Power electronic handbook
Подождите немного. Документ загружается.

32 Drives Types and Specifications 855
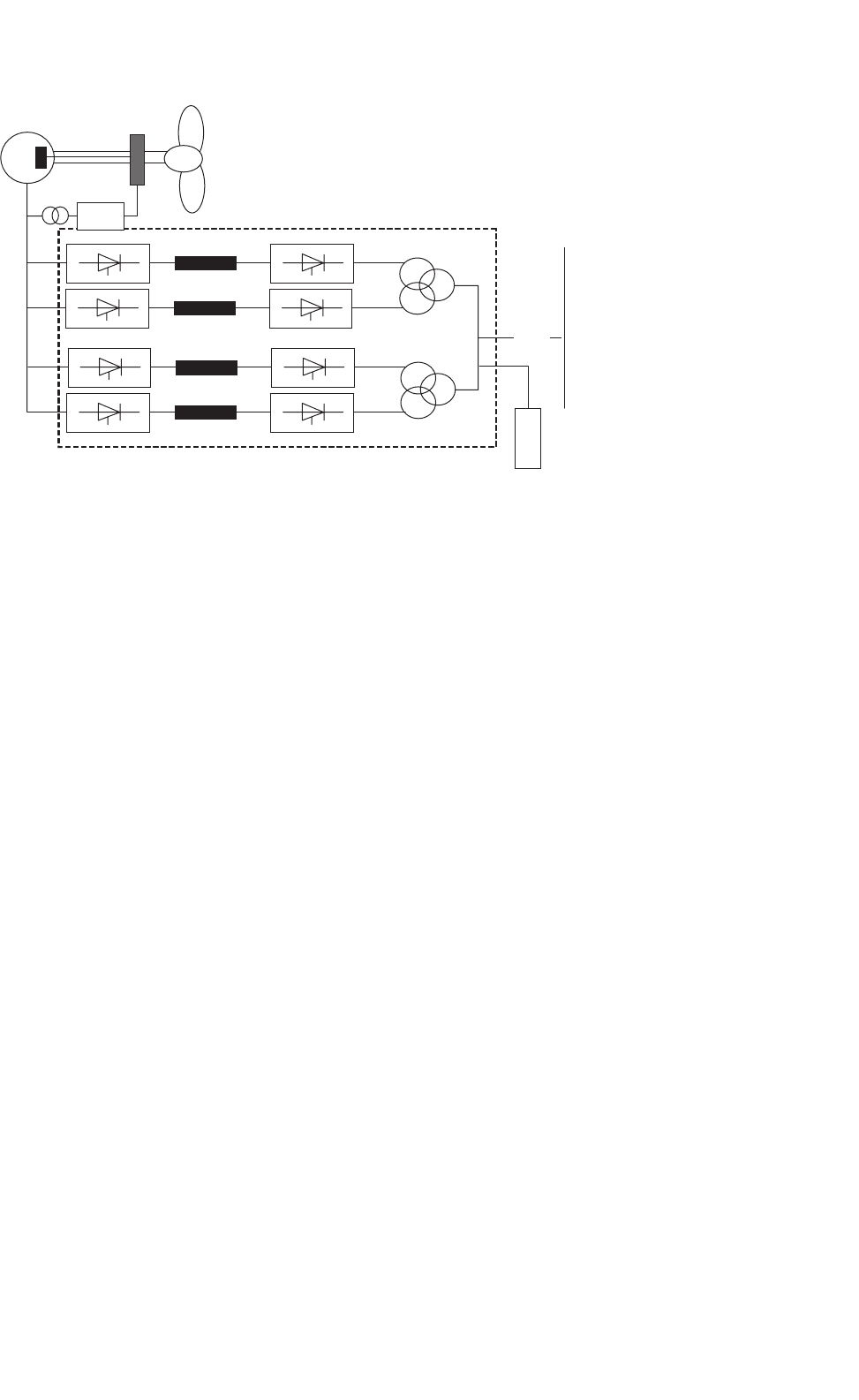
G
X
Harmonic filter
& Pony motor MG
24 pulse converter
AC in: 14-25.7Hz
DC link reactor
Static excitation
6.6kV, 60Hz
FIGURE 32.11 Schematic diagram of shaft generator.
the power rating of VSD correctly to meet performance
requirements and required life expectancy.
New areas of VSD applications are emerging as the power
electronics advances and become more reliable at afford-
able prices. Packaged drives up to several hundred kWs are
becoming a commodity product, and end-users do not need
to involve a third party during specification, installation,
and commissioning. Integrated motors are likely to increase
their popularity, possibly with new types of power converters,
e.g. matrix.
Further Reading
1. Dury, W., “Electrical Variable Speed Drives Mature Consumable
or Radical Infant,” Power Engineering Journal, April 1999, Vol.13,
No.2, IEE, London.
2. Guide to Harmonics with AC drives. ABB Technical Guide No.6.
3. Bose, B.K., “Power Electronics and Variable Frequency Drives:
Technology and Applications,” Piscataway, NJ: IEEE Press 1997.
4. Siemens, Complete Guide Series to Variable Speed Drives, “Knowl-
edge of Motor Duty – Key to Proper Planning of Drives,” 3.6.
5. Hobbs, P.J., “Electrical Variable Speed Drives Saves Energy,” Confer-
ence on Development in Variable Speed Drives for Fluid Machinery,
ImechE 1981, C101/81.
6. Richmond, A.W., Apprentice Engineers’ Handbook No. 2, “Servos
and Steppers,” Drives and Controls Publication, Kamtech Publishing
Ltd, Croydon, Surrey.
7. Shakweh, Y., “Aspects of Limited Motion Actuators and Sub-kW
Unipolar Drives,” PhD thesis, August 1989, London University.
8. Shakweh, Y. and Lewis, E., “Assessment of MV converter stack
topologies,” Power Electronics Specialist Conference 99.
9. Jouanne, et al., “Application Issues for PWM Adjustable Speed
AC Motor Drives,” IEEE Industry Application Magazine, Septem-
ber/October 1998, pp. 10–18.
10. Manz, L., “Motor Insulation System Quality for IGBT Drives,” IEEE
Industry Application Magazine, January/February 1997, pp. 51–55.
11. Chen, S. and Lipo, T.A., “Circulating type Motor Bearing Cur-
rent in Inverter Drives,” IEEE Industry Application Magazine,
January/February 1998, pp. 32–38.
12. Hargis, C., “Electro-Magnetic Compatibility – a Basic Guide for
Power Engineers,” Control Techniques Technical Publications,
Powys, UK.
13. Shakweh, Y. and Aufleger, P., “Multi-Megawatts, Medium Volt-
age, PWM Voltage Source Sine-Wave Converter For Industrial
Drive Applications,” Power Electronics & Variable Speed Drives
Conference (PEVD’98), UK, London, 21–23 September 98.
14. Shakweh, Y., Lewis, E.A., and Gent, A., “High-power drives
for mining applications,” Minmech 98, South Africa, September
1998.
15. Crane, A. and McCoy, T.J., “EMC design for a 19 MW PWM motor
drive.” 1999 IEEE Industry Applications Society Annual Meeting’99,
Vol.3, pp. 1590–1995.
16. Stromquist, R. and Gustafson, S., “SUBSIS – World’s First Separation
and Injection System,” ABB Review, 6/1998.
17. Clegg, B., et al., “The Application of Drives and Generator Technol-
ogy to a Modern Container Ship,” IEE, PEVD98, London, UK.
18. Elliott, N.J., “Novel Application of a Linear Synchronous Motor
Drive,” IEE Colloquium on “Update on New Power Electronics
Techniques,” IEE, London, May 23 1997.
19. Shakweh, Y., “Power Devices for MV PWM VSI Converters”, Power
Engineering Journal, IEE, U.K., December 1999.
20. Richmond, A.W., ‘A Practical Engineer’s handbook, Industrial Elec-
tric Drives’, Drives & Controls Publications, Kamtech Publishing Ltd,
Croydon, Surrey, UK.
