтальные проложения
(графа 5), координаты (X и Y) исходных геодезических пунктов
(графы 10 и 11).
Уравнивание горизонтальных углов
Формулы для решения задачи:
з
2
a
iPt
ок а\р\ + а
2
р2 +
&зРз
t= i
«2-3 =
Pi
+
P2
+
Рз
2jPi
t= i
Рабочая формула имеет вид
з
2
е
а
•
Pi
i=\
OK о
где а 2-з — окончательное значение дирекционного угла узловой
линии 2—3; ао — приближенное значение дирекционного угла этой
же узловой линии;
8
а. = а* — а
0
(остатки); 2, 3 (номер хода);
щ — дирекционный угол узловой линии 2—3, полученный по £-му
ходу; pi = Klrii (вес дирекционного угла); щ — число углов в i-м
ходе.
Вычисление аг-з возможно при условии допустимости невязок
по ходам
h
1+2
= «2 - «1.
2
= ±
1 •'
У^Гйй
fp
2+
3 = «3 — а
1(
f$°
n
+3
= ± Г У~п
2
+ п
3
.
Дирекционный угол узловой линии 2—3, подсчитанный по каж-
дому из трех ходов, составит:
по первому ходу
о
х
= алв + (2М
1ХО
да -
180
°' "1 = 80°34,8' + 379°01,0' -
— 180° • 2 = 99°35,8';
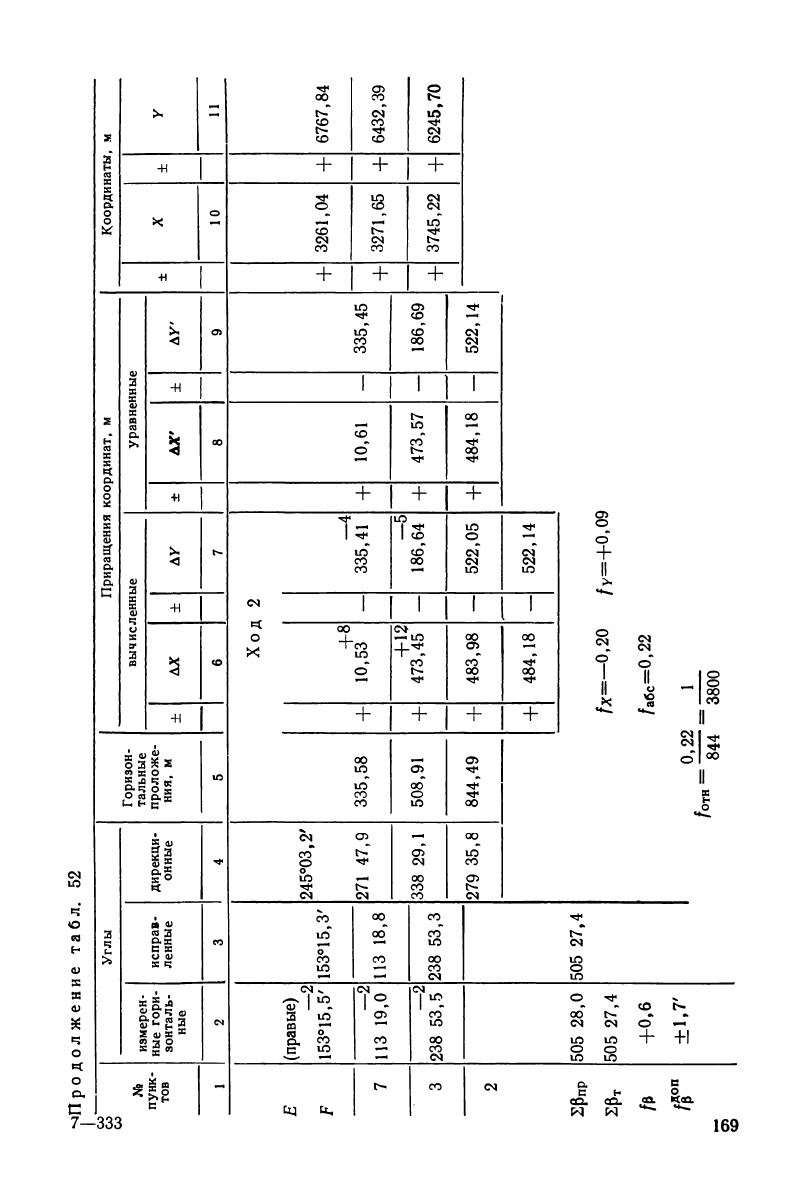
по второму ходу
а
2
= a
EF
— (2р),
хода
+ 180°. п
2
± 180° = 245°03,2' — 505°28,0' +
+ 180° • 3 — 180° = 99°35,2';
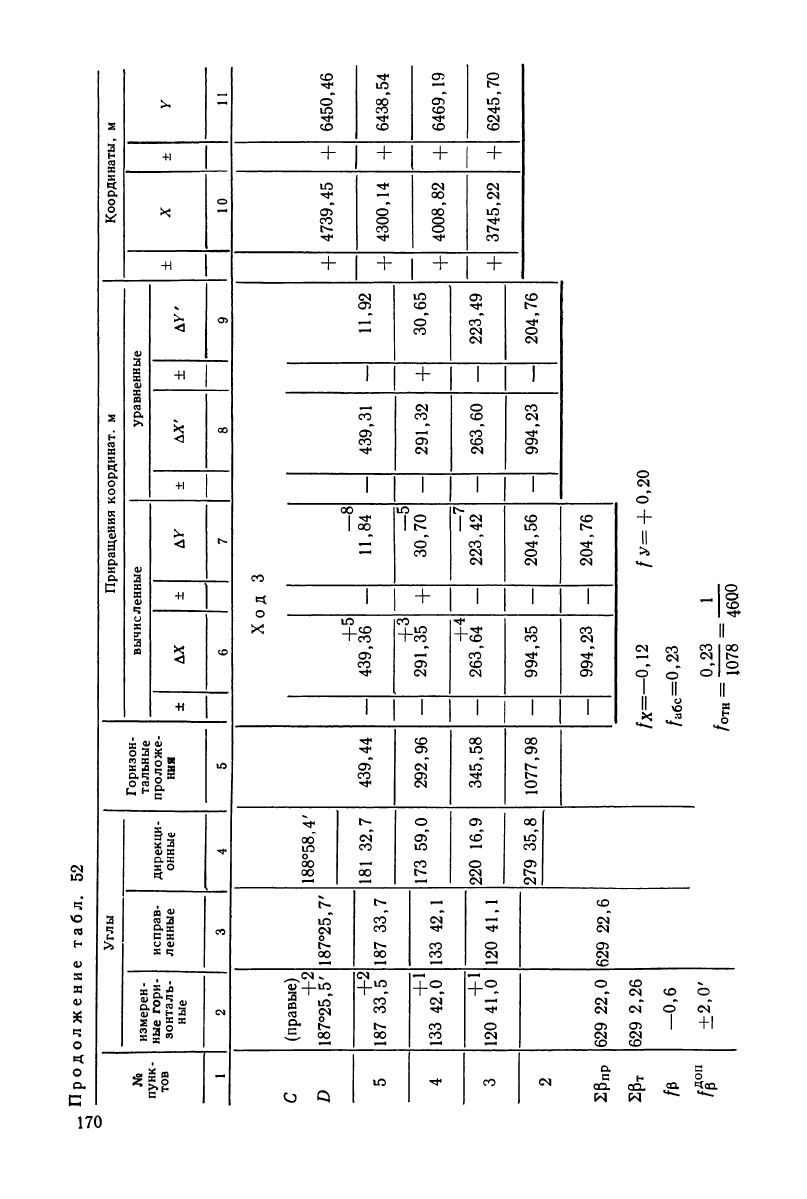
по третьему ходу
«3 = «со ~ (2р)зхода + 180° • п
3
± 180° = 188°58,4' - 629°22,0' +
+ 180° • 4 — 180° = 99°3б,4'.
7* 171

Номер j
хода
t
а
;
ч
n
i
К
Pi
= —;
n
i
/С=6
'Pi
Проверка допусти-
мости невязок
1
99°35,8' +0,6'
3 3,0
+ 1,8'
+0,0'
+0'
h =
0
'
6
'
1 + 2
2
35,2
0
3
2,0
0
+0,6
+1,2
/§-
2
= ±2,4'
3
36,4
+ 1,2
4
1,5 + 1,8 —0,6
-0,9
/Э
2+3
= +
1
-2'
а
0
=
99°35,2'
6,5
3,6
+0,3
/С
П
з = ±
2
'
6
'
= 99°35,2' + = 99°35,8'; со = +0,05'
6,5
Контроль: = + 0,3'.
Найденные значения выписывают в табл. 53. Там же приводят
значения невязок по ходам, рассчитанных по формулам:
fk
i
= «* — (для левых углов);
/р. = —
oli
(для правых углов).
Контролем вычисления служит равенство
2 pih
t
= о
£=1
или
2 = о.
1=1
Так как окончательное значение аг-з округлено (более точное
значение аг-з = 99°35,754', а ошибка округления составит
G>
= 99°35,8
/
—99
э
35,754'= +0,050, то
3 3
Pi
•
t=l 1=1
Уравнивание приращений координат
Формулы для решения задачи:
3 3
2
X
iPi 2
e
X.Pi
Х
ок
i=l
V I *
3 = з ~
А
оН ,
2 Pi 2 Pi
t=i 1=1
Y? =
2
Y
iPi
i= 1
3
1 = 1
= П +
2j ty pi
3
где ХТи Уз
к
— окончательные значения координат узловой точки 3;
и У о — приближенные значения координат;
е*. = X, — Х
0
и е
к
. = Ух — У
0
(остатки);
/= 1, 2, 3 (номер хода); Xi и У* — координаты узлового пункта 3,
полученные по каждому i-му ходу; pi = KILi (веса координат),
Li — длина i-ro хода.
Вычисление координат Х
3
и У
3
возможно при условии допусти-
мости невязок по ходам, т. е.
fx
{
+
2
=
fy
1+
2
=
^2 ^li
/L
1+2
=
4+2 ^
г
1+2'
/L
1+2
<
'1+2
2000
fХ
2
+3 — ^2» /У24-3 ~~ ^
У 2+3
^2+3 ~~ К 7*2+3 + ^2+3,
•2+
3
<
"2+3
2000
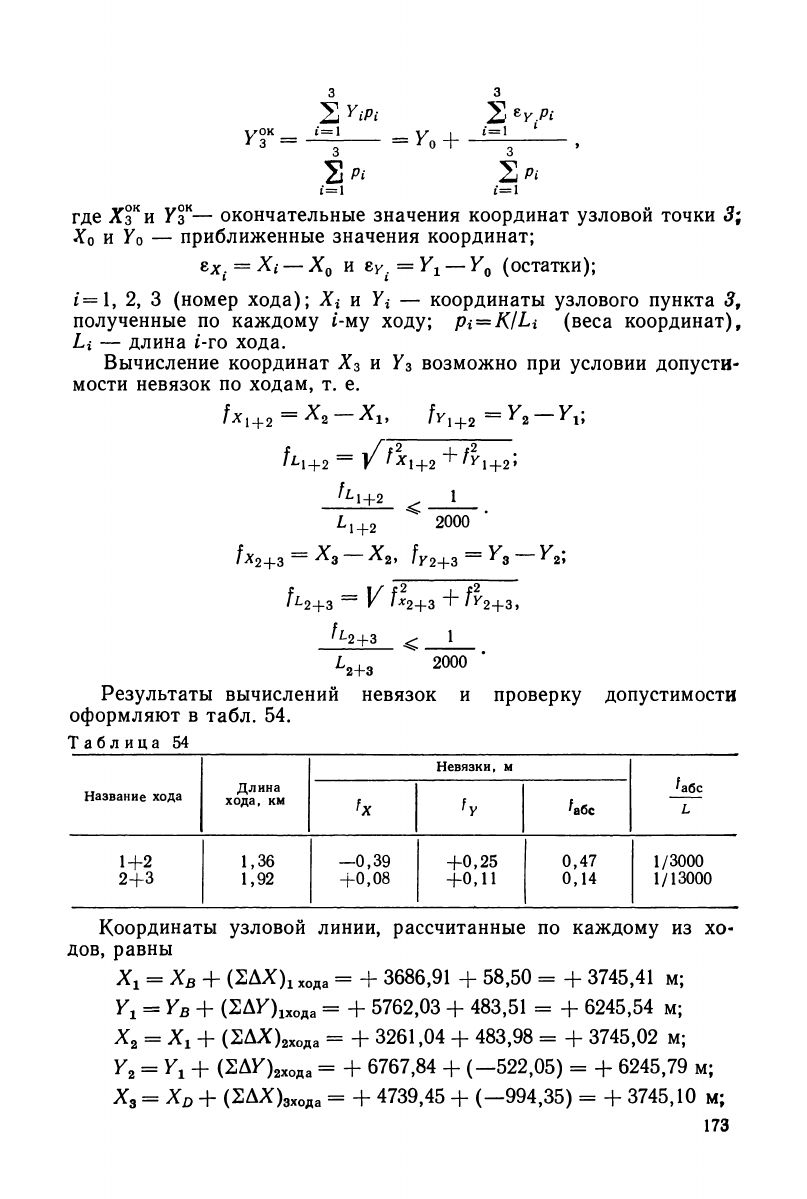
Результаты вычислений невязок и проверку допустимости
оформляют в табл. 54.