21. Direct Torque Control, ABB Technical Guide No.1.

33
Motor Drives
M. F. Rahman
School of Electrical Engineering and
Telecommunications, The
University of New South Wales,
Sydney, New South Wales 2052,
Australia
D. Patterson
Northern Territory Centre for Energy
Research, Faculty of Technology,
Northern Territory University,
Darwin, Northern Territory 0909,
Australia
A. Cheok
Department of Electrical and
Computer Engineering, National
University of Singapore, 10 Kent
Ridge Crescent, Singapore
R. Betz
Department of Electrical and
Computer Engineering,
University of Newcastle,
Callaghan, New South Wales,
Australia
33.1 Introduction......................................................................................... 858
33.2 DC Motor Drives .................................................................................. 859
33.2.1 Introduction • 33.2.2 DC Motor Representation and Characteristics • 33.2.3 Converters
for DC Drives • 33.2.4 Drive System Integration • 33.2.5 Converter-DC Drive System
Considerations
33.3 Induction Motor Drives.......................................................................... 865
33.3.1 Introduction • 33.3.2 Steady-state Representation • 33.3.3 Characteristics and Methods
of Control • 33.3.4 Vector Controls
33.4 Synchronous Motor Drives ..................................................................... 877
33.4.1 Introduction • 33.4.2 Steady-state Equivalent-circuit Representation of the Motor
• 33.4.3 Performance with Voltage-source Drive • 33.4.4 Characteristics under Current-source
Inverter (CSI) Drive • 33.4.5 Brushless DC Operation of the CSI-driven Motor
• 33.4.6 Operating Modes • 33.4.7 Vector Controls
33.5 Permanent-magnet AC Synchronous Motor Drives ..................................... 885
33.5.1 Introduction • 33.5.2 The Surface-magnet Synchronous Motor
• 33.5.3 The PM Sinewave Motor
33.6 Permanent-magnet Brushless DC Motor Drives .......................................... 891
33.6.1 Machine Background • 33.6.2 Electronic Commutation • 33.6.3 Current/Torque
Control • 33.6.4 The Signal Processing for Producing Switch Drive Signals from Hall Effect
Sensors and Current Sensors • 33.6.5 Summary
33.7 Servo Drives ......................................................................................... 902
33.7.1 Introduction • 33.7.2 Servo Drive Performance Criteria • 33.7.3 Servo Motors, Shaft
Sensors, and Coupling • 33.7.4 The Inner Current/Torque Loop • 33.7.5 Sensors for
Servo Drives • 33.7.6 Servo Control-loop Design Issues
33.8 Stepper Motor Drives............................................................................. 907
33.8.1 Introduction • 33.8.2 Motor Types and Characteristics • 33.8.3 Mechanism of Torque
Production • 33.8.4 Single- and Multi step Responses • 33.8.5 Drive Circuits
• 33.8.6 Micro Stepping • 33.8.7 Open-loop Acceleration–Deceleration Profiles
33.9 Switched-reluctance Motor Drives ............................................................ 915
33.9.1 Introduction • 33.9.2 Advantages and Disadvantages of Switched-reluctance Motors
• 33.9.3 Switched-reluctance Motor Variable-speed Drive Applications • 33.9.4 SR Motor and
Drive Design Options • 33.9.5 Operating Theory of the Switched-reluctance Motor: Linear
Model • 33.9.6 Operating Theory of the SR Motor (II): Magnetic Saturation and Nonlinear
Model • 33.9.7 Control Parameters of the SR Motor • 33.9.8 Position Sensing
33.10 Synchronous Reluctance Motor Drives ...................................................... 926
33.10.1 Introduction • 33.10.2 Basic Principles • 33.10.3 Machine Structure
• 33.10.4 Basic Mathematical Modeling • 33.10.5 Control Strategies and Important Parameters
• 33.10.6 Practical Considerations • 33.10.7 A Syncrel Drive System • 33.10.8 Conclusion
References ............................................................................................ 932
Further Reading .................................................................................... 932
Copyright © 2007, 2001, Elsevier Inc.
All rights reserved.
857
858 M. F. Rahman et al.
33.1 Introduction
The widespread proliferation of power electronics and ancil-
lary control circuits into motor control systems in the past two
or three decades have led to a situation where motor drives,
which process about two-thirds of the world’s electrical power
into mechanical power, are on the threshold of processing
all of this power via power electronics. The days of driving
motors directly from the fixed ac or dc mains via mechanical
adjustments are almost over.
The marriage of power electronics with motors has meant
that processes can now be driven much more efficiently with a
much greater degree of flexibility than previously possible. Of
course, certain processes are more favorable to certain types
of motors, because of the more favorable match between their
characteristics. Historically, this situation was brought about
by the demands of the industry. Increasingly, however, power
electronic devices and control hardware are becoming able to
easily tailor the rigid characteristics of the motor (when driven
from a fixed dc or ac supply source) to the requirements of the
load. Development of novel forms of machines and control
techniques therefore has not abated, as recent trends would
indicate.
It should be expected that just as power electronics equip-
ment has tremendous variety, depending on the power level
of the application, motors also come in many different types,
depending on the requirements of application and power level.
Often the choice of a motor and its power electronic drive
circuit for application are forced by these realities, and the
application engineer therefore needs to have a good under-
standing of the application, the available motor types, and
the suitable power electronic converter and its control tech-
niques. Table 33.1 gives a rough guide of combinations of
suitable motors and power electronic converters for a few
typical applications.
TABLE 33.1 Typical motor, converter, and application guides
Motor Type of converter Type of control Applications
Brushed dc motor Thyristor ac–dc converter Phase control, with inner current
loop
Process rolling mills, winders, locomotives, large cranes,
extruders, and elevators
GTO/IGBT/MOSFET
chopper
Pulse-width modulator(PWM)
control with inner current loop
Drives for transportation, machine tools, and office
equipment
Induction motor (cage) Back-back thyristor Phase control Pumps, and compressors
IGBT/GTO inverter/
cycloconverter
PWM V-f control General-purpose industrial drive such as for cranes, pumps,
fans, elevators, material transport and handling,
extruders, and subway trains
IGBT/GTO Vector control High-performance ac drives in transportation, motion
control, and automation
Induction motor (slip-ring) Thyristor ac–dc converter Phase control with dc-link
current loop
Large pumps, fans, and cement kilns
Synchronous motor (excited) Thyristor ac–dc converter DC-link current loop Large pumps, fans, blowers, compressors, and rolling mills
Synchronous motor (PM) IGBT/MOSFET inverter PWM current control High-performance ac servo drives for office equipment,
machine tools, and motion control
For many years, the brushed dc motor has been the natural
choice for applications requiring high dynamic performance.
Drives of up to several hundred kilowatts have used this type
of motor. In contrast, the induction motor was considered
for low-performance, adjustable-speed applications at low and
medium power levels. At very high power levels, the slip-ring
induction motor or the synchronous motor drive were the
natural choices. These boundaries are increasingly becoming
blurred, especially at the lower power levels.
Another factor for motor drives was the consideration for
servo performance. The ever-increasing demand for greater
productivity or throughput and higher quality of most of the
industrial products that we use in our everyday lives means
that all aspects of dynamic response and accuracy of motor
drives have to be increased. Issues of energy efficiency and har-
monic proliferation into the supply grid are also increasingly
affecting the choices for motor-drive circuitry.