Таблица 54
Невязки, м
^абс
L
Название хода
Длина
хода, км
fx
^абс
^абс
L
1+2
2+3
1,36
1,92
—0,39
+0,08
+0,25
+0,11
0,47
0,14
1/3000
1/13000
Координаты узловой линии, рассчитанные по каждому из хо-
дов, равны
Х
г
= + (2ДХ)
1хода
= + 3686,91 + 58,50 = + 3745,41 м;
У
х
= У
в
+ (2ДУ)
1Х0Да
= + 5762,03 + 483,51 = + 6245,54 м;
= Х
х
+ (2ДХ)
2хода
= + 3261,04 + 483,98 = + 3745,02 м;
У
2
= У
г
+ (2ДУ)
2ХО
д
а
= + 6767,84 + (-522,05) = + 6245,79 м;
Х
3
= + (2ДХ)
зхода
= + 4739,45 + (-994,35) = + 3745,10 м;
173
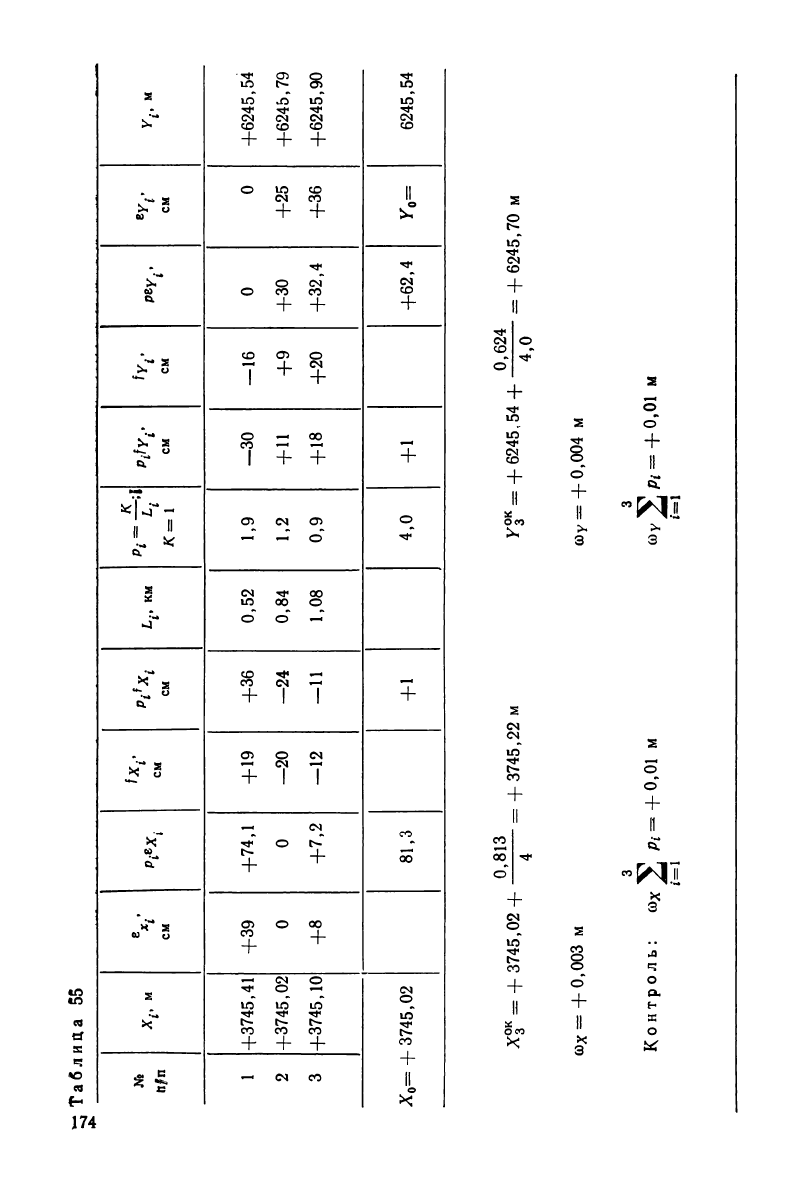
№
tifn
x
i•
м
е ,
x
i
см
fx,
см
Pi
f
X.
см
L., км
* г
p
i
=
7Г
К =
1
Pjy
c
см
см
ре
у
..
см
Y., м
1 +3745,41
+39
+74,1
+ 19
+36 0,52
1,9
-30
—16
0 0
+6245,54
2
+3745,02
0
0
—20
—24
0,84 1,2
+ 11
+9
+30
+25
+6245,79
3
+3745,10
+8
+7,2
—12 —И
1,08
0,9
+18
+20
+32,4
+36
+6245,90
Х
0
= + 3745,02
81,3
+ 1
4,0
+1
+62,4
6245,54
О 813
XT = + 3745,02 + — = + 3745,22 м
4
со
х
= +0,003 м
3
Контроль: Р1
,=Е
+0>01
м
К™ = + 6245,54 + = + 6245,70 м
со
у
= +0,004 м
3
wy2
/7t
'
==
+
0,01 м
= Yd + (2ДУ)зхода = + 6450,46 + (—204,56) - + 6245,90 м.
Их выписывают в табл. 55.
Там же приводят значения невязок по каждому из 3-х ходов,
рассчитанных по формулам
f
x
-Xt-X?
t
Контролем вычисления служат равенства
2 P'ftc = о.
t=i
3
= 0.
i=i
ок
и У°з округлены
(о)х: =
Так как окончательные значения Х
3
= +0,003 и соу=+0,004), то
и
2pifx
t
= co^Spi
%pify. = оtySpj.
§ 49. ОПРЕДЕЛЕНИЕ КООРДИНАТ ПУНКТА
ГЕОДЕЗИЧЕСКИМИ ЗАСЕЧКАМИ
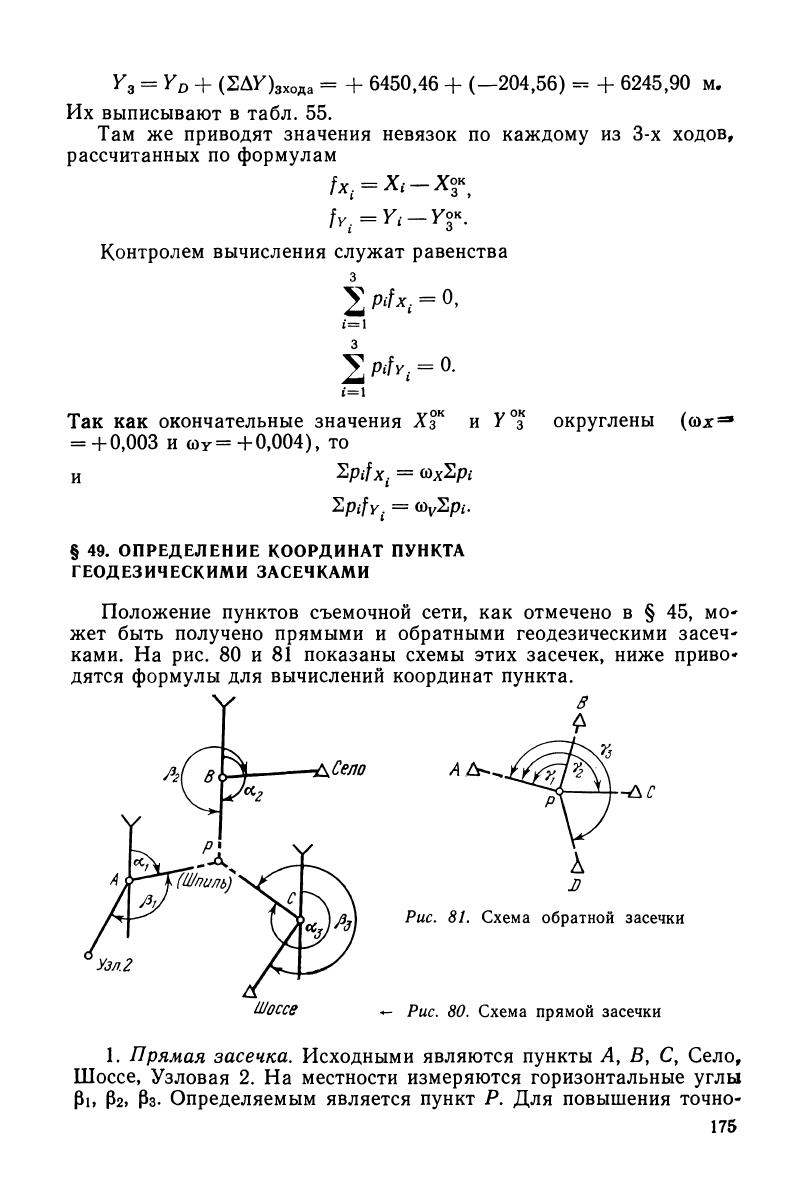
Положение пунктов съемочной сети, как отмечено в § 45, мо-
жет быть получено прямыми и обратными геодезическими засеч-
ками. На рис. 80 и 81 показаны схемы этих засечек, ниже приво-