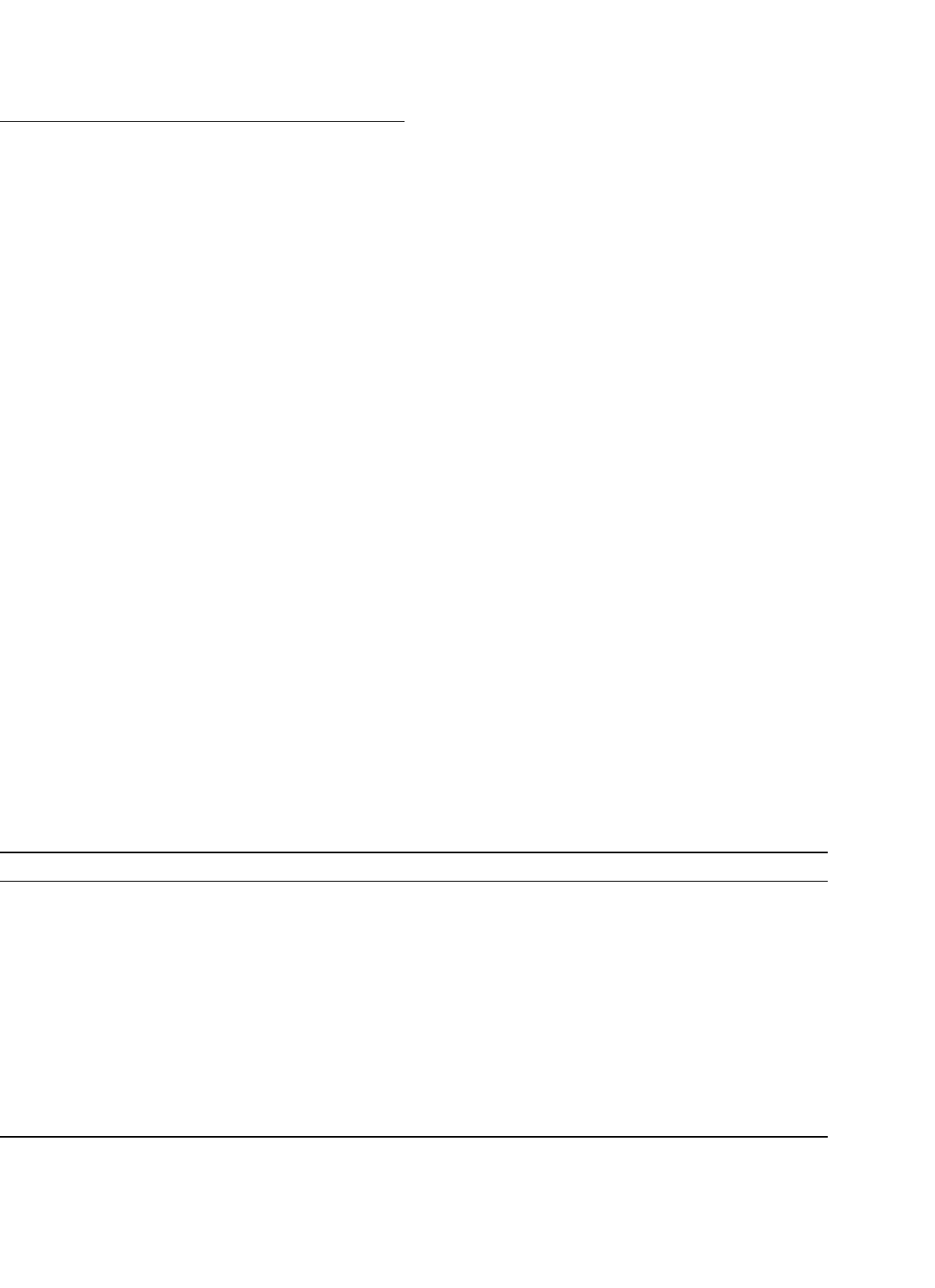
A typical motor-drive system is expected to have some of
the system blocks indicated in Fig. 33.1. The load may be a
conveyor system, a traction system, the rolls of a mill drive,
the cutting tool of a numerically controlled machine tool,
the compressor of an air conditioner, a ship propulsion sys-
tem, a control valve for a boiler, a robotic arm, and so on.
The power electronic converter block may use diodes, metal-
oxide semiconductor field effect transistors (MOSFETS), gate
turn-off thyristors (GTOs), insulated gate bipolar transistors
(IGBTs), or thyristors. The controllers may consist of sev-
eral control loops, for regulating voltage, current, torque, flux,
speed, position, tension, or other desirable conditions of the
load. Each of these may have their limiting features purposely
placed in order to protect the motor, the converter, or the
load. The input commands and the limiting values to these
controllers would normally come from the supervisory con-
trol systems that produce the required references for a drive.
This supervisory control system is normally more concerned
33 Motor Drives 859
Power Electronic
Converter
Motor
Transmission
Load
Drive Controllers
Drive References
Supervisory Control System
AC supply
FIGURE 33.1 Block diagram of a typical motor-drive system.
with the overall operation of the process rather than the
drive.
Consequently, a vast array of choices and technologies
exist for a motor-drive application. Against this background,
this chapter gives a brief description of the dominant forms
of motor drives in current usage. The interested reader is
expected to consult the further reading material listed at the
end of this chapter for more detailed coverage.
33.2 DC Motor Drives
33.2.1 Introduction
Direct-current motors are extensively used in variable-speed
drives and position-control systems where good dynamic
response and steady-state performance are required. Examples
are in robotic drives, printers, machine tools, process rolling
mills, paper and textile industries, and many others. Con-
trol of a dc motor, especially of the separately excited type,
is very straightforward, mainly because of the incorporation
of the commutator within the motor. The commutator-brush
allows the motor-developed torque to be proportional to the
armature current if the field current is held constant. Classical
control theories are then easily applied to the design of the
torque and other motion loops of a drive system.
The mechanical commutator limits the maximum applica-
ble voltage to about 1500 V and the maximum power capacity
to a few hundred kilowatts. Series or parallel combinations of
more than one motor are used, when dc motors are applied
in applications that handle larger loads. The maximum arma-
ture current and its rate of change are also limited by the
commutator.
33.2.2 DC Motor Representation and
Characteristics
The dc motor has two separate sources of fluxes that interact to
develop torque. These are the field and the armature circuits.
Because of the commutator action, the developed torque is
given by
T = Ki
f
i
a
(33.1)
where i
f
and i
a
are the field and the armature currents, respec-
tively, and K is a constant relating motor dimensions and
parameters of the magnetic circuits.
The dynamic and the steady-state responses of the motor
and load are given by
Dynamic Steady-state
v
a
= R
a
i
a
+L
a
di
a
dt
+eV
a
= R
a
I
a
+E (33.2)
v
f
= R
f
i
f
+L
f
di
f
dt
V
f
= R
f
I
f
(33.3)
e = Ki
f
ω E = KI
f
ω (33.4)
T = J
dω
dt
+Dω + T
L
T = J ω + T
L
(33.5)
where J , D, and T
L
are the moment of inertia, damping fac-
tor, and load torque, respectively, referred to the motor, and
the subscripts a and f refer to the armature and field circuits,
respectively. R, L, I, and E refer to resistance, inductance, cur-
rent, and back-emf of the motor in associated circuits referred
by the subscripts.