дятся формулы для вычислений координат пункта.
V/
Село
Л Д^.
Шоссе
Рис. 81. Схема обратной засечки
Рис. 80. Схема прямой засечки
1. Прямая засечка. Исходными являются пункты Л, В, С, Село,
Шоссе, Узловая 2. На местности измеряются горизонтальные углы
Рь Рз. Определяемым является пункт Р. Для повышения точно-
сти определения координат пункта Р необходимо на местности
выбирать такую комбинацию исходных пунктов, чтобы угол при
засекаемой точке был близок к 90°, а расстояния от исходных до
определяемого пункта были примерно одинаковы. Не допускается
иметь этот угол менее 30° и более 150°. Для нахождения координат
пункта Р достаточно два исходных пункта Л и В, третий С служит
для контроля правильности его определения.
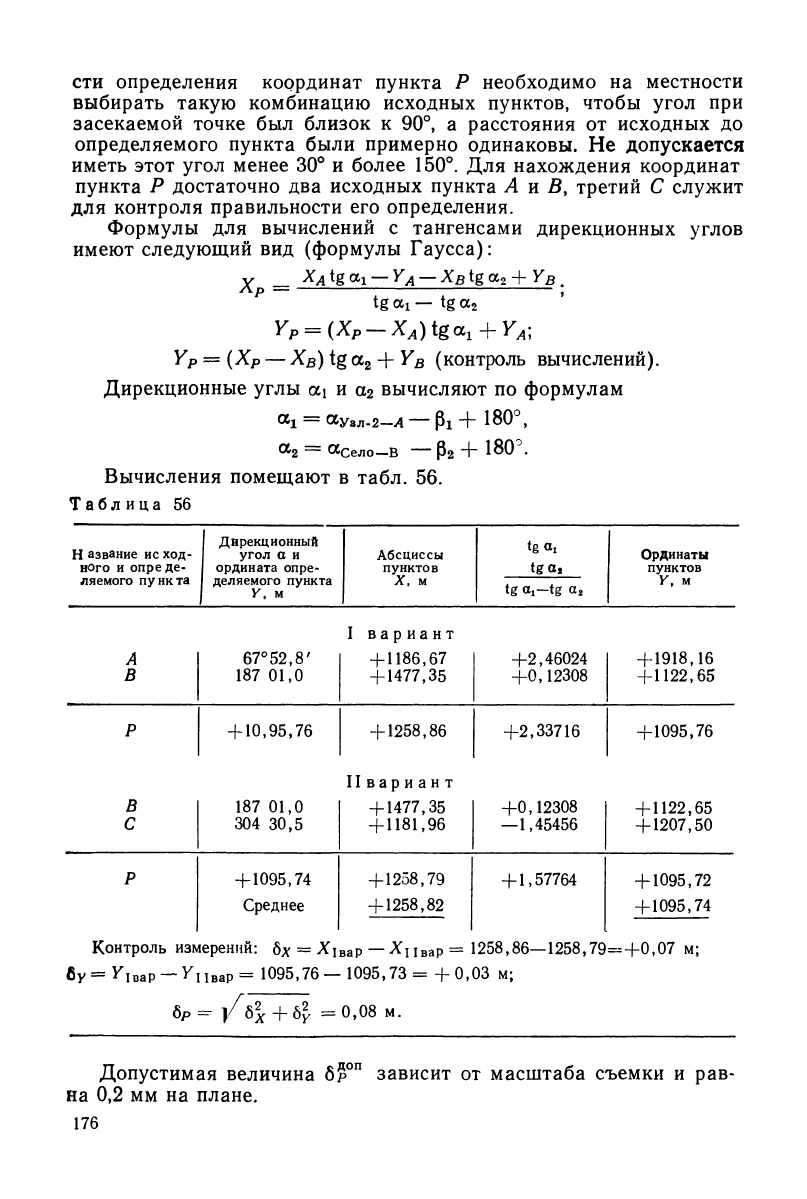
Формулы для вычислений с тангенсами дирекционных углов
имеют следующий вид (формулы Гаусса):
X tg — У л
—
Хв tg а
2
+ У в.
tg ах — tg a
2
Y
P
= (X
P
-X
A
)tga
1
+ Y
A
;
Y
P
= (X
P
— X
B
) tg a
2
+ Y
B
(контроль вычислений).
Дирекционные углы ai и а
2
вычисляют по формулам
а
1 = ОЬузл-2—л — Pi + 180°,