860 M. F. Rahman et al.
v
a
e
a
R
a
L
a
v
f
i
a
R
f
L
f
i
f
(a)
V
a
R
f
L
f
R
a
(b)
E
a
I
a
L
a
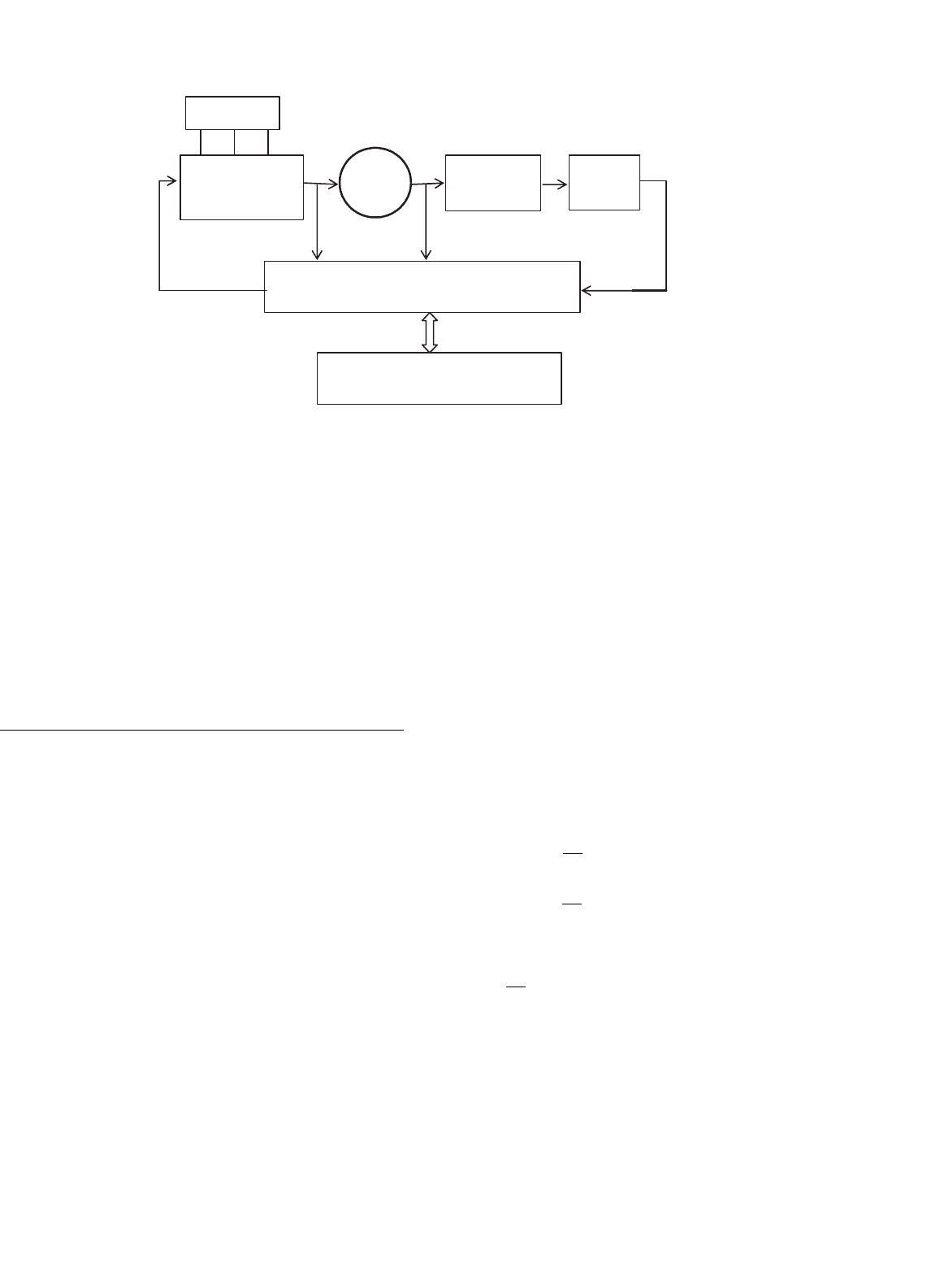
FIGURE 33.2 Representation of the separate and series excited motor
circuits: (a) separately excited dc motor circuit and (b) series excited dc
motor circuit.
Small servo-type dc motors normally have (PM)
permanent-magnet excitation for the field, whereas larger size
motors tend to have separate field-supply, V
f
, for excitation.
The separately excited dc motors represented in Fig. 33.2a,
have fixed field excitation, and these motors are very easy to
control via the armature current that is supplied from a power
electronic converter. Thyristor ac–dc converters with phase
angle control are popular for the larger size motors, whereas
the duty-cycle controlled pulse-width modulated switching
dc–dc converters are popular for servo motor drives. The
series-excited dc motor has its field circuit in series with the
armature circuit as shown in Fig. 33.2b. Such a connection
gives high torque at low speed and low torque at high speed,
a pseudo constant-power-like characteristic that may match
traction-type loads well.
Torque–speed characteristics of the separately and series
excited dc motors are indicated in Figs. 33.3a and b, respec-
tively. The speed of the separately excited dc motor drops with
load, the net drop being about 5–10% of the base speed at
full load. The voltage drop across the armature resistance and
the armature reaction are responsible for this. Operation of
the motor above the base speed at which the armature volt-
age reaches for the rated field excitation is by means of field
weakening, whereby the field current is reduced in order to
increase speed beyond the base speed. The armature voltage
is now maintained at the rated value actively, by overriding
the field control if required. Note that the range of field con-
trol is limited because of the magnetic nonlinearity of the field
circuit and the problem of good commutation at weak field.
(a)
(b)
T
L
, Nm
T
L
, Nm
−T, Nm
−T
L
V
a
−V
a
w
m
, rad/sec
w
m
, rad/sec
−w
m
, rad/sec
−w
m
V
a
increases
−V
a
increases
FIGURE 33.3 Torque–speed characteristics of the (a) separately and
(b) series excited motors.
Usually, the top speed is limited to about three times the base
speed. Note also that field weakening results in reduced torque
production per ampere of armature current. Depending on
the type of load, the armature current, and speed change as
dictated by Eqs. (33.1)–(33.5).
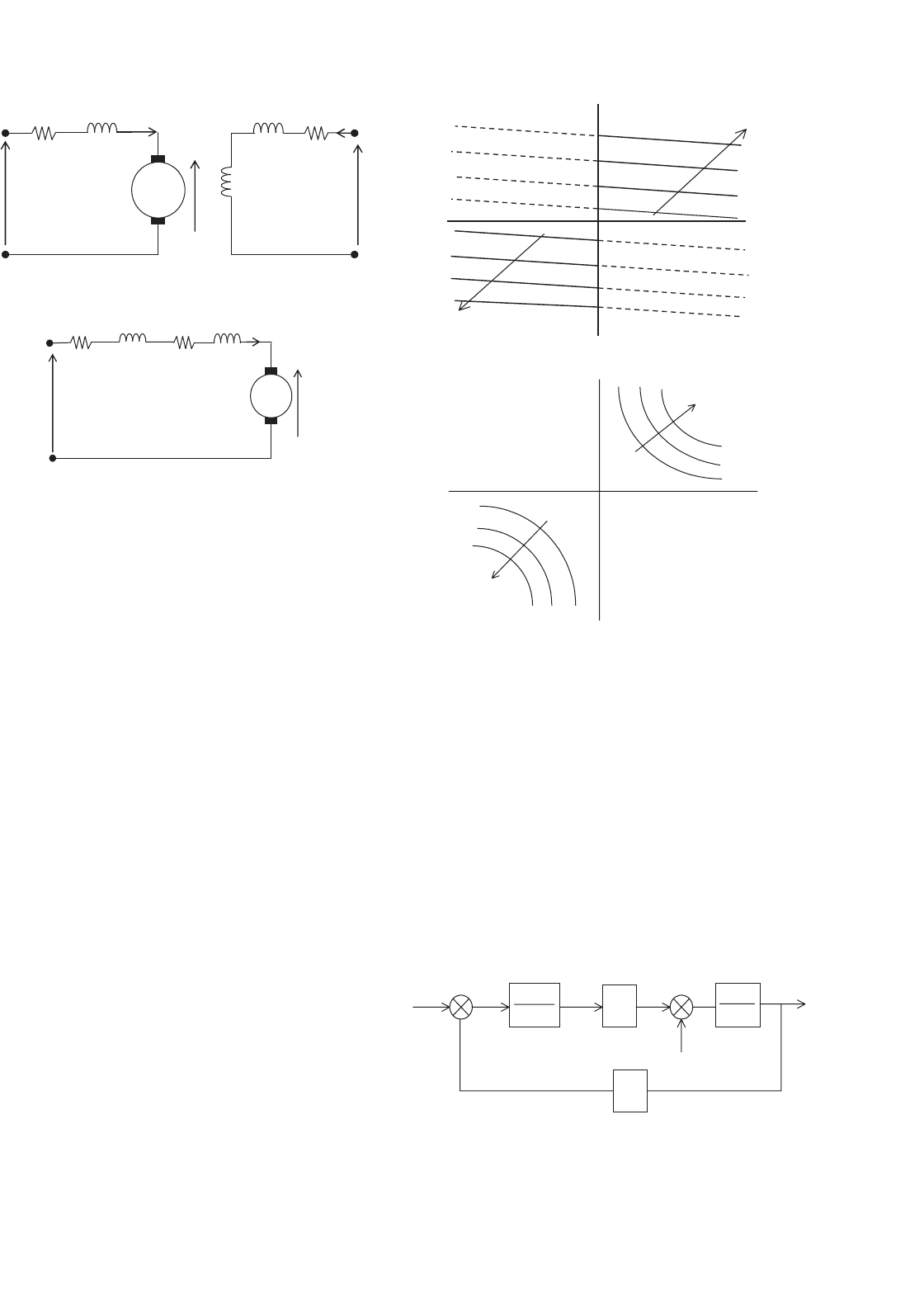
For the separately excited dc motor, assuming that the field
excitation is held constant, the transfer characteristic between
the shaft speed and the applied voltage to the armature can
be expressed as indicated in the block diagram of Fig. 33.4.
If we ignore the load torque T
L
, the transfer characteristic is
1 +sT
a
1/R
a
J
T
s +D
1
V
a
(s)
I
a
(s)
T
L
(s)
K
T
K
E
T(s)
E
a
(s)
−
−
w
m
(s)
FIGURE 33.4 Transfer characteristic block diagram of a separately
excited motor.
33 Motor Drives 861
given by
ω
m
V
a
=
K
T
(
sL
a
+R
a
)(
Js +D
)
+K
E
K
T
(33.6)
the characteristic roots of which are given by
s +
1
T
a
s +
D
J
+
1
T
a
T
m
= 0 (33.7)
If we compare this with a standard second-order system, the
undamped natural frequency and damping factor are given by
ω
n
=
1
T
a
1
T
m
+
D
J
(33.8)
and
σ = ξω
n
=
1
2
1
T
a
+
D
J
(33.9)
where, T
m
= mechanical time constant =
R
a
J
K
E
K
T
in which
K
E
= Ki
f
= K
T
in SI units, and T
a
= electrical time
constant =
L
a
R
a
.
The speed response of the motor around an operating speed
to the application of load torque on the shaft is given by
ω
m
T
L
=
1 +sT
a
(
1 +sT
a
)(
Js +D
)
+
K
E
K
T
R
a
(33.10)
33.2.3 Converters for DC Drives
Depending on the application requirements, the power con-
verter for a dc motor may be chosen from a number of
topologies. For example, a half-controlled thyristor converter
or a single-quadrant pulse-width modulated (PWM) switch-
ing converter may be adequate for a drive that does not
require controlled deceleration with regenerative braking. On
the other hand, a full four-quadrant thyristor or transistor con-
verter for the armature circuit and a two-quadrant converter
for the field circuit may be required for a high-performance
drive with a wide speed range.
The frequency at which the power converter is switched, e.g.
100 Hz for a single-phase thyristor bridge converter sup-
plied from a 50 Hz ac source (or 300 Hz for a three-phase
thyristor bridge converter), 20 kHz for a PWM MOSFET
H-bridge converter, and so on, has a profound effect on the
dynamics achievable with a motor drive. Low-power switching
devices tend to have faster switching capability than high-
power devices. This is convenient for low-power motors since
these are normally required to be operated with high dynamic
response and accuracy.
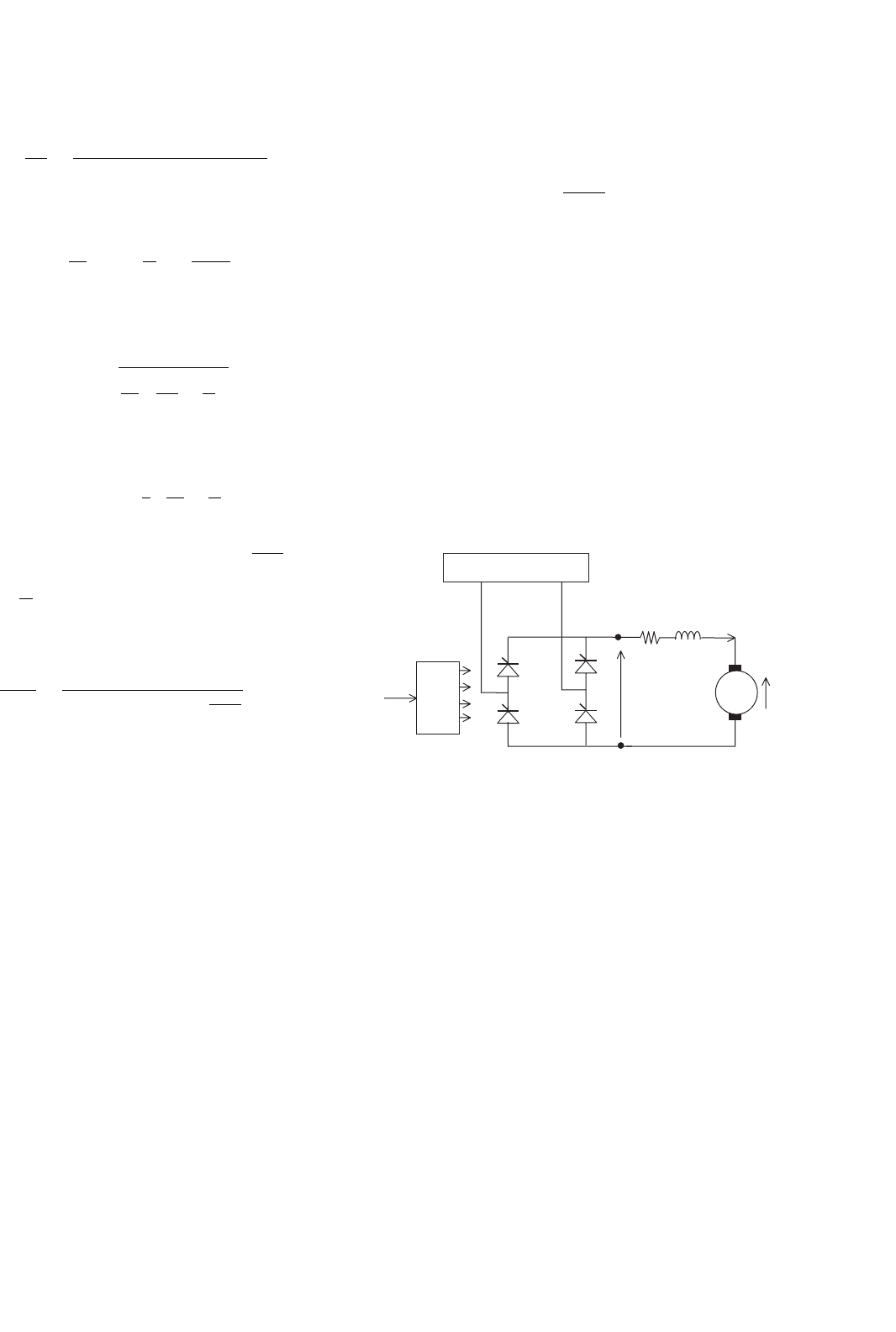
33.2.3.1 Thyristor Converter Drive
Consider the dc drive of Fig. 33.5 for which the armature
supply voltage v
a
to the motor is given by
v
a
=
2V
max
π
cos α (33.11)
where V
max
is the peak value of the line-line ac supply voltage
to the converter and α is the firing angle. The dc output volt-
age v
a
is controllable via the firing angle α, which in turn is
controlled by the control voltage e
c
as the input to the firing
control circuit (FCC). The FCC is synchronized with the mains
ac supply and drives individual thyristors in the ac–dc con-
verter according to the desired firing angle. Depending on the
load and the speed of operation, the conduction of the current
may become discontinuous as indicated in Fig. 33.6a. When
this happens, the converter output voltage does not change
with the control voltage as proportionately as with the con-
tinuous conduction. The motor speed now drops much more
with the load as indicated by Fig. 33.6b. The consequent loss of
gain of the converter may have to be avoided or compensated
if good control over speed is desired.
Power Supply
F
C
C
e
c
T
1
T
3
T
4
T
2
V
max
sin wt
v
a
R
a
e
a
L
a
i
a
FIGURE 33.5 A two-quadrant single-phase thyristor bridge converter
drive.
The output voltage of the simple, two-pulse ac–dc converter
of Fig. 33.5 is rich in ripples of frequency nf, where n is an
even integer starting with two and f is the frequency of the ac
supply. Such low-frequency ripple may derate the motor con-
siderably. Converters with higher pulse number, such as the
6- or 12-pulse converters deliver much smoother output volt-
age and may be desirable for more demanding applications.