а
2 = «Село-в — Рг + 180°.
Вычисления помещают в табл. 56.
Таблица 56
Н азвание ис ход-
ного и опреде-
ляемого пункта
Дирекционный
угол а и
ордината опре-
деляемого пункта
Y, м
Абсциссы
пунктов
X, м
tg
a>t
tga,
tg cti—tg a
2
Ординаты
пунктов
К, м
I вариант
А
В
67°52,8'
187 01,0
+ 1186,67
+ 1477,35
+2,46024
+0,12308
+ 1918,16
+ 1122,65
Р
+ 10,95,76 + 1258,86
II вариант
+2,33716 + 1095,76
В
С
187 01,0
304 30,5
+ 1477,35
+ 1181,96
+0,12308
—1,45456
+ 1122,65
+ 1207,50
Р
+ 1095,74
+ 1258,79
+ 1,57764
+ 1095,72
Среднее
+ 1258,82 +1095,74
Контроль измерений: 6х = ^1вар — Х\ 1вар == 1258,86—1258,79= +0,07 м;
6у= Ущар —Уцвар= 1095,76 — 1095,73 = +0,03 м;
6
Р
=г )/+ 6^ =0,08 м.
Допустимая величина 6р
оп
зависит от масштаба съемки и рав-
на 0,2 мм на плане.
Если один из дирекционных углов а\ или а
2
близок к 90° (270°),
но ни один из них не близок к 0° (180°, 360°), то можно использо-
вать формулы с котангенсами этих углов:
v
у
л
ct
g
a
i ~
х
а — У в ctg а
2
+ Х
в
.
у
р= : : ,
ctg а
х
— ctg а
2
X
P
= X
A
+ (Y
P
-Y
A
)ctga
v
Контроль:
Х
Р
= Хв + (Y
P
— Y
B
) ctg а
2
.