A high-performance dc drive for a rolling mill drive may
consist of such converter circuits connected for bidirectional
operation of the drive, as indicated in Fig. 33.7. The interfacing
of the FCC to other motion-control loops, such as speed and
position controllers, for the desired motion is also indicated.
Two fully controlled bridge ac–dc converter circuits are used
back-to-back from the same ac supply. One is for forward and
the other is for reverse driving of the motor. Since each is a
two-quadrant converter, either may be used for regenerative
braking of the motor. For this mode of operation, the braking
converter, which operates in the inversion mode, sinks the
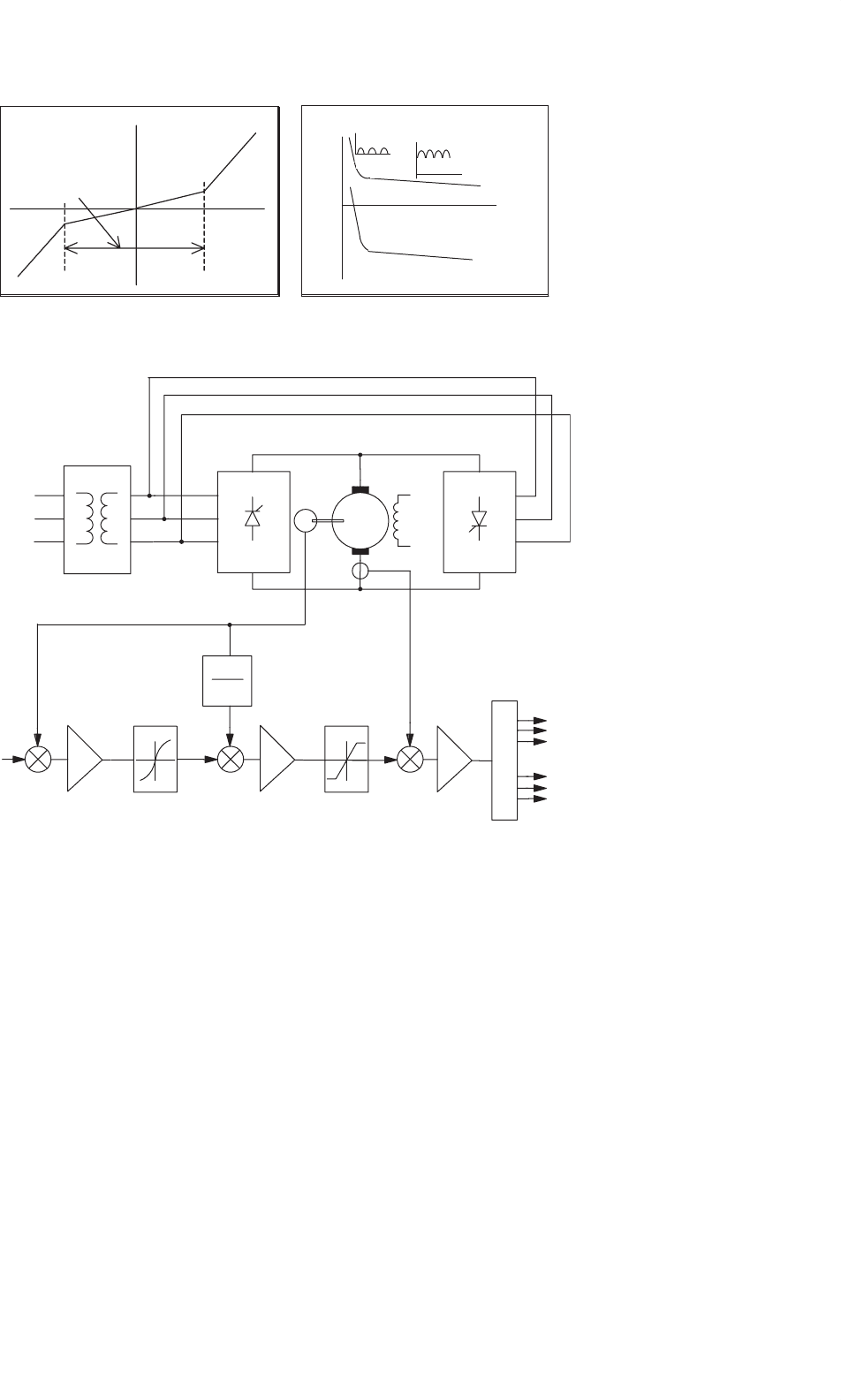
862 M. F. Rahman et al.
e
c
V
a
(a) (b)
Discontinuous
Conduction
t
t
i
a
i
a
I
a
w
a
1
<90°
a
2
>90°
FIGURE 33.6 Converter output voltage and motor torque–speed characteristic with discontinuous conduction.
DCM
+
+
+
−−−
E
ω
ref
ω
AC MAINS
θ
ref
θ
d
dt
e
c
i
F
C
C
FIGURE 33.7 Bidirectional speed and position control system with a back-to-back (dual) thyristor converter.
motor current aided by the back-emf of the motor. The energy
of the overhauling motor now returns to the ac source.
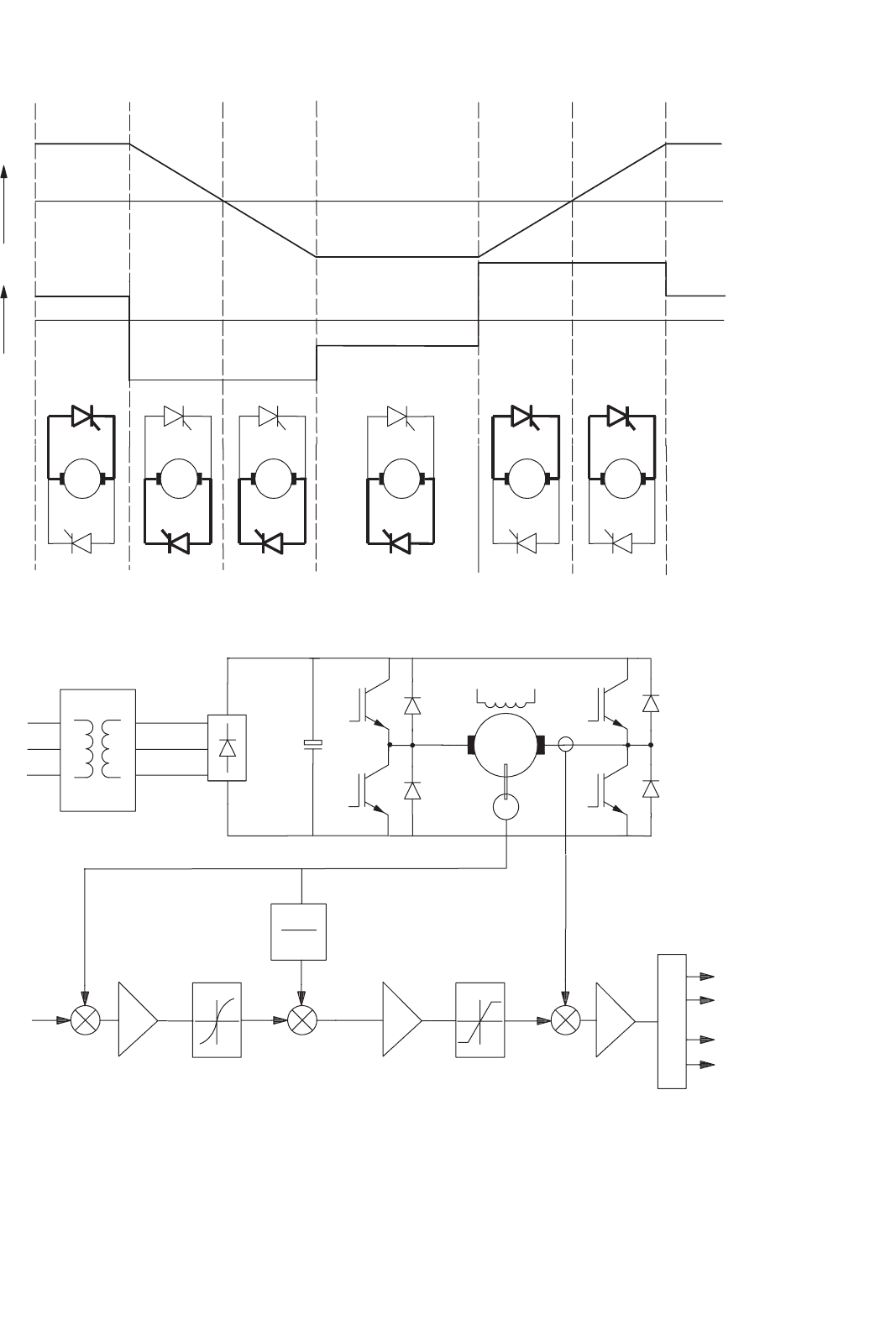
It may be noted that the braking converter may be used
to maintain the braking current at the maximum allowable
level right down to zero speed. A complete acceleration–
deceleration cycle of such a drive is indicated in Fig. 33.8.
During braking, the firing angle is maintained at an appro-
priate value at all times so that the controlled and predictable
deceleration takes place at all times.
The innermost control loop indicated in Fig. 33.7 is for
torque, which translates to an armature current loop for a dc
drive. Speed and position control loops are usually designed
as hierarchical control loops. Operation of each loop is suffi-
ciently decoupled from each other so that each stage can be
designed in isolation and operated with its special limiting
features.
33.2.3.2 PWM Switching Converter Drive
Pulse-width modulated switching converters have traditionally
been referred to as choppers in many traction, and forklift-type
drives. These are essentially PWM dc–dc converters operating
from rectified dc or battery mains. These converters can also
operate in one, two, or four quadrants, offering a few choices to
meet application requirements. Servo drive systems normally
use the full four-quadrant converter of Fig. 33.9 which allows
the bidirectional drive and regenerative braking capabilities.
For forward driving, the transistors T
1
,T
4
, and diode D
2
are used as a buck converter which supplies a variable voltage,
v
a
, to the armature given by
v
a
= δV
DC
(33.12)
where V
DC
is the dc supply voltage to the converter, and δ is
the duty cycle of the transistor T
1
.
33 Motor Drives 863
DCM DCM DCM
DCM DCM DCM
+
+
+
++
+
−
−
−−−−
ω
I
a
Forward
Running
Forward
Braking
Reverse
Acceleration
Reverse
Running
Reverse
Braking
Forward
Acceleration
Forward
Running
FWD FWD
FWD
FWD
FWD FWD
REV
REV REV
REV
REV REV
FIGURE 33.8 Converter conduction and operating duty of a bidirectional drive.
T
1
T
3
T
4
T
2
D
1
D
2
D
4
D
3
T
1
T
2
T
3
T
4
DCM
P
W
M
+
+ +
−
−
−
E
ω
ref
ω
AC MAINS
θ
ref
θ
d
dt
e
c
C
+
−V
DC
+V
DC
i
FIGURE 33.9 Bidirectional speed and position control system with a PWM transistor bridge drive.
864 M. F. Rahman et al.
The duty cycle δ is defined as the duration of the ON-time
of the modulating (switching transistor) as a fraction of the
switching period. The switching frequency is normally dictated
by the application and the type of switching devices selected
for the application.
During regenerative braking in the forward direction, tran-
sistors T
2
and diode D
4
are used as a boost converter that
regulates the braking current through the motor by auto-
matically adjusting the duty cycle of T
2
. The energy of the
overhauling motor now returns to the dc supply through
the diode D
1
, aided by the motor back-emf and the dc sup-
ply. Again, note that the braking converter, comprising T
2
and D
1
, may be used to maintain the regenerative braking
current at the maximum allowable level right down to zero
speed.
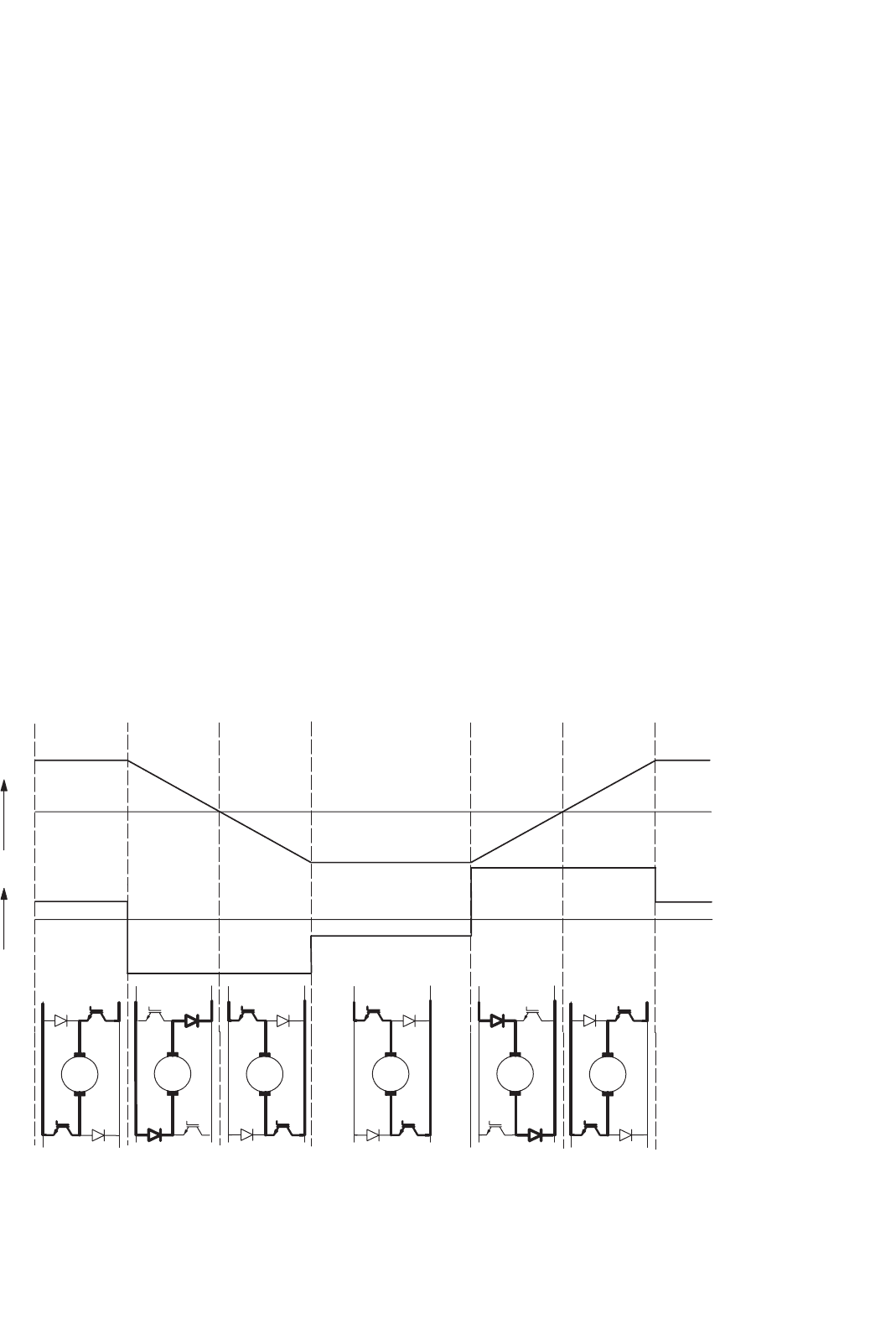
Figure 33.10 shows a typical acceleration–deceleration cycle
of such a drive under the action of the control loops indicated
in Fig. 33.9.
Four-quadrant PWM converter drives such as that in
Fig. 33.10 are widely used for motion- control equipment
in the automation industry. Because of the significant devel-
opment of power switching devices, switching frequencies of
10–20 kHz are easily attainable. At such frequencies, virtually
no derating of the motor is necessary.