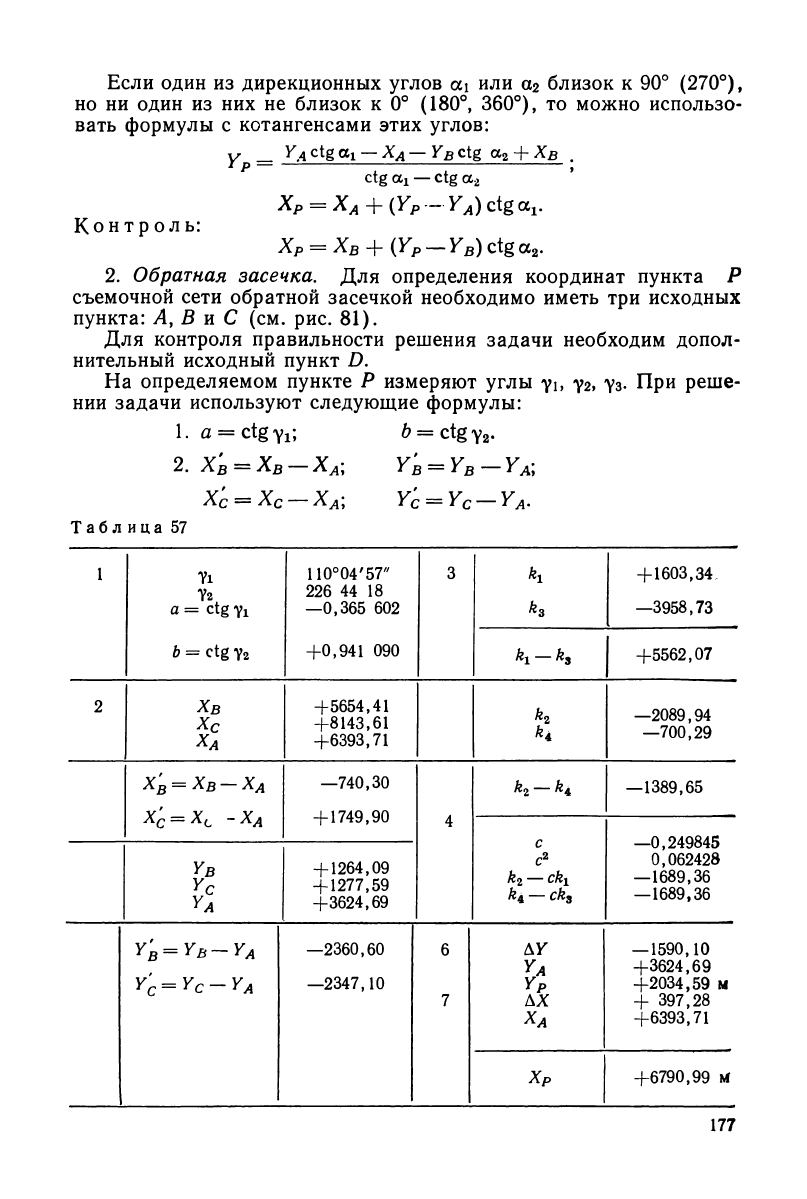
2. Обратная засечка. Для определения координат пункта Р
съемочной сети обратной засечкой необходимо иметь три исходных
пункта: Л, В и С (см. рис. 81).
Для контроля правильности решения задачи необходим допол-
нительный исходный пункт D.
На определяемом пункте Р измеряют углы у и у
2
, При реше-
нии задачи используют следующие формулы:
1. а = ctg yi; b = ctg
у
2
«
2. Хв — Хв — Х
А
\ Yв =
у
в
— Уд;
Хс = Х
с
— Х
А
; Y
c
— Y
c
— Y
А
.
Таблица 57
1
Yi
Y2
а = ctg Yi
110°04'57"
226 44 18
—0,365 602
3
К
+ 1603,34.
—3958,73
b
= ctg y
2
+0,941 090
k
x
—
k
s
+5562,07
2
*a
+5654,41
+8143,61
+6393,71
k 2
—2089,94
—700,29
X
B
= XB — X
A
=
-
XA
—740,30
+ 1749,90
k^ — kb
—1389,65
X
B
= XB — X
A
=
-
XA
—740,30
+ 1749,90
4
—0,249845
0,062428
—1689,36
—1689,36
Y
B
Y
C
y
A
+ 1264,09
+ 1277,59
+3624,69
С
С
2
— Ck i
k
A
— ck
9
—0,249845
0,062428
—1689,36
—1689,36
Y'
B
= Y
B
~Y
A
Y'
C
= Y
C
-Y
A
—2360,60
—2347,10
6
7
Д Y
Y
P
ДХ
X
A
— 1590,10
+3624,69
+2034,59 м
+ 397,28
+6393,71
Xp
+6790,99 M