In order to satisfy the requirements of a drive application,
simpler versions of the drive circuits indicated in Figs. 33.7
and 33.9 may be used. For instance, for a unidirectional drive,
half of the converter circuits indicated earlier may be used.
DCM DCM DCM DCM DCM DCM
+
+
+
+
+
+
ω
I
a
Forward
Running
Forward
Braking
Reverse
Acceleration
Reverse
Running
Reverse
Braking
Forward
Acceleration
Forward
Running
−−
−−−
−
FIGURE 33.10 Converter conduction and operating duty with a PWM bridge transistor drive.
Further simplification of the drive circuit is possible, if
regenerative braking is not required.
33.2.4 Drive System Integration
A complete drive system has a torque controller (armature cur-
rent controller for a dc drive) as its inner most loop, followed
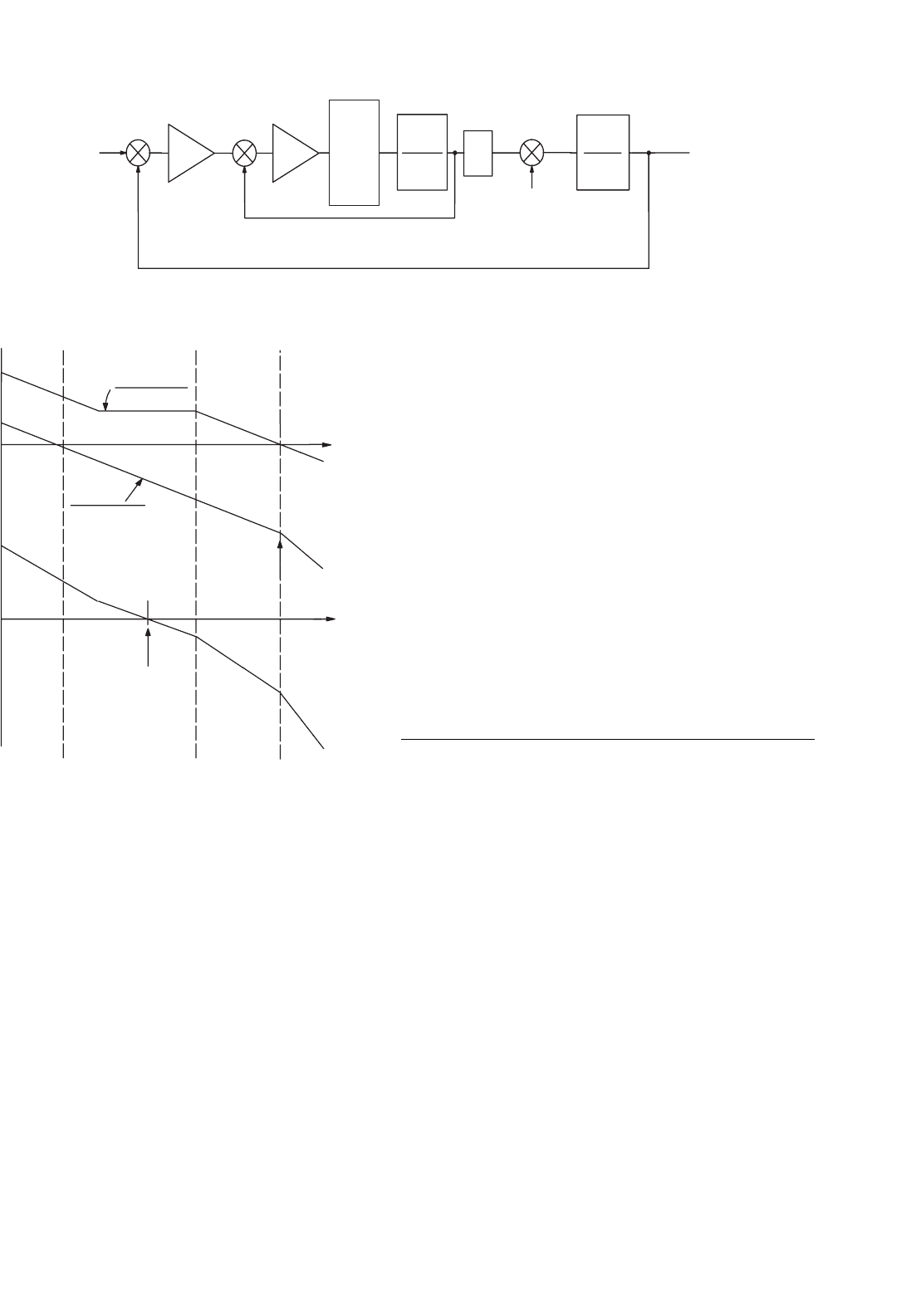
by a speed controller as indicated in Fig. 33.11.
The inner current loop is often regulated with a propor-
tional plus integral (PI) type controller of high gain. The rest
of the inner loop consists of the converter, the motor arma-
ture, which is essentially an R–L circuit with the armature
back-emf as disturbance, and the current sensor. The current
sensor is typically an isolated circuit, such as a Hall sensor or
a direct current transformer (DCT). A well-designed torque
(armature current) loop behaves essentially as a first-order
lag system. Together with the mechanical inertia load, this
loop can be indicated as the middle Bode plot of Fig. 33.12,
in which 1/T
i
represents the current-controlled system band-
width. (Note that the damping factor D and the load torque
T
L
indicated in Fig. 33.11 have been neglected in this descrip-
tion for simplicity.) The current loop is normally designed by
analyzing the block diagram of Fig. 33.11, the converter and
the PI controller for the current loop using Bode analysis or
other control-system design tools.
The next step is usually the design of the speed controller.
The 0-db intercept of 1/Js
(
1 +T
i
s
)
is normally too low. Again,
if a PI controller is selected for the speed loop, its Bode plot
33 Motor Drives 865
K
T
1
R
a
+sL
a
1
Js + D
ω
ref
ω
+
+
ω
CONVERTER
T
L
T
m
i
a
i
ref
−−
FIGURE 33.11 Structure of a closed-loop speed-control system with a dc drive.
db
db
log ω
log ω
Current
Controller
Bandwidth
Speed
Controller
Bandwidth
K(1+T
1
s)
s(1+T
2
)
1
Js(1+T
i
s)
1.0
10.0
100.0
FIGURE 33.12 Typical current and speed control-loop designs for the
system of Fig. 33.11.
is superimposed on the current-controlled system as indicated
in Fig. 33.12 to obtain the desired speed-control bandwidth.
33.2.5 Converter-DC Drive System
Considerations
Several operational factors need to be considered in applying
a dc drive. Some of the important ones are as follows:
(1) The armature current may be rich in harmonics.
This is particularly true for thyristor converters. The
feedback of these current ripples into the FCC may
cause overloading of individual switches and trip-
ping. Adequate filtering is necessary to avoid such
problems.
(2) Since the converter is switched at regular intervals
while the current controller operates continuously,
current overshoot may occur because of the delay in
the FCC. The current controller gains must be limited
to limit this overshoot.
(3) The switching frequency of the converter should be
selected according to the desired motor-current rip-
ple, supply input current harmonics, and the dynamic
performance of the drive.
(4) Ripple in the speed-sensor output limits the perfor-
mance of the speed controller. Analog tachogenerator
output is particularly noisy and defines the upper
limit of the speed-control bandwidth. Digital speed
sensors, such as encoders and resolvers, alleviate this
limit significantly.
33.3 Induction Motor Drives
33.3.1 Introduction
The ac induction motor is by far the most widely used motor
in the industry. Traditionally, it has been used in constant
and variable-speed drive applications that do not cater for fast
dynamic processes. Because of the recent development of sev-
eral new control technologies, such as vector and direct torque
controls, this situation is changing rapidly. The underlying rea-
son for this is the fact that the cage induction motor is much
cheaper and more rugged than its competitor, the dc motor, in
such applications. This section starts with the induction motor
drives that are based on the steady-state equivalent circuit of
the motor, followed by vector-controlled drives that are based
on its dynamic model.
33.3.2 Steady-state Representation
The traditional methods of variable-speed drives are based on
the equivalent circuit representation of the motor shown in
Fig. 33.13.